Submission ID: 00556
HarrisZ + DeepOrientation + SOSNet + Blob Matching + DTM + RANSAC planar 5
Processed: 20-05-11. Download link: sid-00556-harrisz_sosnet_blob_dtm_ransac_hom_5.json
This page ranks the submission against all others using the same number of keypoints, regardless of descriptor size. Please hover over table headers for descriptions on metrics and full scene names.
Metadata
- Authors: Fabio Bellavia (contact)
- Keypoint: hz
- Descriptor: deep-oriented-sosnet (128 float32: 512 bytes)
- Number of features: 8000
- Summary: HarrisZ [Bellavia et al. 2011] + Deep patch orientation [Yi et al. 2015] + SOSNet [Tian at al. 2019] (weights: sosnet-32x32-hpatches_a.pth) + Blob Matching [unpublished] + Delaunay Triangulation Matching (DTM) [unpublished] + PyRANSAC (threshold 5) [Mishkin 2019]
- Paper: N/A
- Website: N/A
- Origin: Submission
- Flags: is_submission, is_challenge_2020
Phototourism / Stereo track
mAA at 10 degrees: 0.04192 (±0.00000 over 3 run(s) / ±0.01966 over 9 scenes)
Rank (per category): 144 (of 147)
| Scene | Features | Matches (matcher) |
Matches (filter) |
Matches (final) |
Rep. @ 3 px. | MS @ 3 px. | mAA(5o) | mAA(10o) |
| bm | 1696.4 | — | — | 360.0 | 0.477 Rank: 132/147 |
0.775 Rank: 133/147 |
