Submission ID: 63a3b664
Tio-2K
Processed: 21-06-16. Download link: 63a3b664ce1ced59-tio-2k.json
This page ranks the submission against all others using the same number of keypoints, regardless of descriptor size. Please hover over table headers for descriptions on metrics and full scene names.
- Phototourism dataset: Stereo track / Multiview track
- Prague Parks dataset: Stereo track / Multiview track
- Google Urban dataset: Stereo track / Multiview track
Metadata
- Authors: Tio (contact)
- Keypoint: orbment
- Descriptor: orbment (128 float32: 512 bytes)
- Number of features: 2048
- Summary: Tio-2K
- Paper: N/A
- Website: N/A
- Processing date: 21-06-16
Phototourism dataset / Stereo track
mAA at 10 degrees: 0.33775 (±0.00000 over 1 run(s) / ±0.11821 over 9 scenes)
Rank (per category): 72 (of 87)
| Scene | Features | Matches (raw) |
Matches (final) |
Rep. @ 3 px. | MS @ 3 px. | mAA(5o) | mAA(10o) |
| BM | 2048.0 | — | 842.8 | 0.605 Rank: 6/87 |
0.924 Rank: 23/87 |
0.10972 (±0.00000) Rank: 73/87 |
0.21187 (±0.00000) Rank: 73/87 |
| FCS | 2048.0 | — | 429.1 | 0.407 Rank: 34/87 |
0.834 Rank: 63/87 |
0.29591 (±0.00000) Rank: 78/87 |
0.40422 (±0.00000) Rank: 79/87 |
| LMS | 2048.0 | — | 419.6 | 0.380 Rank: 60/87 |
0.631 Rank: 76/87 |
0.37179 (±0.00000) Rank: 73/87 |
0.48631 (±0.00000) Rank: 72/87 |
| LB | 2045.5 | — | 471.6 | 0.448 Rank: 11/87 |
0.716 Rank: 20/87 |
0.24823 (±0.00000) Rank: 73/87 |
0.35314 (±0.00000) Rank: 72/87 |
| MC | 2048.0 | — | 740.6 | 0.543 Rank: 3/87 |
0.901 Rank: 26/87 |
0.20760 (±0.00000) Rank: 73/87 |
0.33323 (±0.00000) Rank: 74/87 |
| MR | 2048.0 | — | 457.3 | 0.435 Rank: 18/87 |
0.850 Rank: 68/87 |
0.18464 (±0.00000) Rank: 71/87 |
0.26208 (±0.00000) Rank: 73/87 |
