Submission ID: 00017
ORB (OpenCV), DEGENSAC
Processed: 20-04-22. Download link: sid-00017-orb-2k-both-degensac.json
This page ranks the submission against all others using the same number of keypoints, regardless of descriptor size. Please hover over table headers for descriptions on metrics and full scene names.
Metadata
- Authors: Challenge organizers (contact)
- Keypoint: orb
- Descriptor: orb (32 uint8: 32 bytes)
- Number of features: 2048
- Summary: ORB with (up to) 2048 features, using the built-in matcher (bidirectional filter with the both strategy) and DEGENSAC.
- Paper: N/A
- Website: https://opencv.org
- Origin: Baseline
- Flags: is_baseline
Phototourism / Stereo track
mAA at 10 degrees: 0.08243 (±0.00058 over 3 run(s) / ±0.06056 over 9 scenes)
Rank (per category): 101 (of 108)
| Scene | Features | Matches (matcher) |
Matches (filter) |
Matches (final) |
Rep. @ 3 px. | MS @ 3 px. | mAA(5o) | mAA(10o) |
| bm | 2047.8 | 186.2 | 186.2 | 108.7 | 0.547 Rank: 14/108 |
0.831 Rank: 84/108 |
0.01219 (±0.00101) Rank: 105/108 |
0.03527 (±0.00115) Rank: 107/108 |
| fcs | 2046.3 | 132.5 | 132.5 | 53.8 | 0.290 Rank: 77/108 |
0.598 Rank: 99/108 |
0.09513 (±0.00139) Rank: 99/108 |
0.15883 (±0.00122) Rank: 101/108 |
| lms | 1933.3 | 184.9 | 184.9 | 113.0 | 0.499 Rank: 2/108 |
0.587 Rank: 89/108 |
0.14956 (±0.00216) Rank: 98/108 |
0.22010 (±0.00173) Rank: 98/108 |
| lb | 2045.0 | 101.9 | 101.9 | 38.8 | 0.319 Rank: 44/108 |
0.421 Rank: 99/108 |
0.03479 (±0.00101) Rank: 105/108 |
0.06521 (±0.00093) Rank: 102/108 |
| mc | 2046.9 | 89.8 | 89.8 | 26.8 | 0.251 Rank: 98/108 |
0.424 Rank: 99/108 |
0.01059 (±0.00101) Rank: 105/108 |
0.02279 (±0.00075) Rank: 108/108 |
| mr | 2034.2 | 123.7 | 123.7 | 60.4 | 0.327 Rank: 82/108 |
0.650 Rank: 98/108 |
0.02875 (±0.00070) Rank: 101/108 |
0.05838 (±0.00122) Rank: 101/108 |
| psm | 2044.9 | 119.9 | 119.9 | 72.3 | 0.379 Rank: 7/108 |
0.139 Rank: 99/108 |
0.02146 (±0.00062) Rank: 105/108 |
0.06262 (±0.00115) Rank: 105/108 |