0.00862 (±0.00000) Rank: 142/147 |
0.02698 (±0.00000) Rank: 142/147 |
| fcs | 2616.4 | — | — | 335.8 | 0.344 Rank: 136/147 |
0.726 Rank: 132/147 |
0.01945 (±0.00000) Rank: 144/147 |
0.05799 (±0.00000) Rank: 144/147 |
| lms | 1358.4 | — | — | 288.9 | 0.349 Rank: 136/147 |
0.571 Rank: 135/147 |
0.03967 (±0.00000) Rank: 142/147 |
0.08279 (±0.00000) Rank: 143/147 |
| lb | 1913.6 | — | — | 240.2 | 0.298 Rank: 137/147 |
0.570 Rank: 132/147 |
0.00899 (±0.00000) Rank: 142/147 |
0.02909 (±0.00000) Rank: 144/147 |
| mc | 2682.0 | — | — | 483.7 | 0.419 Rank: 136/147 |
0.717 Rank: 137/147 |
0.01688 (±0.00000) Rank: 142/147 |
0.05090 (±0.00000) Rank: 142/147 |
| mr | 2879.3 | — | — | 562.5 | 0.375 Rank: 136/147 |
0.740 Rank: 135/147 |
0.01323 (±0.00000) Rank: 142/147 |
0.04199 (±0.00000) Rank: 141/147 |
| psm | 2661.0 | — | — | 219.4 | 0.323 Rank: 136/147 |
0.477 Rank: 118/147 |
0.00251 (±0.00000) Rank: 144/147 |
0.01101 (±0.00000) Rank: 144/147 |
| sf | 3588.6 | — | — | 653.4 | 0.382 Rank: 136/147 |
0.634 Rank: 136/147 |
0.01350 (±0.00000) Rank: 144/147 |
0.04534 (±0.00000) Rank: 143/147 |
| spc | 2296.1 | — | — | 322.4 | 0.349 Rank: 136/147 |
0.607 Rank: 134/147 |
0.00959 (±0.00000) Rank: 144/147 |
0.03119 (±0.00000) Rank: 144/147 |
