Submission ID: 8074e77f
mss_orien
Processed: 21-06-07. Download link: 8074e77fe54827ca-66_1json.json
This page ranks the submission against all others using the same number of keypoints, regardless of descriptor size. Please hover over table headers for descriptions on metrics and full scene names.
- Phototourism dataset: Stereo track / Multiview track
- Prague Parks dataset: Stereo track / Multiview track
- Google Urban dataset: Stereo track / Multiview track
Metadata
- Authors: Xiaopeng Bi, Yu Chen, Xinyang Liu, Dehao Zhang, Ran Yan, Zheng Chai, Haotian Zhang, and Xiao Liu (contact)
- Keypoint: superpoint
- Descriptor: mss (0 none: 0 bytes)
- Number of features: 2048
- Summary: superpoint with 2k features, using the guided superglue matching
- Paper: N/A
- Website: N/A
- Processing date: 21-06-07
Phototourism dataset / Stereo track
mAA at 10 degrees: 0.59211 (±0.00000 over 1 run(s) / ±0.12966 over 9 scenes)
Rank (per category): 7 (of 87)
| Scene | Features | Matches (raw) |
Matches (final) |
Rep. @ 3 px. | MS @ 3 px. | mAA(5o) | mAA(10o) |
| BM | 2046.0 | — | 414.4 | 0.470 Rank: 35/87 |
0.897 Rank: 39/87 |
0.35045 (±0.00000) Rank: 13/87 |
0.50411 (±0.00000) Rank: 16/87 |
| FCS | 2046.8 | — | 542.3 | 0.418 Rank: 10/87 |
0.873 Rank: 17/87 |
0.65755 (±0.00000) Rank: 15/87 |
0.77509 (±0.00000) Rank: 13/87 |
| LMS | 2048.0 | — | 554.9 | 0.449 Rank: 20/87 |
0.689 Rank: 35/87 |
0.62714 (±0.00000) Rank: 9/87 |
0.74666 (±0.00000) Rank: 11/87 |
| LB | 2048.0 | — | 418.2 | 0.406 Rank: 20/87 |
0.704 Rank: 42/87 |
0.50107 (±0.00000) Rank: 13/87 |
0.61483 (±0.00000) Rank: 12/87 |
| MC | 2048.0 | — | 453.0 | 0.429 Rank: 28/87 |
0.859 Rank: 44/87 |
0.35260 (±0.00000) Rank: 13/87 |
0.51161 (±0.00000) Rank: 20/87 |
| MR | 2045.2 | — | 464.0 | 0.427 Rank: 33/87 |
0.901 Rank: 30/87 |
0.28581 (±0.00000) Rank: 13/87 |