| sf | 2043.6 | 128.3 | 128.3 | 57.2 | 0.341 Rank: 42/108 |
0.514 Rank: 99/108 |
0.03427 (±0.00042) Rank: 98/108 |
0.06633 (±0.00120) Rank: 101/108 |
| spc | 2044.5 | 106.0 | 106.0 | 39.8 | 0.339 Rank: 38/108 |
0.543 Rank: 98/108 |
0.02775 (±0.00030) Rank: 99/108 |
0.05233 (±0.00079) Rank: 101/108 |
| avg | 2031.8 | 130.4 | 130.4 | 63.4 | 0.366 Rank: 32/108 |
0.523 Rank: 99/108 |
0.04606 (±0.00039) Rank: 99/108 |
0.08243 (±0.00058) Rank: 101/108 |
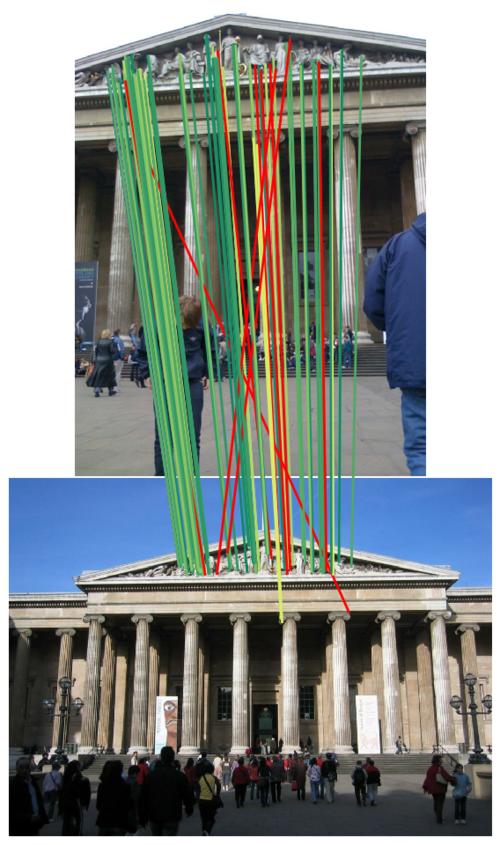
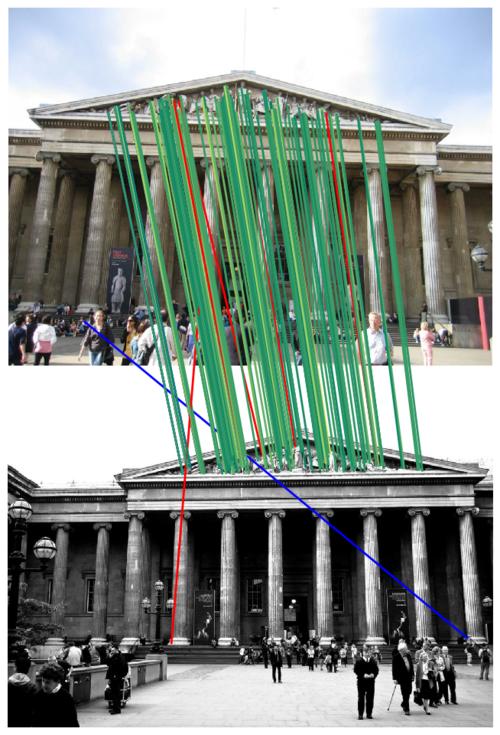
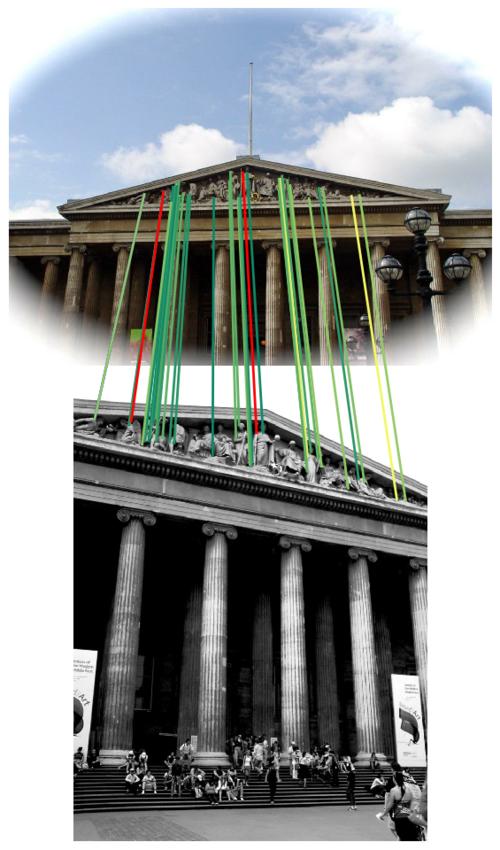
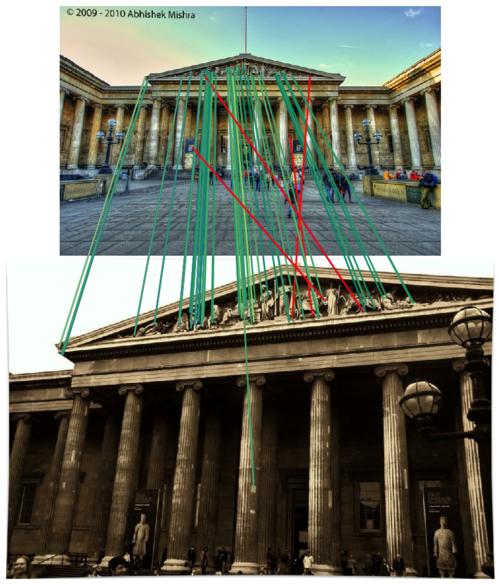
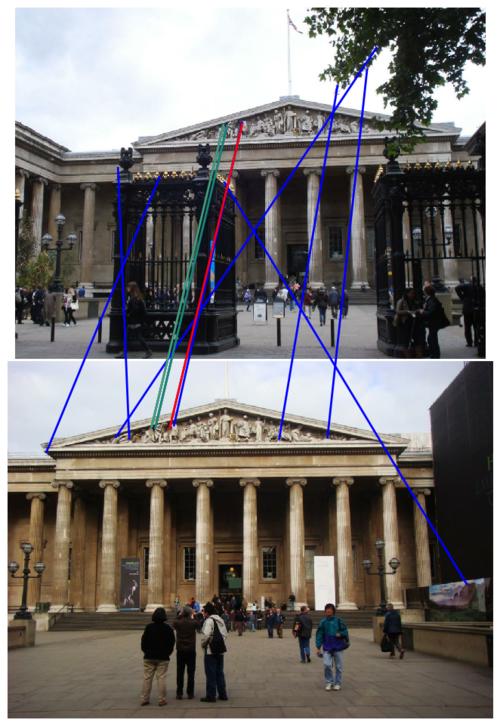
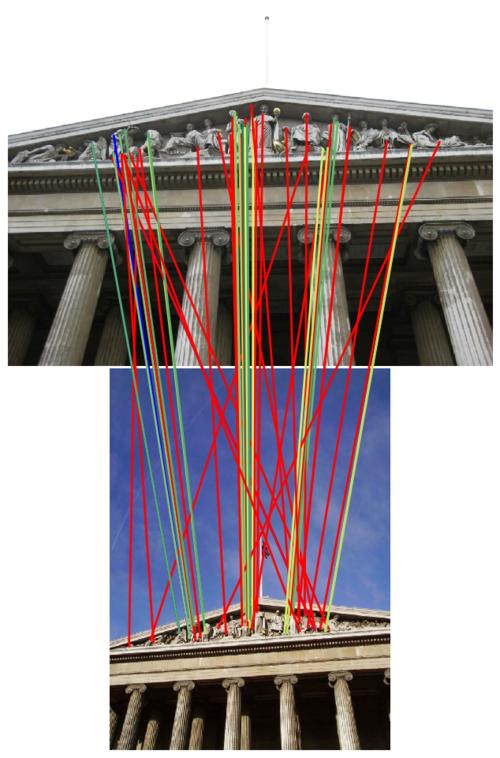
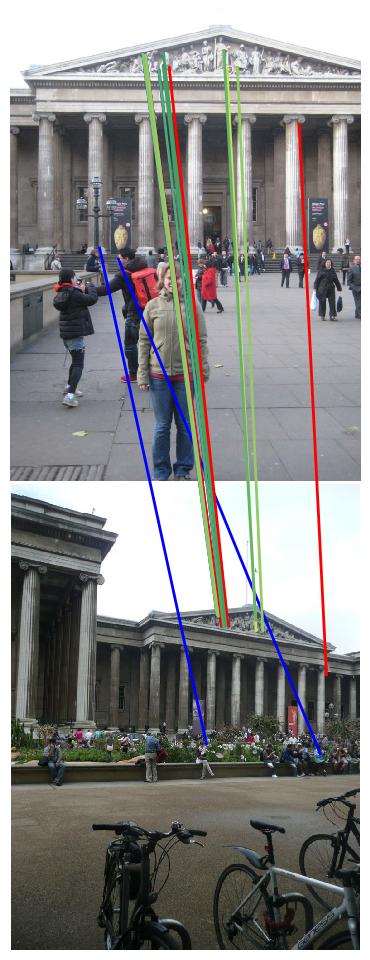
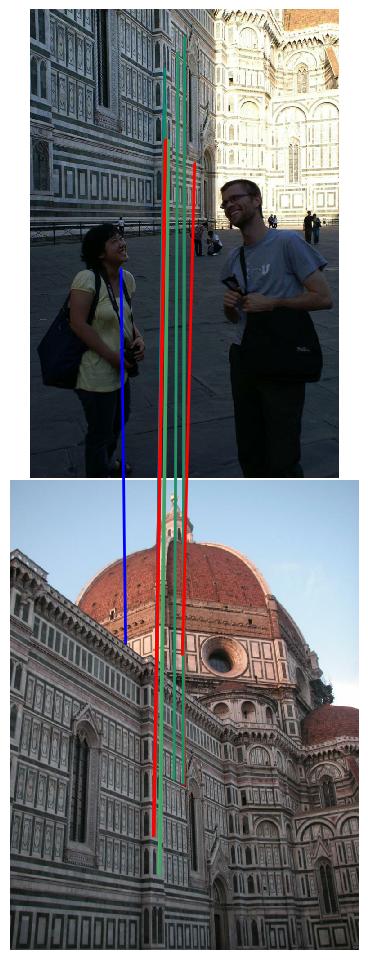
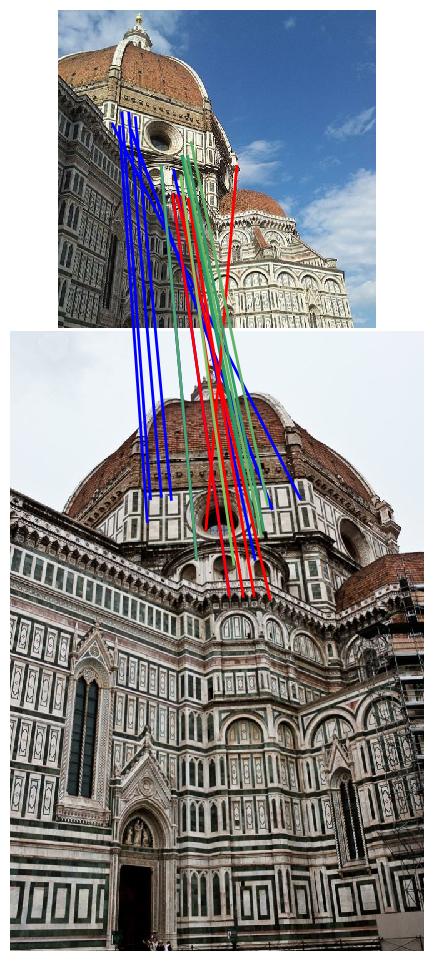
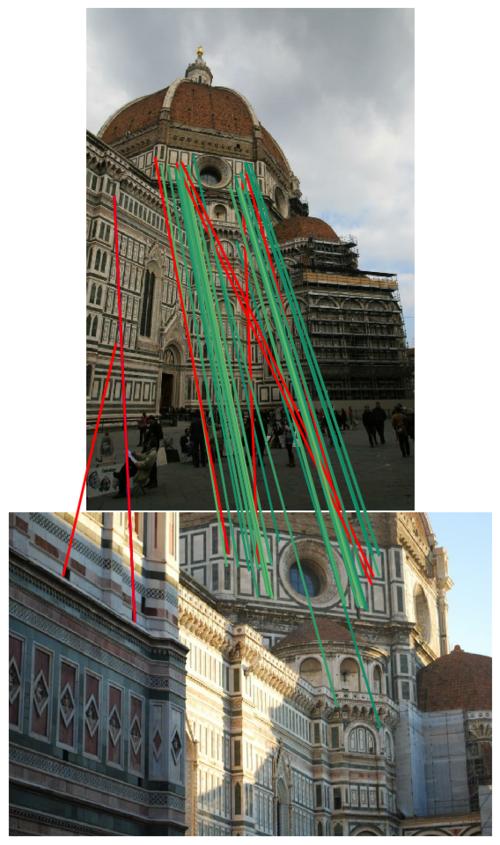
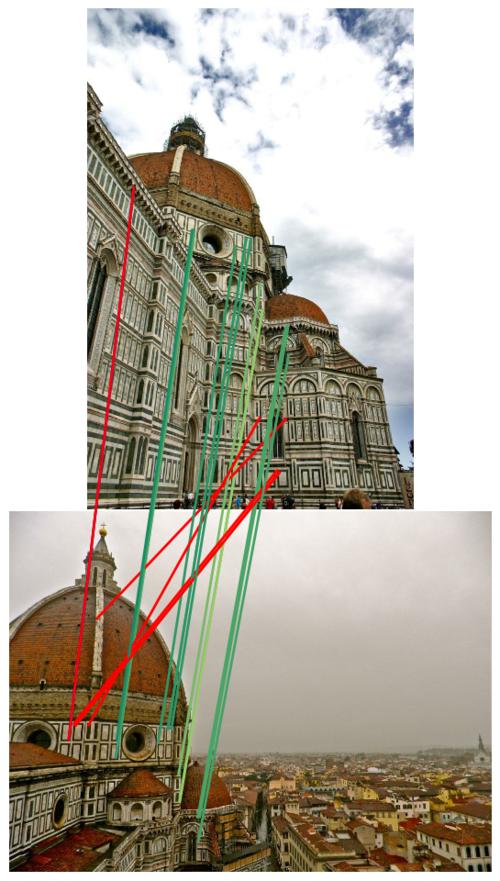
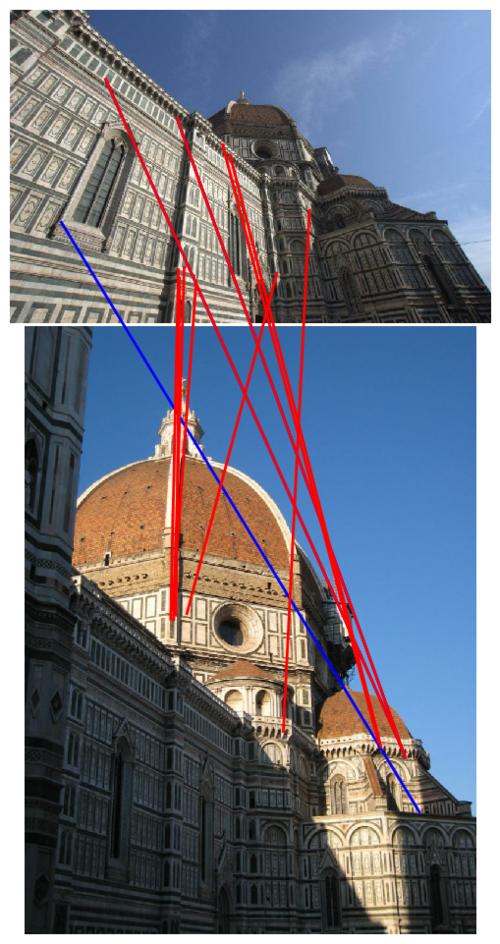
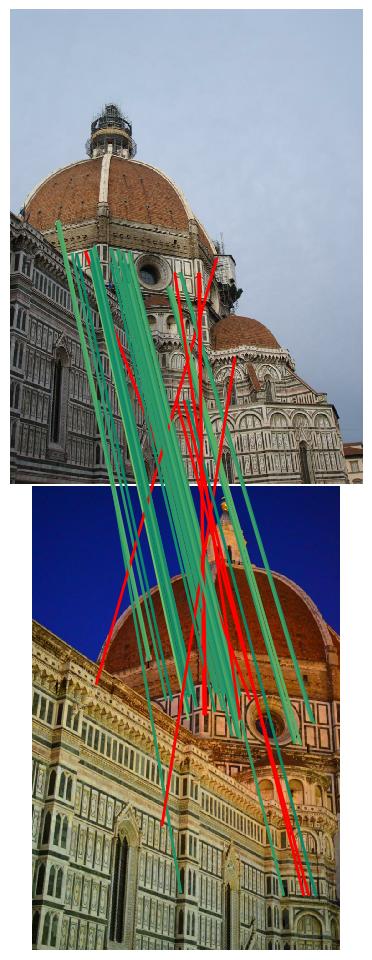
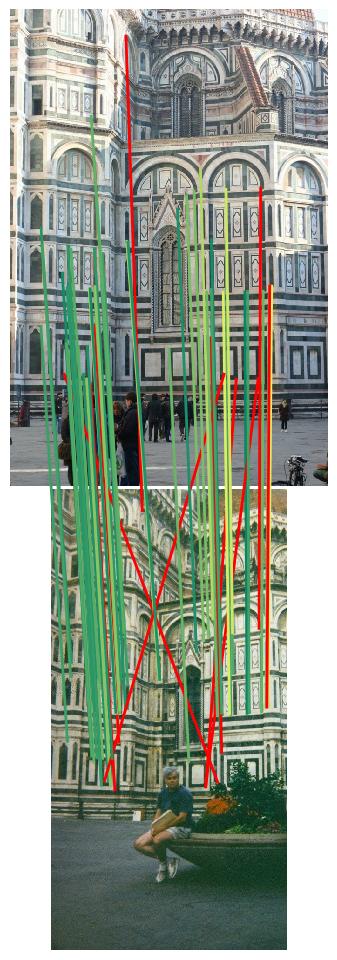