| avg | 2410.2 | — | — | 385.2 | 0.368 Rank: 136/147 |
0.646 Rank: 134/147 |
0.01472 (±0.00000) Rank: 144/147 |
0.04192 (±0.00000) Rank: 144/147 |
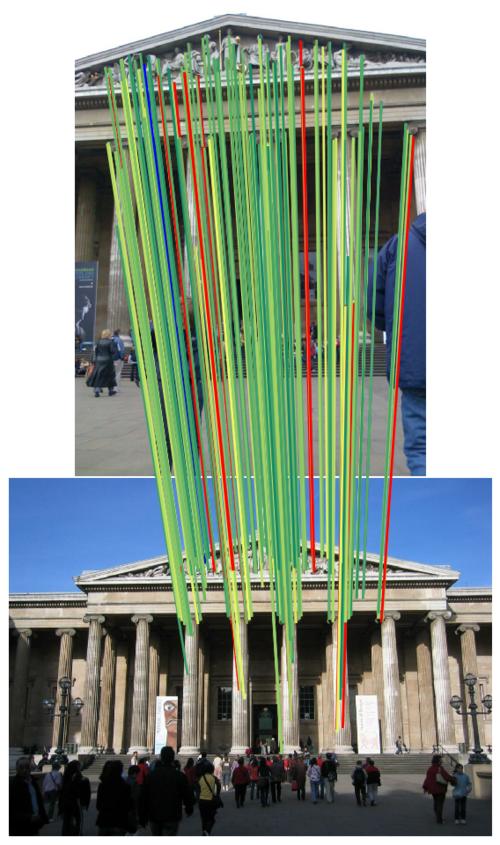
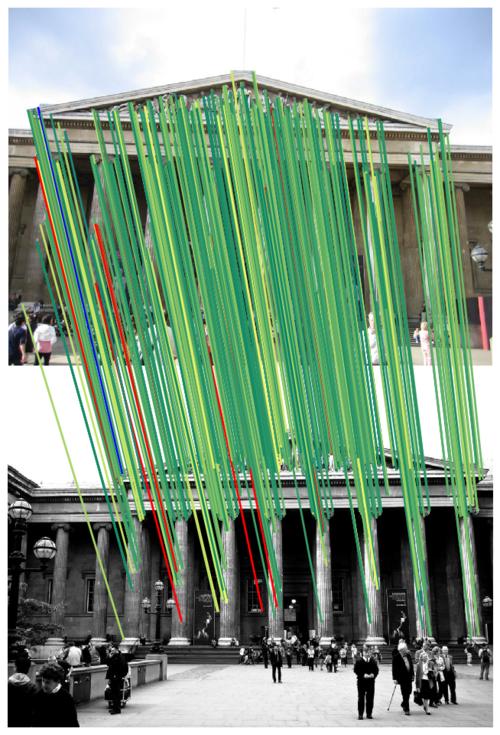
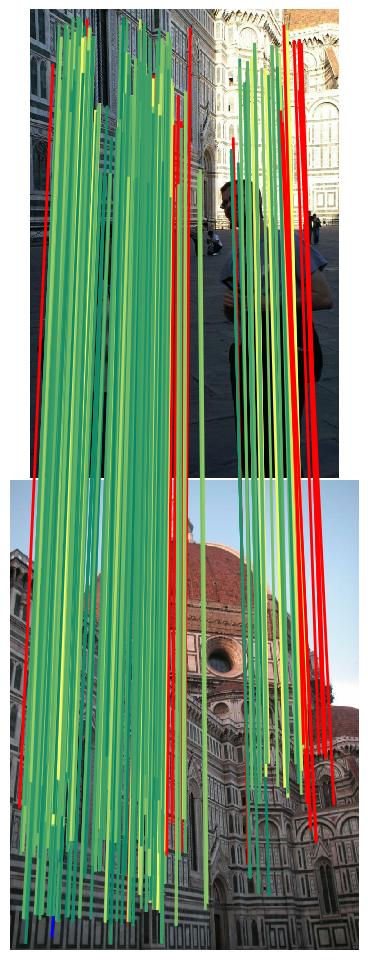
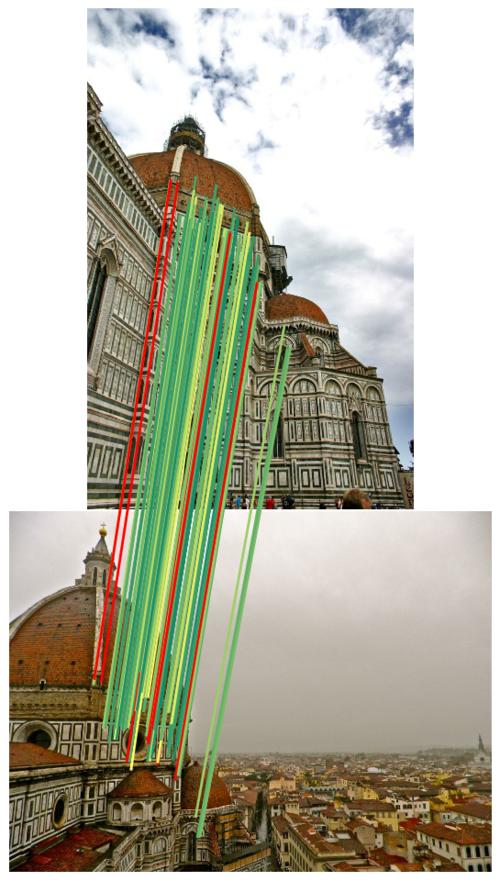
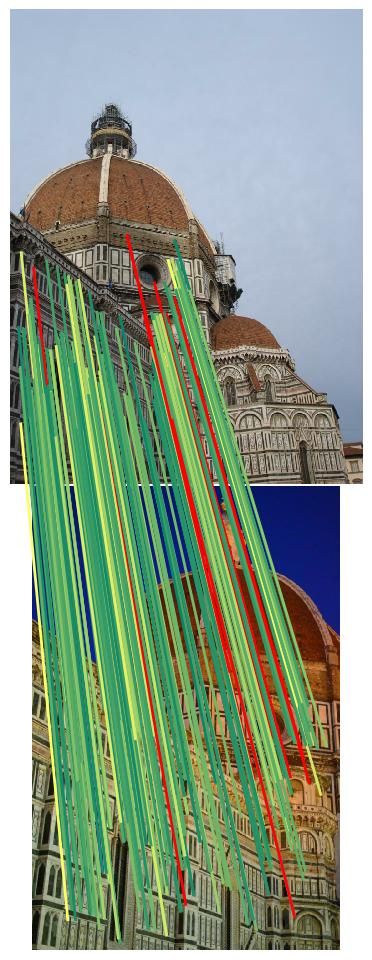
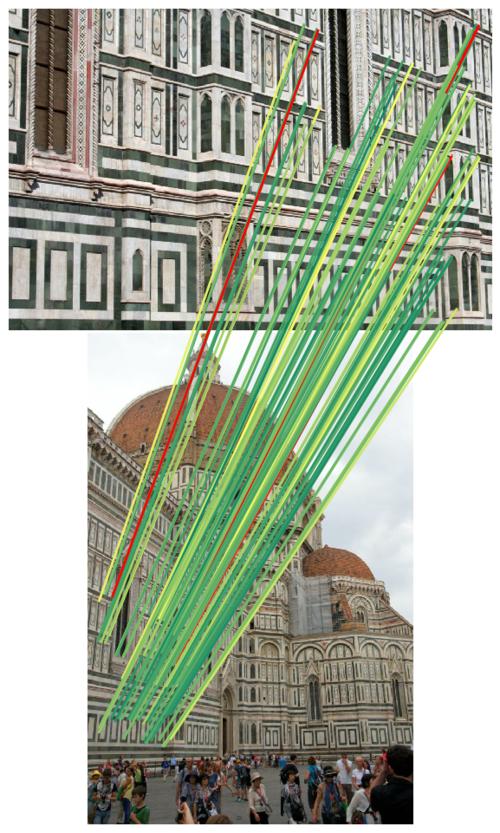
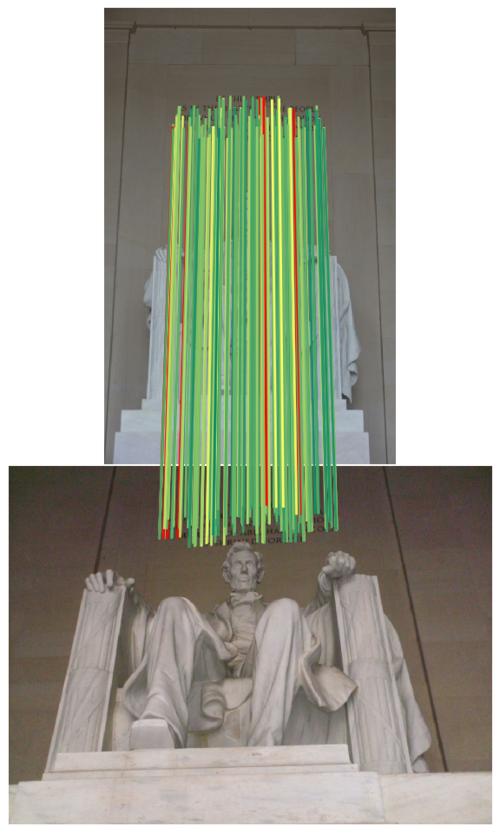
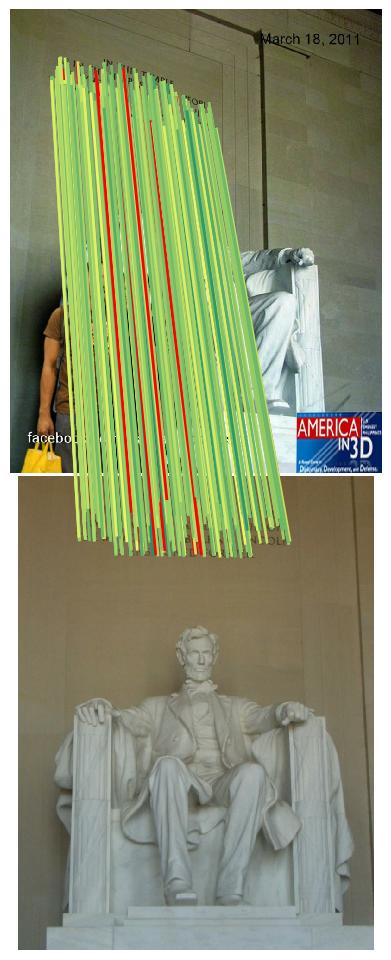
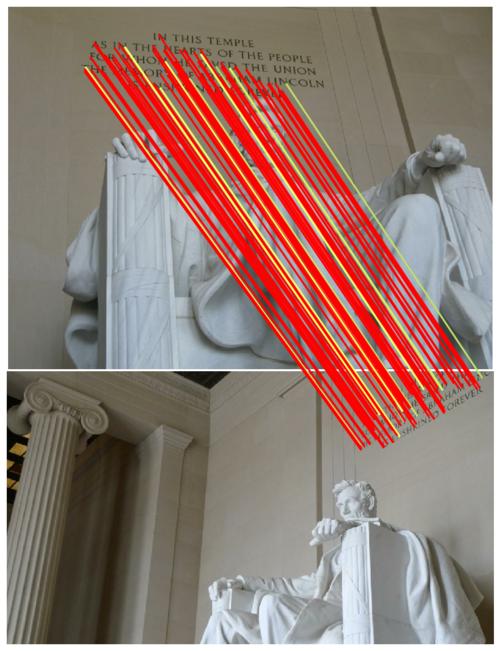
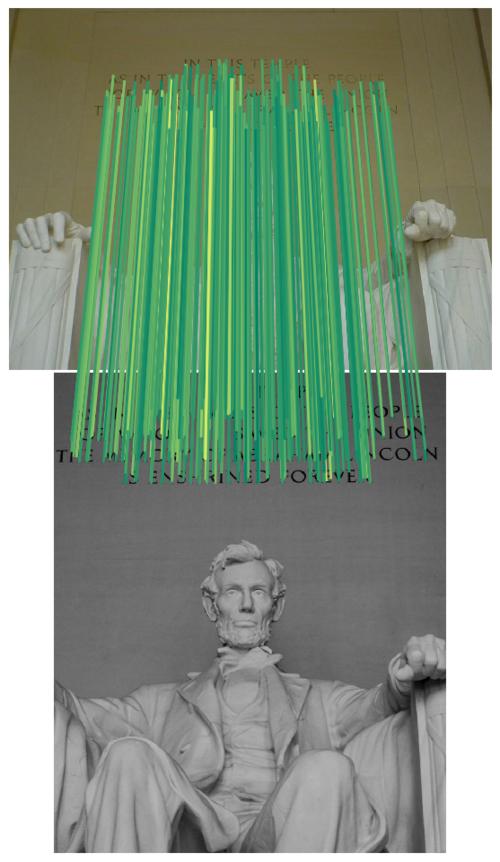
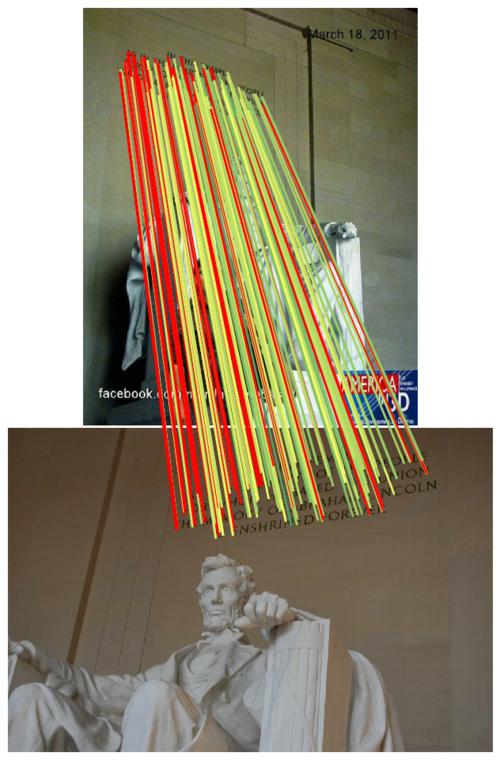