| PSM | 2048.0 | — | 266.1 | 0.370 Rank: 13/87 |
0.625 Rank: 12/87 |
0.05585 (±0.00000) Rank: 78/87 |
0.11305 (±0.00000) Rank: 78/87 |
| SF | 2046.8 | — | 376.1 | 0.372 Rank: 41/87 |
0.721 Rank: 72/87 |
0.27543 (±0.00000) Rank: 74/87 |
0.37921 (±0.00000) Rank: 75/87 |
| SPC | 2041.0 | — | 683.6 | 0.467 Rank: 6/87 |
0.830 Rank: 19/87 |
0.32576 (±0.00000) Rank: 63/87 |
0.49662 (±0.00000) Rank: 58/87 |
| Avg | 2046.8 | — | 520.7 | 0.448 Rank: 9/87 |
0.781 Rank: 48/87 |
0.23055 (±0.00000) Rank: 72/87 |
0.33775 (±0.00000) Rank: 72/87 |
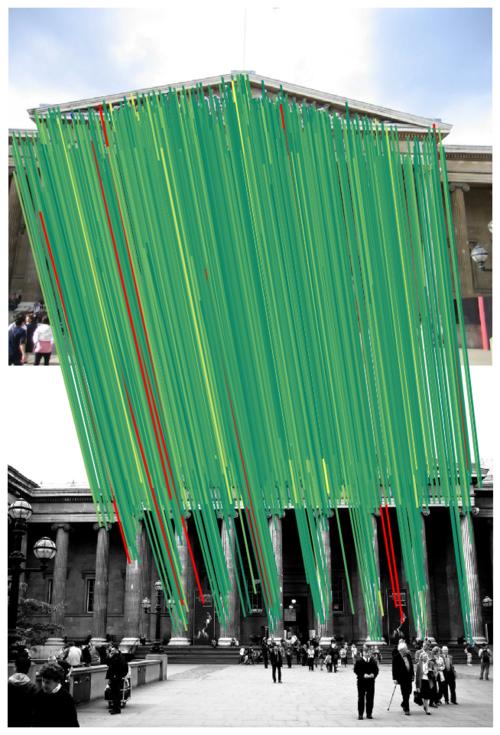
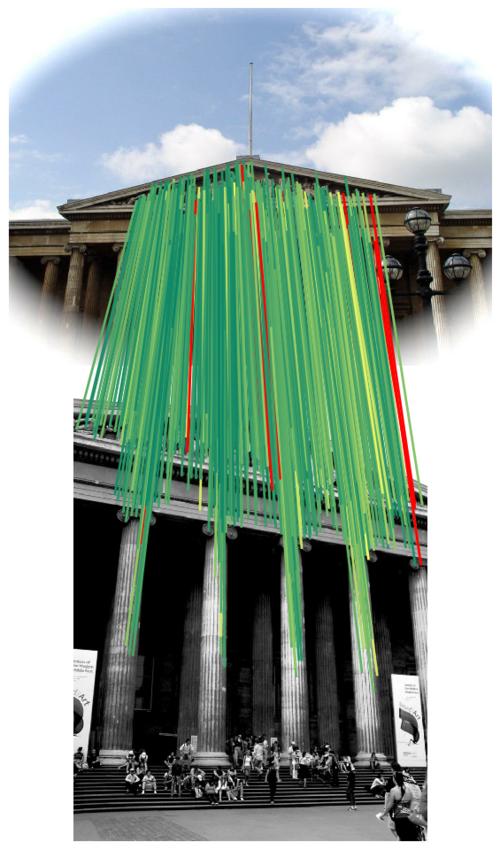
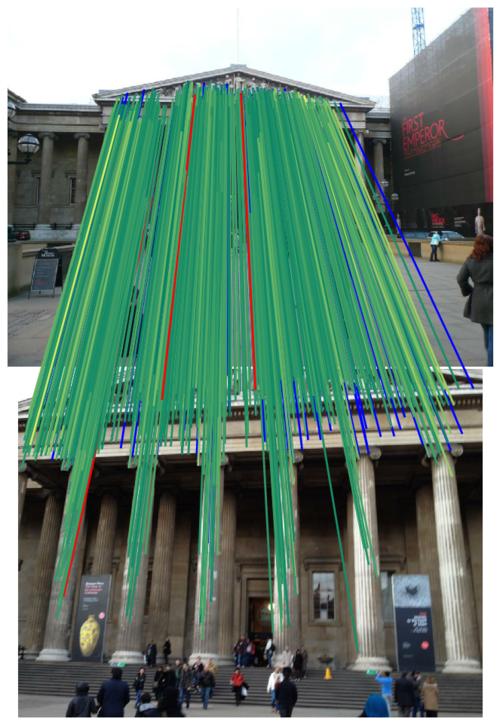
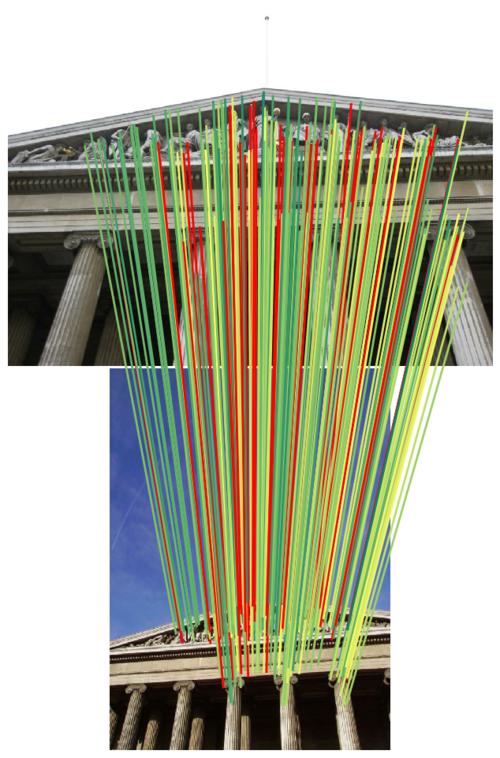
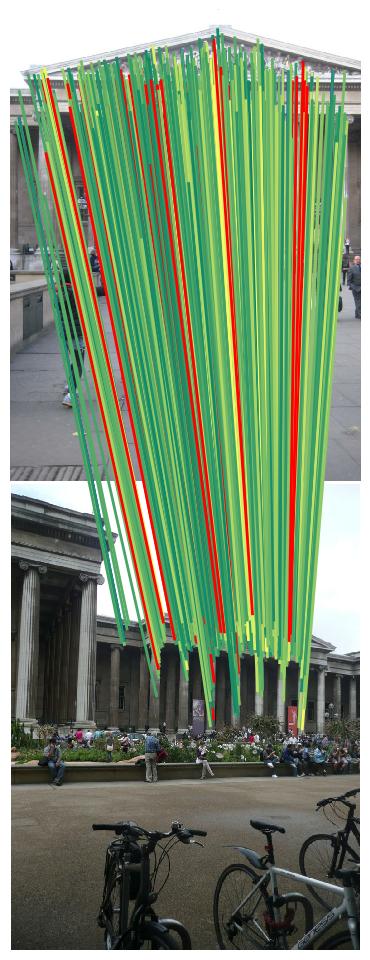
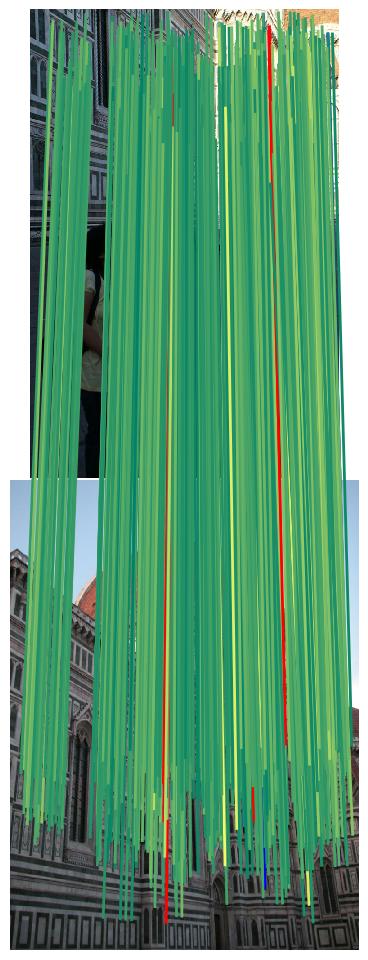
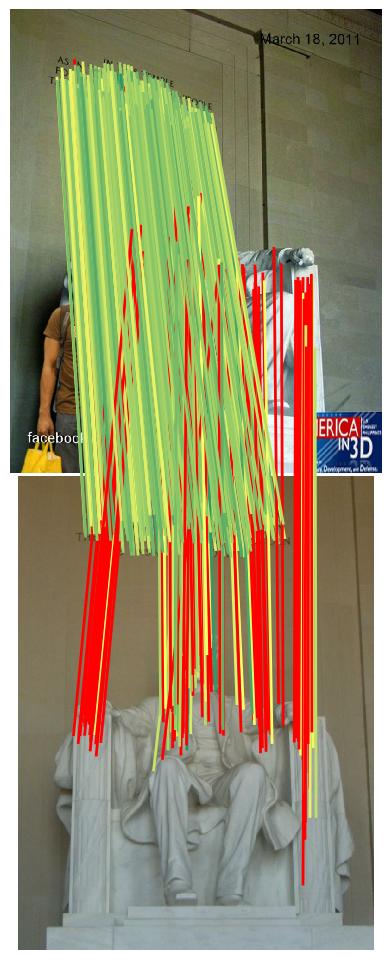
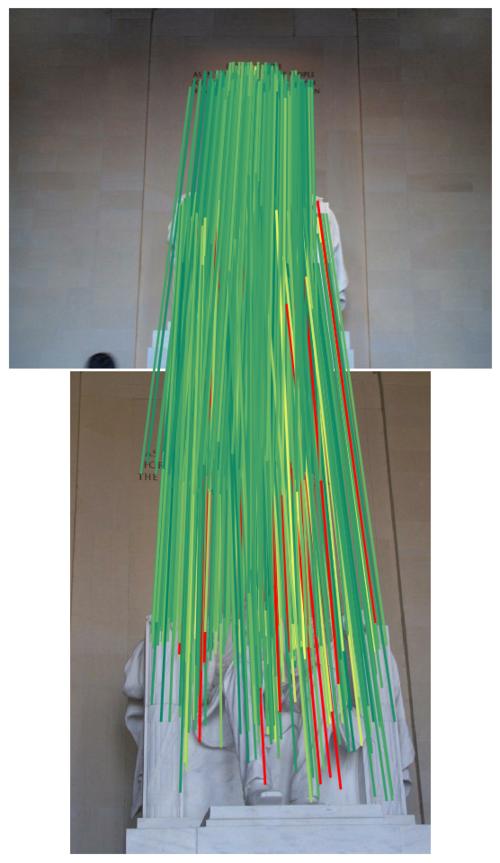
