Submission ID: 00523
SEKD
Processed: 20-04-29. Download link: sid-00523-sekd-2k-both-degensac.json
This page ranks the submission against all others using the same number of keypoints, regardless of descriptor size. Please hover over table headers for descriptions on metrics and full scene names.
Metadata
- Authors: Yafei Song, Ling Cai, Mingyang Li (contact)
- Keypoint: sekd
- Descriptor: sekd (128 float32: 512 bytes)
- Number of features: 2048
- Summary: Our method named SEKD: Self-Evolving Keypoint Detection and Description, where the SEKD model is trained using COCO test images. In this submission each image has up to 2048 SEKD keypoints, and 128-dim float descriptor. We use the built-in matcher (bidirectional filter with the both strategy, optimal inlier and ratio test thresholds) with DEGENSAC.
- Paper: N/A
- Website: N/A
- Origin: Submission
- Flags: is_submission, is_challenge_2020
Phototourism / Stereo track
mAA at 10 degrees: 0.42811 (±0.00096 over 3 run(s) / ±0.14127 over 9 scenes)
Rank (per category): 40 (of 108)
| Scene | Features | Matches (matcher) |
Matches (filter) |
Matches (final) |
Rep. @ 3 px. | MS @ 3 px. | mAA(5o) | mAA(10o) |
| bm | 2048.0 | 208.2 | 208.2 | 116.1 | 0.495 Rank: 22/108 |
0.928 Rank: 43/108 |
0.22010 (±0.00229) Rank: 22/108 |
0.33753 (±0.00163) Rank: 26/108 |
| fcs | 2043.4 | 220.8 | 220.8 | 129.7 | 0.369 Rank: 35/108 |
0.901 Rank: 16/108 |
0.52744 (±0.00049) Rank: 30/108 |
0.66131 (±0.00128) Rank: 24/108 |
| lms | 2045.1 | 305.9 | 305.9 | 191.3 | 0.396 Rank: 15/108 |
0.702 Rank: 33/108 |
0.47804 (±0.00173) Rank: 23/108 |
0.59780 (±0.00060) Rank: 24/108 |