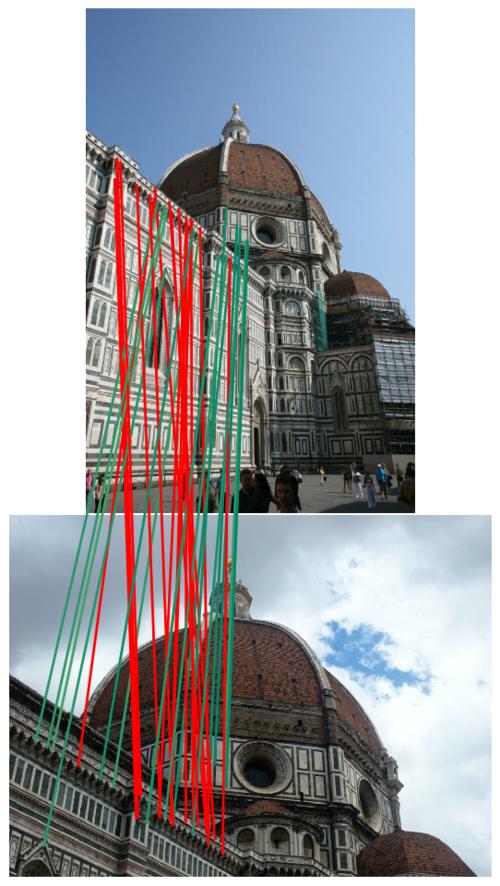
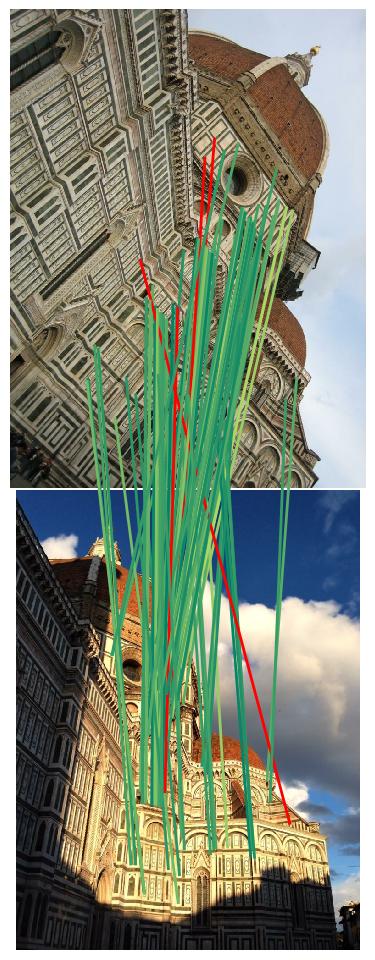
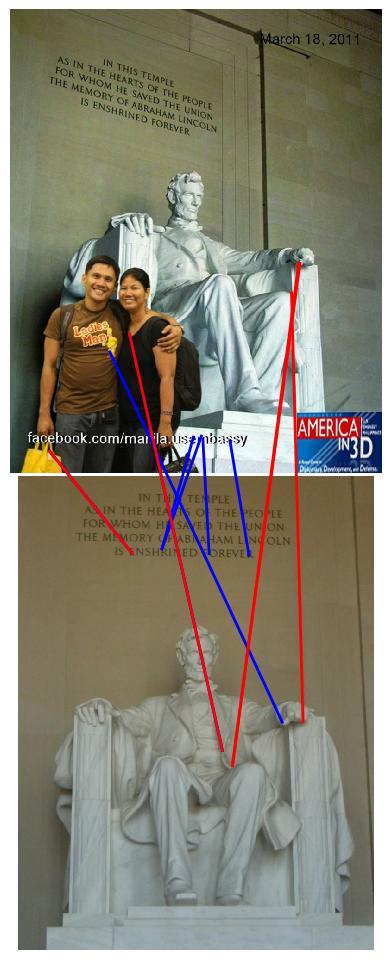
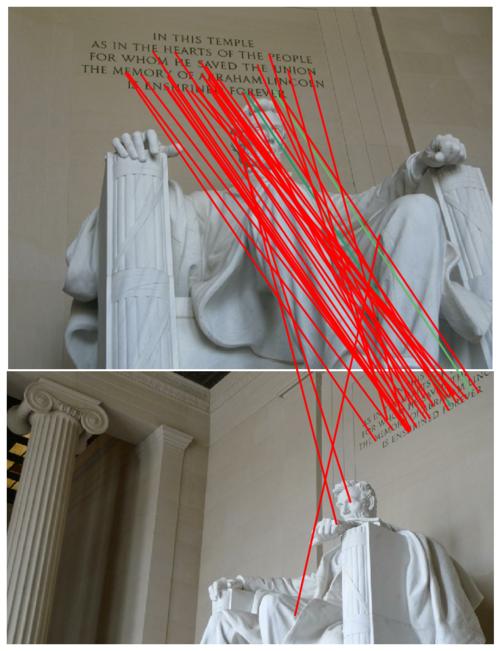
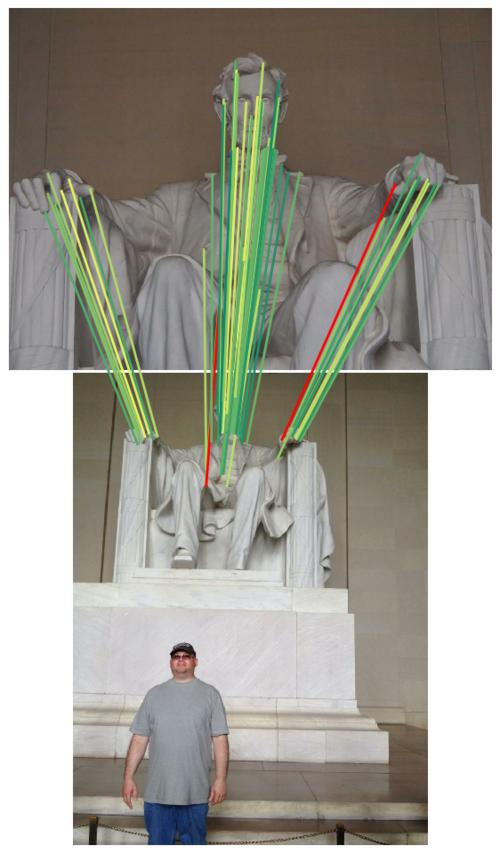
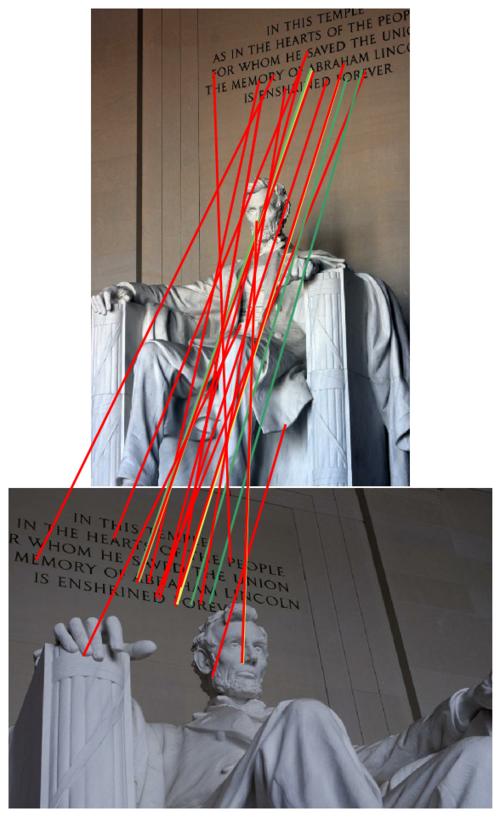
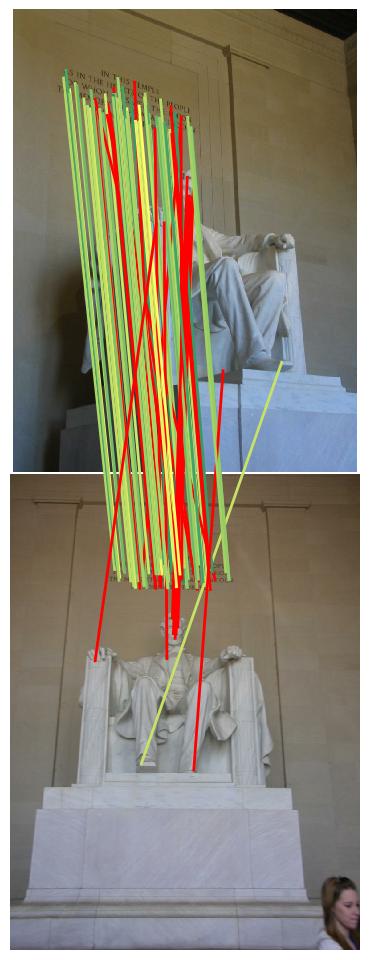
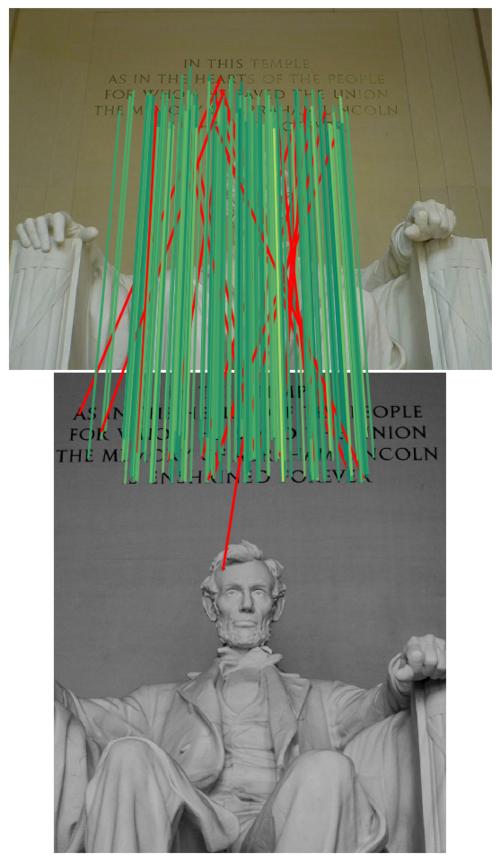
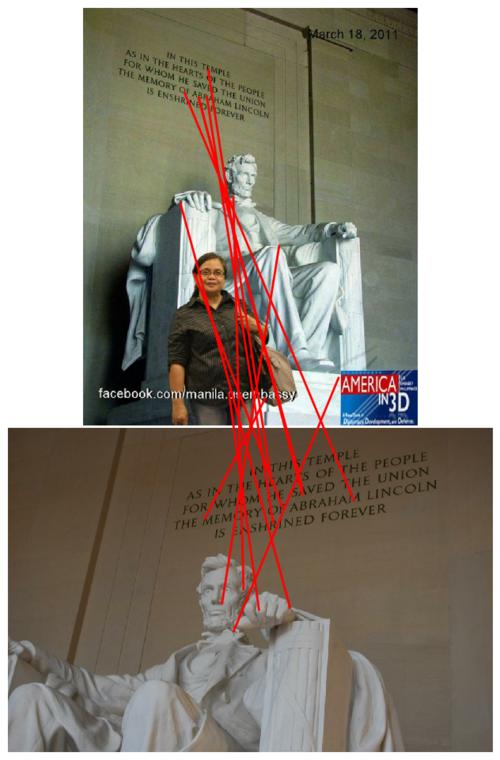
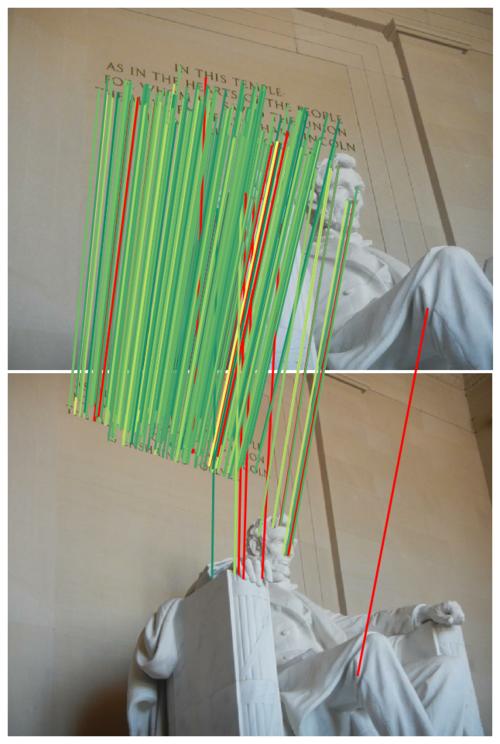
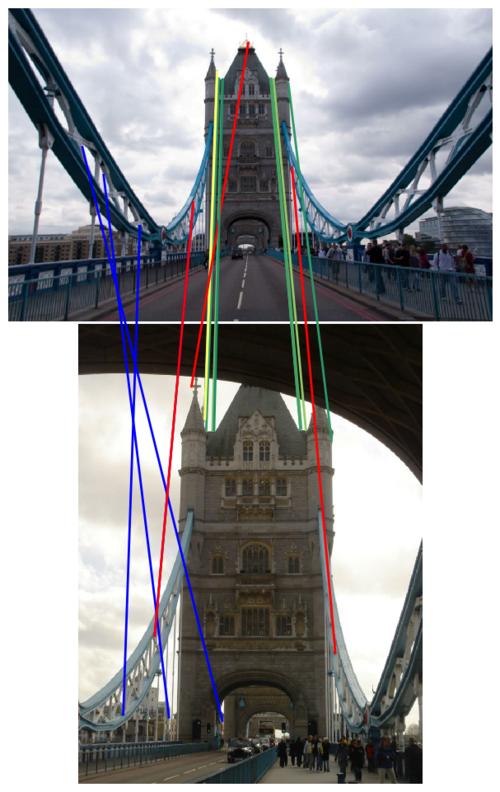
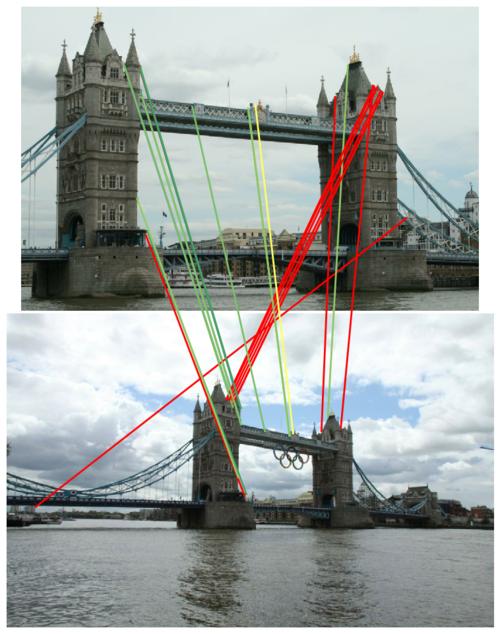
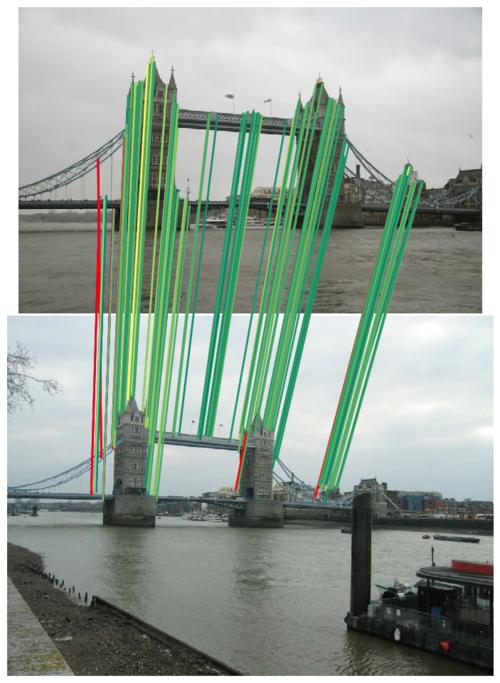
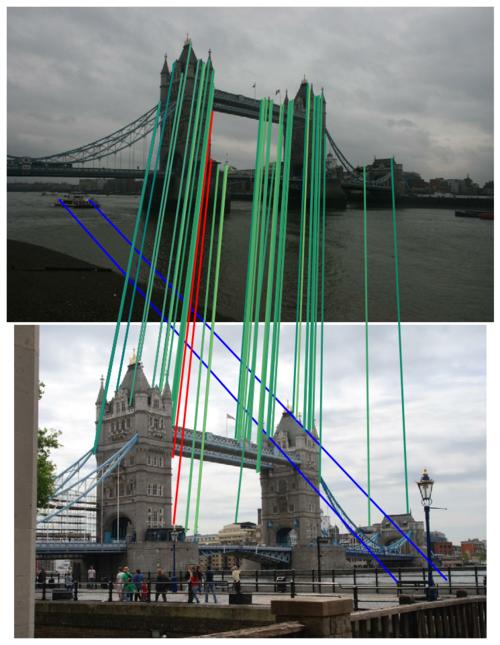
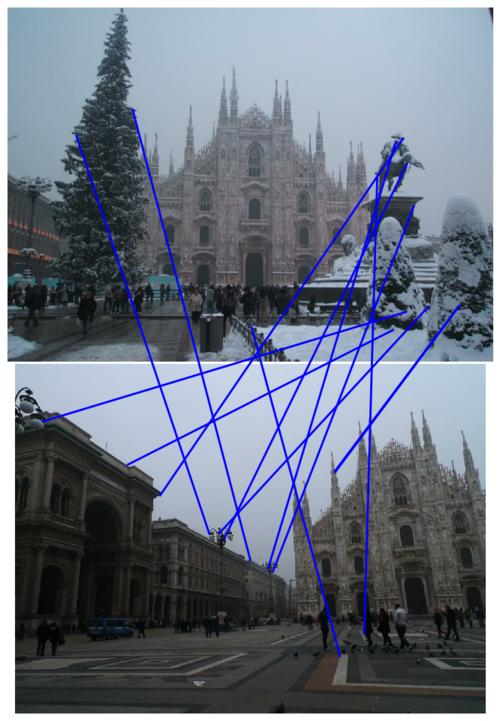
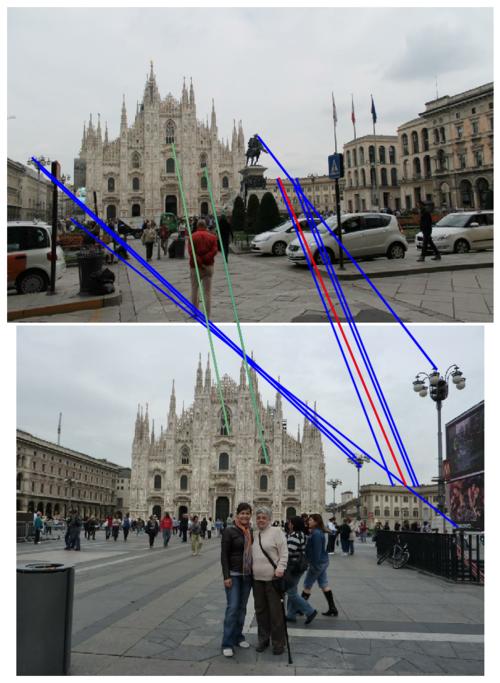
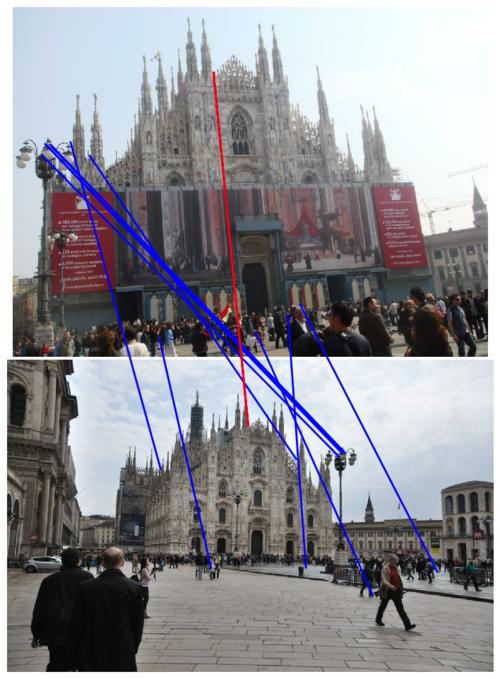
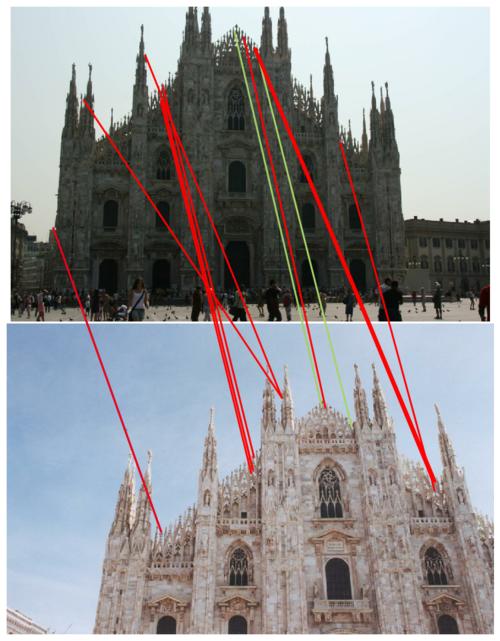
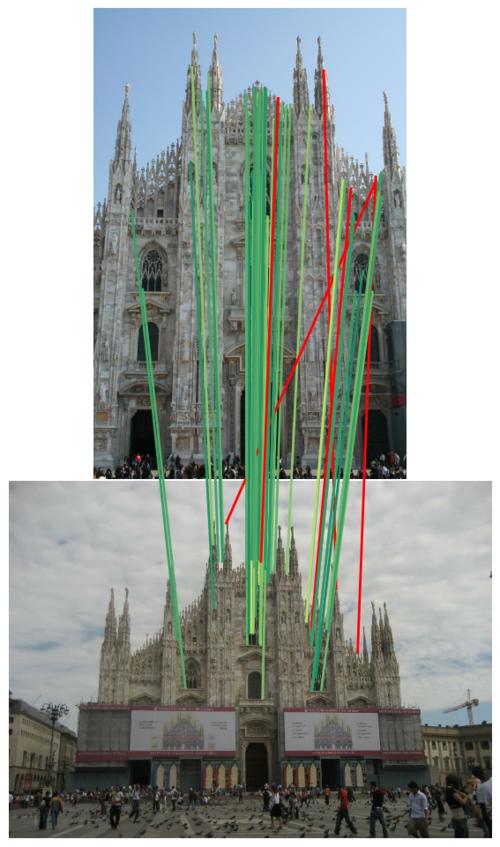
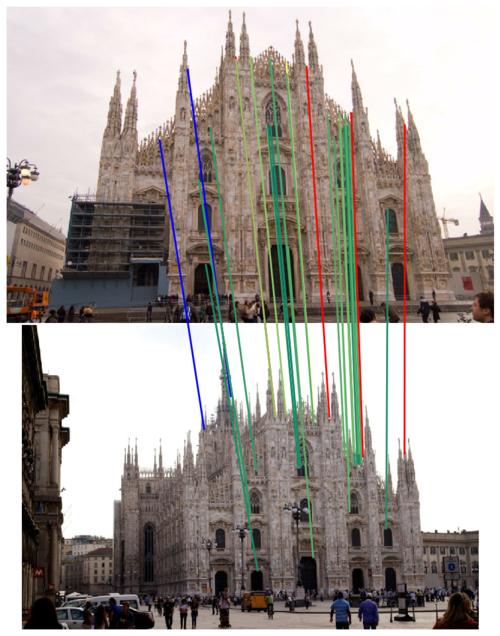
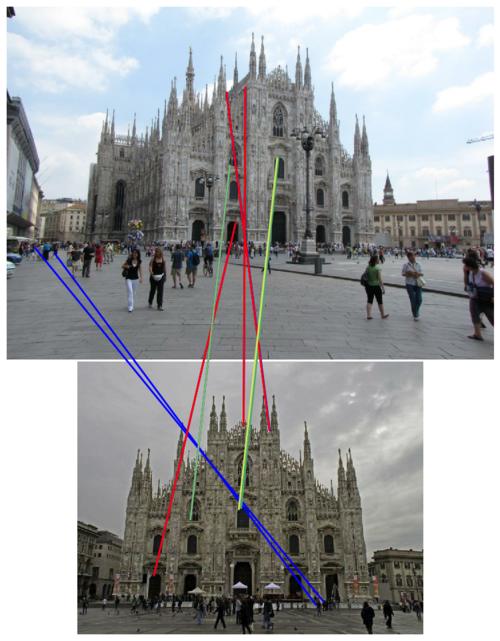
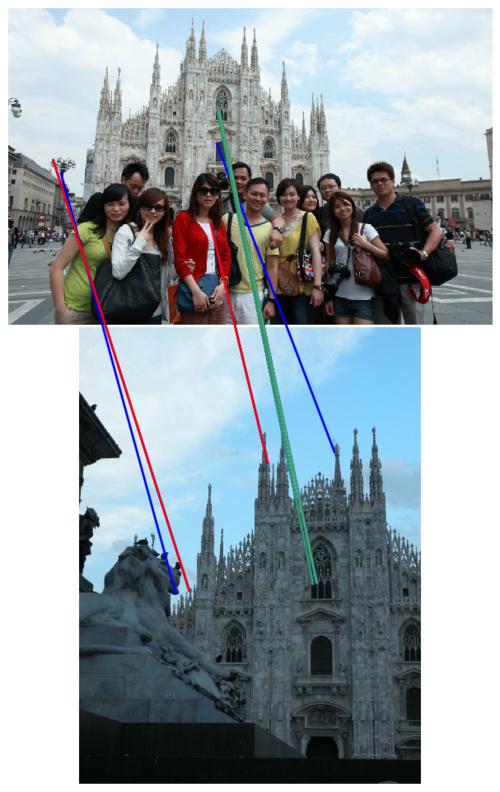
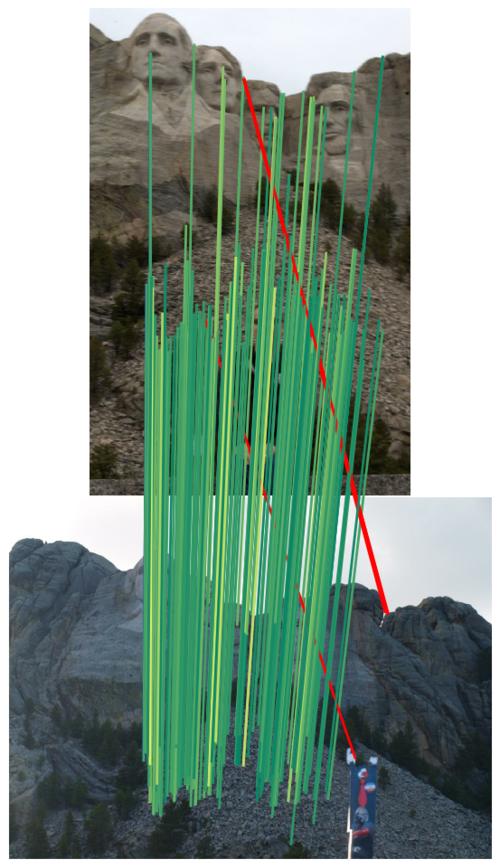
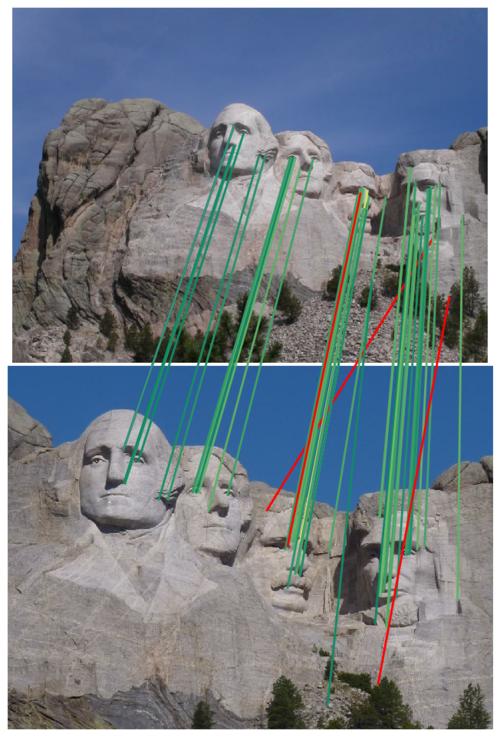