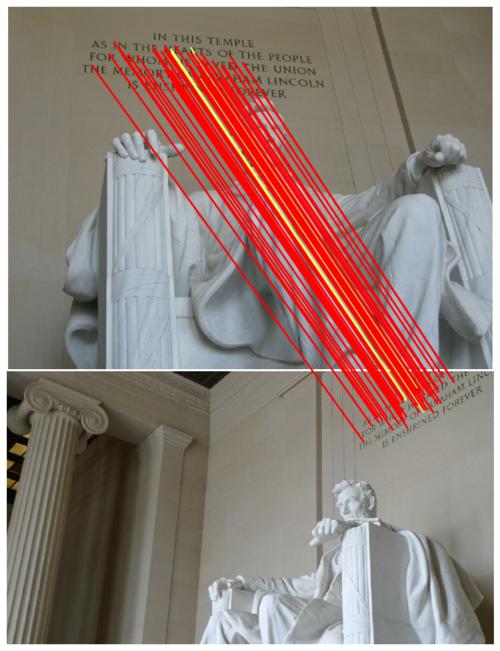
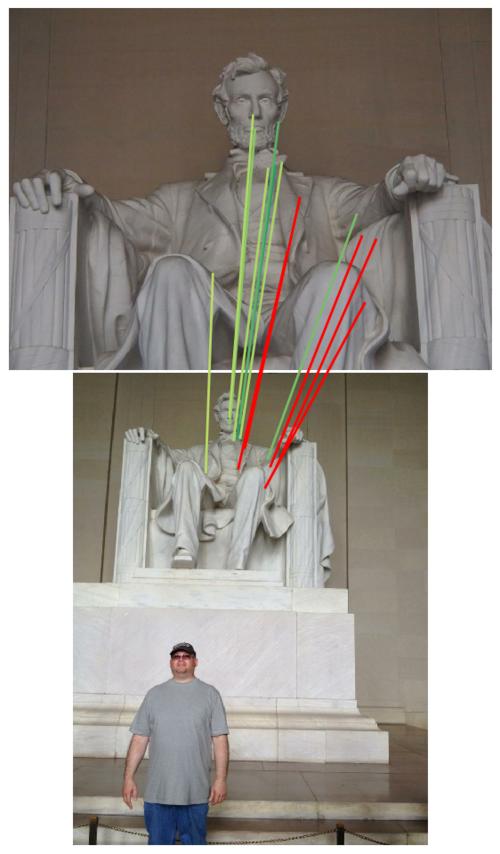
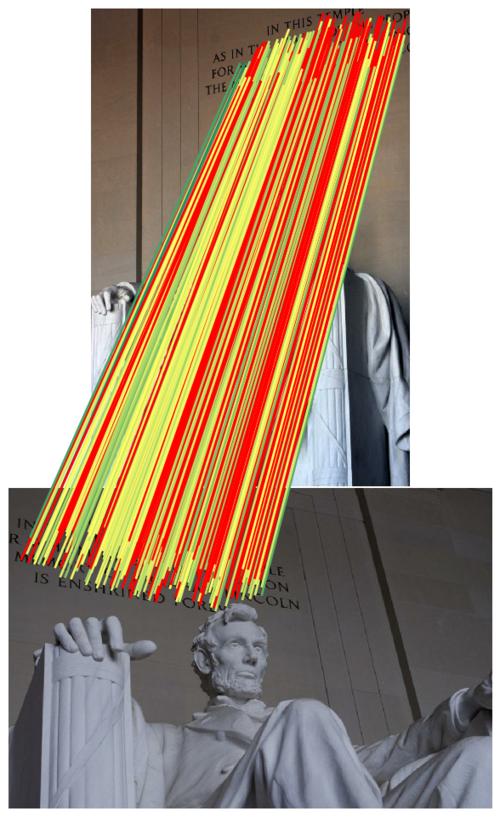
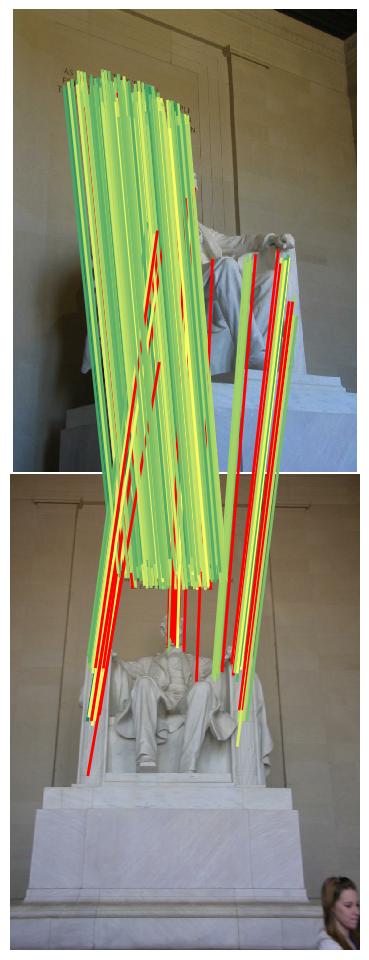
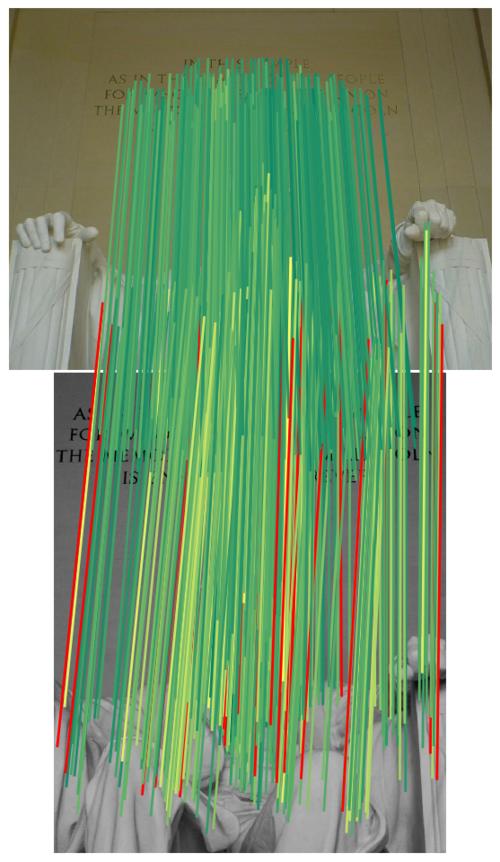
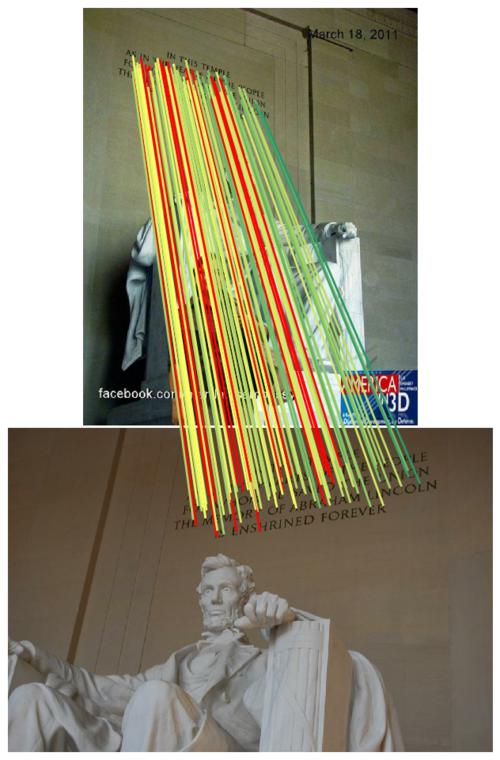
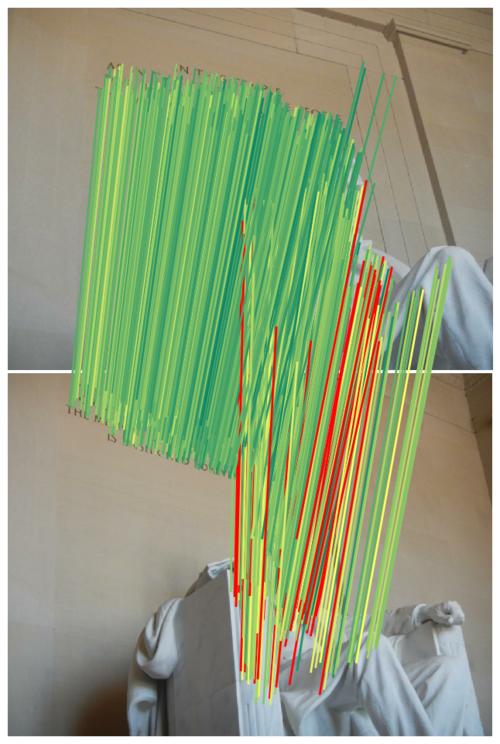
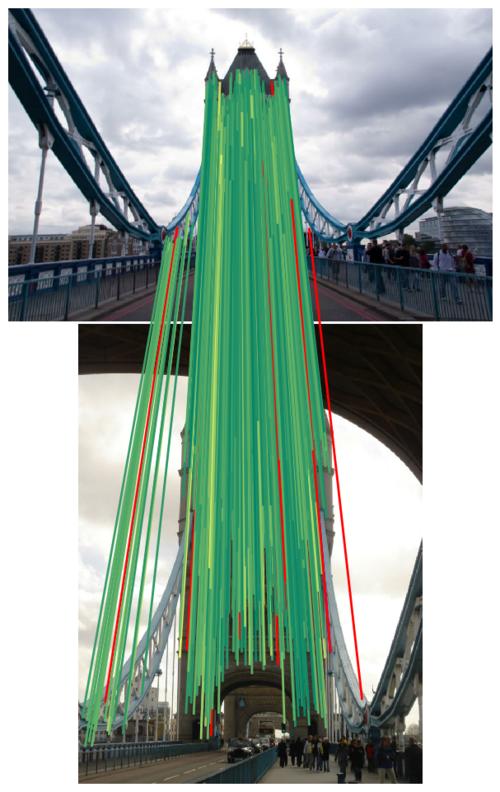
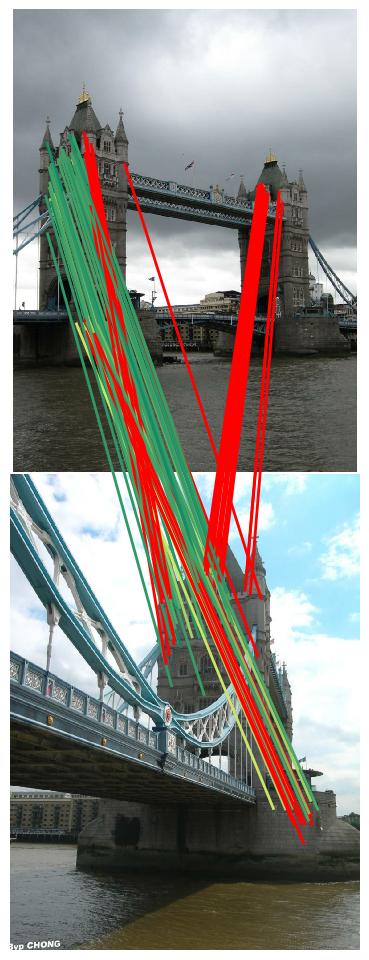
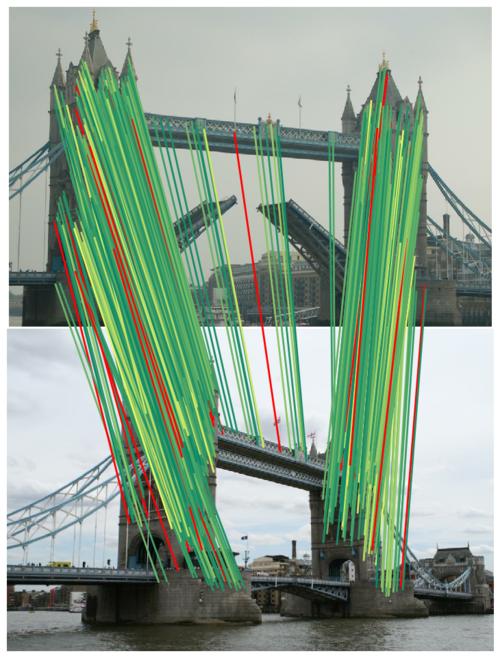
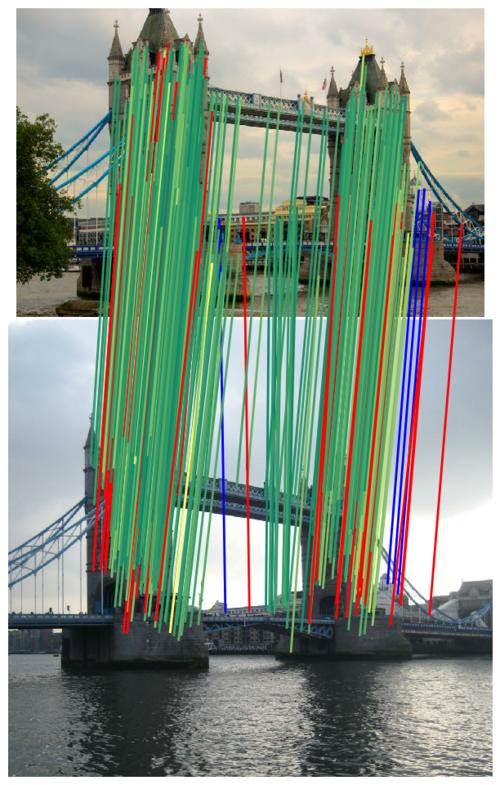
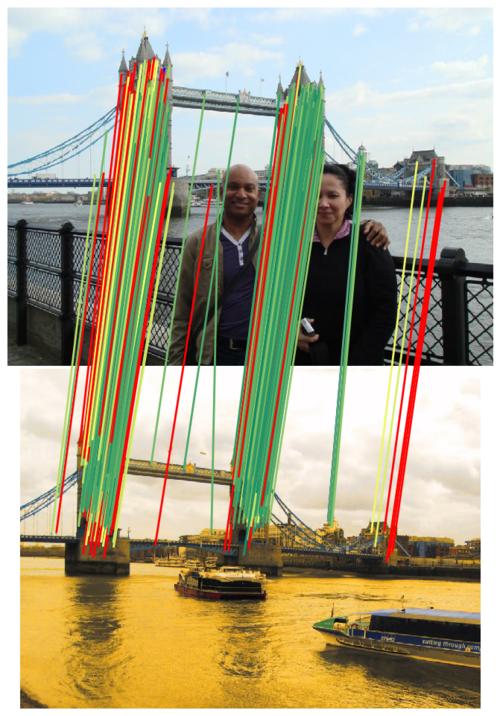
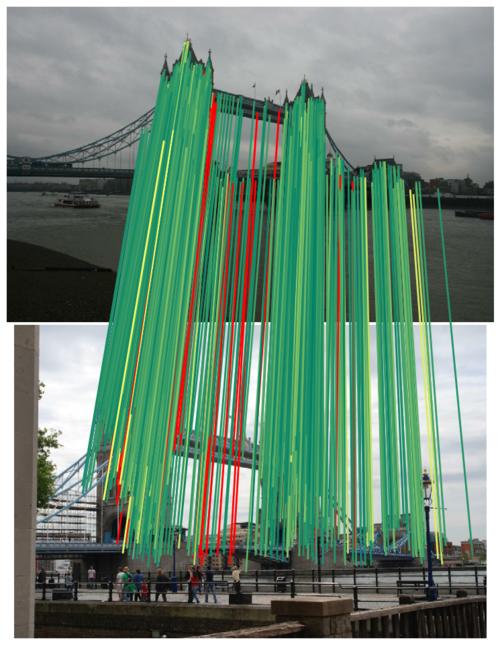
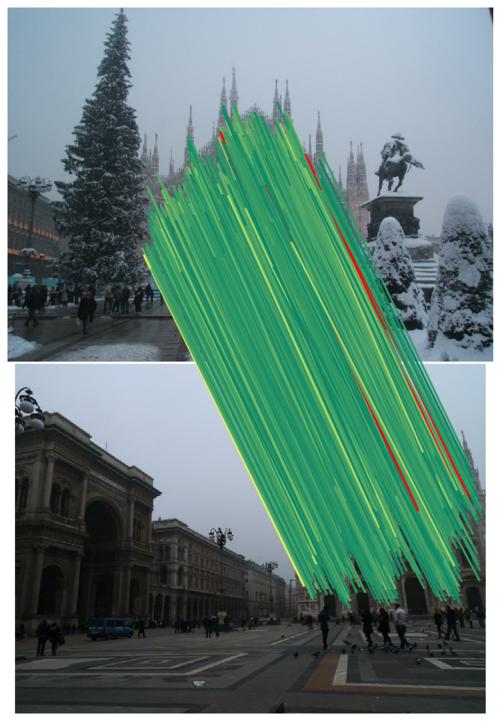
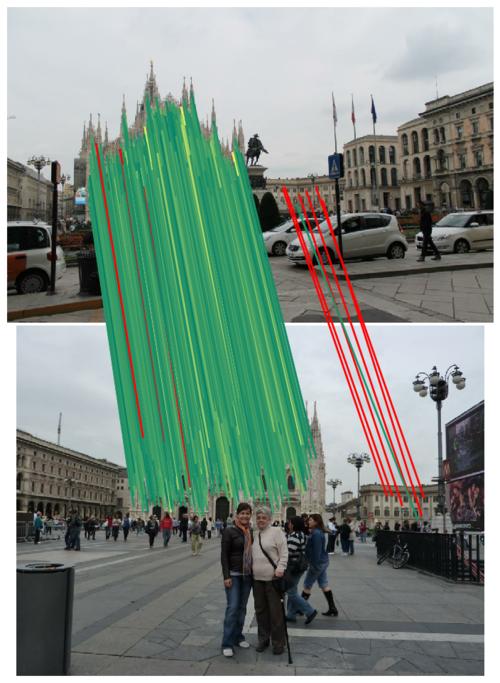
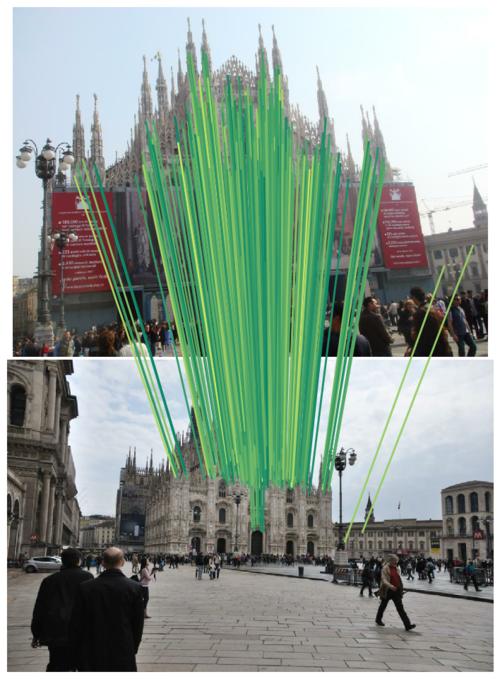
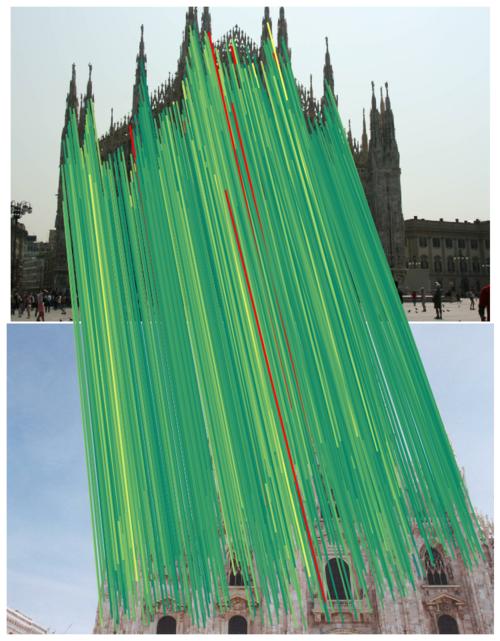
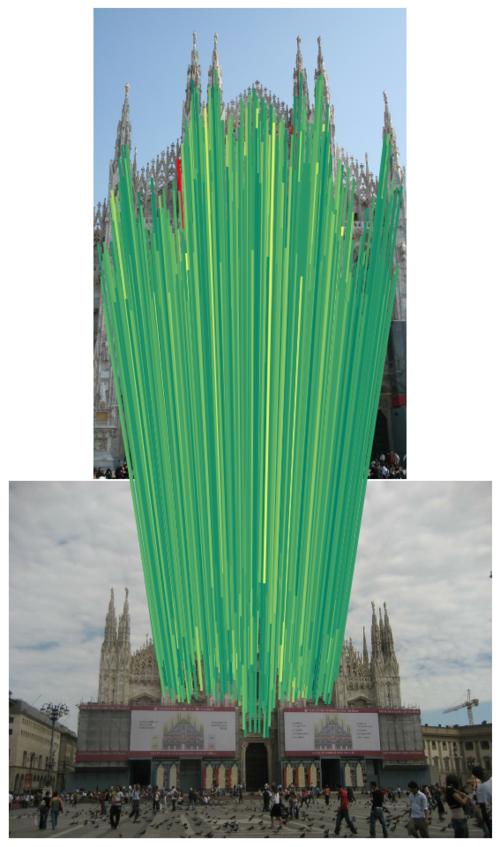
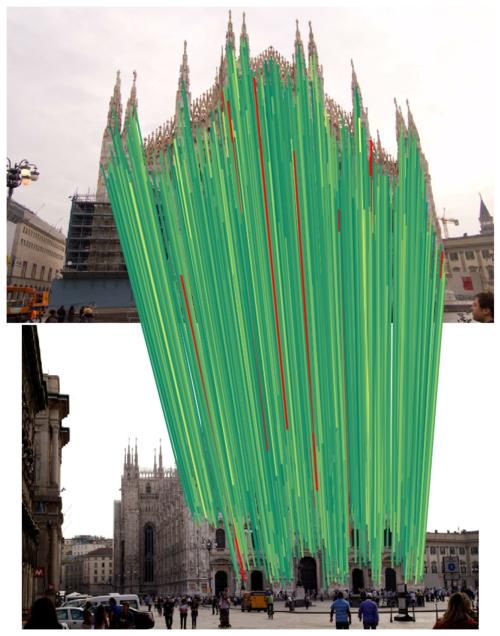
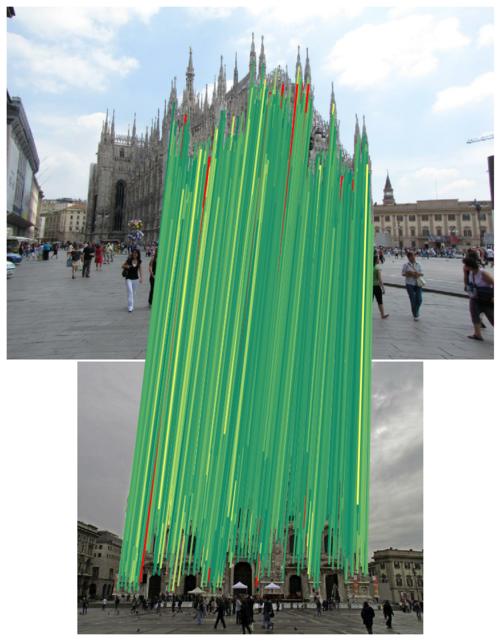
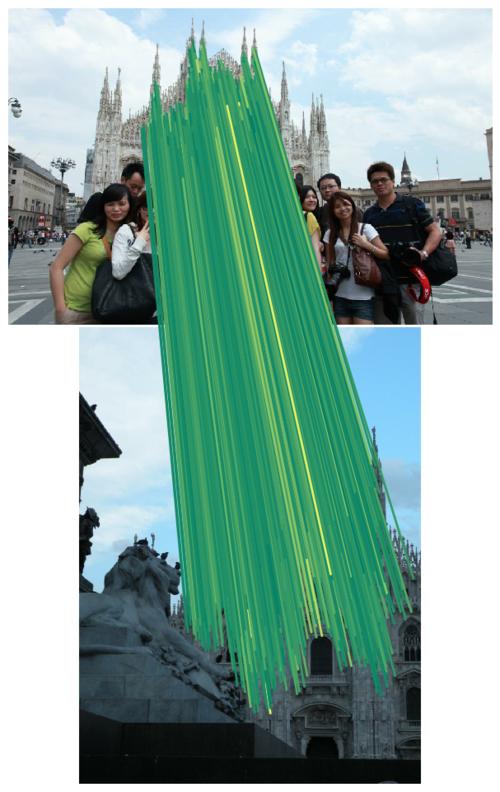