| lb | 2047.2 | 185.7 | 185.7 | 94.5 | 0.366 Rank: 25/108 |
0.725 Rank: 13/108 |
0.30954 (±0.00229) Rank: 22/108 |
0.41257 (±0.00273) Rank: 46/108 |
| mc | 2043.6 | 188.1 | 188.1 | 105.3 | 0.413 Rank: 25/108 |
0.900 Rank: 46/108 |
0.24397 (±0.00229) Rank: 22/108 |
0.38036 (±0.00285) Rank: 61/108 |
| mr | 2045.2 | 208.1 | 208.1 | 122.9 | 0.368 Rank: 40/108 |
0.907 Rank: 51/108 |
0.21493 (±0.00244) Rank: 44/108 |
0.30470 (±0.00240) Rank: 53/108 |
| psm | 2037.9 | 110.9 | 110.9 | 56.5 | 0.332 Rank: 24/108 |
0.482 Rank: 36/108 |
0.09682 (±0.00068) Rank: 47/108 |
0.18428 (±0.00024) Rank: 48/108 |
| sf | 2046.1 | 243.5 | 243.5 | 143.2 | 0.351 Rank: 36/108 |
0.840 Rank: 17/108 |
0.38956 (±0.00389) Rank: 26/108 |
0.53216 (±0.00305) Rank: 22/108 |
| spc | 2034.6 | 183.4 | 183.4 | 91.8 | 0.383 Rank: 24/108 |