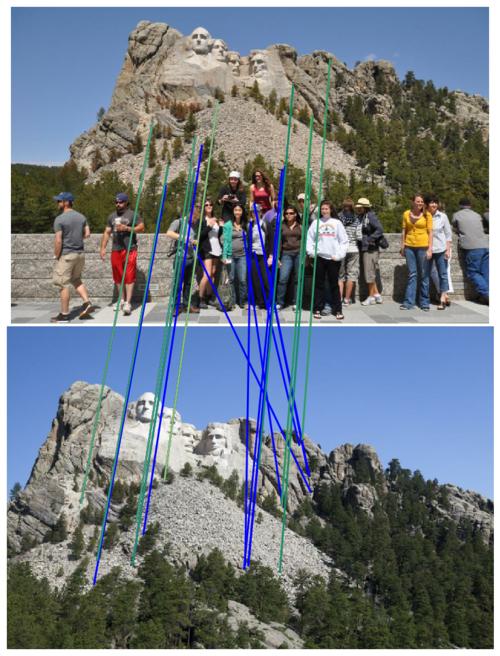
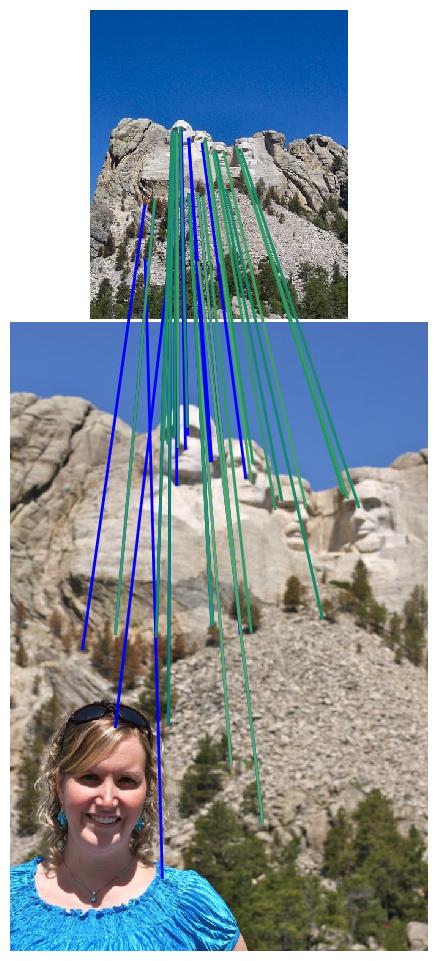
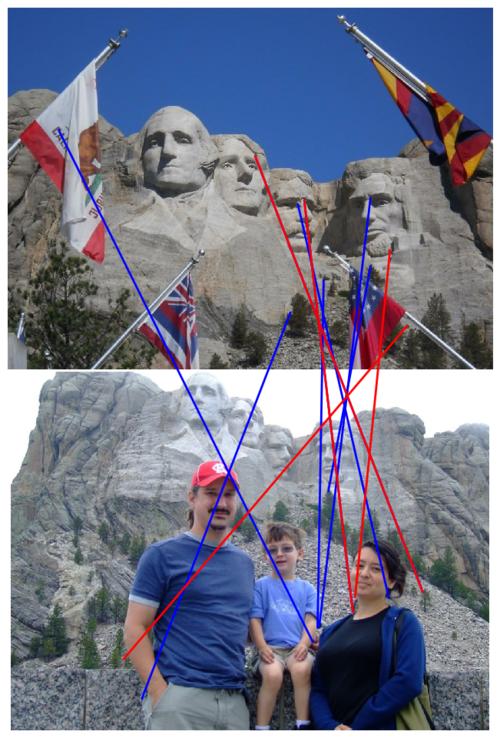
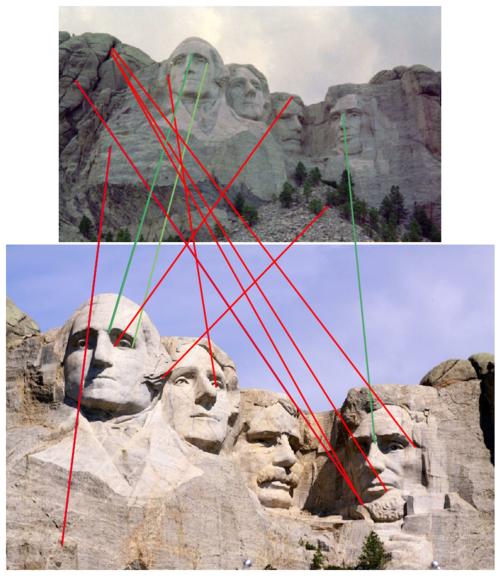
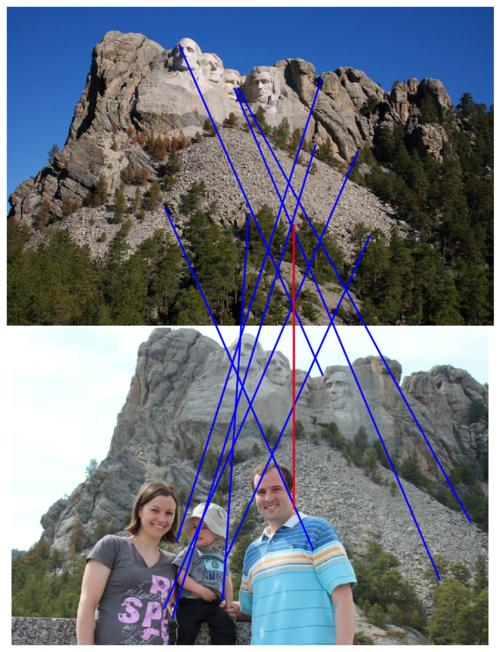
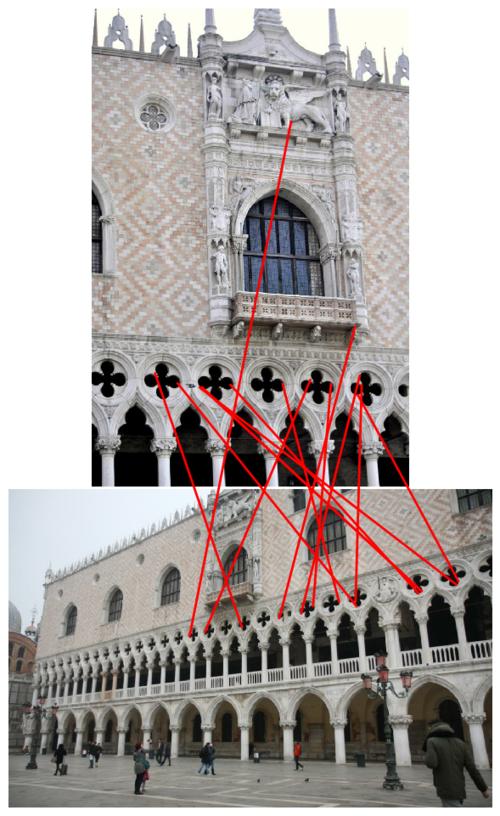
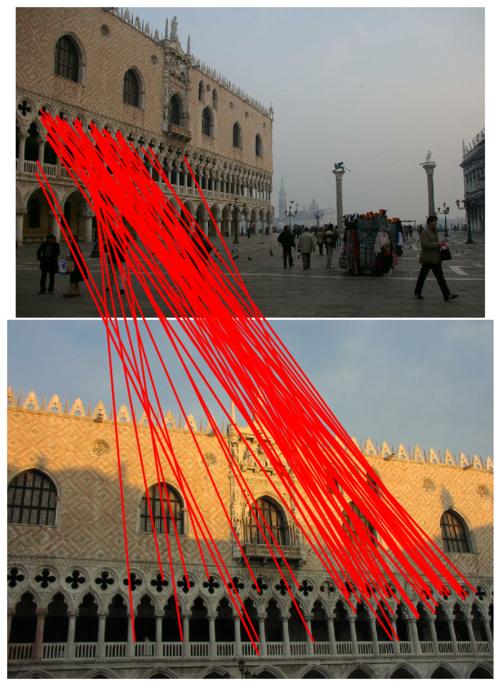
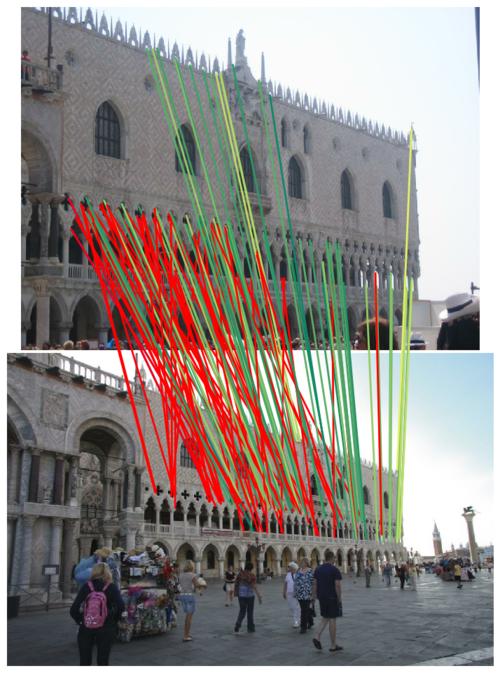
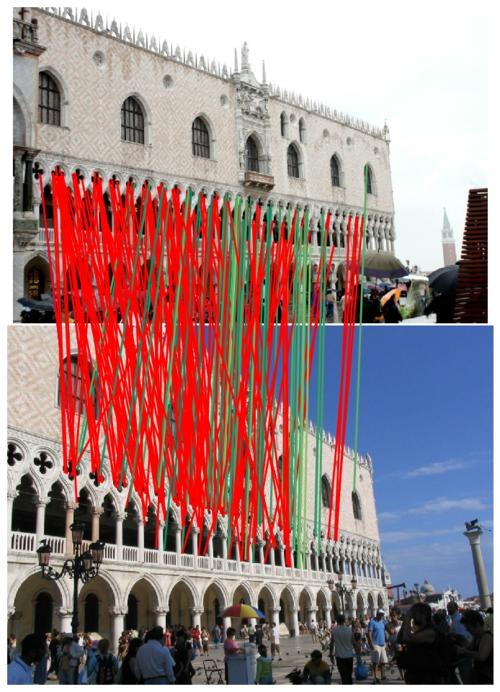
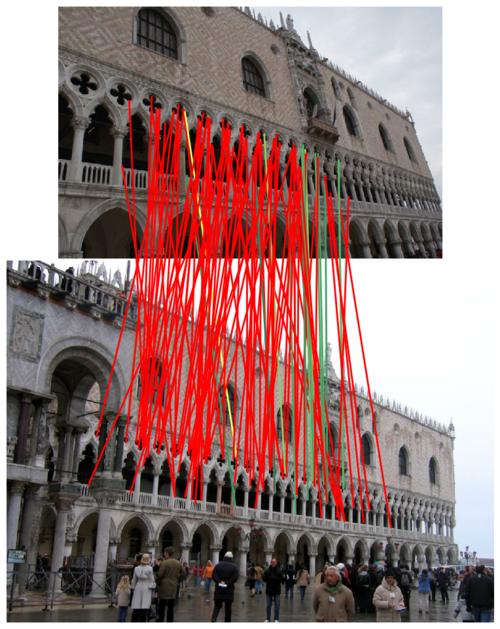
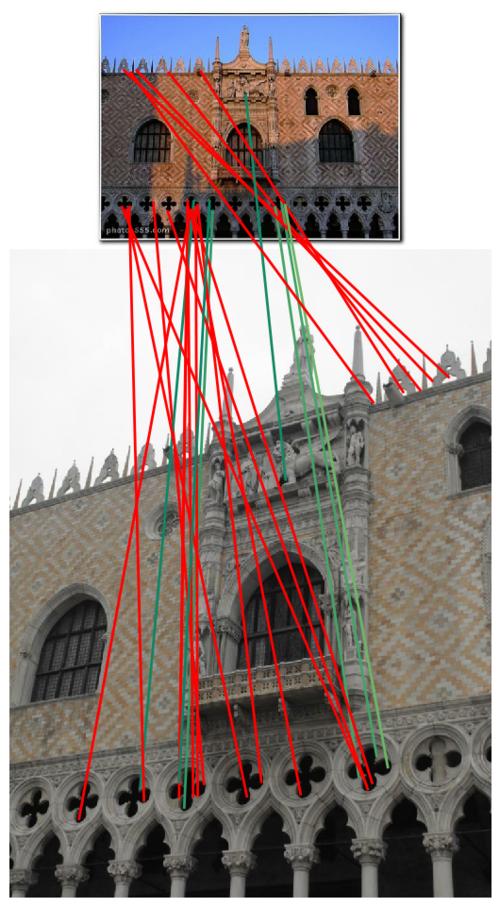
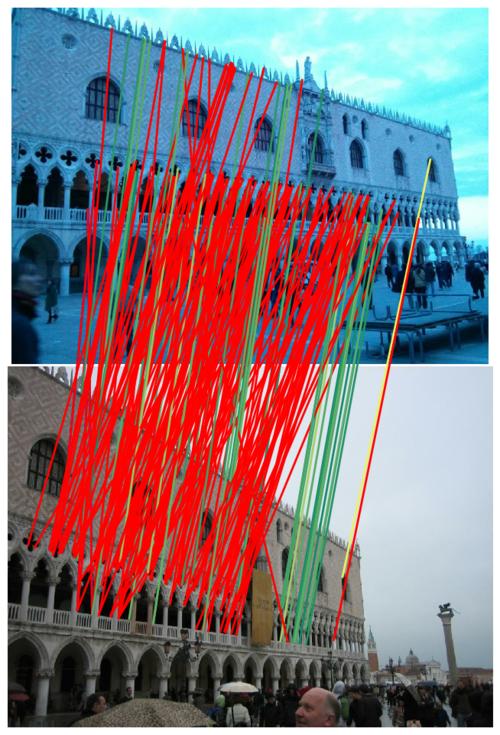
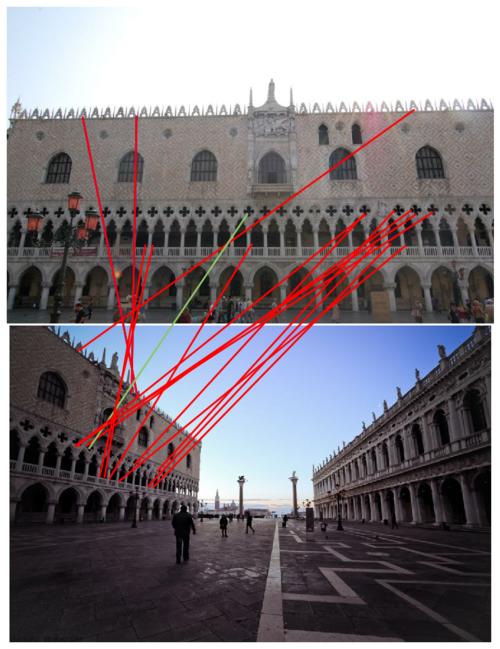
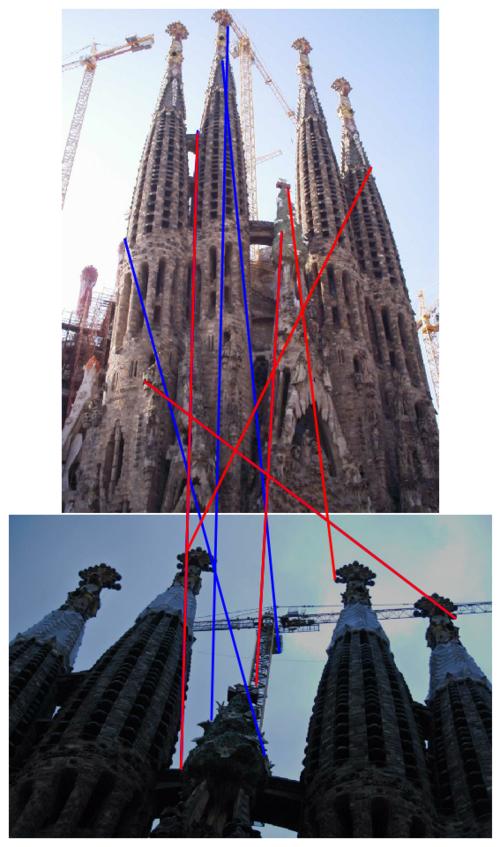
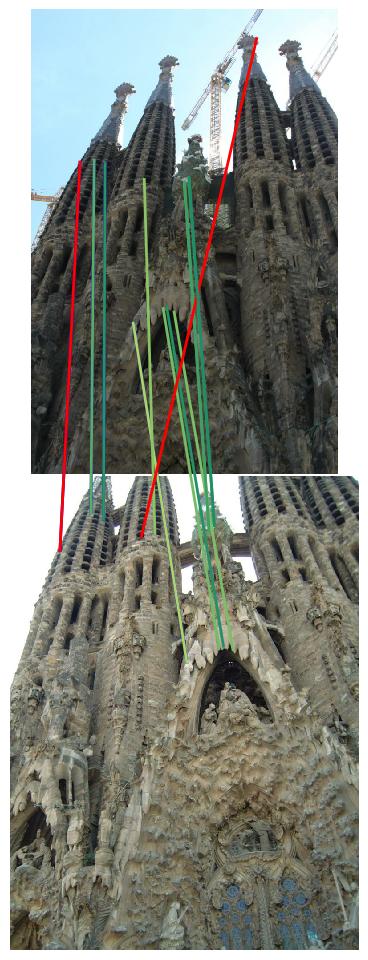
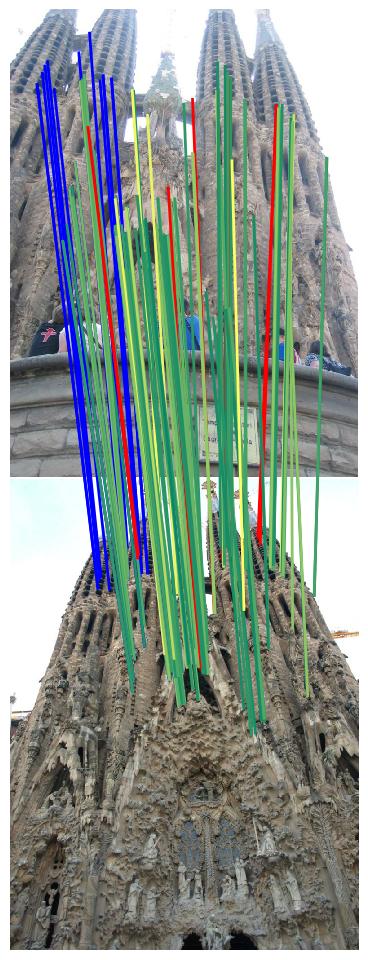
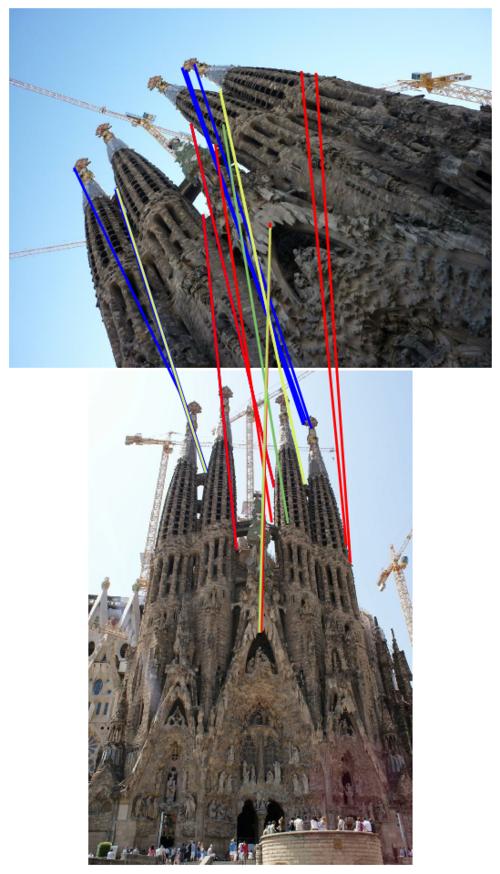
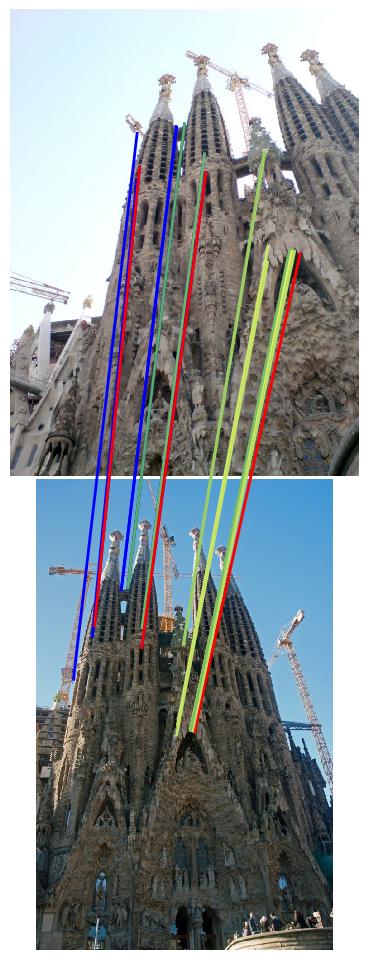
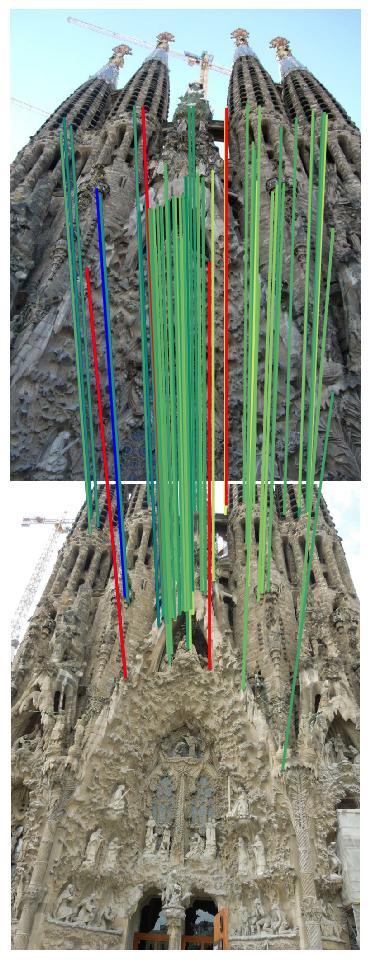
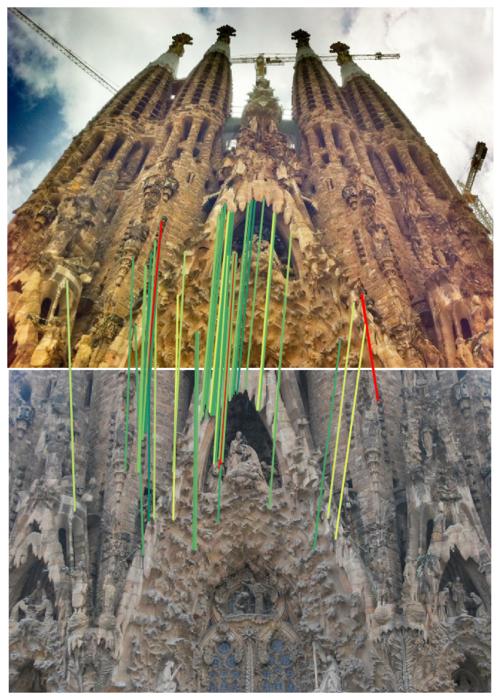
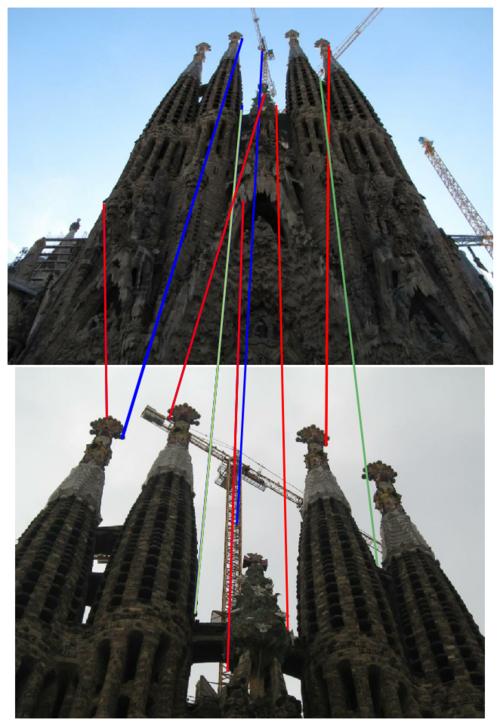
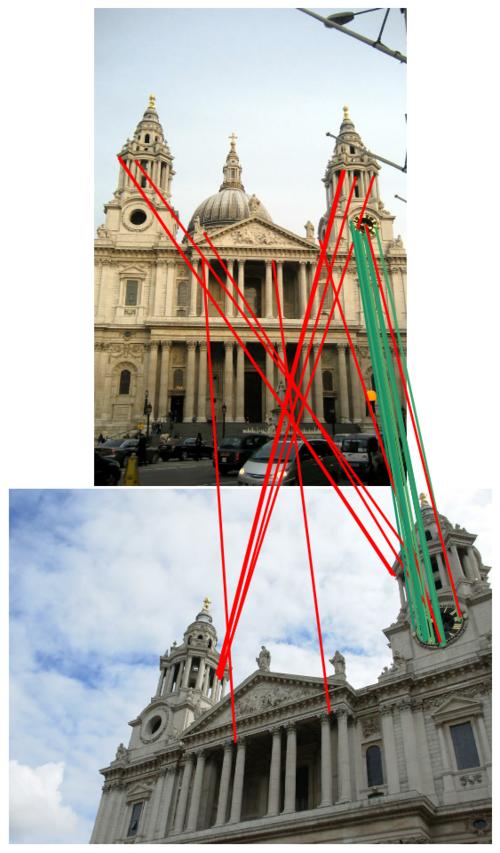
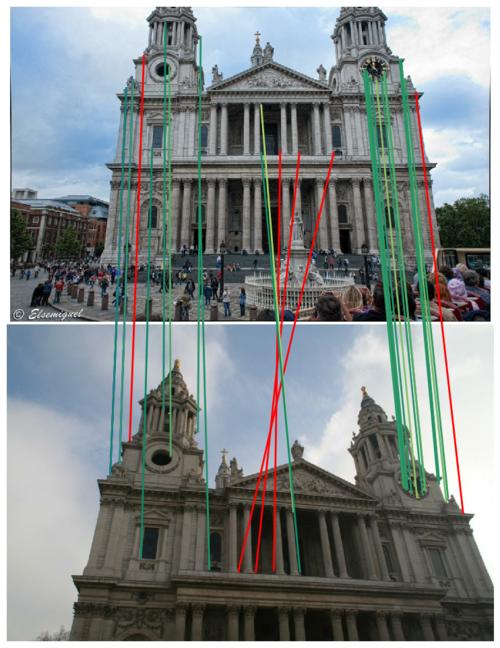
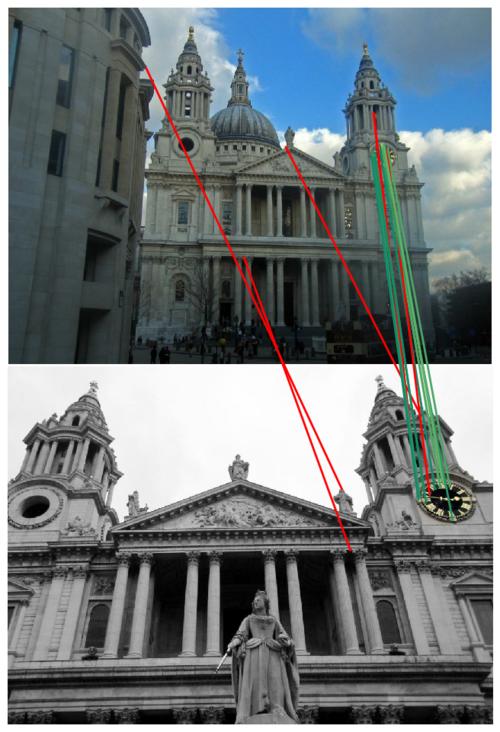
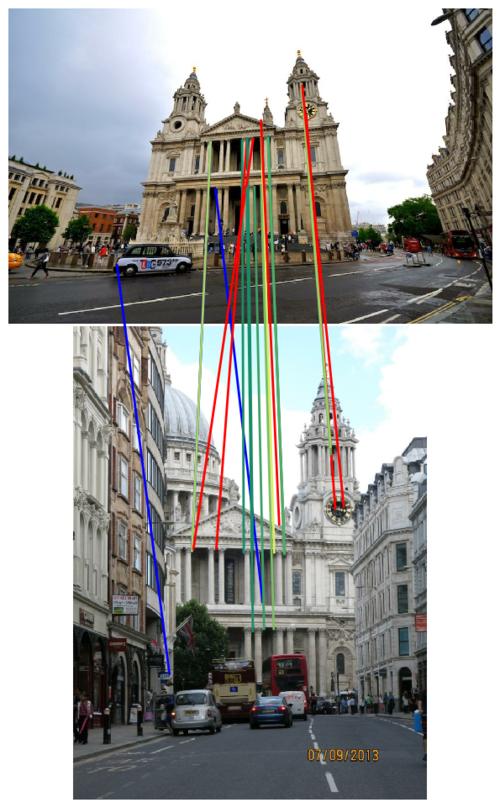