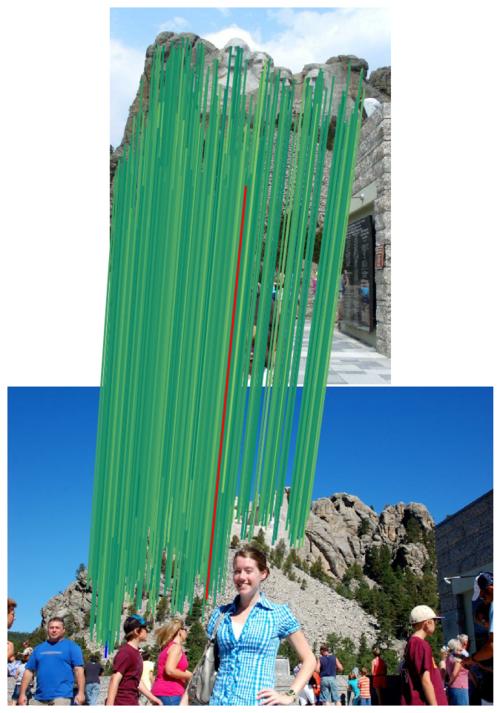
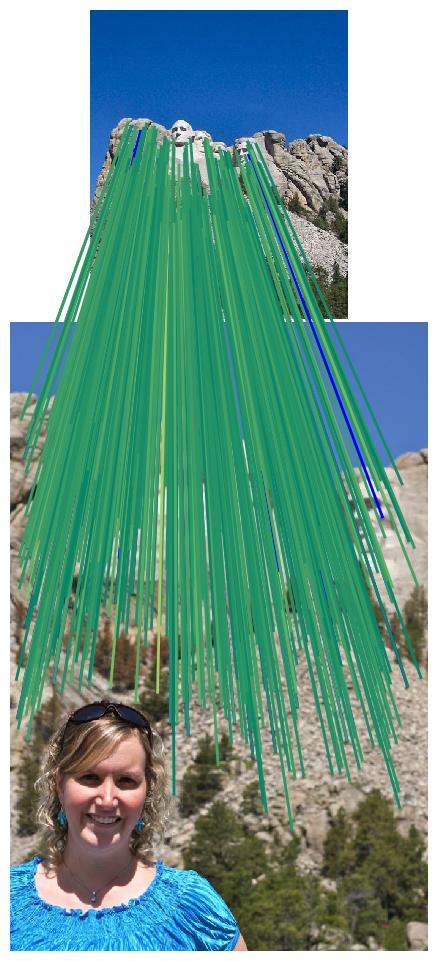
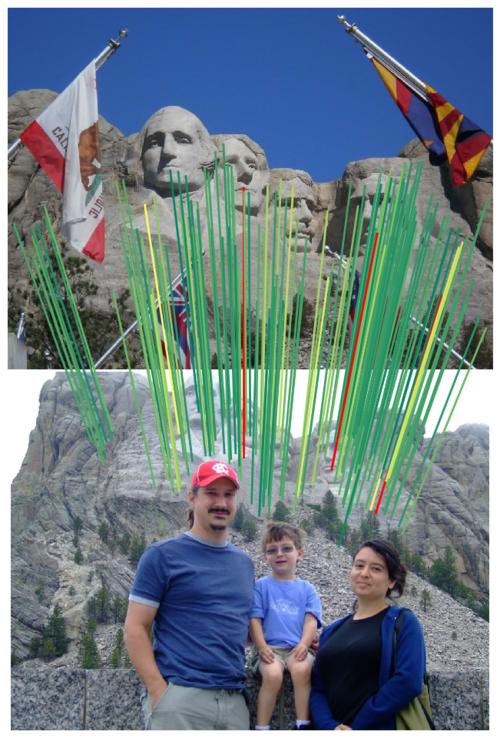
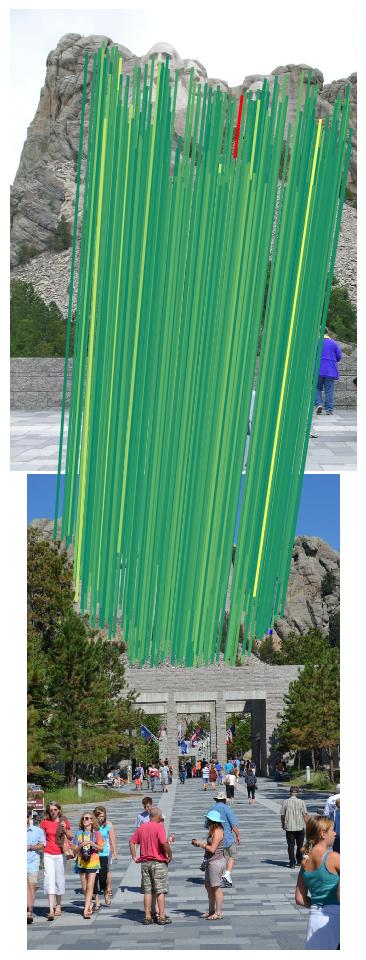
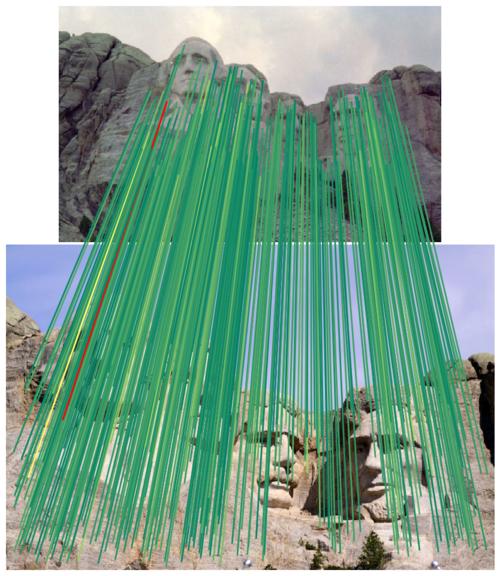
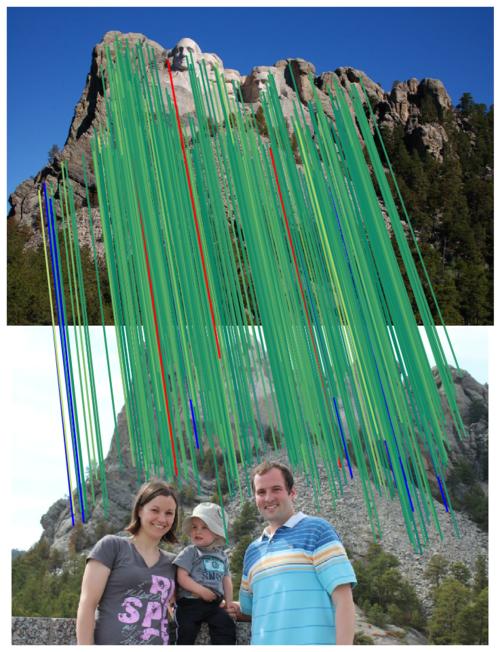
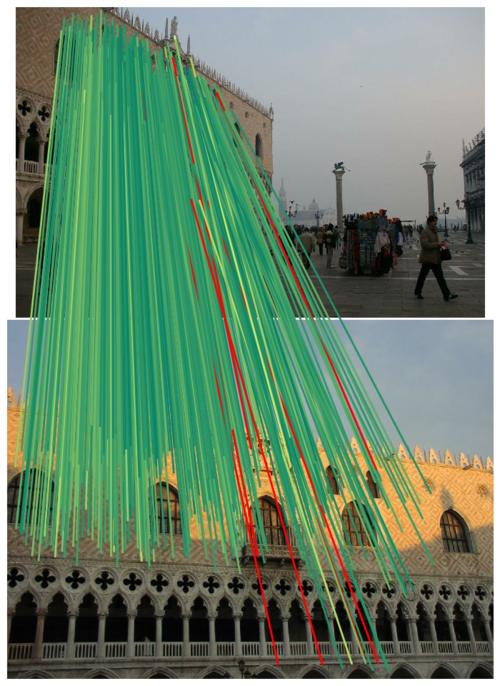
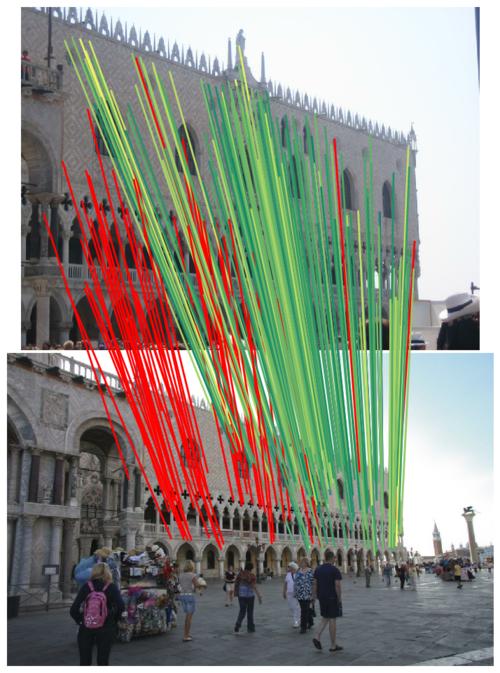
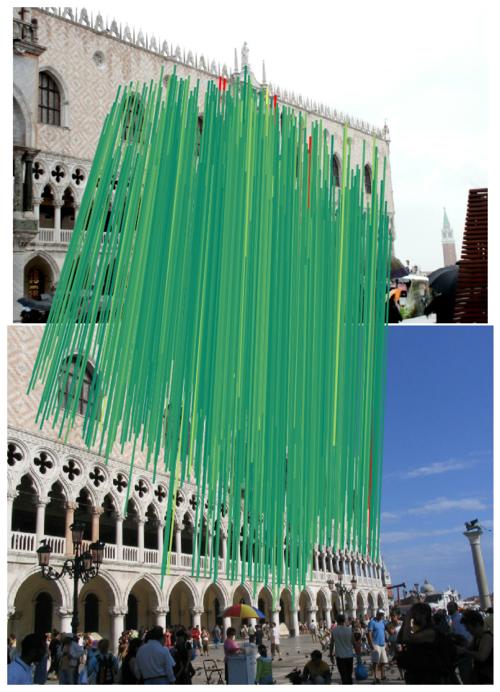
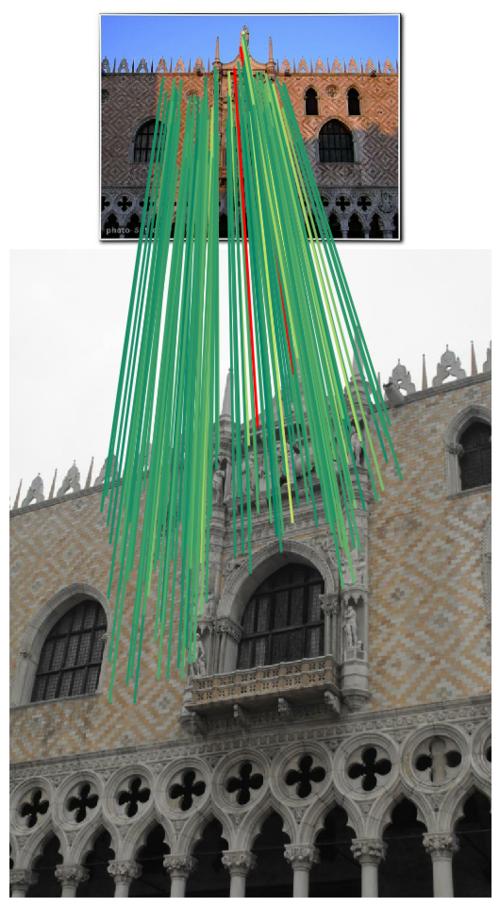
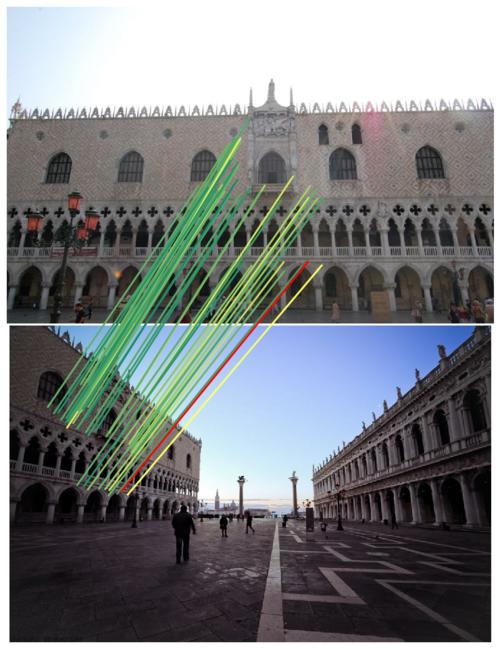
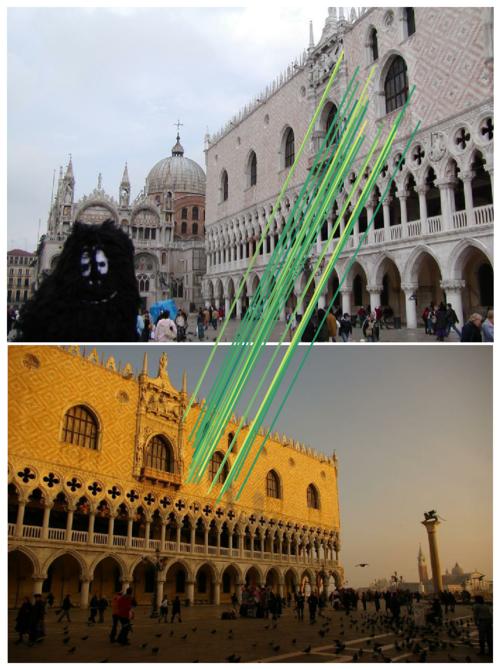
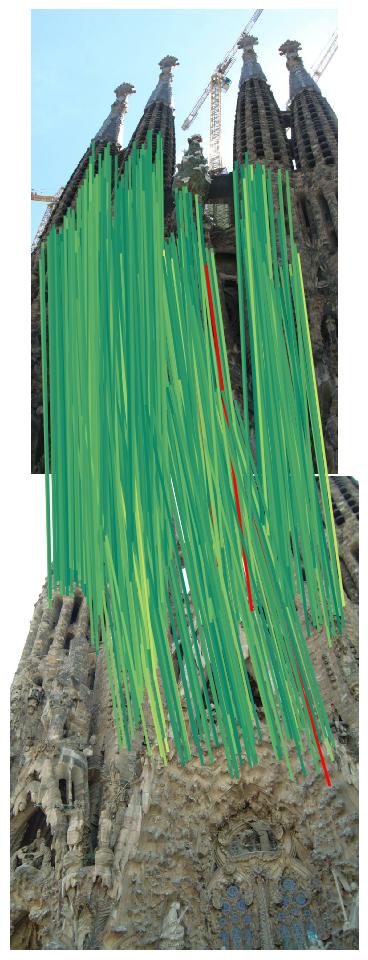
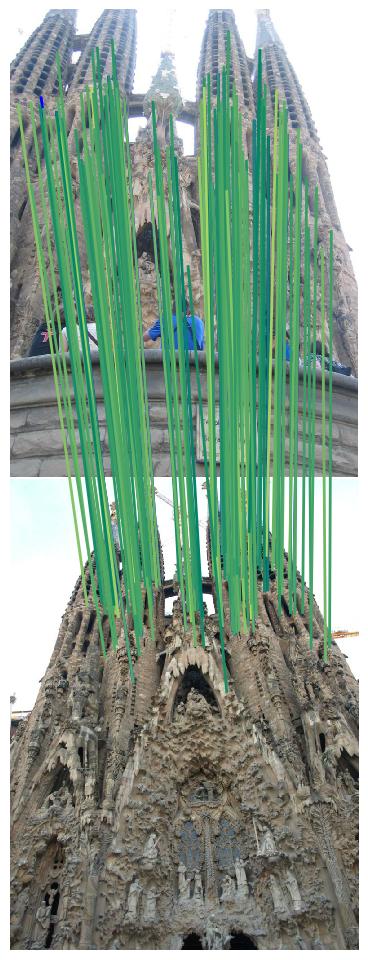
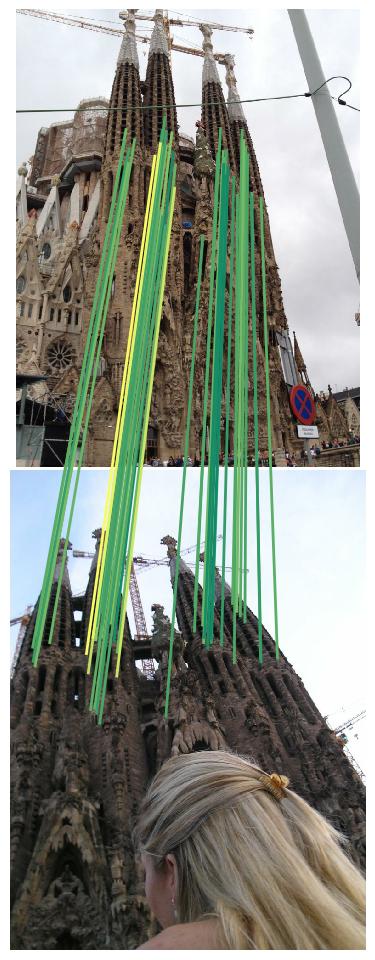
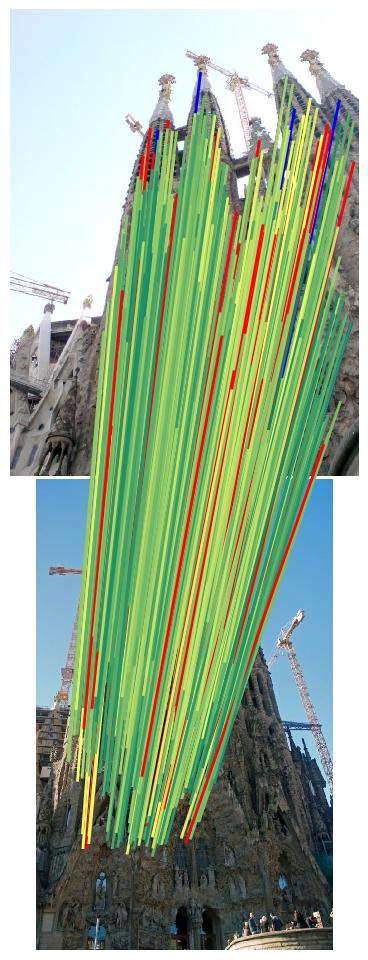
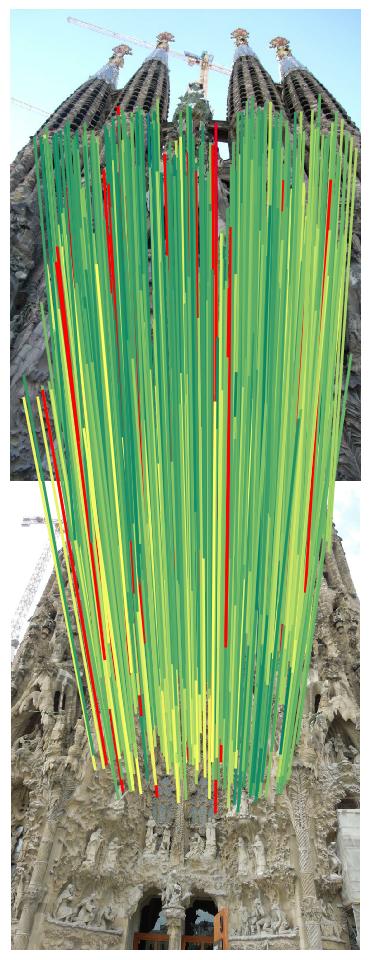
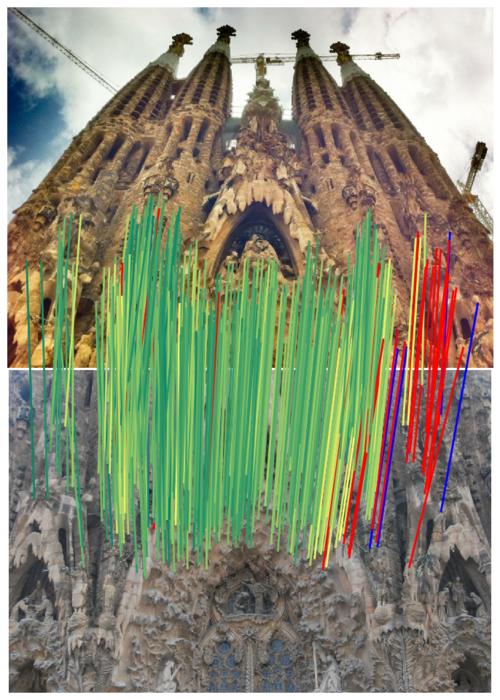
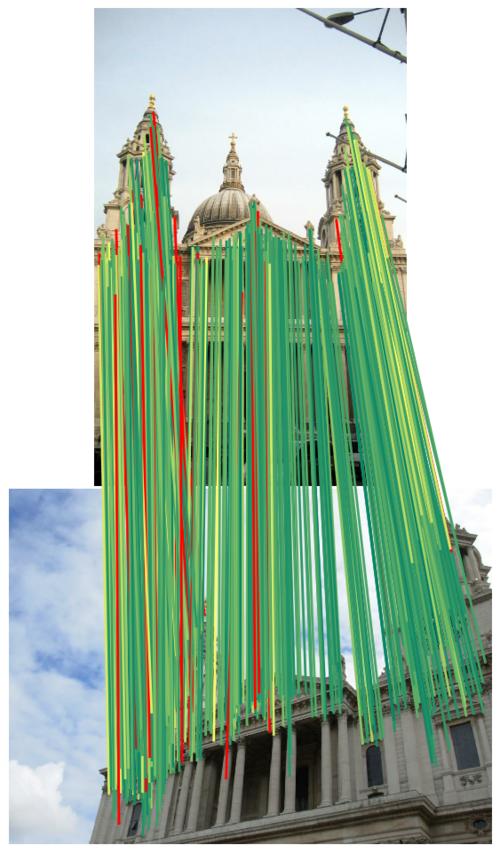
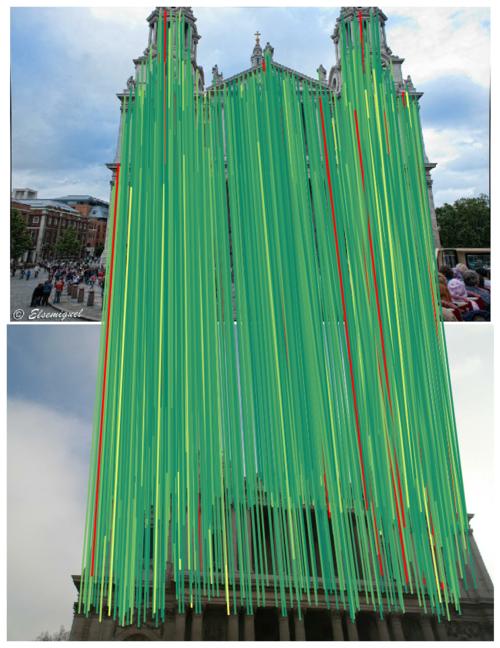