0.809 Rank: 52/108 |
0.29902 (±0.00225) Rank: 67/108 |
0.44227 (±0.00301) Rank: 64/108 |
| avg | 2043.4 | 206.1 | 206.1 | 116.8 | 0.386 Rank: 26/108 |
0.799 Rank: 31/108 |
0.30882 (±0.00124) Rank: 39/108 |
0.42811 (±0.00096) Rank: 40/108 |
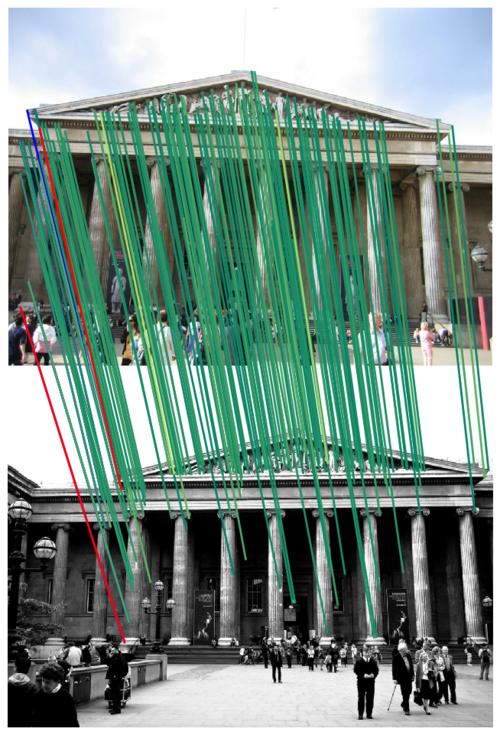
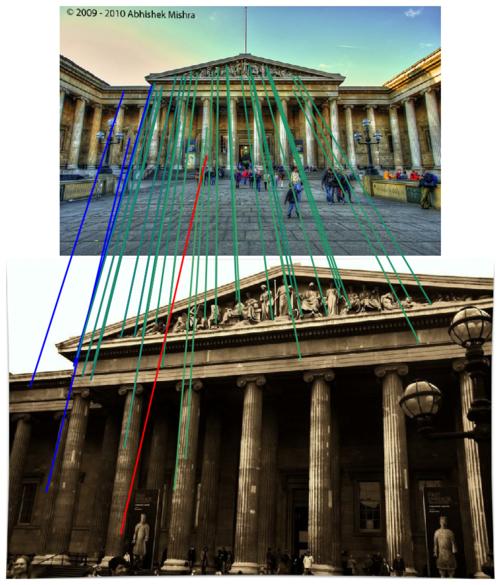
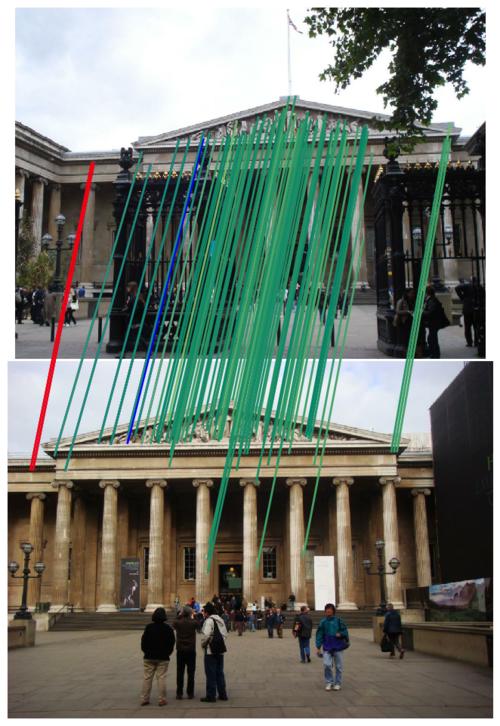
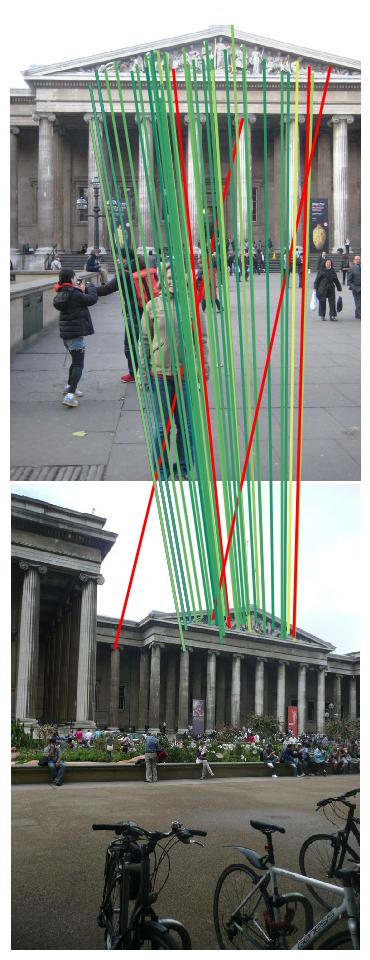
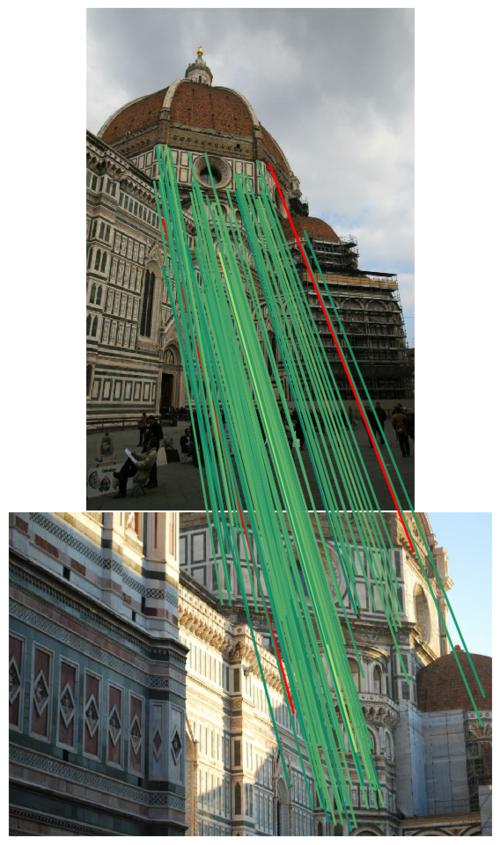
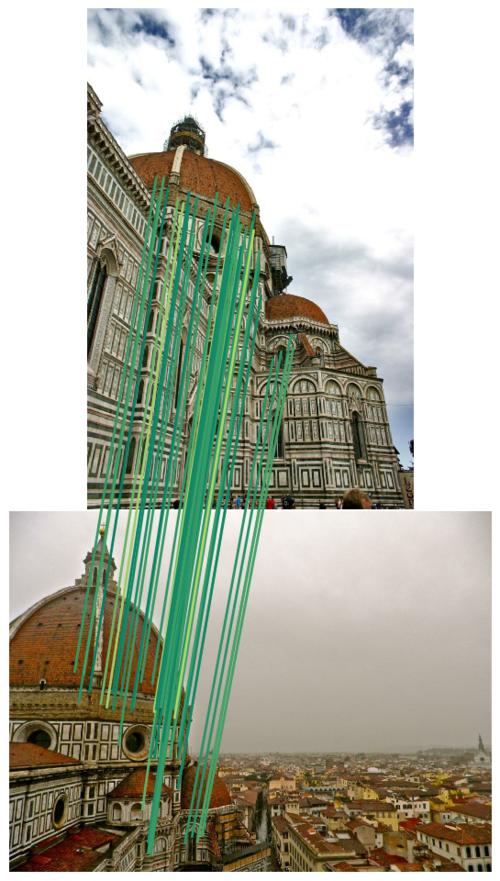
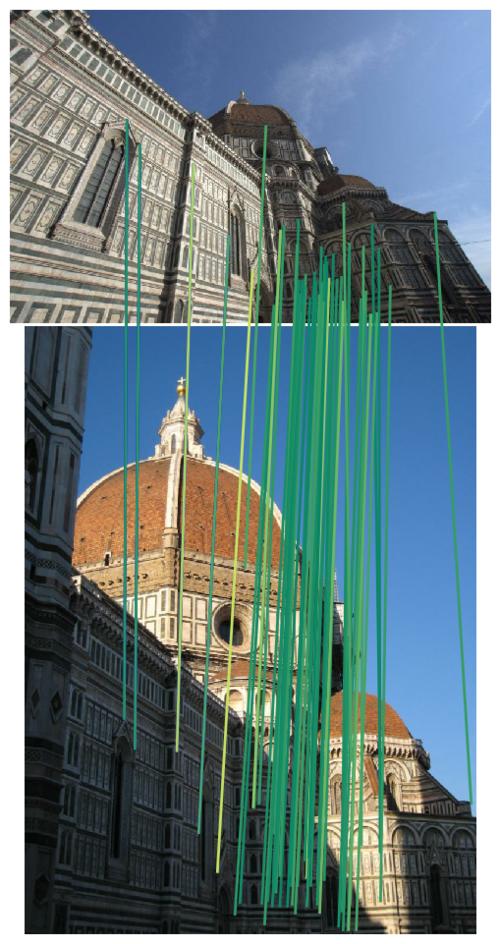
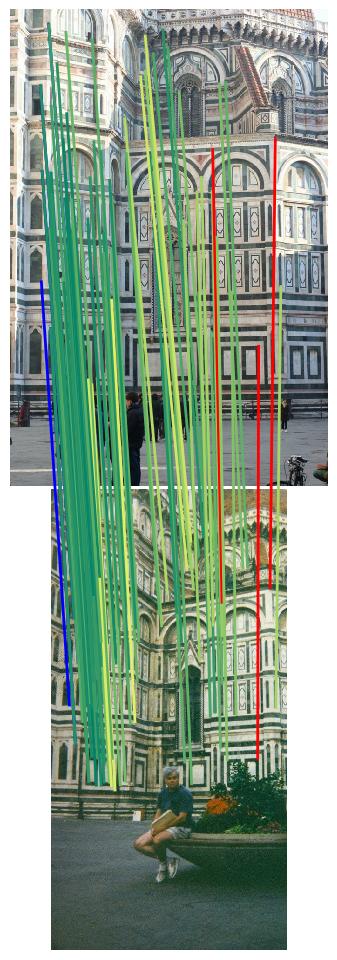
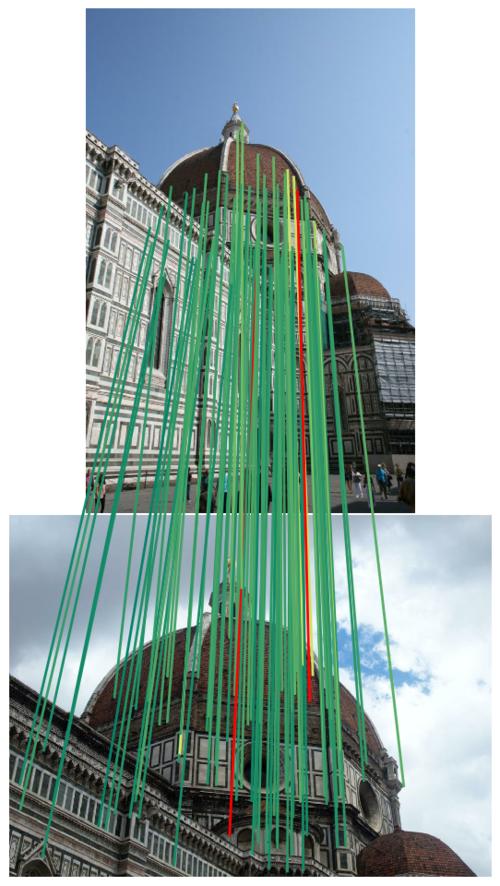
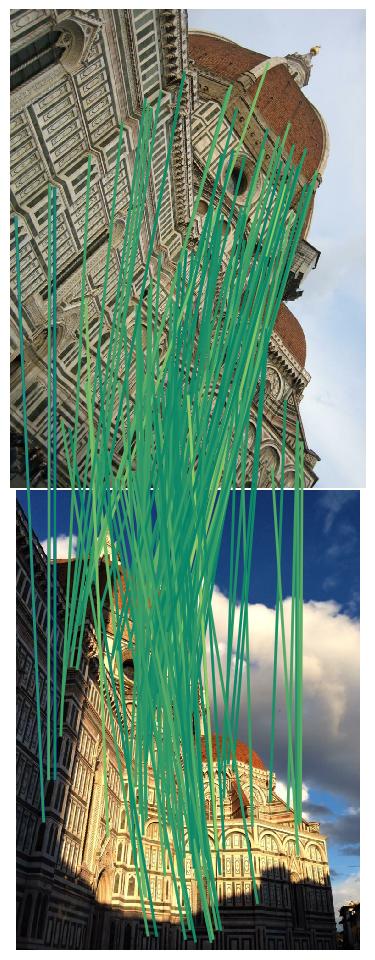
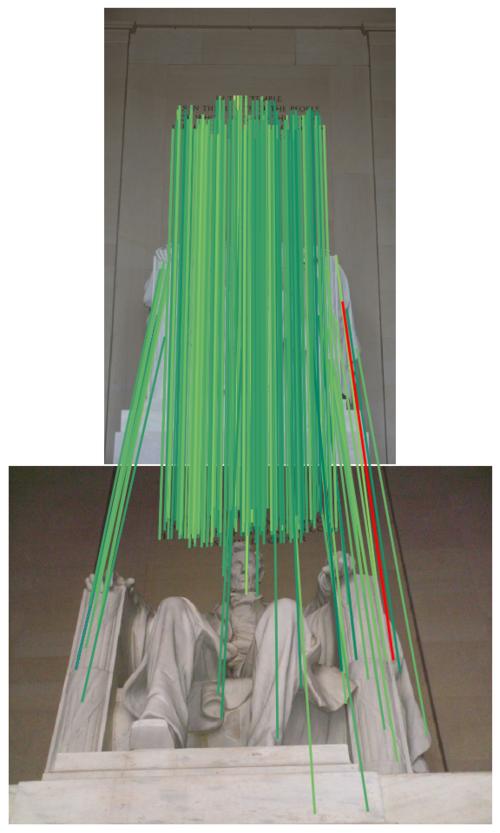
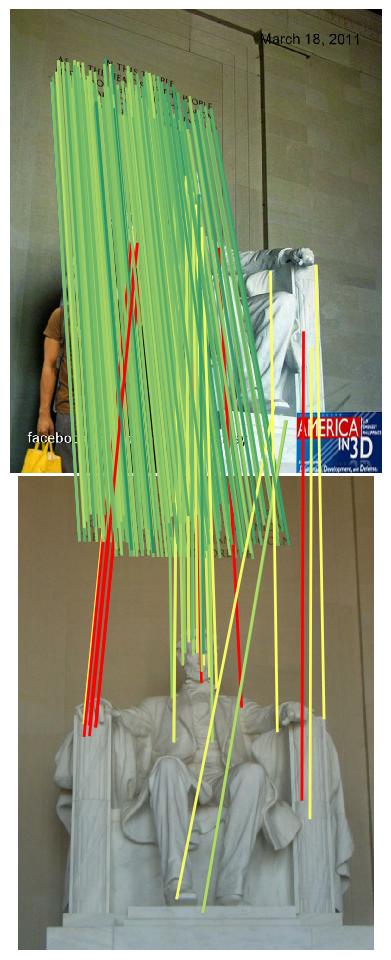
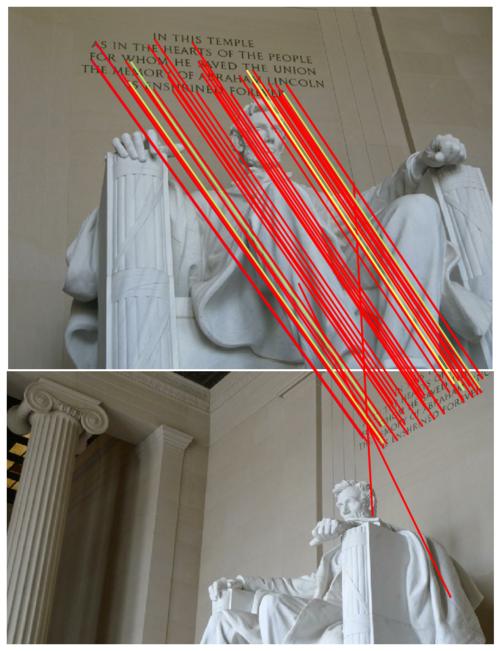