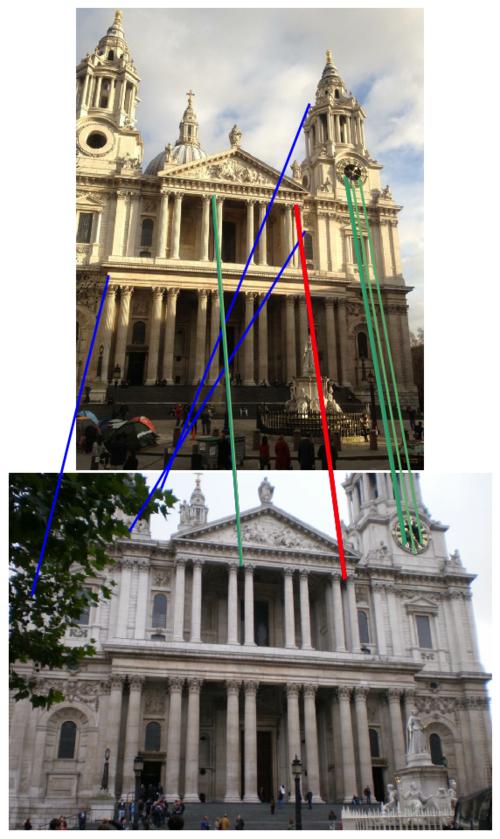
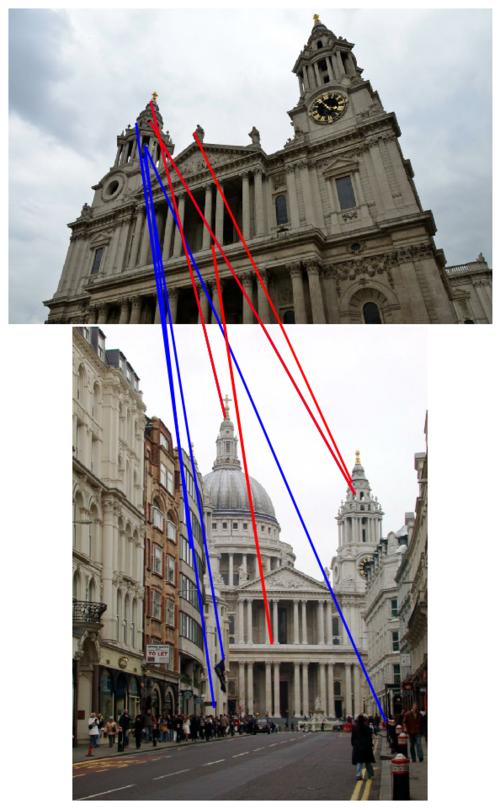
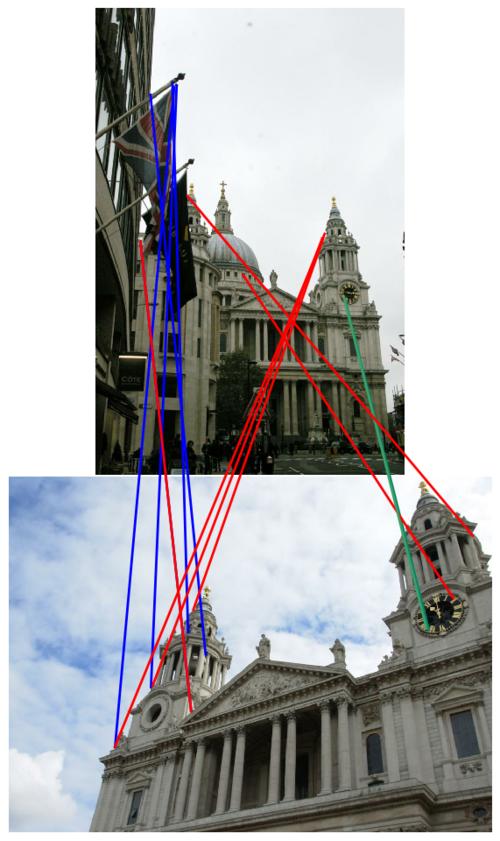
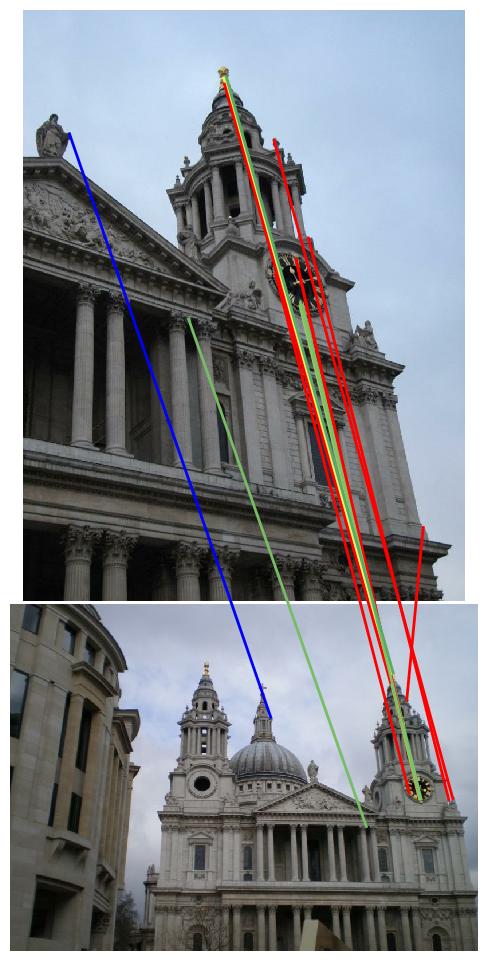
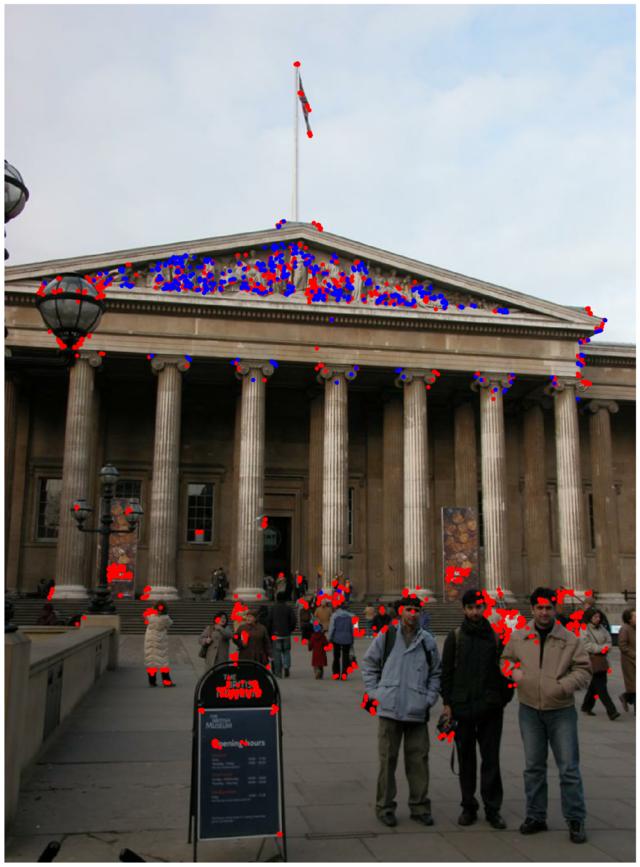
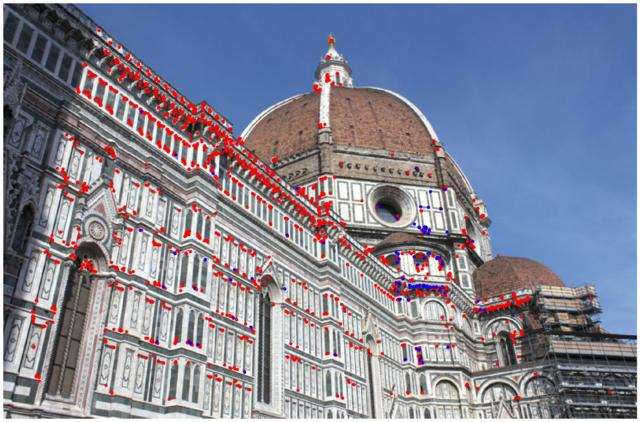
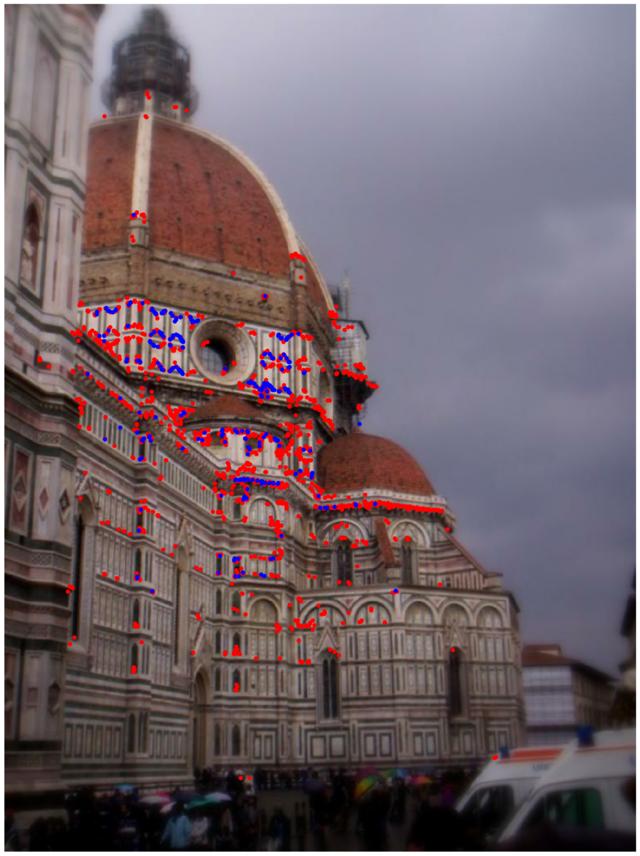
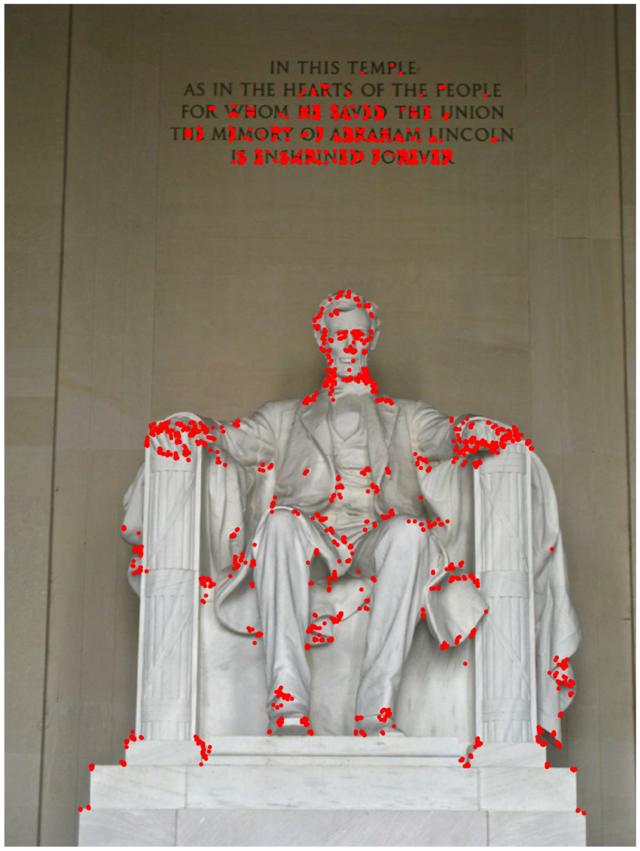
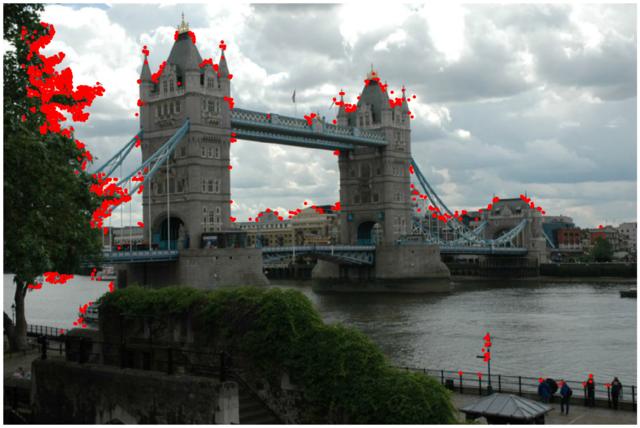
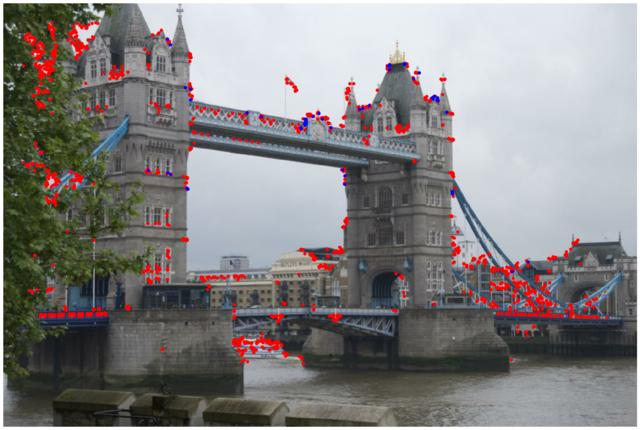
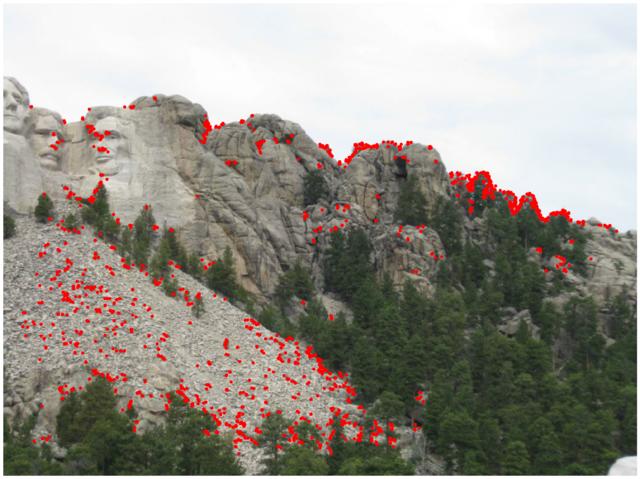
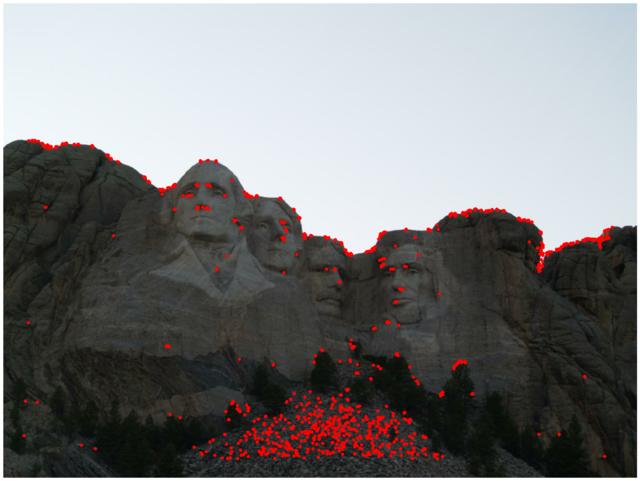
We show the inliers that survive the robust estimation loop (i.e. RANSAC), or those supplied with the submission if using custom matches, and use the depth estimates to determine whether they are correct. We draw matches above a 5-pixel error threshold in red, and those below are color-coded by their error, from 0 (green) to 5 pixels (yellow). Matches for which we do not have depth estimates are drawn in blue. Please note that the depth maps are estimates and may contain errors.
— british museum —