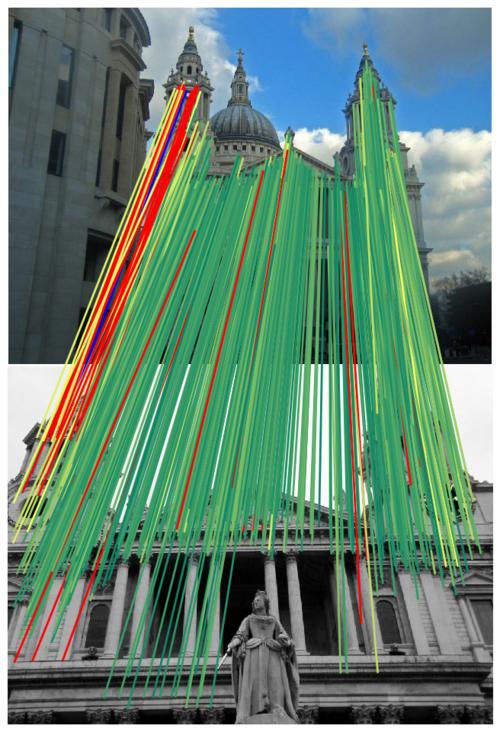
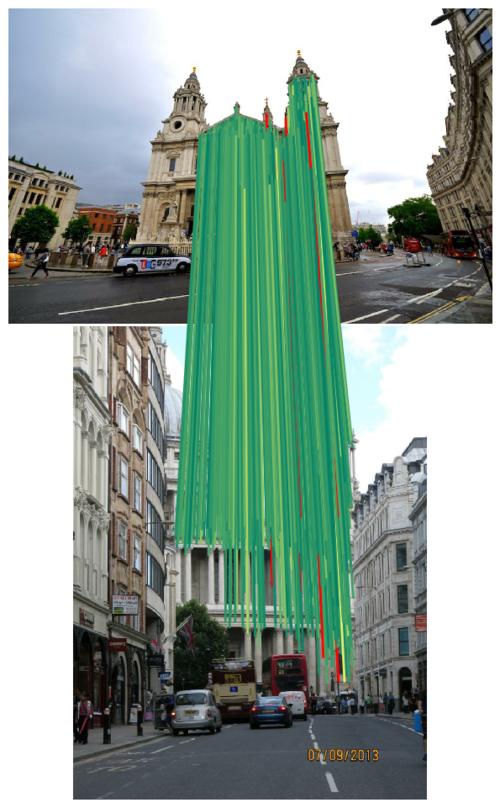
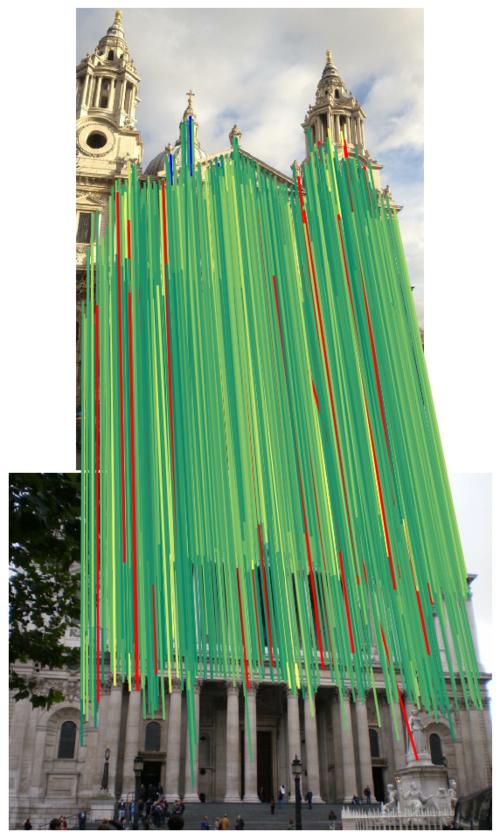
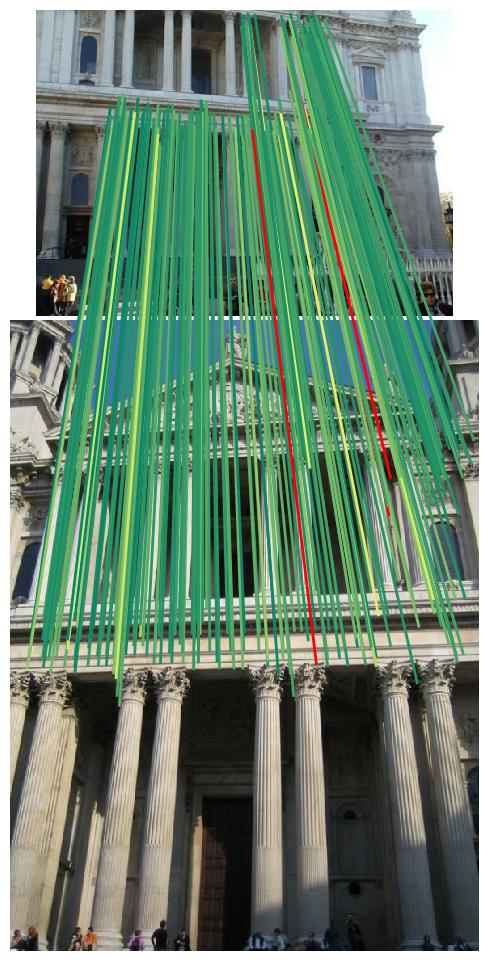
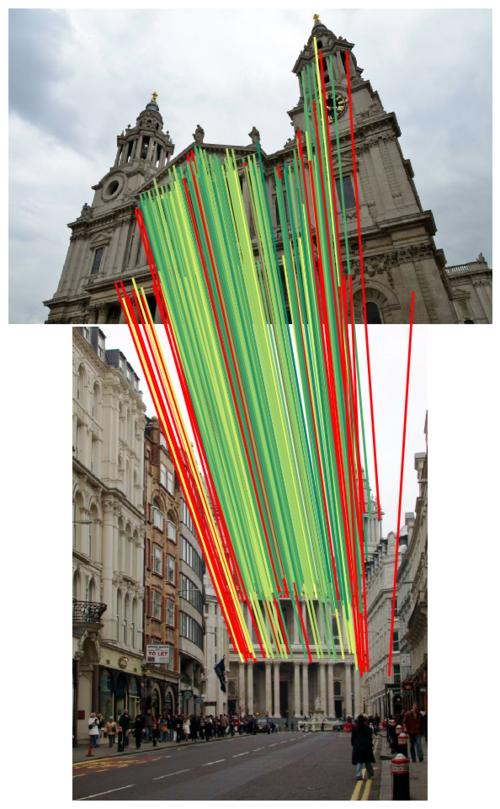
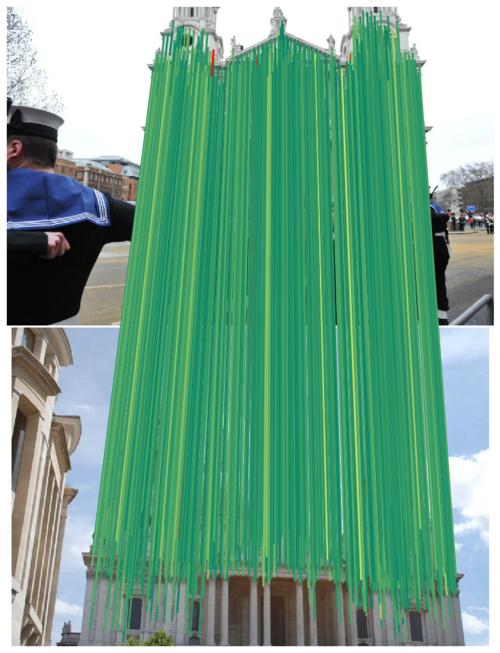
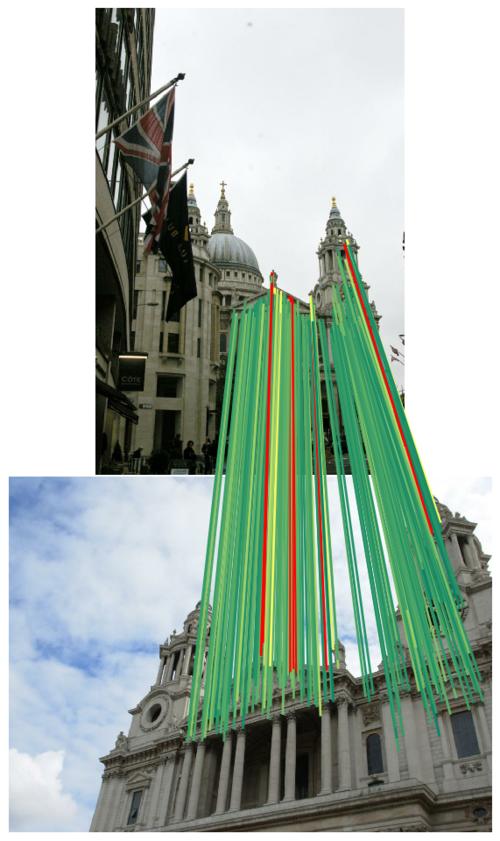
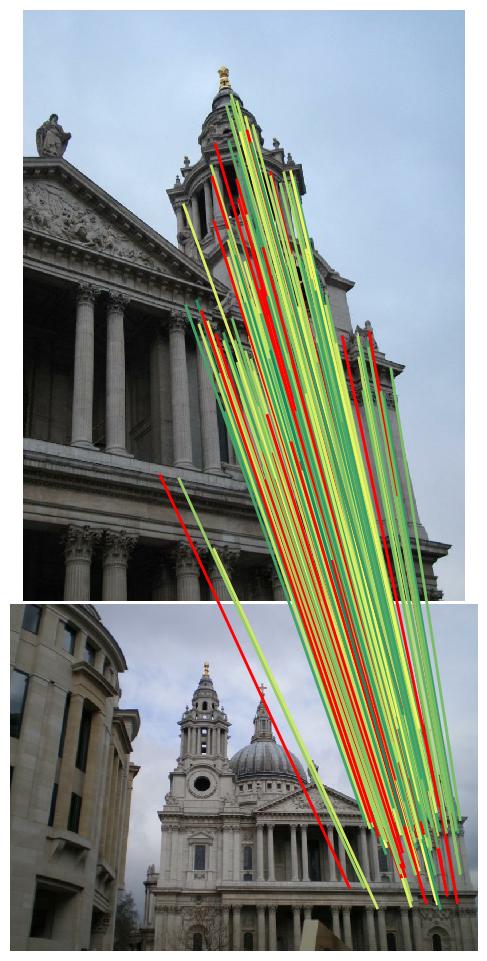
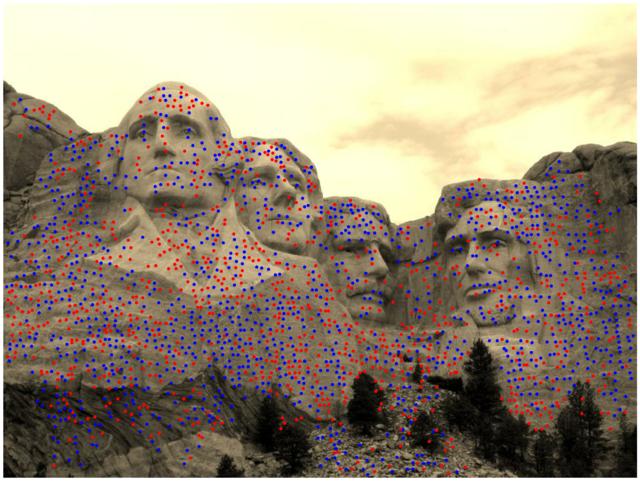
We show the inliers that survive the robust estimation loop (i.e. RANSAC), or those supplied with the submission if using custom matches, and use the depth estimates to determine whether they are correct. We draw matches above a 5-pixel error threshold in red, and those below are color-coded by their error, from 0 (green) to 5 pixels (yellow). Matches for which we do not have depth estimates are drawn in blue. Please note that the depth maps are estimates and may contain errors.
— British Museum —