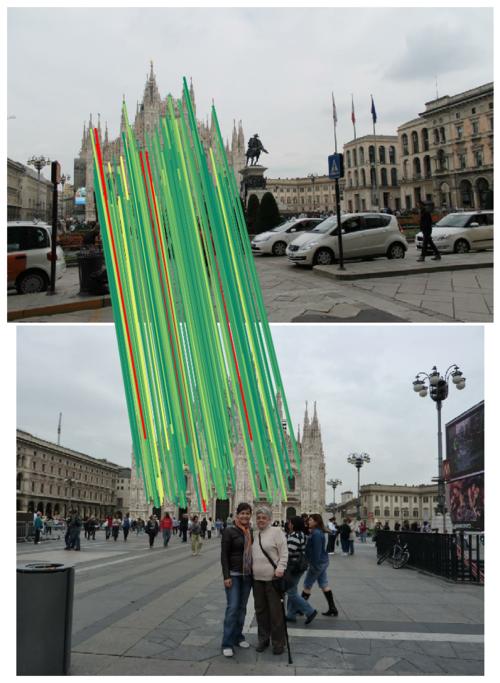
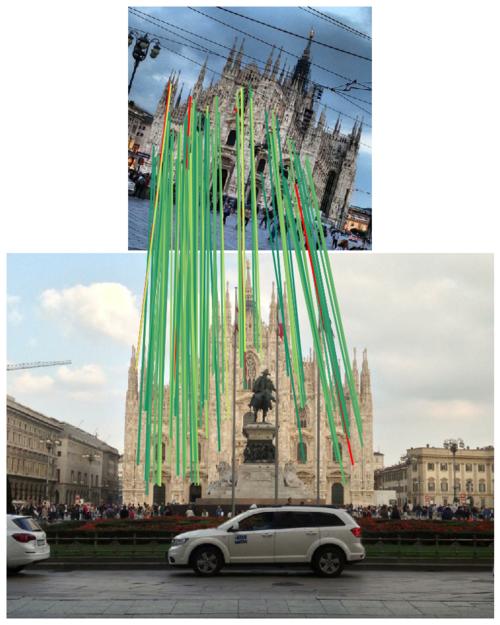
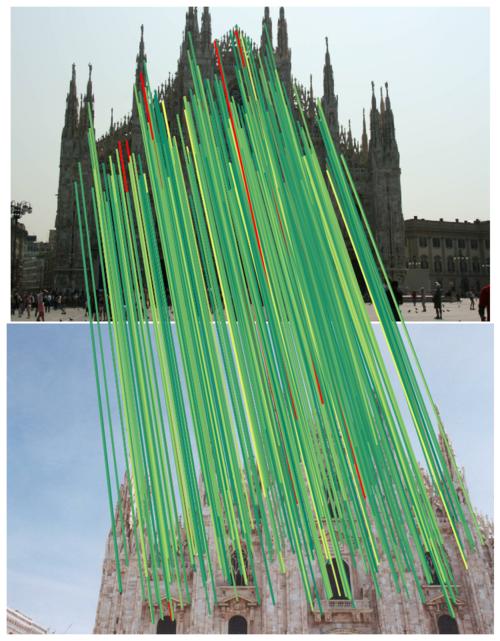
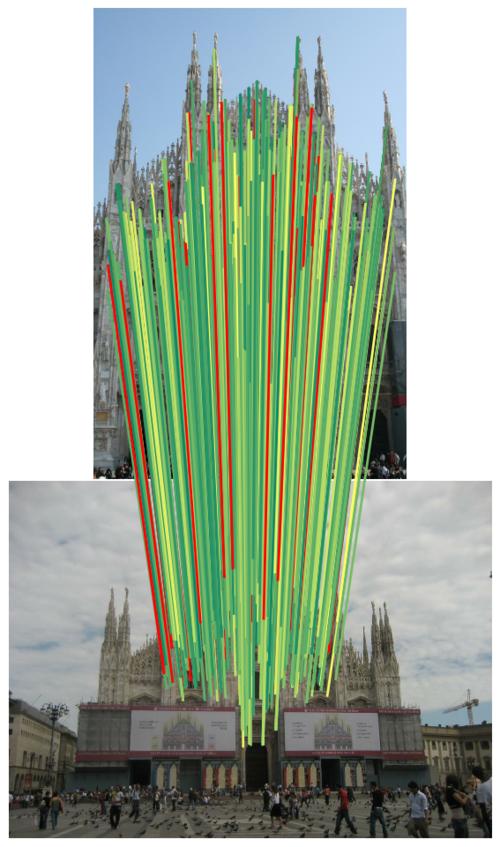
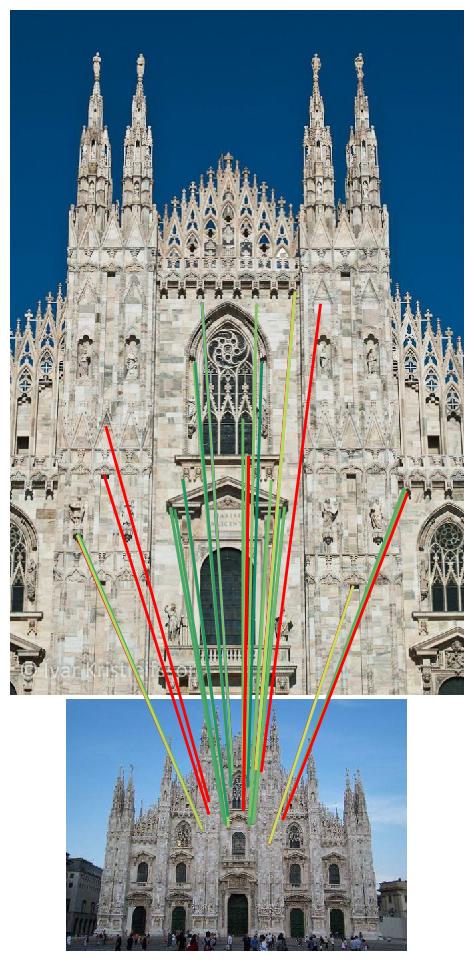
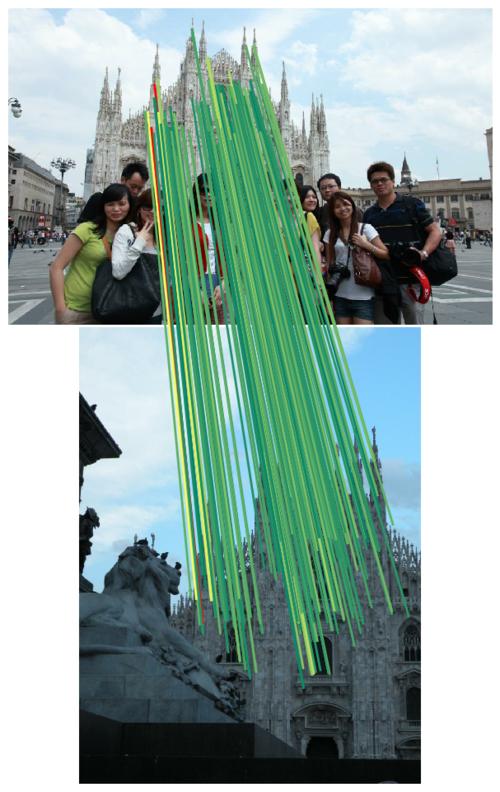
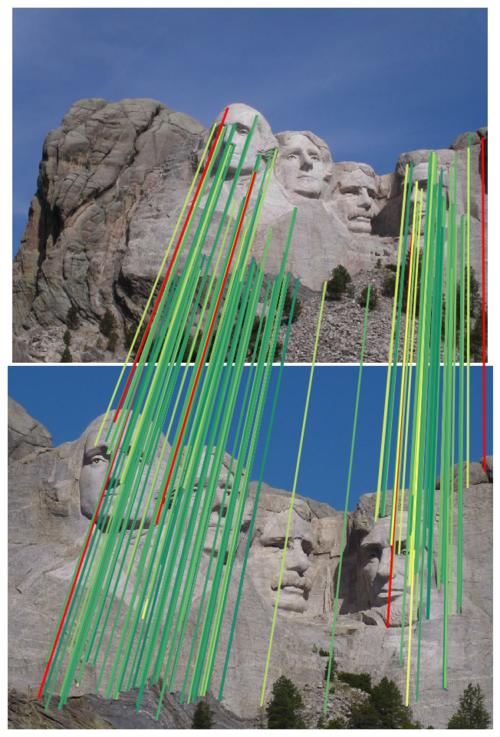
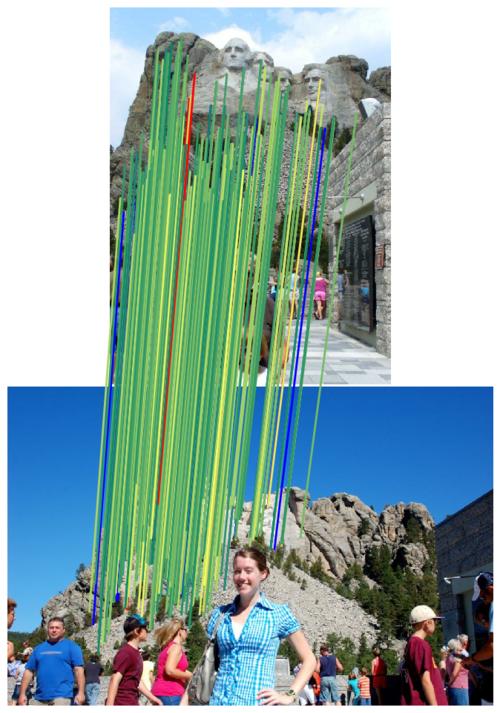
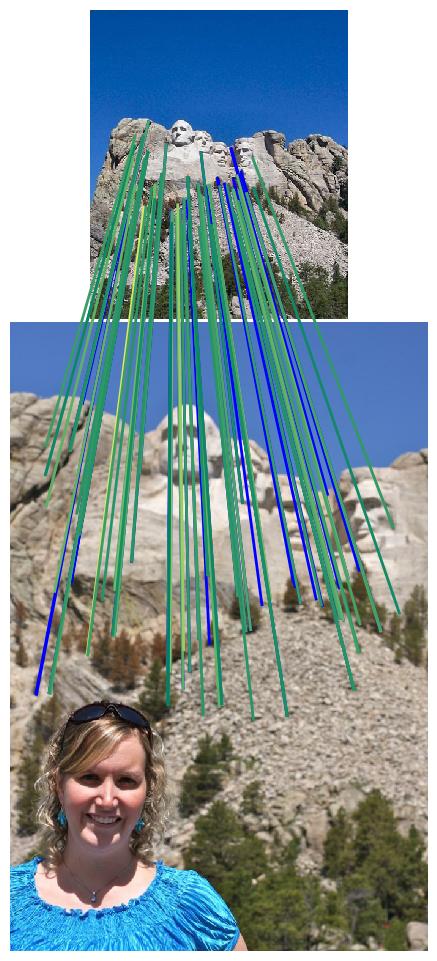
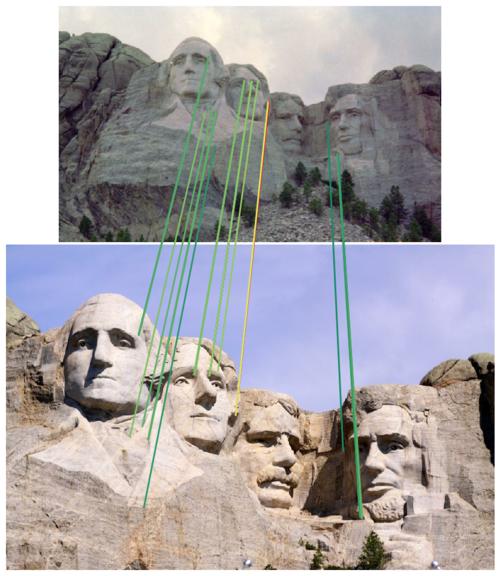
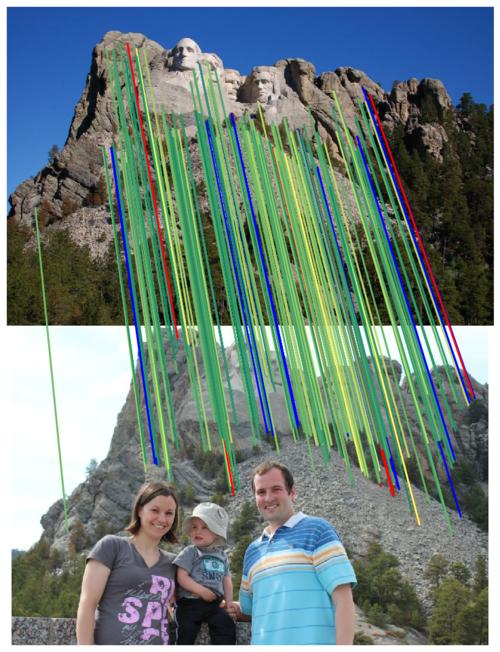
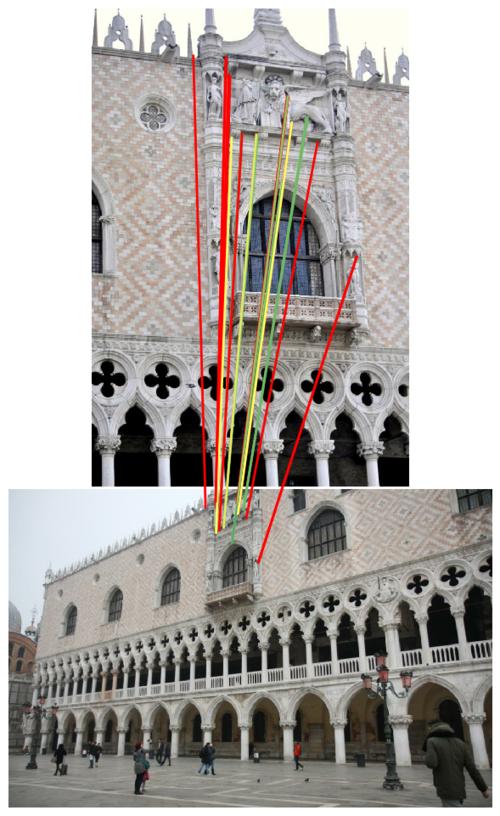
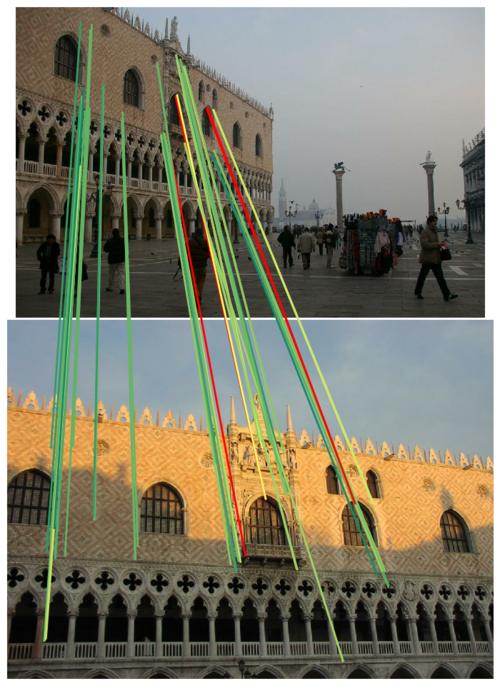
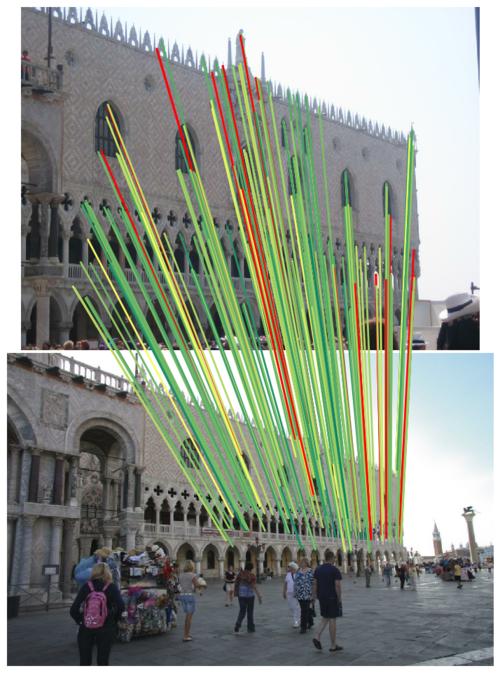
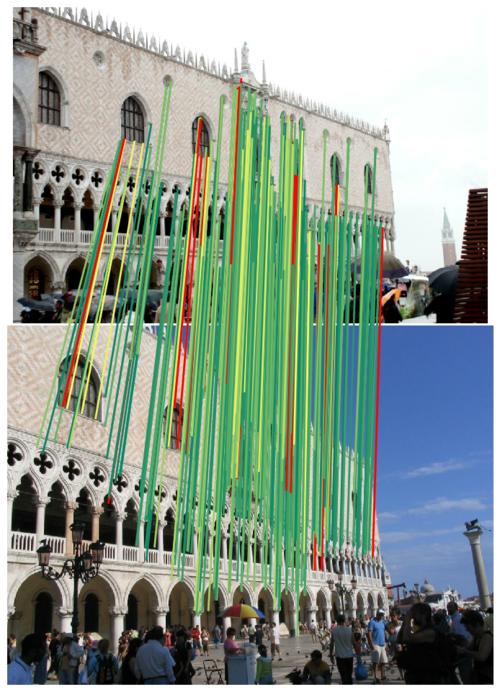