— florence cathedral side —

— lincoln memorial statue —


— london bridge —






— milan cathedral —


— mount rushmore —

— piazza san marco —


— sagrada familia —

— saint paul's cathedral —


Phototourism / Multiview track
mAA at 10 degrees: 0.02318 (±0.00229 over 3 run(s) / ±0.03025 over 9 scenes)
Rank (per category): 108 (of 108)
| Scene | Features | Matches (input) |
RegistrationRatio (%) | Number of Landmarks |
Track Length | ATE | mAA(50) | mAA(100) |
| bm | 2047.8 | 141.68 | 74.59 Rank: 108/108 |
512.05 Rank: 108/108 |
3.281 Rank: 99/108 |
1.28271 Rank: 106/108 |
0.00312 (±0.00015) Rank: 108/108 |
0.01022 (±0.00021) Rank: 108/108 |
| fcs | 2046.3 | 116.60 | 38.91 Rank: 108/108 |
251.45 Rank: 108/108 |
2.182 Rank: 108/108 |
0.74732 Rank: 108/108 |
0.02334 (±0.00444) Rank: 107/108 |
0.03386 (±0.00611) Rank: 108/108 |
| lms | 1933.3 | 134.42 | 63.09 Rank: 108/108 |
597.80 Rank: 106/108 |
2.776 Rank: 102/108 |
1.06865 Rank: 108/108 |
0.06457 (±0.00733) Rank: 108/108 |
0.09723 (±0.01232) Rank: 108/108 |
| lb | 2045.0 | 115.29 | 42.59 Rank: 108/108 |
193.76 Rank: 108/108 |
2.295 Rank: 108/108 |
0.36009 Rank: 1/108 |
0.00615 (±0.00260) Rank: 108/108 |
0.01434 (±0.00574) Rank: 108/108 |
| mc | 2046.9 | 107.34 | 4.89 Rank: 108/108 |
49.78 Rank: 108/108 |
0.834 Rank: 108/108 |
0.32293 Rank: 1/108 |
0.00000 (±0.00000) Rank: 108/108 |
0.00000 (±0.00001) Rank: 108/108 |
| mr | 2034.2 | 119.55 | 42.28 Rank: 108/108 |
175.23 Rank: 108/108 |
2.646 Rank: 106/108 |
1.72413 Rank: 108/108 |
0.00162 (±0.00103) Rank: 108/108 |
0.00463 (±0.00194) Rank: 108/108 |
| psm | 2044.9 | 120.26 | 20.24 Rank: 108/108 |
271.87 Rank: 108/108 |
1.449 Rank: 108/108 |
0.87909 Rank: 93/108 |
0.00006 (±0.00003) Rank: 108/108 |
0.00022 (±0.00001) Rank: 108/108 |