— Florence Cathedral Side —

— Lincoln Memorial Statue —
— London Bridge —




— Milan Cathedral —

— Mount Rushmore —
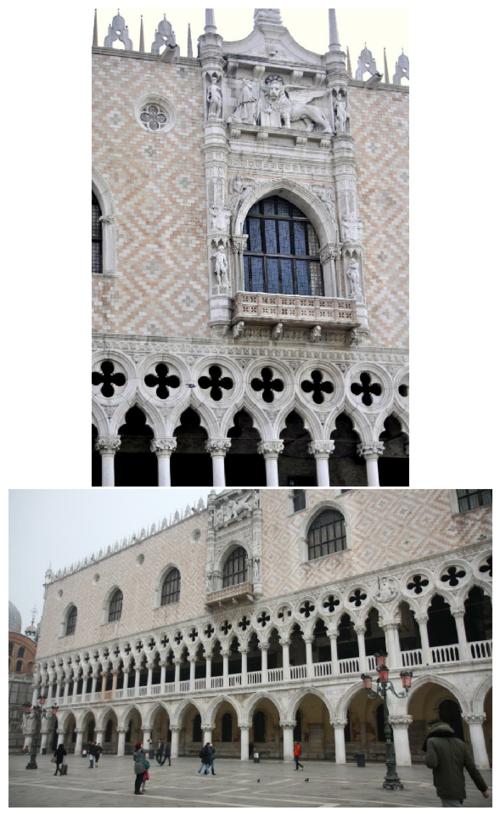
— Piazza San Marco —



— Sagrada Familia —



— Saint Paul's Cathedral —
Phototourism dataset / Multiview track
mAA at 10 degrees: N/A (±0.00000 over 1 run(s) / ±0.10566 over 9 scenes)
Rank (per category): 56 (of 87)
| Scene | Features | Matches (input) |
RegistrationRatio (%) | Number of Landmarks |
Track Length | ATE | mAA(50) | mAA(100) |
| BM | 2048.0 | 838.69 | 99.80 Rank: 49/87 |
2330.31 Rank: 13/87 |
6.792 Rank: 6/87 |
0.48923 Rank: 55/87 |
0.44755 (±0.00000) Rank: 55/87 |
0.60797 (±0.00000) Rank: 56/87 |
| FCS | 2048.0 | 449.71 | 97.27 Rank: 50/87 |
2479.68 Rank: 44/87 |
5.214 Rank: 9/87 |
0.28403 Rank: 66/87 |
0.68783 (±0.00000) Rank: 65/87 |
0.75934 (±0.00000) Rank: 64/87 |
| LMS | 2048.0 | 457.77 | 98.88 Rank: 60/87 |
2190.08 Rank: 18/87 |
5.560 Rank: 35/87 |
0.37917 Rank: 75/87 |
0.77412 (±0.00000) Rank: 69/87 |
0.84020 (±0.00000) Rank: 69/87 |
| LB | 2045.5 | 560.61 | 97.57 Rank: 61/87 |
2009.63 Rank: 37/87 |
5.999 Rank: 7/87 |
0.46313 Rank: 5/87 |
0.67413 (±0.00000) Rank: 51/87 |
0.77524 (±0.00000) Rank: 51/87 |
| MC | 2048.0 | 729.01 | 99.80 Rank: 51/87 |
2504.36 Rank: 15/87 |
6.399 Rank: 4/87 |
0.35978 Rank: 37/87 |
0.51781 (±0.00000) Rank: 48/87 |
0.67024 (±0.00000) Rank: 46/87 |
| MR | 2048.0 | 454.01 | 93.49 Rank: 51/87 |
2520.69 Rank: 11/87 |
4.933 Rank: 15/87 |
0.55200 Rank: 54/87 |
0.39224 (±0.00000) Rank: 45/87 |
0.50569 (±0.00000) Rank: 47/87 |
| PSM | 2048.0 | 267.73 | 93.83 Rank: 57/87 |
2384.32 Rank: 38/87 |
4.533 Rank: 32/87 |
0.51879 Rank: 51/87 |
0.52881 (±0.00000) Rank: 48/87 |
0.61117 (±0.00000) Rank: 47/87 |
| SF | 2046.8 | 367.26 | 94.89 Rank: 68/87 |
2510.18 Rank: 45/87 |
5.041 Rank: 24/87 |
0.34771 Rank: 69/87 |
0.65227 (±0.00000) Rank: 69/87 |
0.73944 (±0.00000) Rank: 70/87 |
| SPC | 2041.0 | 701.20 | 100.00 Rank: 1/87 |
2627.13 Rank: 3/87 |
5.971 Rank: 6/87 |
0.39010 Rank: 1/87 |
0.72406 (±0.00000) Rank: 40/87 |
0.82326 (±0.00000) Rank: 40/87 |
| Avg | 2046.8 | 536.22 | 97.28 Rank: 59/87 |
2395.15 Rank: 24/87 |
5.605 Rank: 8/87 |
0.42044 Rank: 53/87 |
0.59987 (±0.00000) Rank: 56/87 |
0.70362 (±0.00000) Rank: 56/87 |
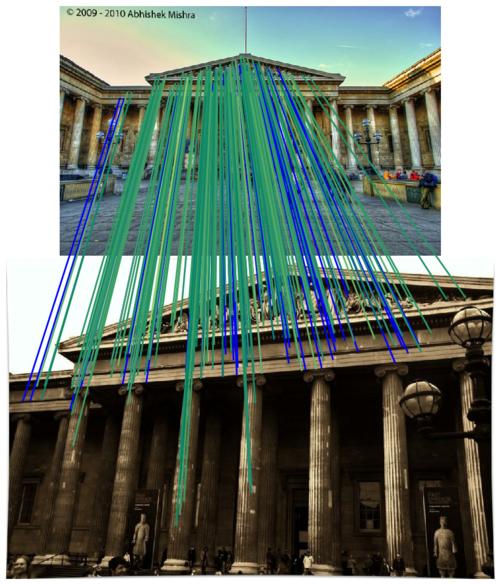
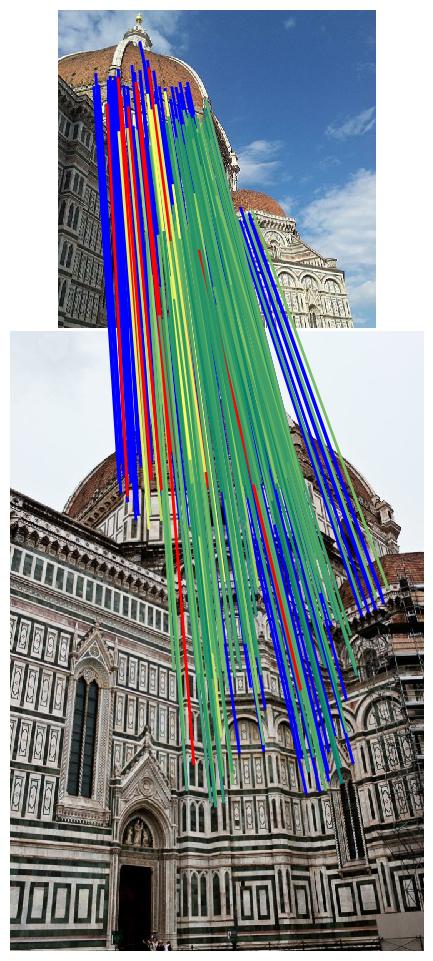
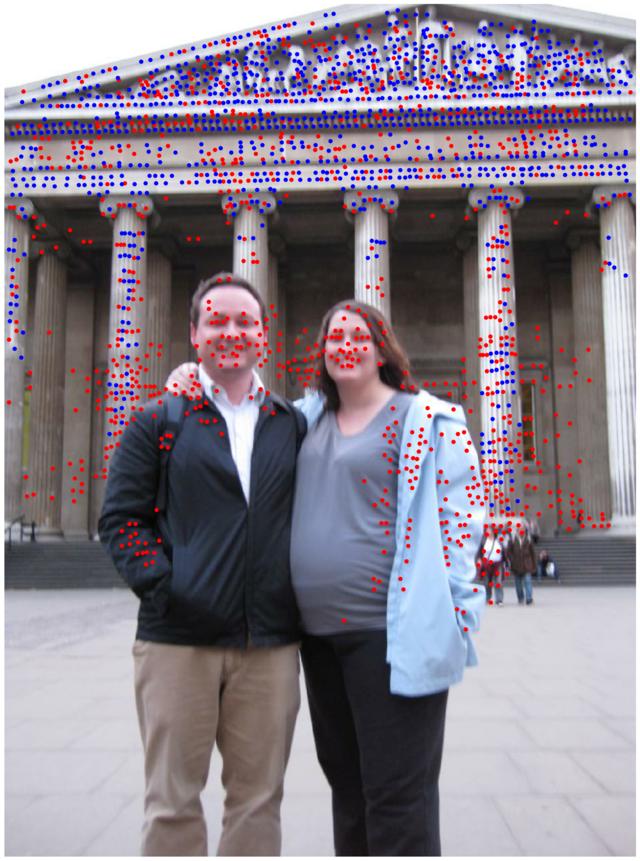
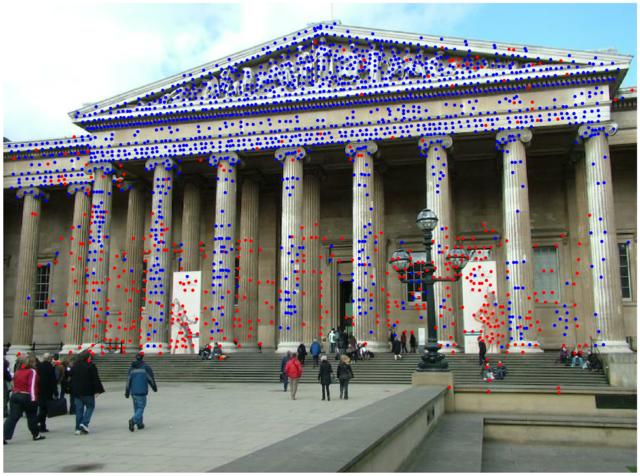
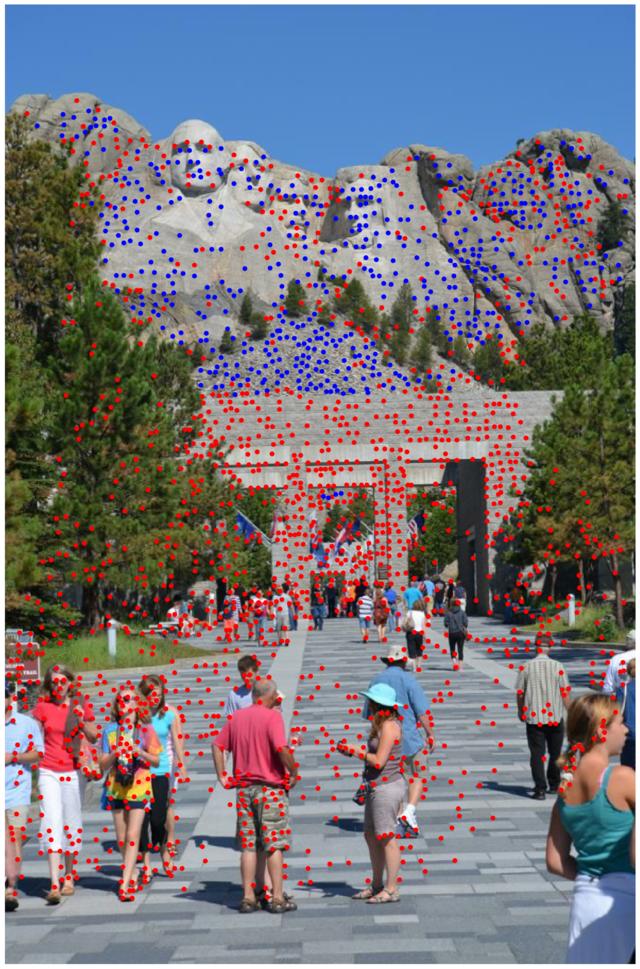
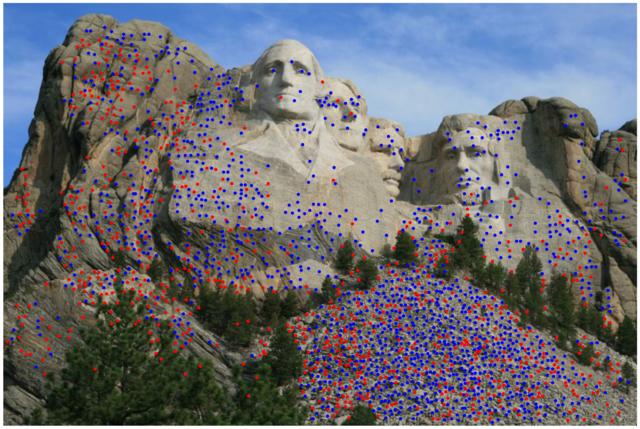
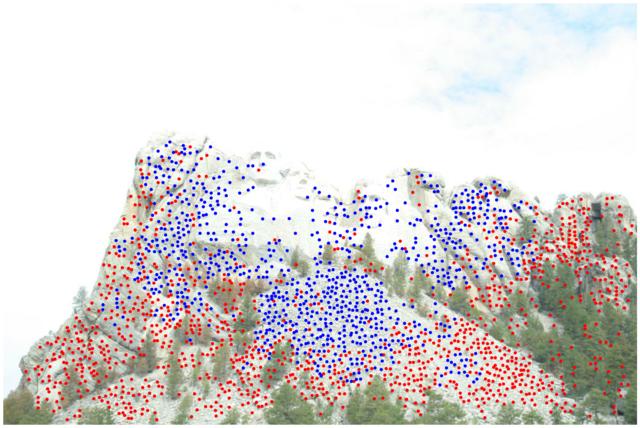
In the multi-view track we reconstruct the scene with Structure-from-Motion (Colmap) with small sets of images. We show the results for one bag of 10 images. Keypoints are drawn in blue if they are part of the model, and in red otherwise.
— British Museum —