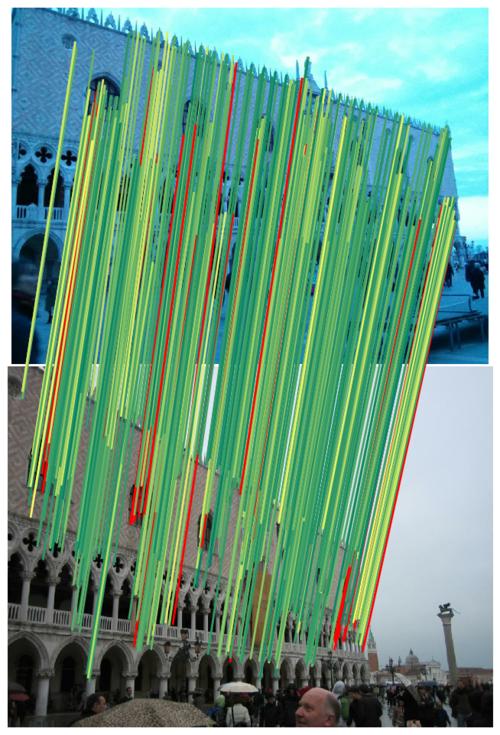
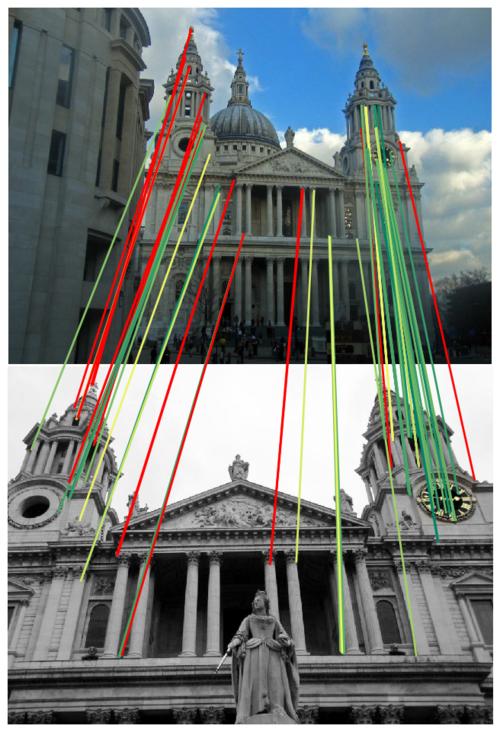
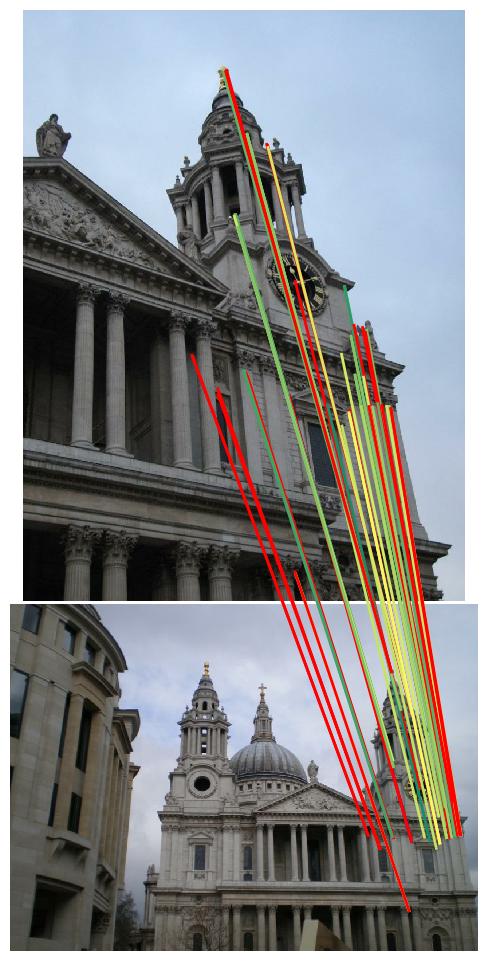
We show the inliers that survive the robust estimation loop (i.e. RANSAC), or those supplied with the submission if using custom matches, and use the depth estimates to determine whether they are correct. We draw matches above a 5-pixel error threshold in red, and those below are color-coded by their error, from 0 (green) to 5 pixels (yellow). Matches for which we do not have depth estimates are drawn in blue. Please note that the depth maps are estimates and may contain errors.
— british museum —