| sf | 2043.6 | 120.92 | 51.73 Rank: 108/108 |
388.77 Rank: 108/108 |
2.679 Rank: 102/108 |
0.57634 Rank: 100/108 |
0.03254 (±0.00179) Rank: 107/108 |
0.04623 (±0.00362) Rank: 108/108 |
| spc | 2044.5 | 112.33 | 17.13 Rank: 108/108 |
82.68 Rank: 108/108 |
1.575 Rank: 108/108 |
0.80343 Rank: 95/108 |
0.00101 (±0.00120) Rank: 108/108 |
0.00189 (±0.00190) Rank: 108/108 |
| avg | 2031.8 | 120.93 | 39.49 Rank: 108/108 |
280.38 Rank: 108/108 |
2.191 Rank: 108/108 |
0.86274 Rank: 101/108 |
0.01471 (±0.00151) Rank: 108/108 |
0.02318 (±0.00229) Rank: 108/108 |
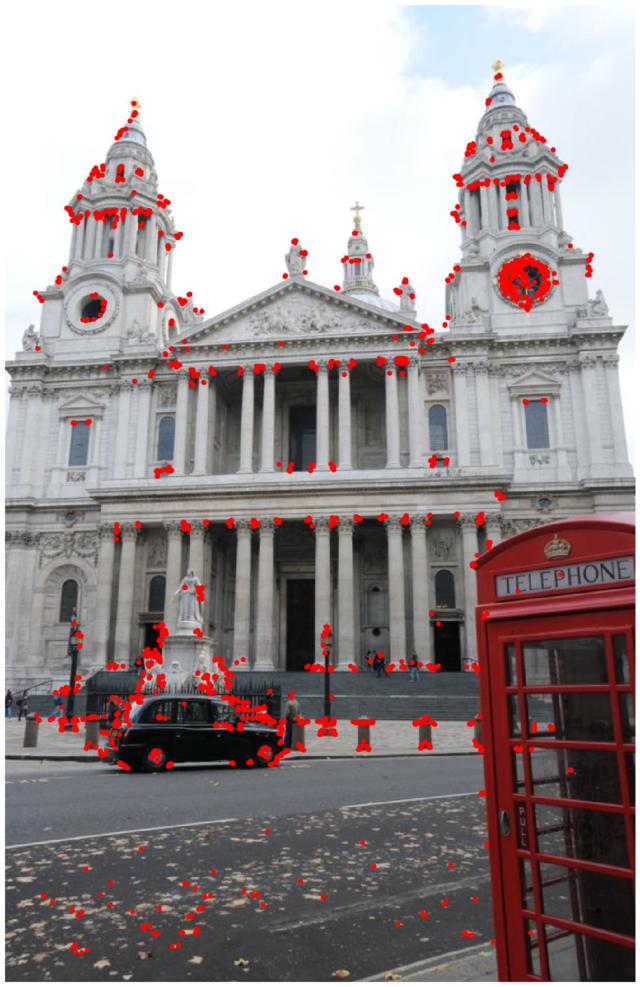
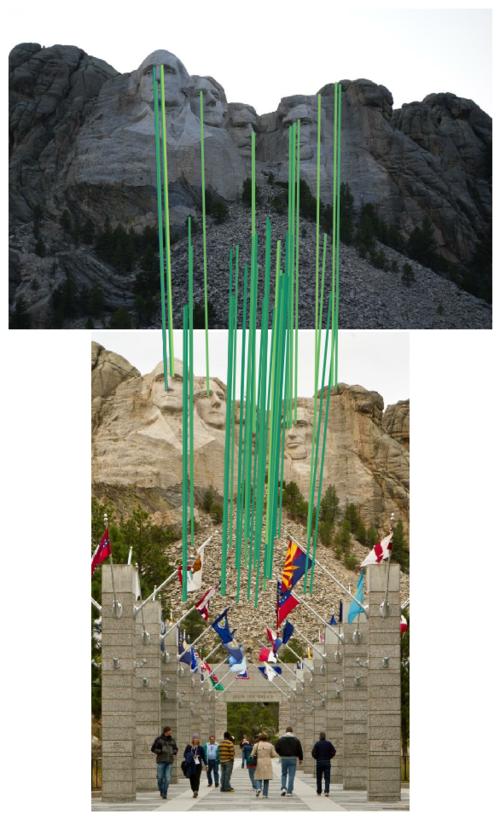
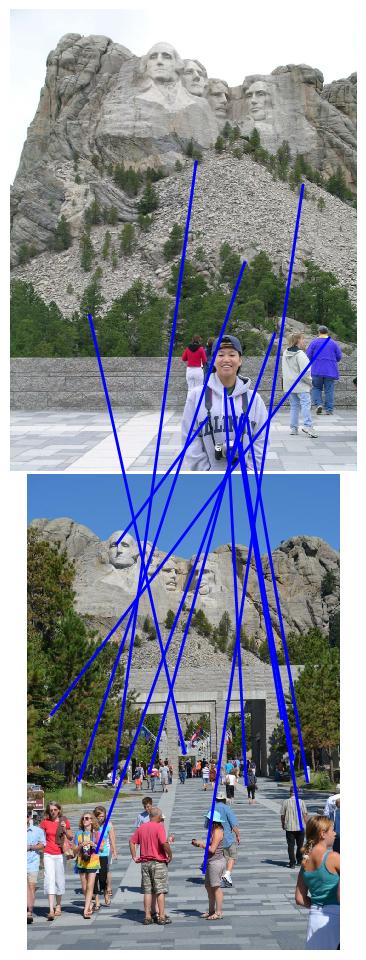
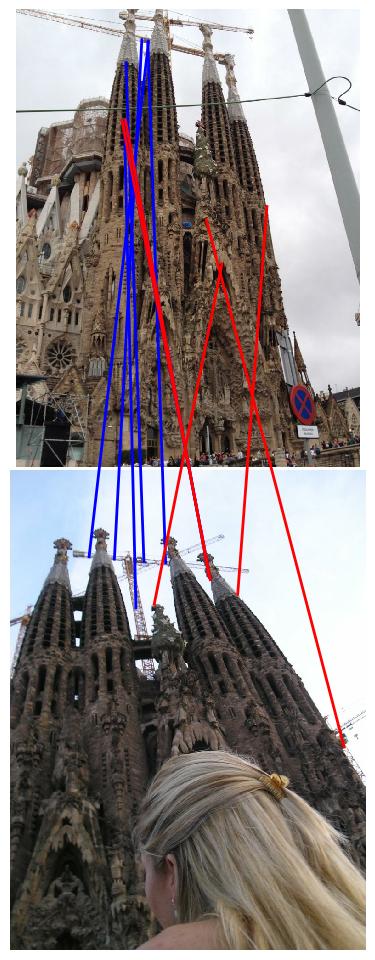
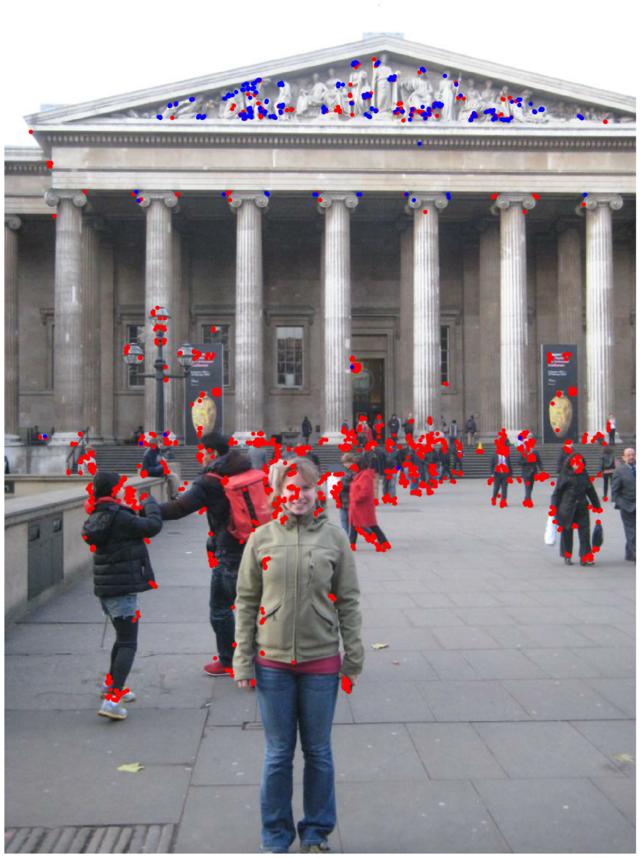
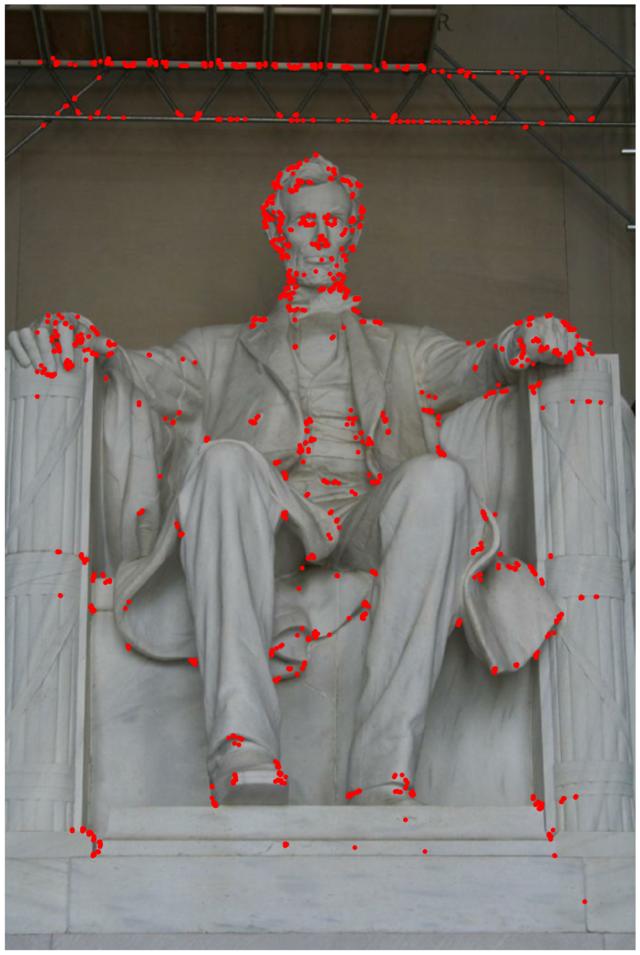
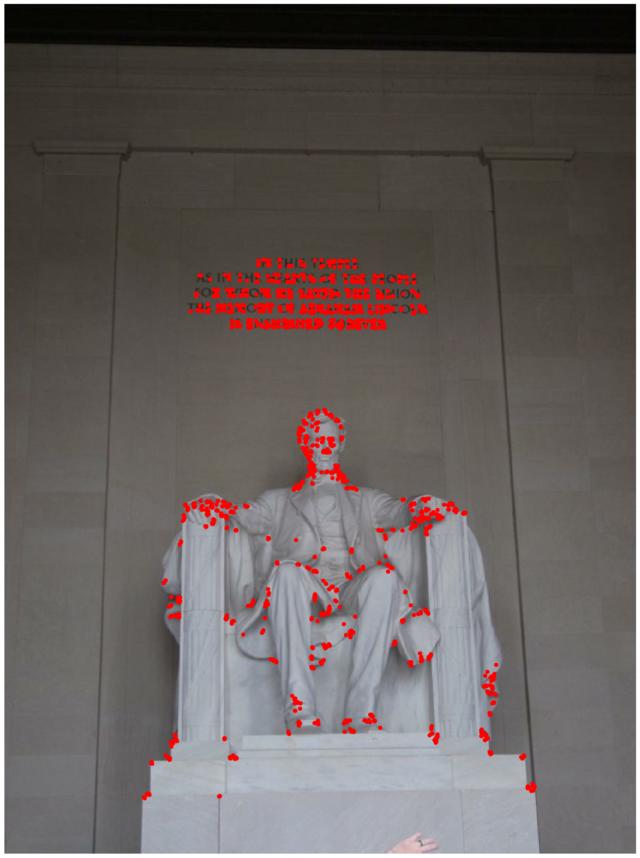
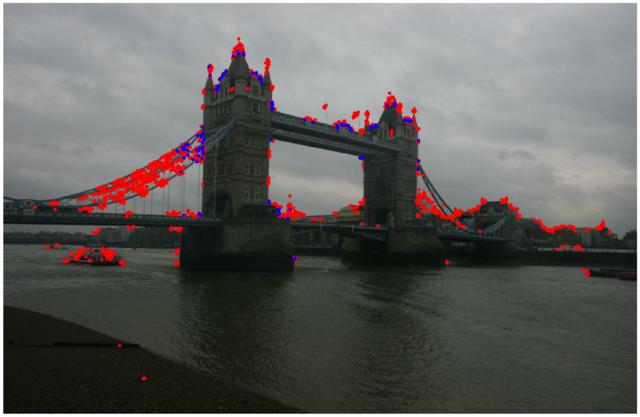
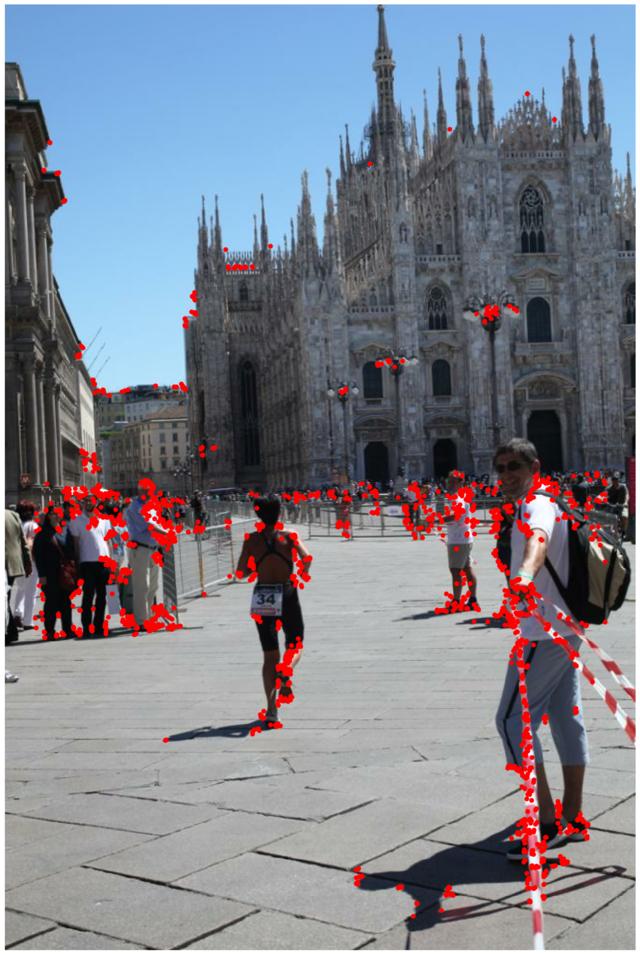
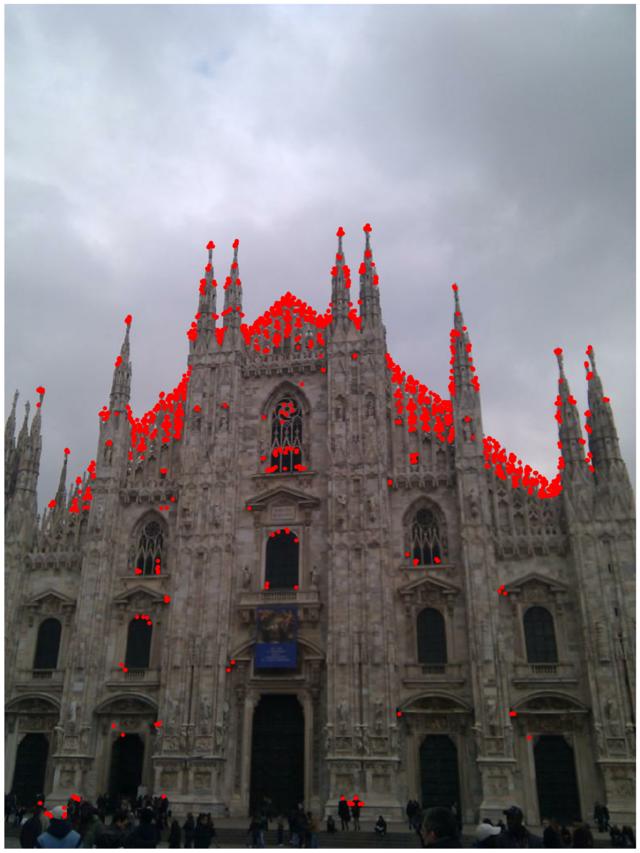
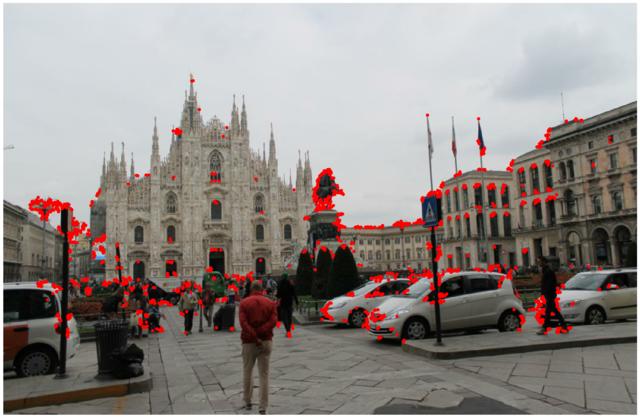
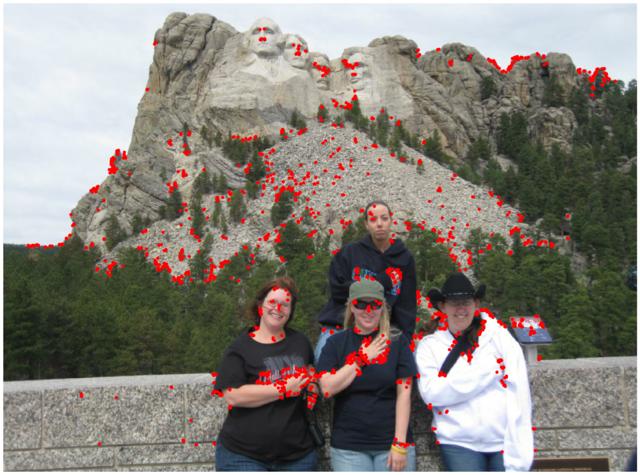
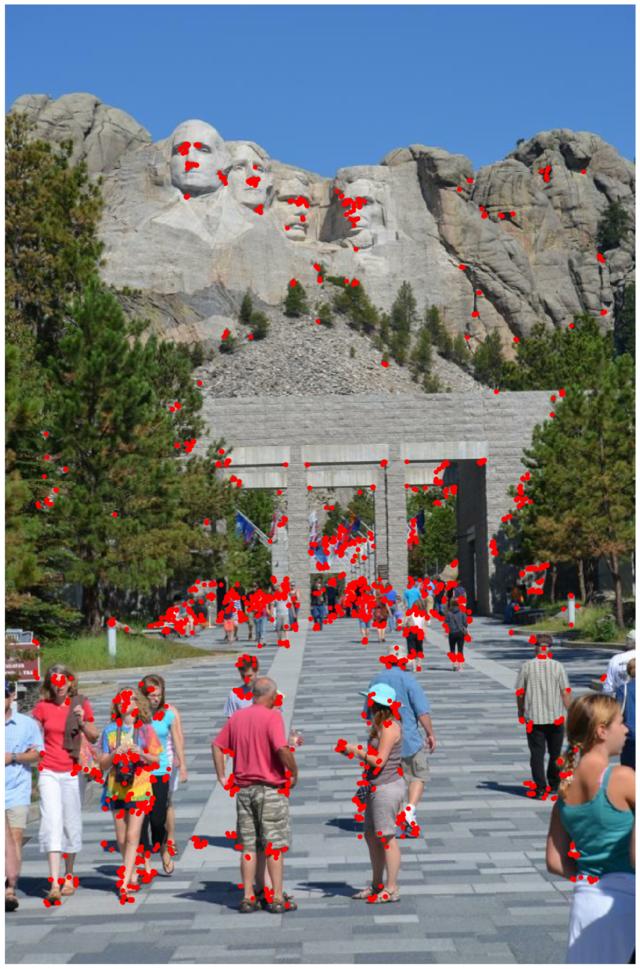
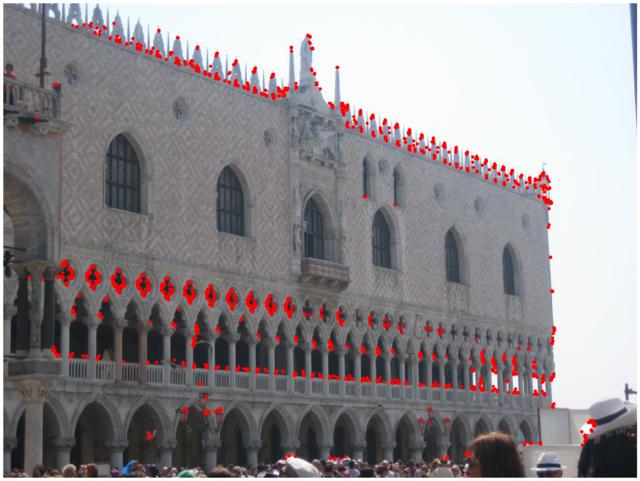
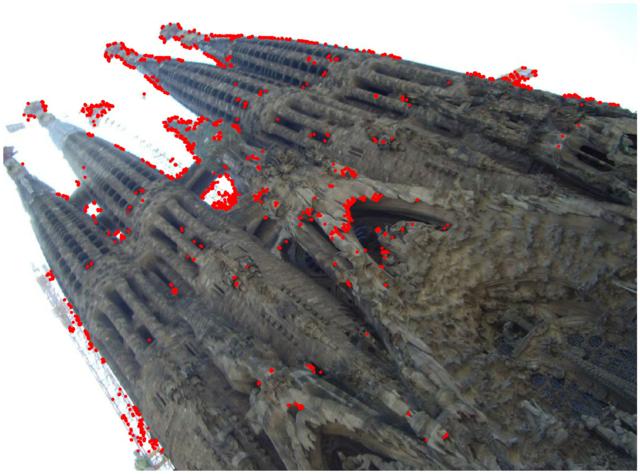
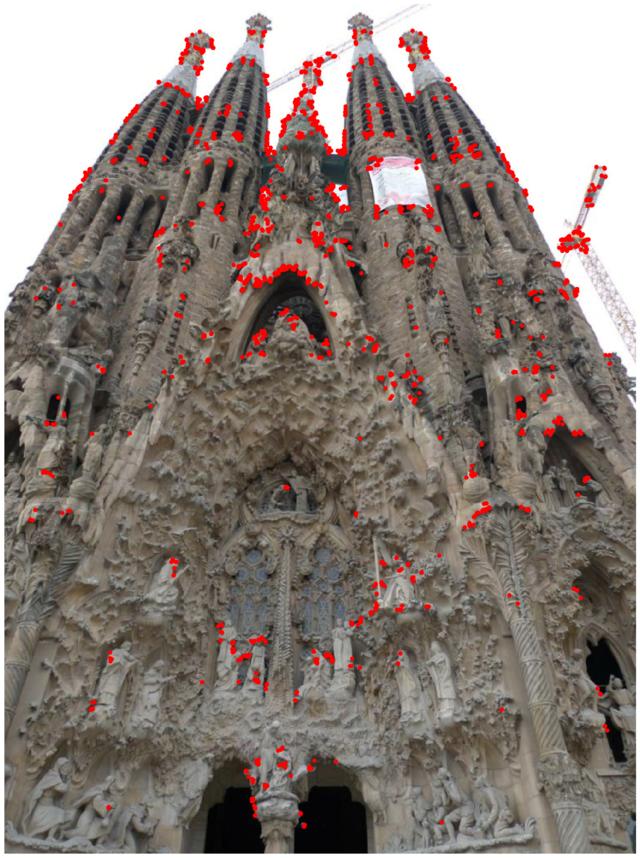
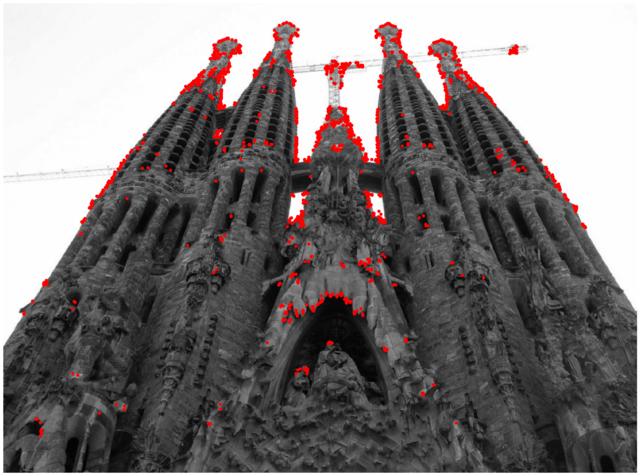
In the multi-view track we reconstruct the scene with Structure-from-Motion (Colmap) with small sets of images. We show the results for one bag of 25 images (displaying: 10). Keypoints are drawn in blue if they are part of the model, and in red otherwise.
— british museum —








— florence cathedral side —








— lincoln memorial statue —







— london bridge —







— milan cathedral —




— mount rushmore —


— piazza san marco —








— sagrada familia —






— saint paul's cathedral —