— Florence Cathedral Side —





— Lincoln Memorial Statue —

— London Bridge —










— Milan Cathedral —









— Mount Rushmore —


— Piazza San Marco —









— Sagrada Familia —




— Saint Paul's Cathedral —










Prague Parks dataset / Stereo track
mAA at 10 degrees: 0.26770 (±0.00000 over 1 run(s) / ±0.02111 over 3 scenes)
Rank (per category): 70 (of 87)
| Scene | Features | Matches (raw) |
Matches (final) |
Rep. @ 3 px. | MS @ 3 px. | mAA(5o) | mAA(10o) |
| Lizard | 2048.0 | — | 143.5 | 0.045 Rank: 7/87 |
0.005 Rank: 69/87 |
0.17365 (±0.00000) Rank: 69/87 |
0.24535 (±0.00000) Rank: 70/87 |
| Pond | 2048.0 | — | 186.9 | 0.075 Rank: 6/87 |
0.054 Rank: 14/87 |
0.17996 (±0.00000) Rank: 70/87 |
0.26172 (±0.00000) Rank: 70/87 |
| Tree | 2048.0 | — | 106.1 | 0.049 Rank: 4/87 |
0.018 Rank: 65/87 |
0.21015 (±0.00000) Rank: 69/87 |
0.29603 (±0.00000) Rank: 69/87 |
| Avg | 2048.0 | — | 145.5 | 0.056 Rank: 6/87 |
0.026 Rank: 61/87 |
0.18792 (±0.00000) Rank: 69/87 |
0.26770 (±0.00000) Rank: 70/87 |
We show the inliers that survive the robust estimation loop (i.e. RANSAC), or those supplied with the submission if using custom matches, and use the depth estimates to determine whether they are correct. We draw matches above a 5-pixel error threshold in red, and those below are color-coded by their error, from 0 (green) to 5 pixels (yellow). Matches for which we do not have depth estimates are drawn in blue. Please note that the depth maps are estimates and may contain errors.
— Lizard —



— Pond —


— Tree —







Prague Parks dataset / Multiview track
mAA at 10 degrees: N/A (±0.00000 over 1 run(s) / ±0.11801 over 3 scenes)
Rank (per category): 65 (of 87)
| Scene | Features | Matches (input) |
RegistrationRatio (%) | Number of Landmarks |
Track Length | ATE | mAA(50) | mAA(100) |
| Lizard | 2048.0 | 192.64 | 81.00 Rank: 64/87 |
639.54 Rank: 59/87 |
3.238 Rank: 60/87 |
13.58700 Rank: 11/87 |
0.45000 (±0.00000) Rank: 64/87 |
0.54234 (±0.00000) Rank: 64/87 |
| Pond | 2048.0 | 307.02 | 69.43 Rank: 19/87 |
882.90 Rank: 37/87 |
3.098 Rank: 9/87 |
0.41883 Rank: 18/87 |
0.23916 (±0.00000) Rank: 60/87 |
0.28198 (±0.00000) Rank: 53/87 |
| Tree | 2048.0 | 167.46 | 69.00 Rank: 63/87 |
434.53 Rank: 52/87 |
2.984 Rank: 34/87 |
5.75647 Rank: 12/87 |
0.27524 (±0.00000) Rank: 66/87 |
0.30343 (±0.00000) Rank: 66/87 |
| Avg | 2048.0 | 222.37 | 73.14 Rank: 62/87 |
652.32 Rank: 53/87 |
3.106 Rank: 25/87 |
6.58743 Rank: 10/87 |
0.32147 (±0.00000) Rank: 64/87 |
0.37592 (±0.00000) Rank: 65/87 |
In the multi-view track we reconstruct the scene with Structure-from-Motion (Colmap) with small sets of images. We show the results for one bag of 10 images. Keypoints are drawn in blue if they are part of the model, and in red otherwise.
— Lizard —



— Pond —






— Tree —









Google Urban dataset / Stereo track
mAA at 10 degrees: 0.00000 (±0.00000 over 1 run(s) / ±0.00000 over 17 scenes)
Rank (per category): 53 (of 87)
| Scene | Features | Matches (raw) |
Matches (final) |
mAA(5o) | mAA(10o) |
| Amsterdam (AMS) | 2048.0 | — | 399.2 | 0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| Bangkok (BGK) | 2048.0 | — | 540.2 | 0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| Barcelona (BCN) | 2048.0 | — | 258.1 | 0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| Buenos Aires (BAR) | 2048.0 | — | 345.4 | 0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| Cambridge (CAM) | 2045.0 | — | 309.2 | 0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| Cannes (CAN) | 2048.0 | — | 410.6 | 0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| Chicago (CHI) | 2042.9 | — | 130.0 | 0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| Helsinki (HEL) | 2048.0 | — | 563.5 | 0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| Madrid (MAD) | 2048.0 | — | 235.7 | 0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| Mountain View (MTV) | 2048.0 | — | 243.9 | 0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| New Orleans (NOR) | 2048.0 | — | 215.0 | 0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| San Francisco (SF) | 2048.0 | — | 278.0 | 0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| Singapore (SG) | 2042.4 | — | 277.4 | 0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| Sydney (SYD) | 2048.0 | — | 258.7 | 0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| Tokyo (TOK) | 2048.0 | — | 331.3 | 0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| Toronto (TOR) | 2048.0 | — | 160.2 | 0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| Zurich (ZRH) | 2048.0 | — | 309.1 | 0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| Average (Avg) | 2047.2 | — | 309.7 | 0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
We show the inliers that survive the robust estimation loop (i.e. RANSAC), or those supplied with the submission if using custom matches. As the dataset does not contain depth, we color them based on the symmetric epopilar distance on normalized coordinates: from 0 (green) to 2e-4 (yellow), and in red above it. Note that these occasionally contain false positives.
— Amsterdam —




— Bangkok —



— Barcelona —


— Buenos Aires —



— Cambridge —




— Cannes —




— Chicago —


— Helsinki —


— Madrid —





— Mountain View —







— New Orleans —






— San Francisco —




— Singapore —








— Sydney —





— Tokyo —




— Toronto —



— Zurich —




Google Urban dataset / Multiview track
mAA at 10 degrees: N/A (±0.00000 over 1 run(s) / ±0.00000 over 17 scenes)
Rank (per category): 53 (of 87)
| Scene | Features | Matches (input) |
RegistrationRatio (%) | Number of Landmarks |
Track Length | ATE | mAA(50) | mAA(100) |
| AMS | 2048.0 | 221.66 | 0.00 Rank: 53/87 |
0.00 Rank: 53/87 |
0.000 Rank: 53/87 |
nan Rank: 1/87 |
0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| BGK | 2048.0 | 342.06 | 0.00 Rank: 53/87 |
0.00 Rank: 53/87 |
0.000 Rank: 53/87 |
nan Rank: 1/87 |
0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| BCN | 2048.0 | 142.57 | 0.00 Rank: 53/87 |
0.00 Rank: 53/87 |
0.000 Rank: 53/87 |
nan Rank: 1/87 |
0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| BAR | 2048.0 | 179.88 | 0.00 Rank: 53/87 |
0.00 Rank: 53/87 |
0.000 Rank: 53/87 |
nan Rank: 1/87 |
0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| CAM | 2045.0 | 173.43 | 0.00 Rank: 53/87 |
0.00 Rank: 53/87 |
0.000 Rank: 53/87 |
nan Rank: 1/87 |
0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| CAN | 2048.0 | 210.95 | 0.00 Rank: 53/87 |
0.00 Rank: 53/87 |
0.000 Rank: 53/87 |
nan Rank: 1/87 |
0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| CHI | 2042.9 | 109.76 | 0.00 Rank: 53/87 |
0.00 Rank: 53/87 |
0.000 Rank: 53/87 |
nan Rank: 1/87 |
0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| HEL | 2048.0 | 393.28 | 0.00 Rank: 53/87 |
0.00 Rank: 53/87 |
0.000 Rank: 53/87 |
nan Rank: 1/87 |
0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| MAD | 2048.0 | 137.60 | 13.33 Rank: 53/87 |
2.00 Rank: 53/87 |
0.667 Rank: 53/87 |
nan Rank: 1/87 |
0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| MTV | 2048.0 | 164.47 | 0.00 Rank: 53/87 |
0.00 Rank: 53/87 |
0.000 Rank: 53/87 |
nan Rank: 1/87 |
0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| NOR | 2048.0 | 135.08 | 0.00 Rank: 53/87 |
0.00 Rank: 53/87 |
0.000 Rank: 53/87 |
nan Rank: 1/87 |
0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| SF | 2048.0 | 160.52 | 0.00 Rank: 53/87 |
0.00 Rank: 53/87 |
0.000 Rank: 53/87 |
nan Rank: 1/87 |
0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| SG | 2042.4 | 163.71 | 0.00 Rank: 53/87 |
0.00 Rank: 53/87 |
0.000 Rank: 53/87 |
nan Rank: 1/87 |
0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| SYD | 2048.0 | 142.13 | 0.00 Rank: 53/87 |
0.00 Rank: 53/87 |
0.000 Rank: 53/87 |
nan Rank: 1/87 |
0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| TOK | 2048.0 | 199.48 | 0.00 Rank: 53/87 |
0.00 Rank: 53/87 |
0.000 Rank: 53/87 |
nan Rank: 1/87 |
0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| TOR | 2048.0 | 82.99 | 0.00 Rank: 53/87 |
0.00 Rank: 53/87 |
0.000 Rank: 53/87 |
nan Rank: 1/87 |
0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| ZRH | 2048.0 | 171.54 | 13.33 Rank: 53/87 |
4.67 Rank: 53/87 |
0.667 Rank: 53/87 |
nan Rank: 1/87 |
0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
| Avg | 2047.2 | 184.18 | 1.57 Rank: 53/87 |
0.39 Rank: 53/87 |
0.078 Rank: 53/87 |
nan Rank: 1/87 |
0.00000 (±0.00000) Rank: 53/87 |
0.00000 (±0.00000) Rank: 53/87 |
In the multi-view track we reconstruct the scene with Structure-from-Motion (Colmap) with small sets of images. We show the results for one bag of 10 images. Keypoints are drawn in blue if they are part of the model, and in red otherwise.
— Amsterdam —



— Bangkok —


— Barcelona —



— Buenos Aires —



— Cambridge —




— Cannes —

— Chicago —

— Helsinki —



— Madrid —



— Mountain View —

— New Orleans —





— San Francisco —

— Singapore —






— Sydney —
— Tokyo —

— Toronto —

— Zurich —