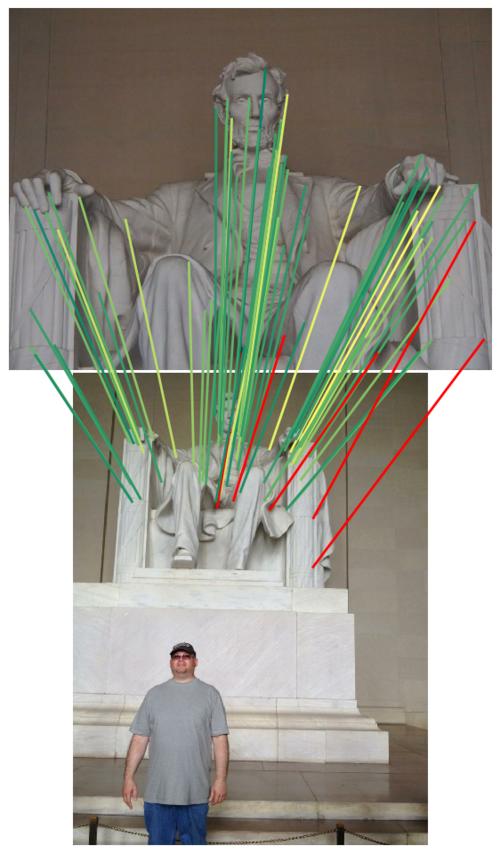
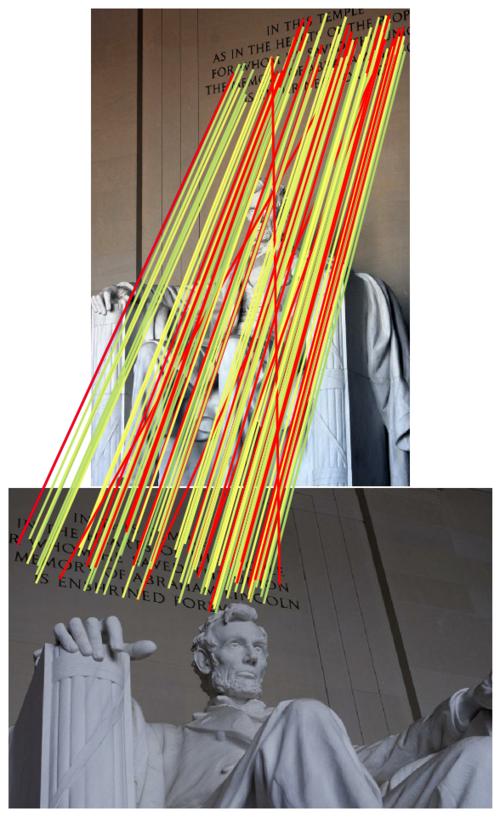
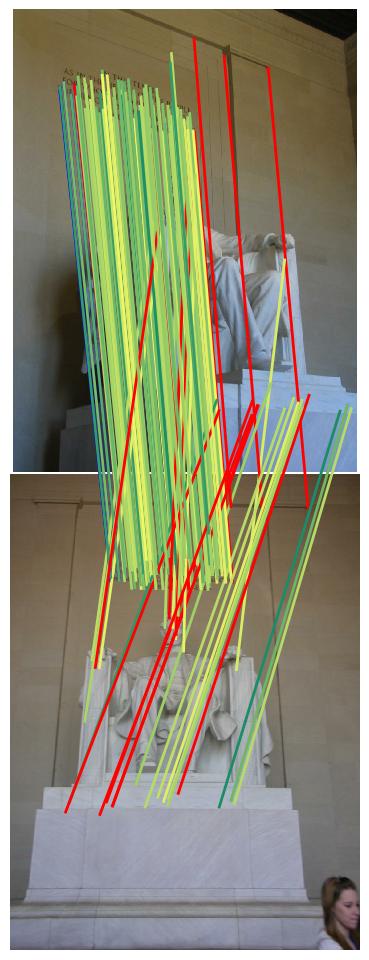
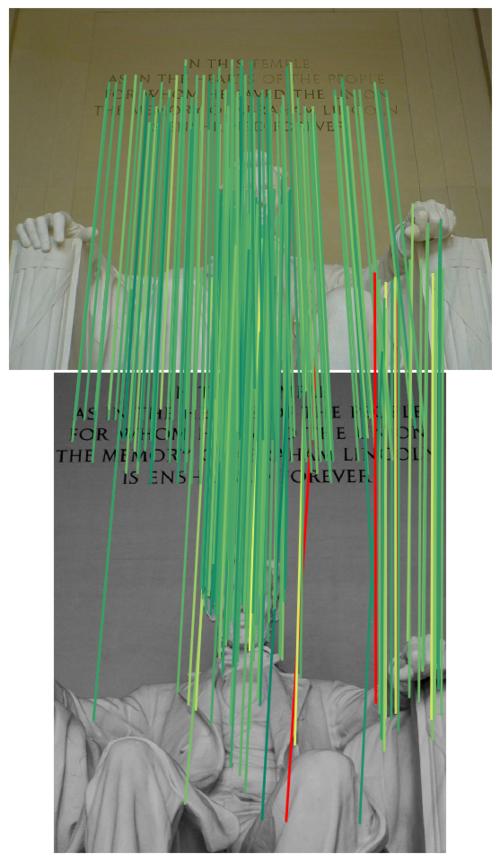
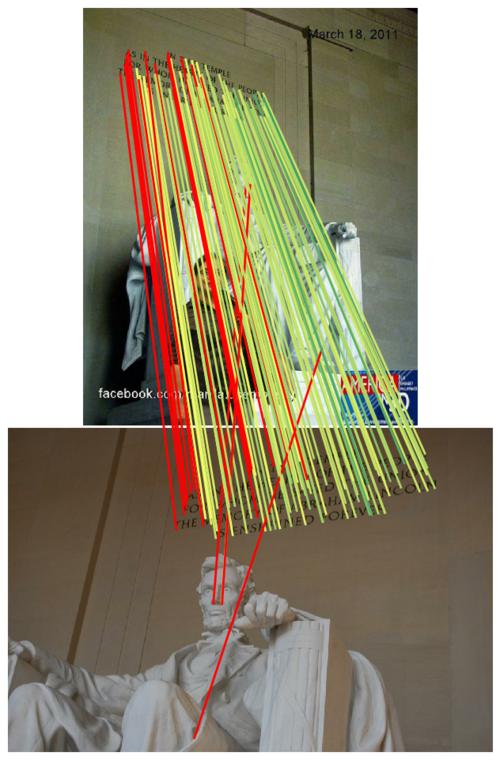
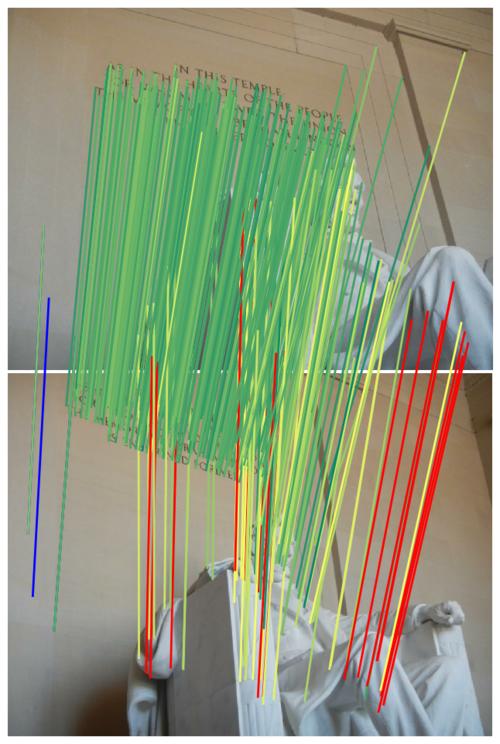
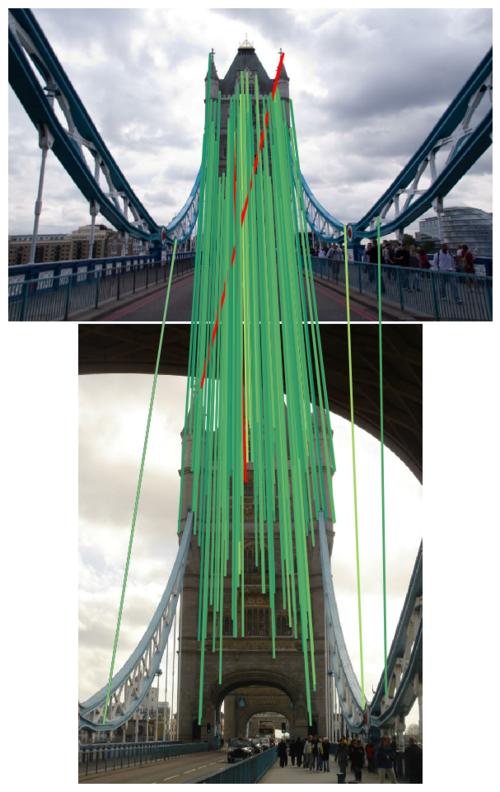
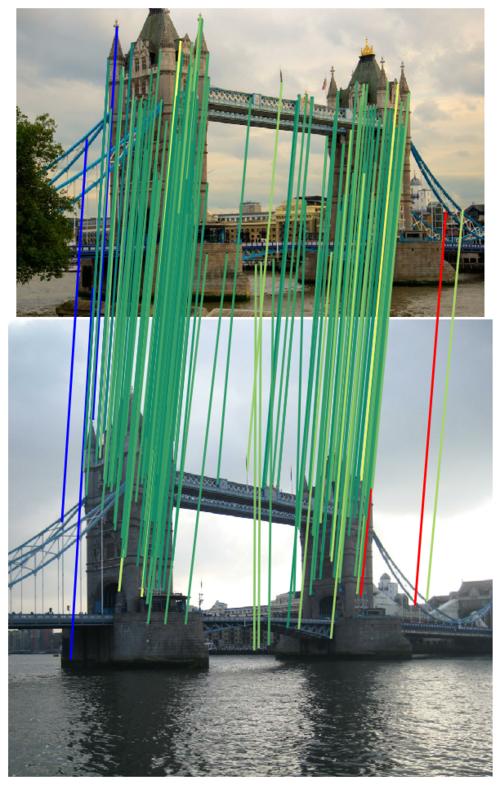
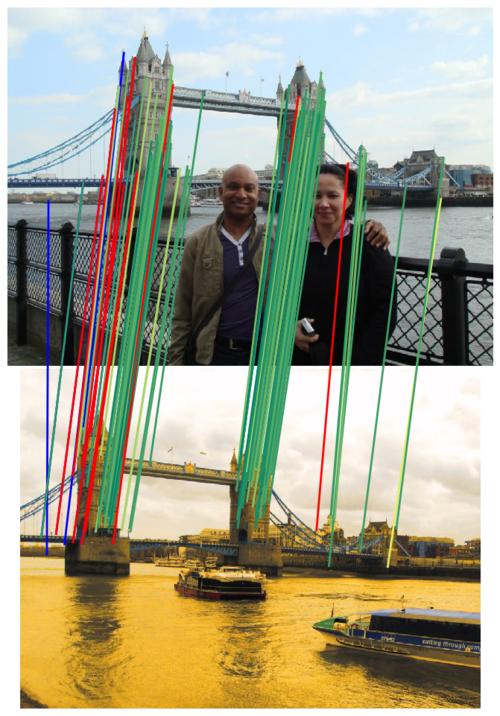
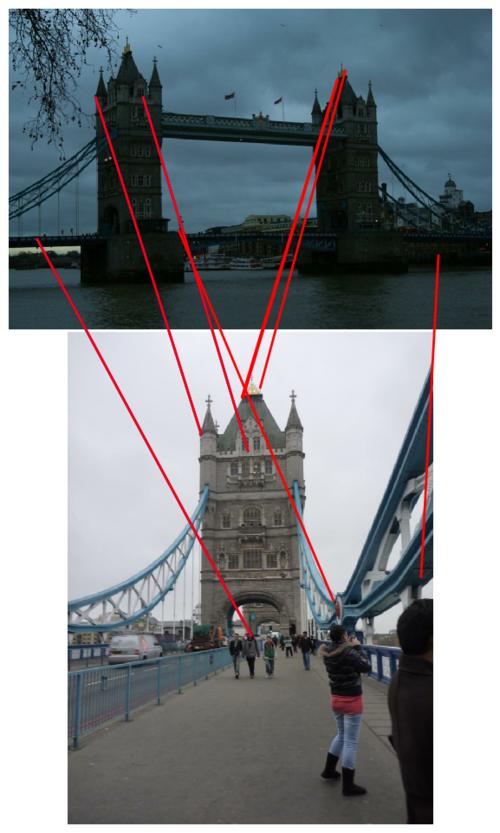
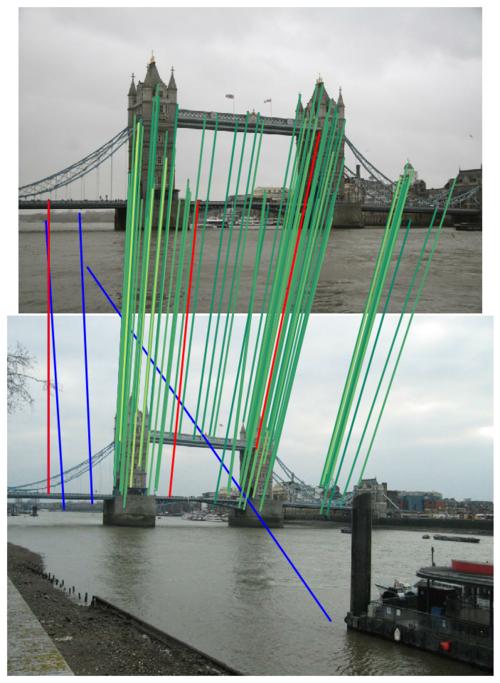
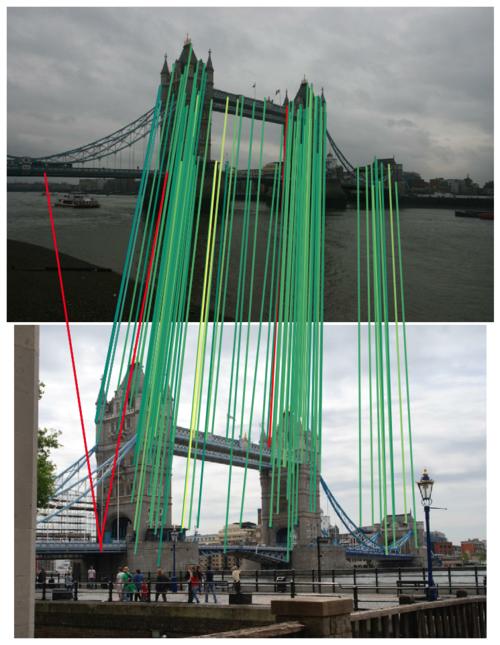
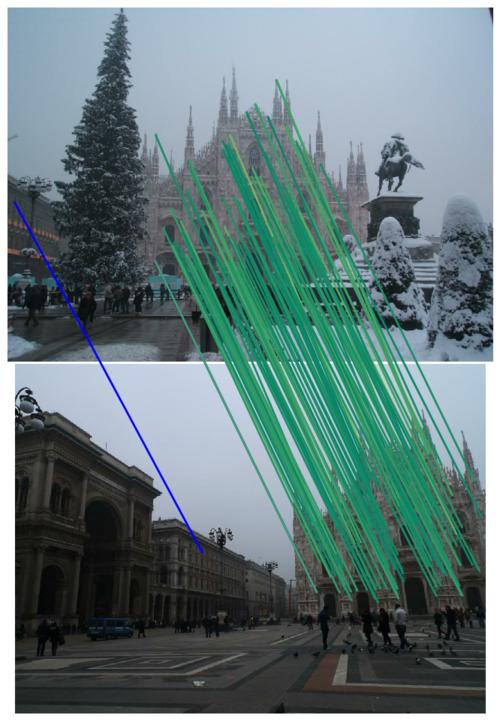
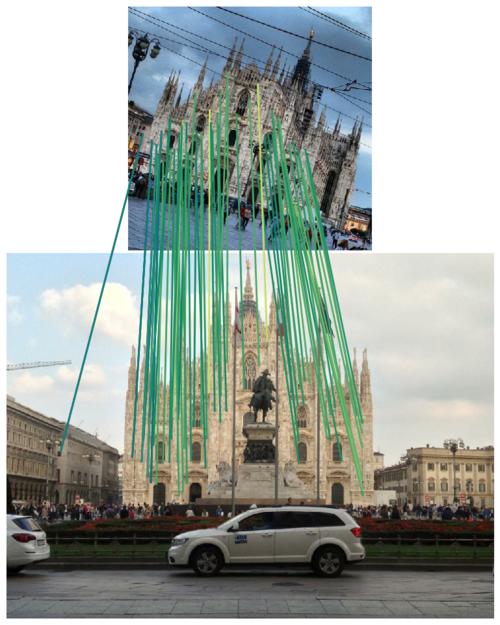
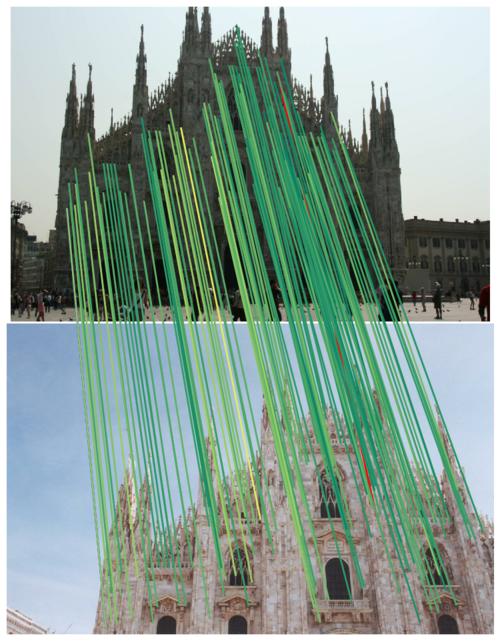
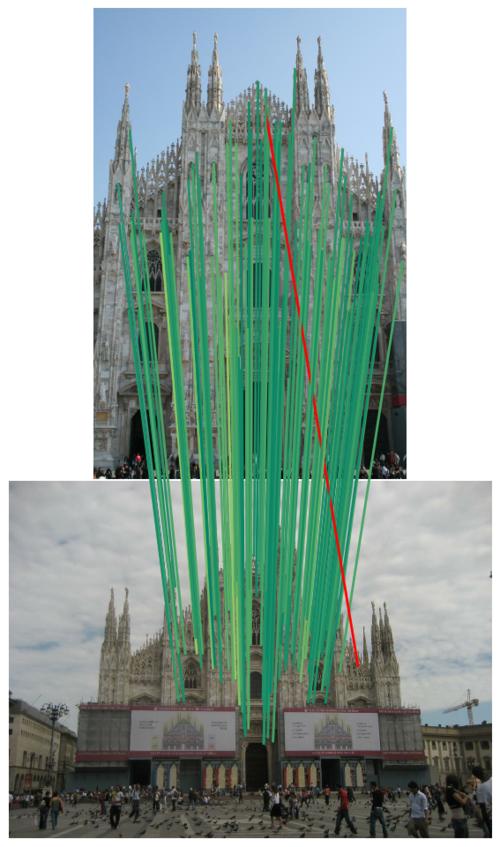
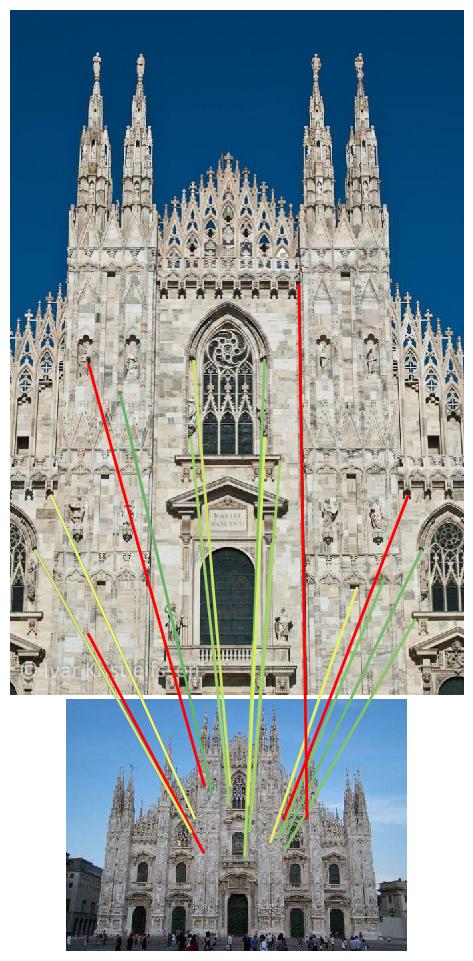
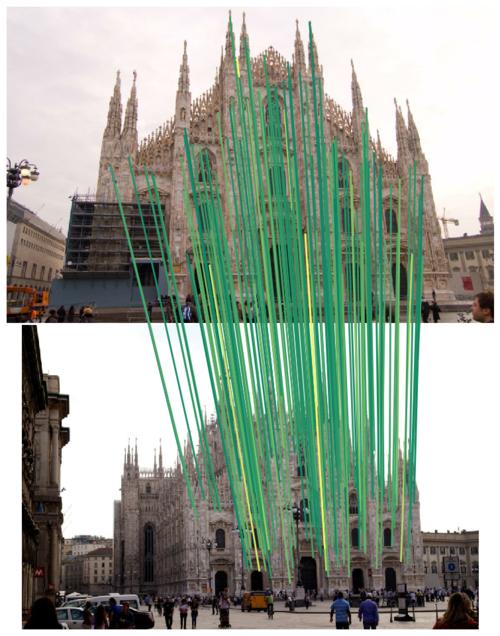
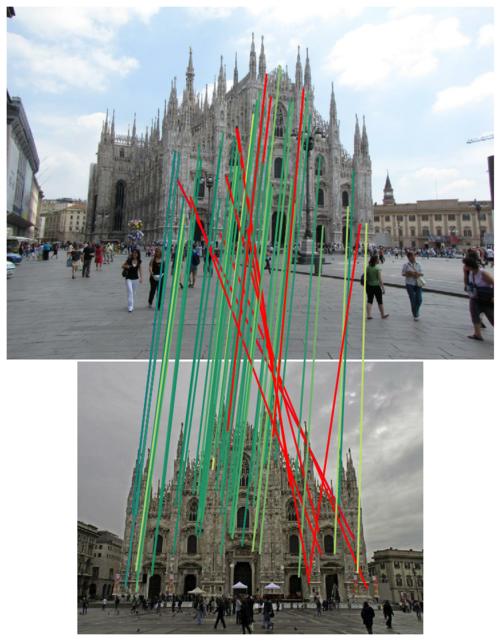
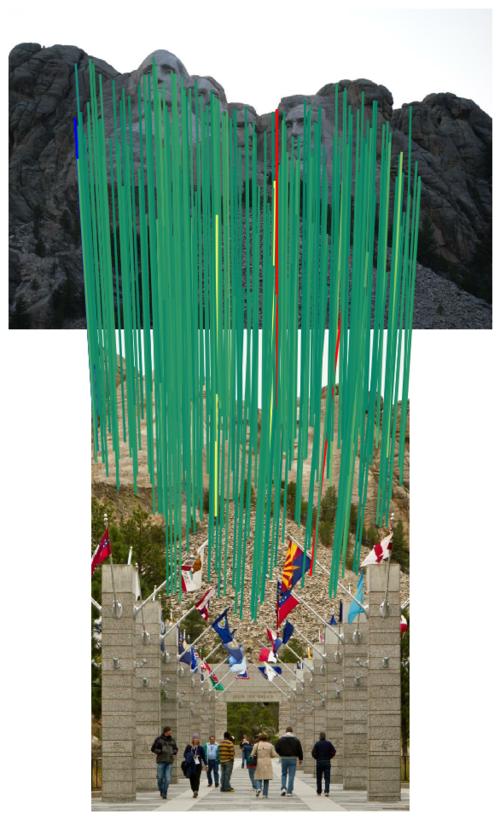