— florence cathedral side —






— lincoln memorial statue —





— london bridge —










— milan cathedral —




— mount rushmore —





— piazza san marco —





— sagrada familia —








— saint paul's cathedral —






Phototourism / Multiview track
mAA at 10 degrees: 0.48498 (±0.00118 over 3 run(s) / ±0.11344 over 9 scenes)
Rank (per category): 135 (of 147)
| Scene | Features | Matches (input) |
RegistrationRatio (%) | Number of Landmarks |
Track Length | ATE | mAA(50) | mAA(100) |
| bm | 1696.4 | 358.96 | 99.73 Rank: 74/147 |
747.22 Rank: 146/147 |
5.407 Rank: 2/147 |
0.78541 Rank: 136/147 |
0.21210 (±0.00238) Rank: 136/147 |
0.35412 (±0.00104) Rank: 136/147 |
| fcs | 2616.4 | 345.91 | 96.46 Rank: 134/147 |
1640.32 Rank: 145/147 |
3.987 Rank: 130/147 |
0.44523 Rank: 142/147 |
0.45184 (±0.00923) Rank: 141/147 |
0.53087 (±0.00933) Rank: 141/147 |
| lms | 1358.4 | 308.15 | 94.66 Rank: 140/147 |
857.16 Rank: 146/147 |
4.758 Rank: 9/147 |
0.64361 Rank: 144/147 |
0.30426 (±0.00928) Rank: 143/147 |
0.42038 (±0.01254) Rank: 143/147 |
| lb | 1913.6 | 292.54 | 96.80 Rank: 125/147 |
875.78 Rank: 147/147 |
4.582 Rank: 78/147 |
0.60254 Rank: 136/147 |
0.28821 (±0.00987) Rank: 136/147 |
0.42816 (±0.01074) Rank: 136/147 |
| mc | 2682.0 | 471.12 | 99.68 Rank: 66/147 |
1494.77 Rank: 142/147 |
4.868 Rank: 43/147 |
0.52836 Rank: 135/147 |
0.34607 (±0.00070) Rank: 135/147 |
0.51589 (±0.00247) Rank: 133/147 |
| mr | 2879.3 | 558.49 | 93.18 Rank: 103/147 |
1843.14 Rank: 141/147 |
4.201 Rank: 68/147 |
0.71108 Rank: 135/147 |
0.22579 (±0.00651) Rank: 136/147 |
0.32804 (±0.00834) Rank: 136/147 |
| psm | 2661.0 | 216.76 | 93.27 Rank: 55/147 |
1626.88 Rank: 144/147 |
3.618 Rank: 34/147 |
0.61258 Rank: 35/147 |
0.38252 (±0.00689) Rank: 73/147 |
0.46320 (±0.00710) Rank: 76/147 |
| sf | 3588.6 | 650.64 | 98.00 Rank: 63/147 |
2790.15 Rank: 143/147 |
4.241 Rank: 109/147 |
0.39661 Rank: 134/147 |
0.56586 (±0.00256) Rank: 137/147 |
0.67621 (±0.00466) Rank: 137/147 |
| spc | 2296.1 | 330.11 | 99.73 Rank: 29/147 |
1401.27 Rank: 144/147 |
4.424 Rank: 44/147 |
0.68733 Rank: 135/147 |
0.49395 (±0.00109) Rank: 135/147 |
0.64798 (±0.00200) Rank: 134/147 |
| avg | 2410.2 | 392.52 | 96.83 Rank: 95/147 |
1475.19 Rank: 143/147 |
4.454 Rank: 55/147 |
0.60142 Rank: 135/147 |
0.36340 (±0.00077) Rank: 136/147 |
0.48498 (±0.00118) Rank: 135/147 |
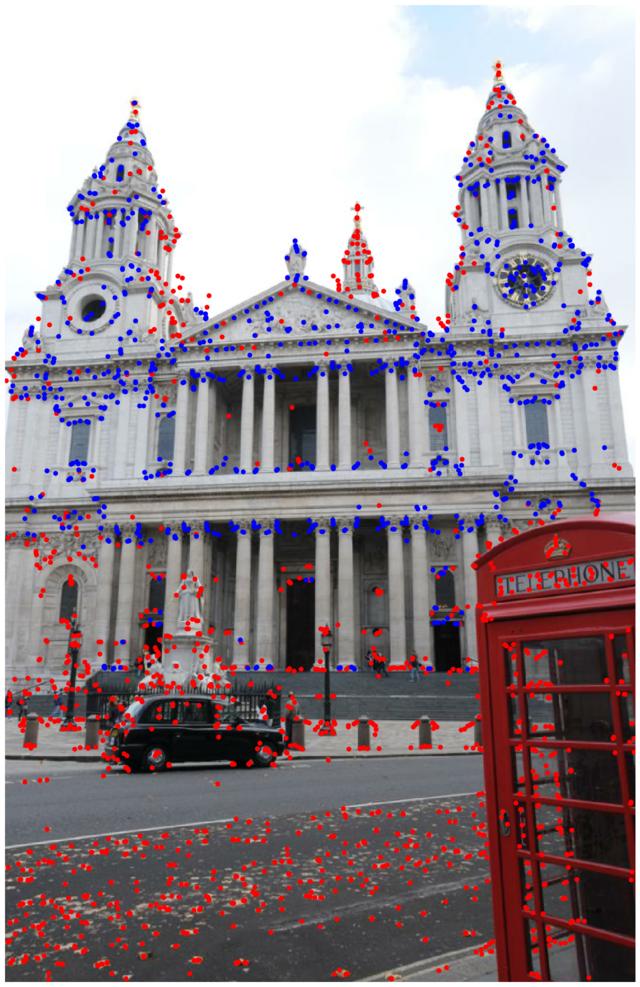
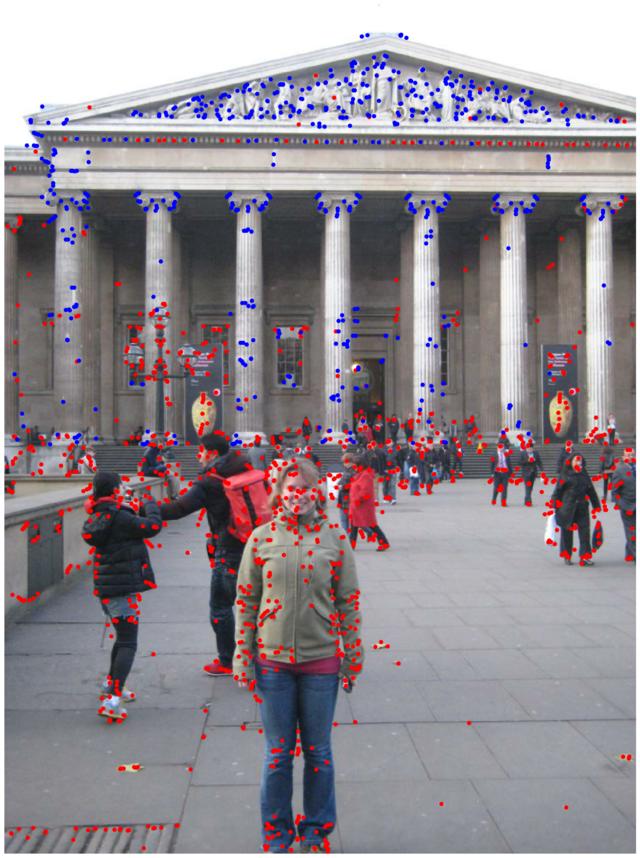
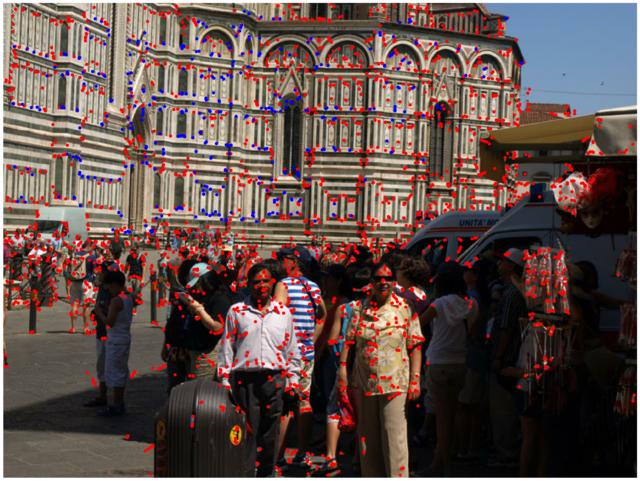
In the multi-view track we reconstruct the scene with Structure-from-Motion (Colmap) with small sets of images. We show the results for one bag of 25 images (displaying: 10). Keypoints are drawn in blue if they are part of the model, and in red otherwise.
— british museum —









— florence cathedral side —







— lincoln memorial statue —






— london bridge —








— milan cathedral —







— mount rushmore —










— piazza san marco —






— sagrada familia —







— saint paul's cathedral —