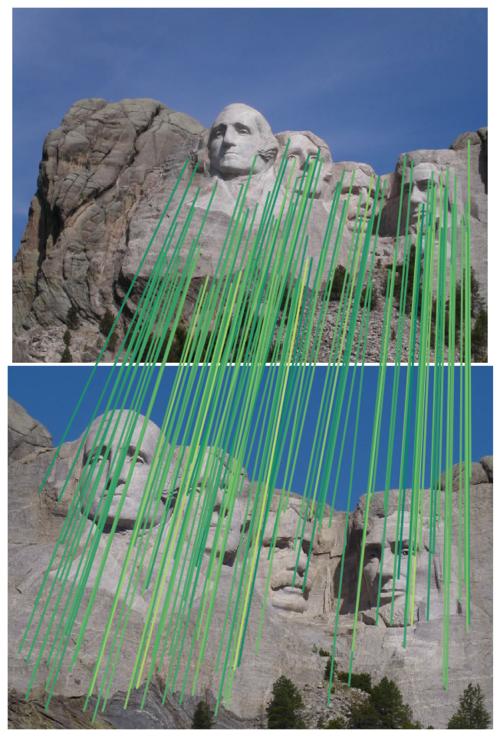
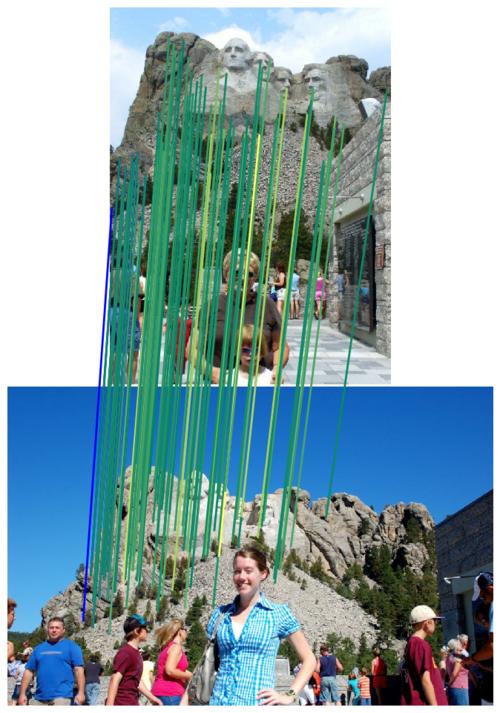
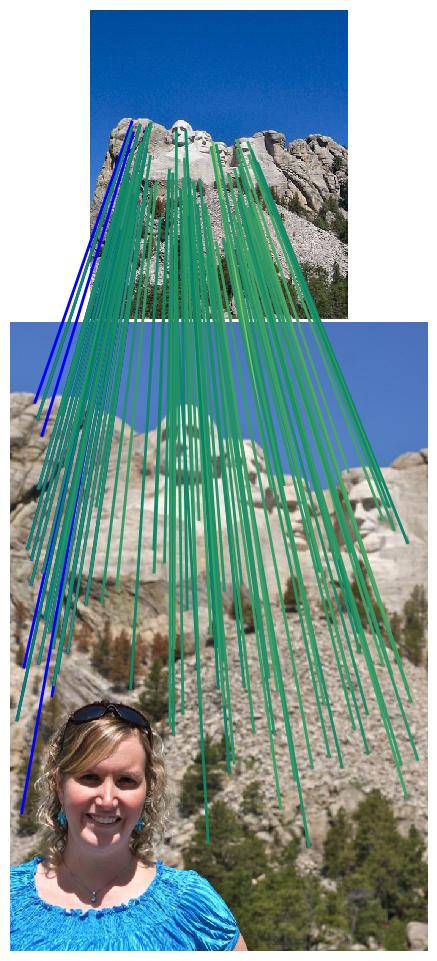
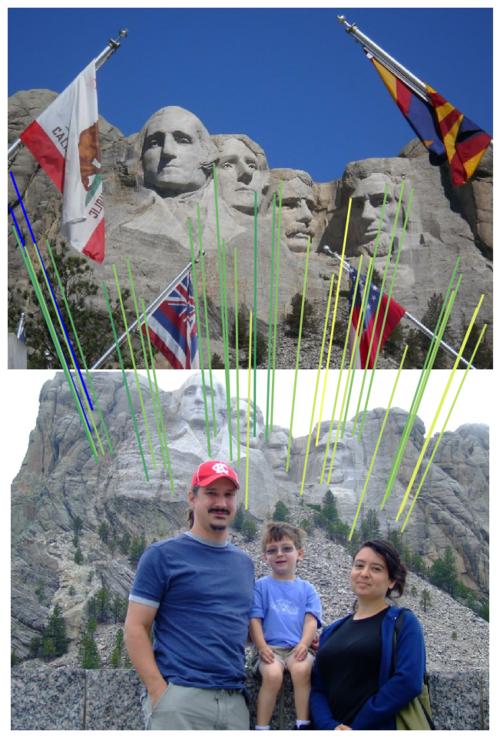
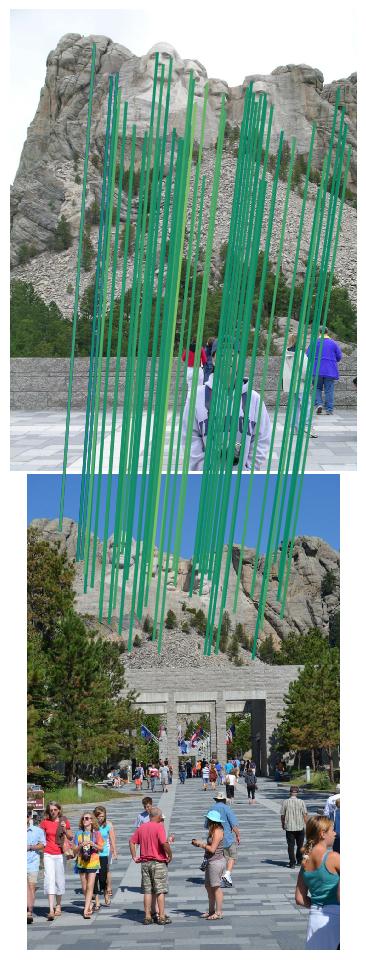
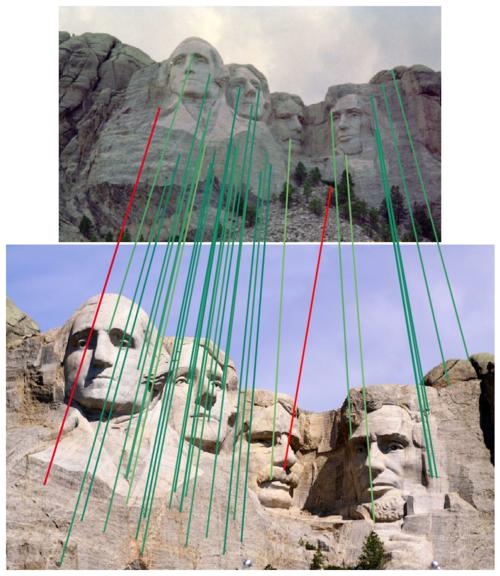
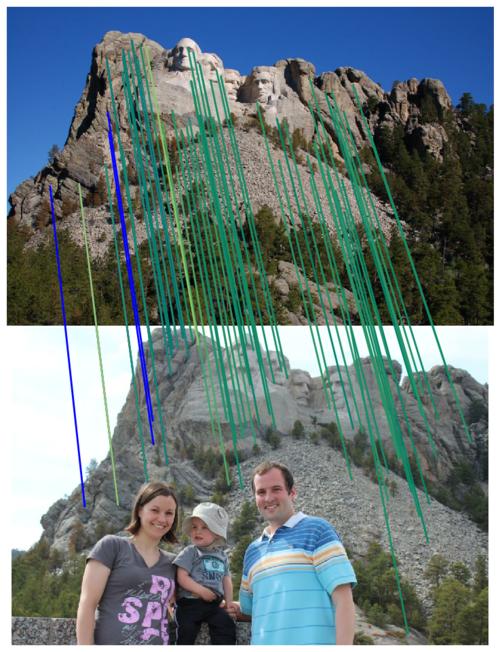
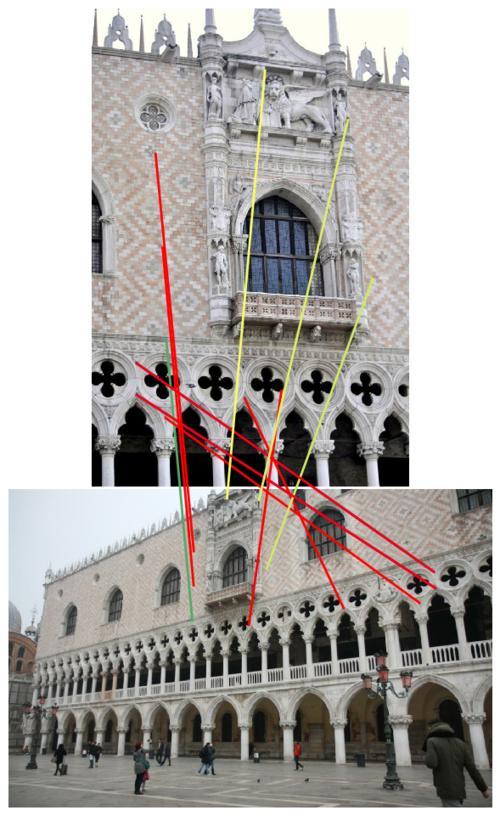
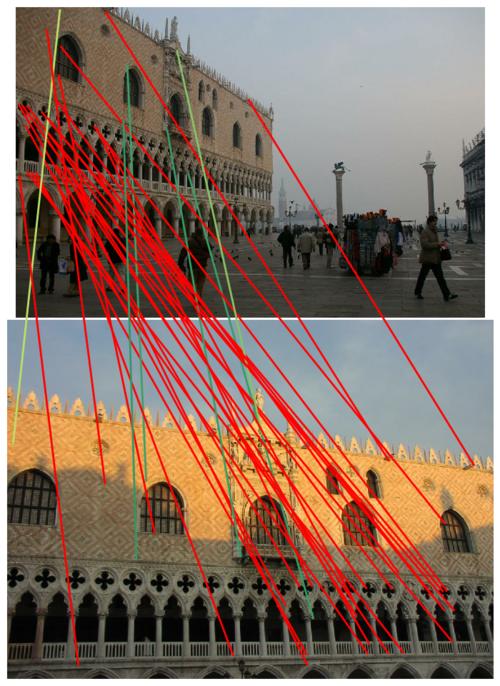
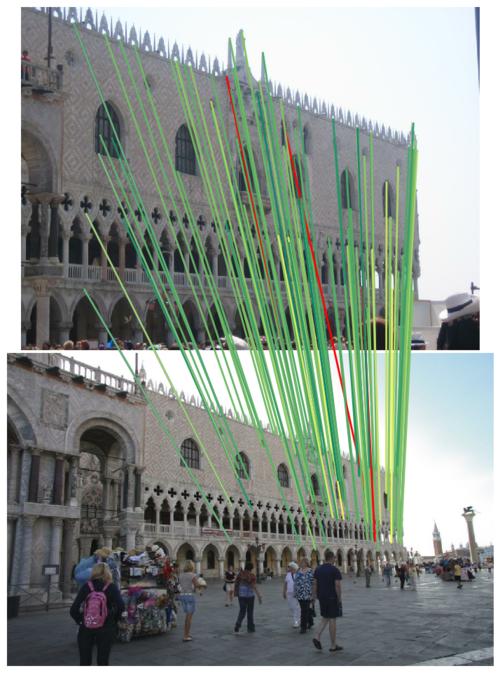
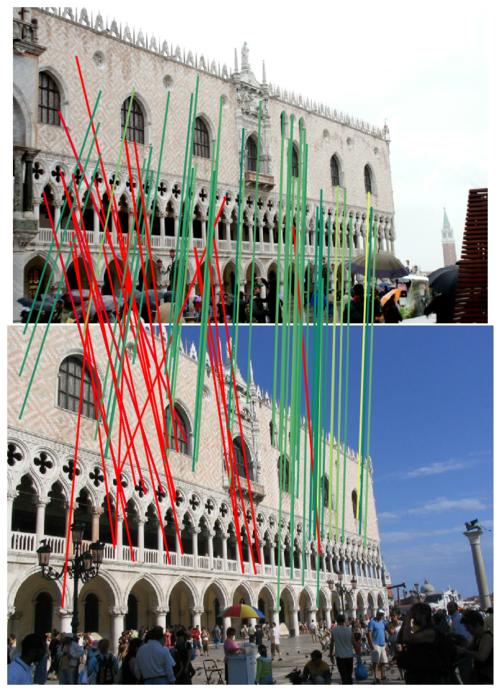
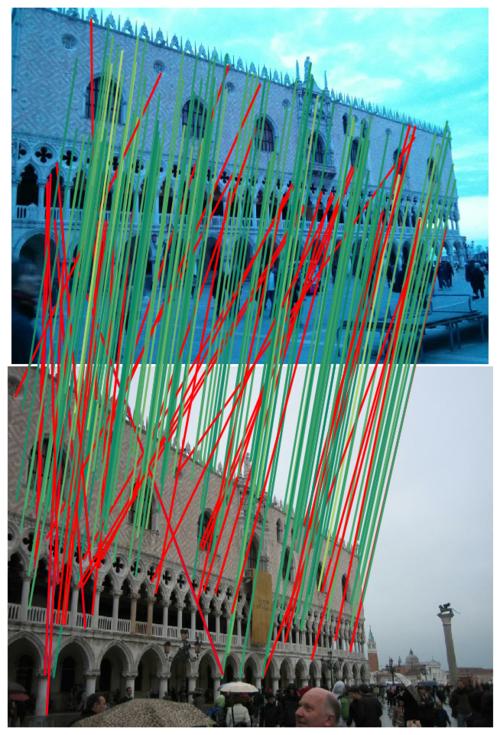
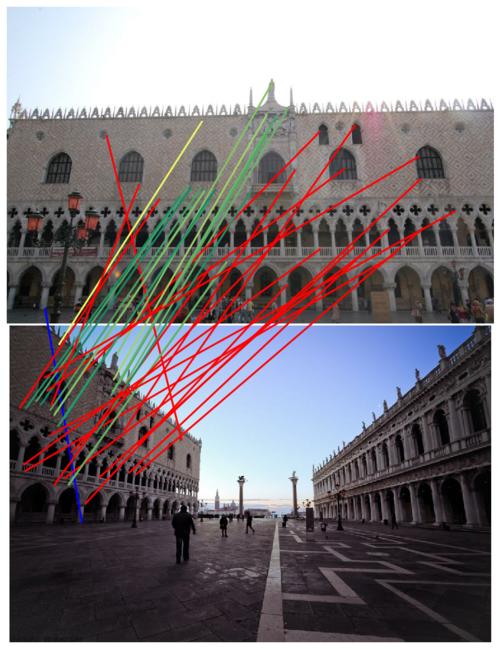
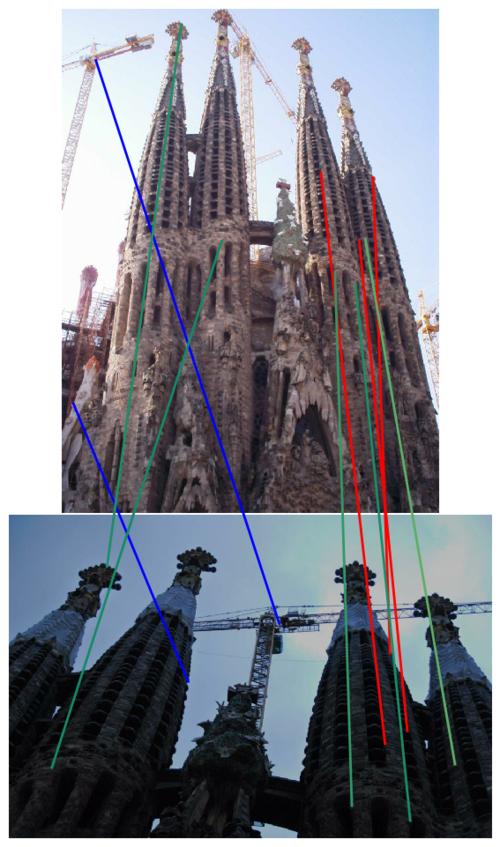
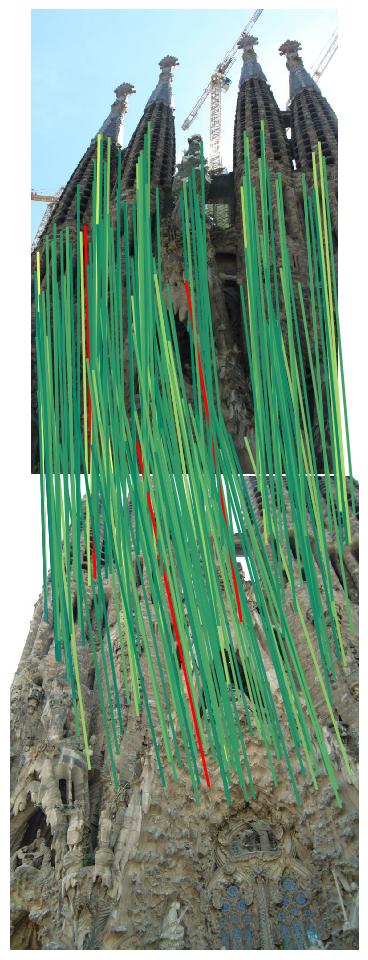
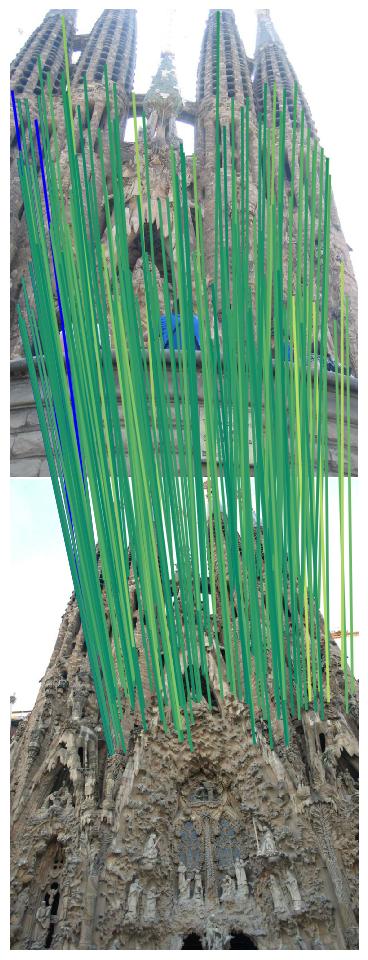
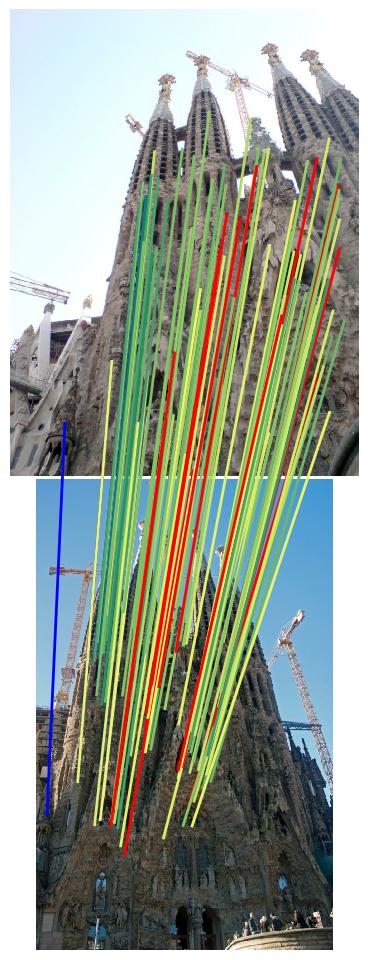
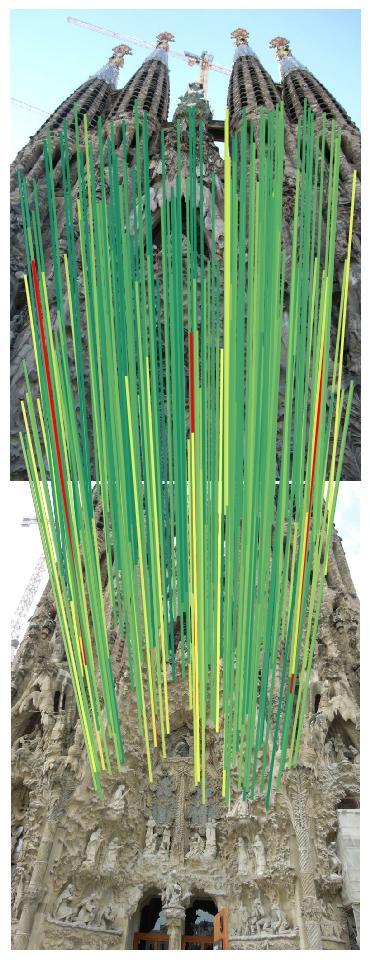
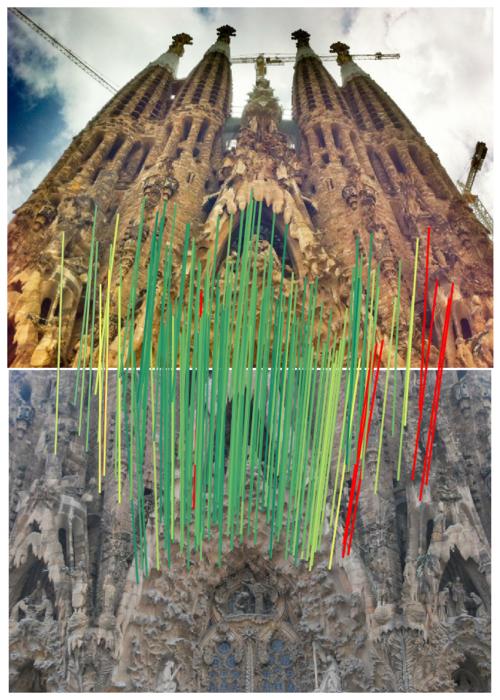
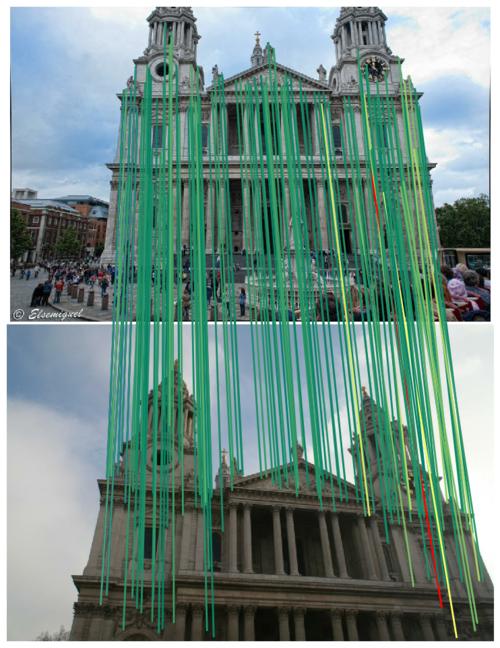
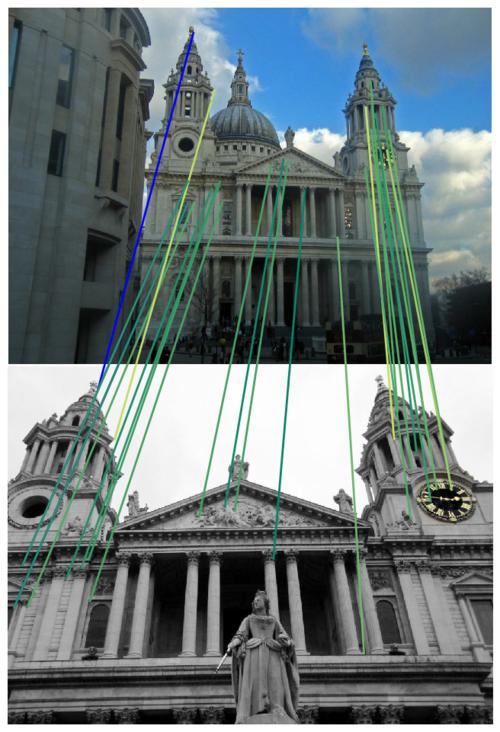
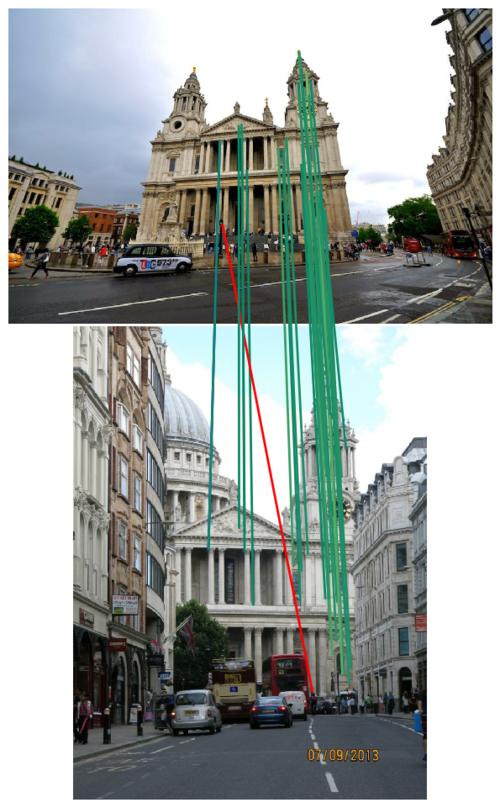
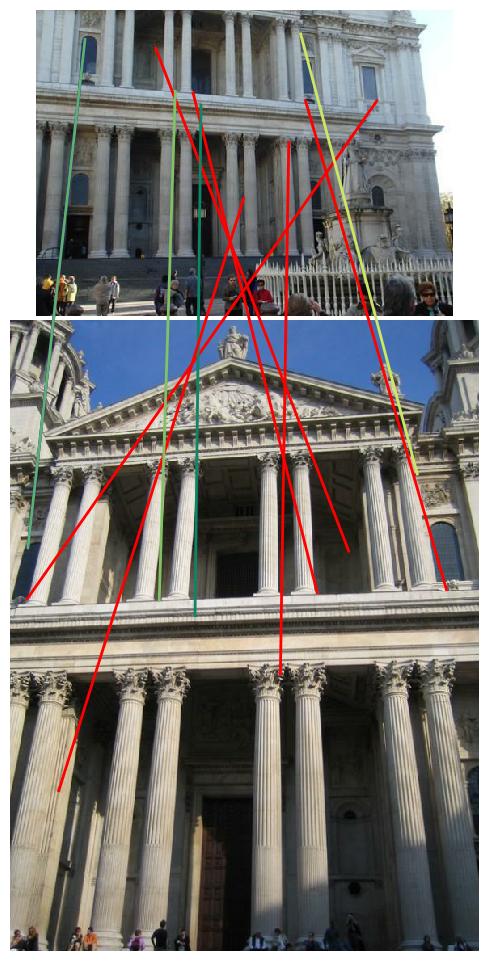
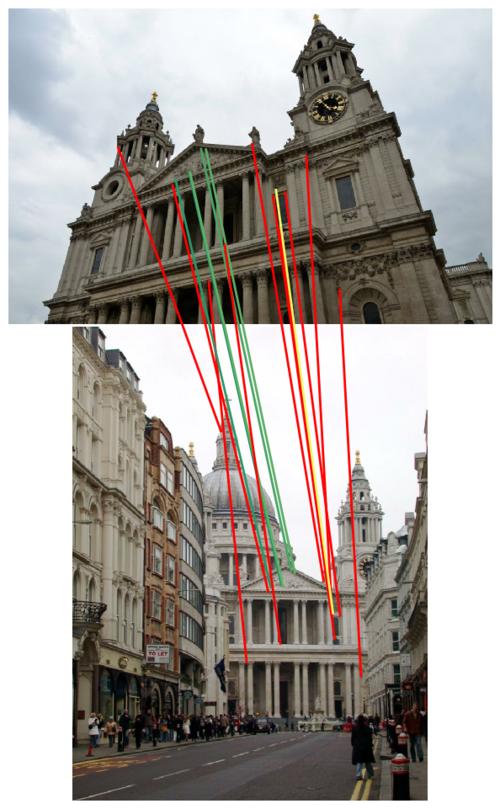
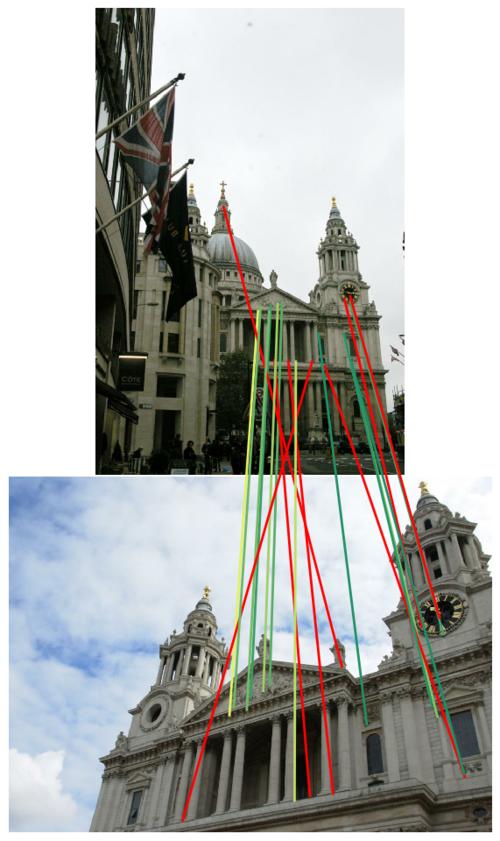
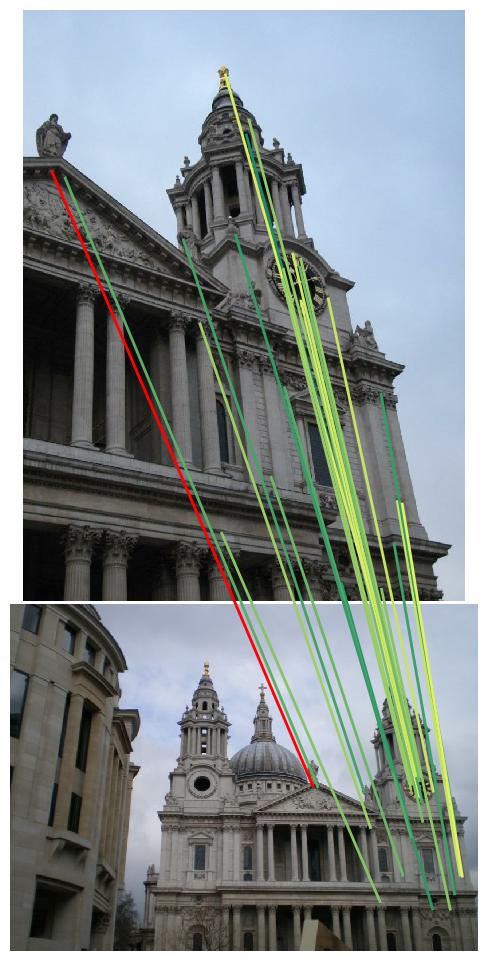
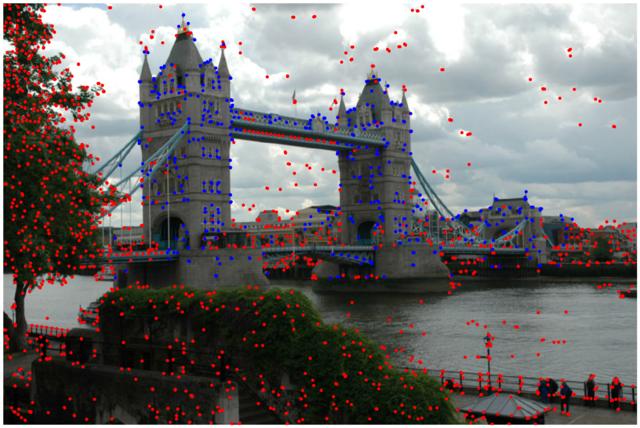
We show the inliers that survive the robust estimation loop (i.e. RANSAC), or those supplied with the submission if using custom matches, and use the depth estimates to determine whether they are correct. We draw matches above a 5-pixel error threshold in red, and those below are color-coded by their error, from 0 (green) to 5 pixels (yellow). Matches for which we do not have depth estimates are drawn in blue. Please note that the depth maps are estimates and may contain errors.
— british museum —






— florence cathedral side —




— lincoln memorial statue —

— london bridge —




— milan cathedral —



— mount rushmore —


— piazza san marco —




— sagrada familia —




— saint paul's cathedral —



Phototourism / Multiview track
mAA at 10 degrees: 0.64919 (±0.00171 over 3 run(s) / ±0.16112 over 9 scenes)
Rank (per category): 35 (of 108)
| Scene | Features | Matches (input) |
RegistrationRatio (%) | Number of Landmarks |
Track Length | ATE | mAA(50) | mAA(100) |
| bm | 2048.0 | 161.94 | 99.24 Rank: 83/108 |
818.49 Rank: 99/108 |
4.887 Rank: 61/108 |
0.49900 Rank: 21/108 |
0.43980 (±0.00600) Rank: 22/108 |
0.58854 (±0.00684) Rank: 22/108 |
| fcs | 2043.4 | 178.21 | 97.81 Rank: 30/108 |
1428.73 Rank: 89/108 |
4.331 Rank: 39/108 |
0.28278 Rank: 60/108 |
0.70866 (±0.01522) Rank: 31/108 |
0.78289 (±0.01571) Rank: 26/108 |
| lms | 2045.1 | 273.72 | 99.09 Rank: 28/108 |
1295.77 Rank: 59/108 |
5.348 Rank: 14/108 |
0.31567 Rank: 51/108 |
0.80681 (±0.00546) Rank: 19/108 |
0.87108 (±0.00588) Rank: 17/108 |
| lb | 2047.2 | 170.44 | 97.73 Rank: 43/108 |
982.32 Rank: 91/108 |
4.793 Rank: 32/108 |
0.52186 Rank: 60/108 |
0.60643 (±0.00227) Rank: 30/108 |
0.71168 (±0.00254) Rank: 35/108 |
| mc | 2043.6 | 139.89 | 98.26 Rank: 42/108 |
1010.80 Rank: 85/108 |
4.598 Rank: 33/108 |
0.44714 Rank: 46/108 |
0.44579 (±0.00736) Rank: 43/108 |
0.58726 (±0.00750) Rank: 43/108 |
| mr | 2045.2 | 170.53 | 91.03 Rank: 67/108 |
1285.06 Rank: 84/108 |
4.126 Rank: 43/108 |
0.55658 Rank: 44/108 |
0.35934 (±0.00360) Rank: 34/108 |
0.46879 (±0.00539) Rank: 42/108 |
| psm | 2037.9 | 68.23 | 79.56 Rank: 60/108 |
835.70 Rank: 94/108 |
3.114 Rank: 40/108 |
0.65508 Rank: 38/108 |
0.27629 (±0.00611) Rank: 43/108 |
0.33402 (±0.00473) Rank: 50/108 |
| sf | 2046.1 | 195.97 | 97.03 Rank: 40/108 |
1646.42 Rank: 85/108 |
4.382 Rank: 66/108 |
0.33144 Rank: 40/108 |
0.70586 (±0.00157) Rank: 22/108 |
0.78933 (±0.00332) Rank: 26/108 |
| spc | 2034.6 | 138.77 | 97.55 Rank: 72/108 |
1166.50 Rank: 94/108 |
4.265 Rank: 64/108 |
0.49834 Rank: 35/108 |
0.60879 (±0.00195) Rank: 65/108 |
0.70915 (±0.00269) Rank: 69/108 |
| avg | 2043.4 | 166.41 | 95.26 Rank: 58/108 |
1163.31 Rank: 92/108 |
4.427 Rank: 37/108 |
0.45643 Rank: 34/108 |
0.55086 (±0.00189) Rank: 35/108 |
0.64919 (±0.00171) Rank: 35/108 |
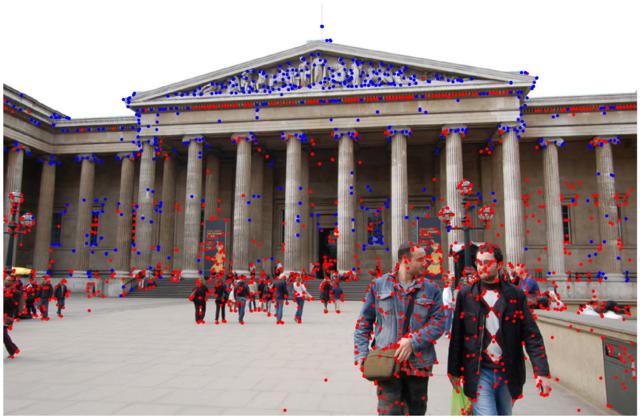
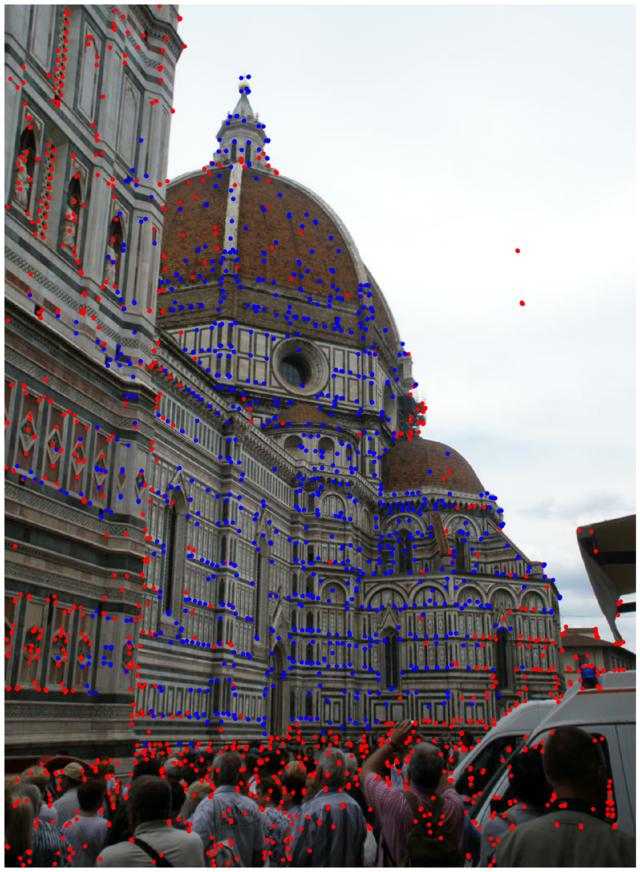
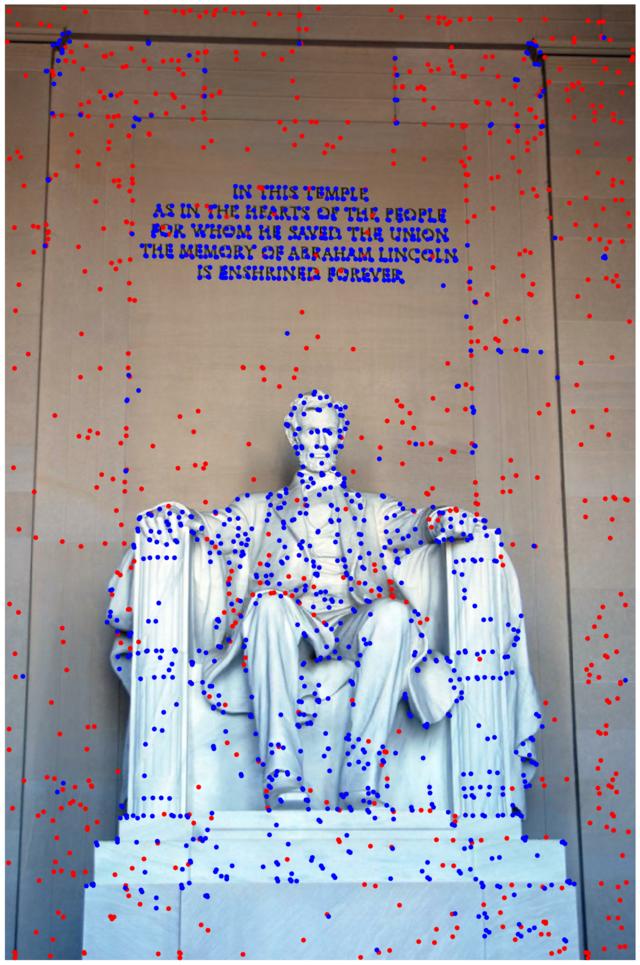
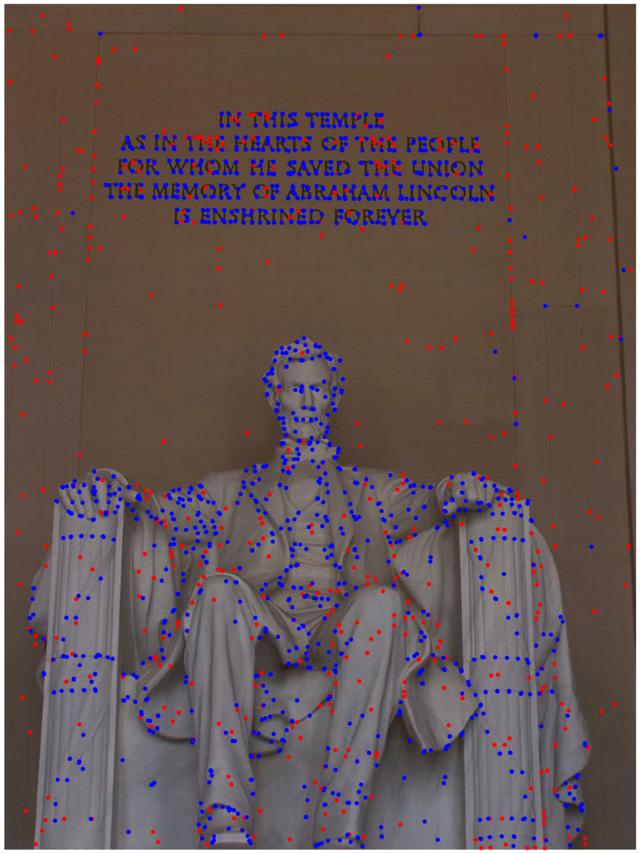
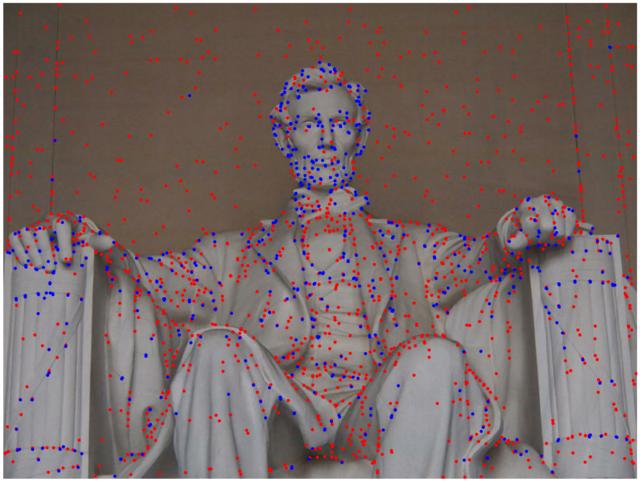
In the multi-view track we reconstruct the scene with Structure-from-Motion (Colmap) with small sets of images. We show the results for one bag of 25 images (displaying: 10). Keypoints are drawn in blue if they are part of the model, and in red otherwise.
— british museum —









— florence cathedral side —





— lincoln memorial statue —



— london bridge —







— milan cathedral —








— mount rushmore —




— piazza san marco —





— sagrada familia —



— saint paul's cathedral —