0.40453 (±0.00000) Rank: 6/87 |
| PSM | 2048.0 | — | 417.7 | 0.339 Rank: 38/87 |
0.618 Rank: 22/87 |
0.25916 (±0.00000) Rank: 11/87 |
0.42015 (±0.00000) Rank: 11/87 |
| SF | 2048.0 | — | 521.1 | 0.377 Rank: 25/87 |
0.790 Rank: 32/87 |
0.51904 (±0.00000) Rank: 9/87 |
0.66282 (±0.00000) Rank: 9/87 |
| SPC | 2048.0 | — | 433.4 | 0.386 Rank: 37/87 |
0.801 Rank: 32/87 |
0.52343 (±0.00000) Rank: 18/87 |
0.68922 (±0.00000) Rank: 10/87 |
| Avg | 2047.3 | — | 468.8 | 0.411 Rank: 33/87 |
0.792 Rank: 26/87 |
0.45292 (±0.00000) Rank: 9/87 |
0.59211 (±0.00000) Rank: 7/87 |
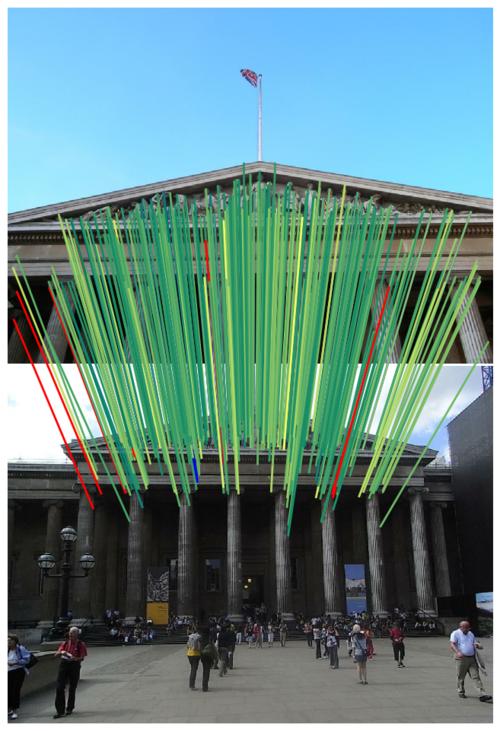
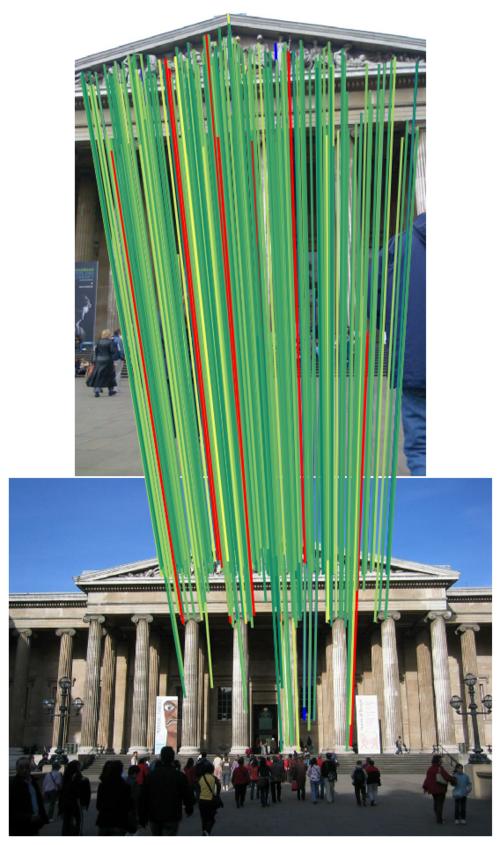
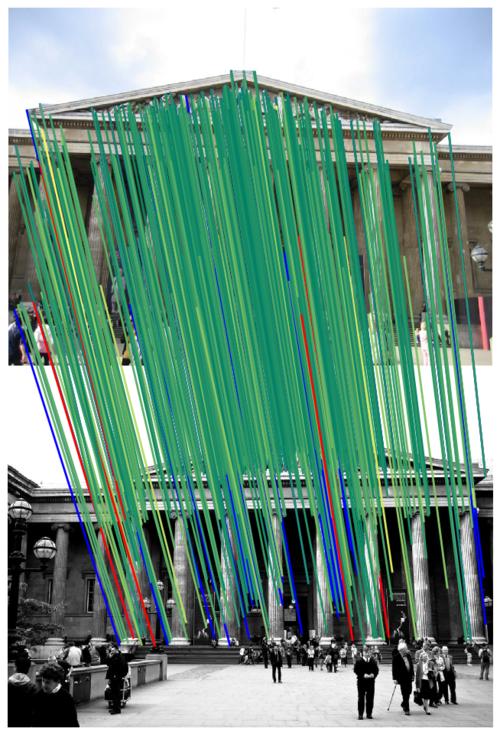
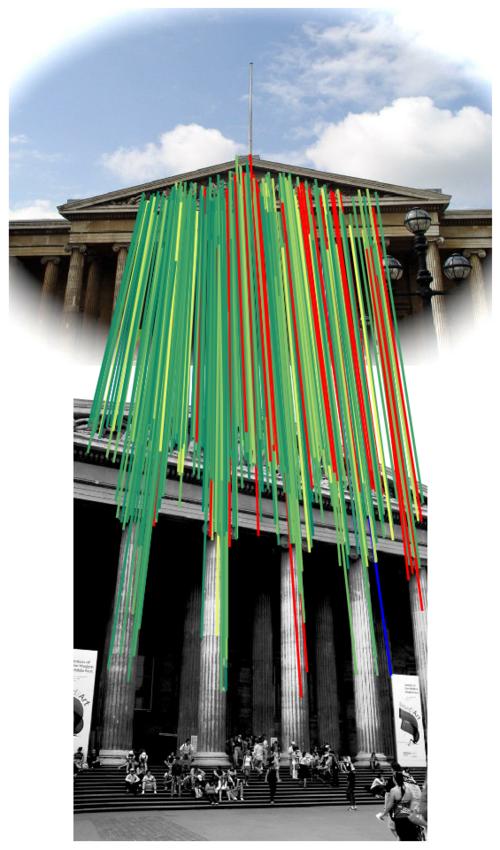
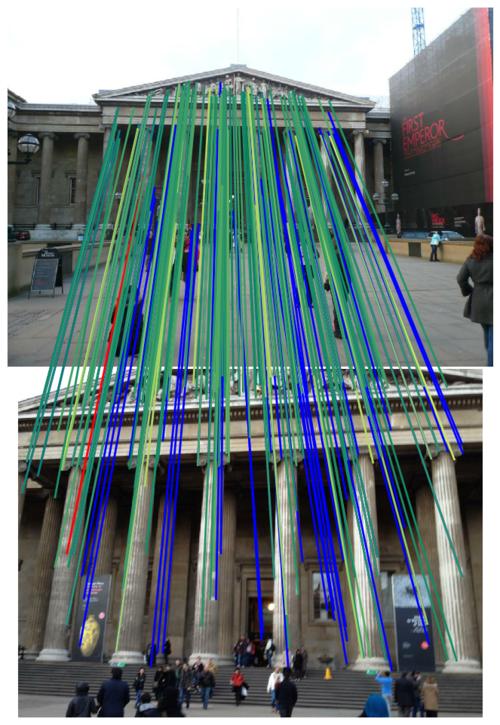
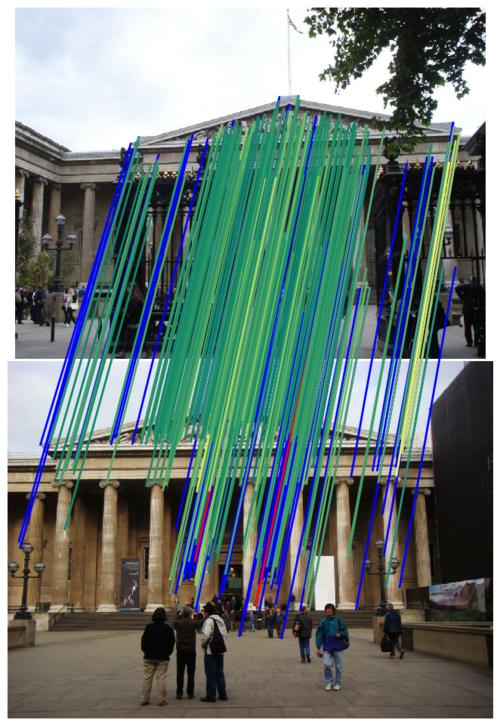
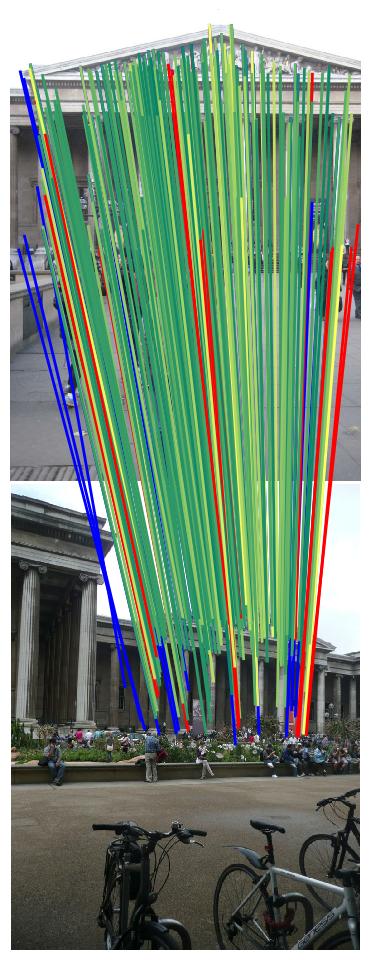
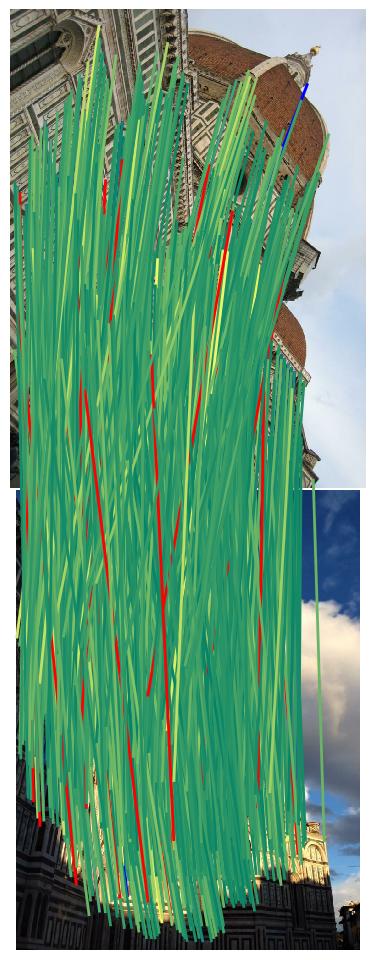
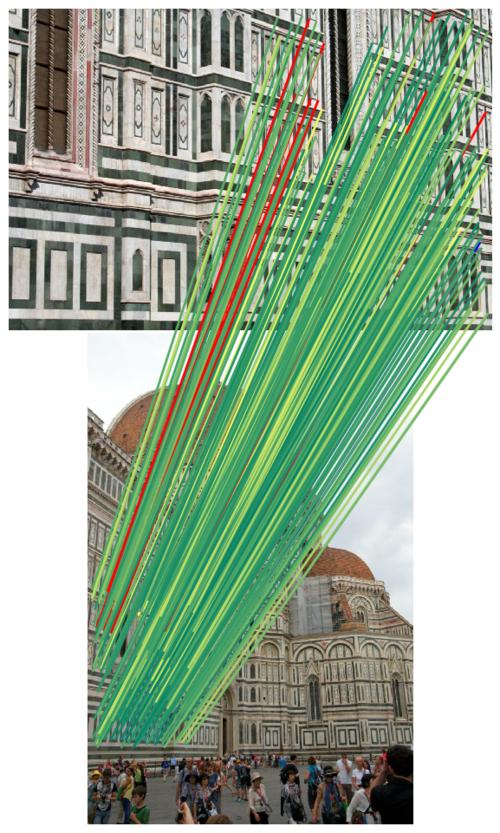
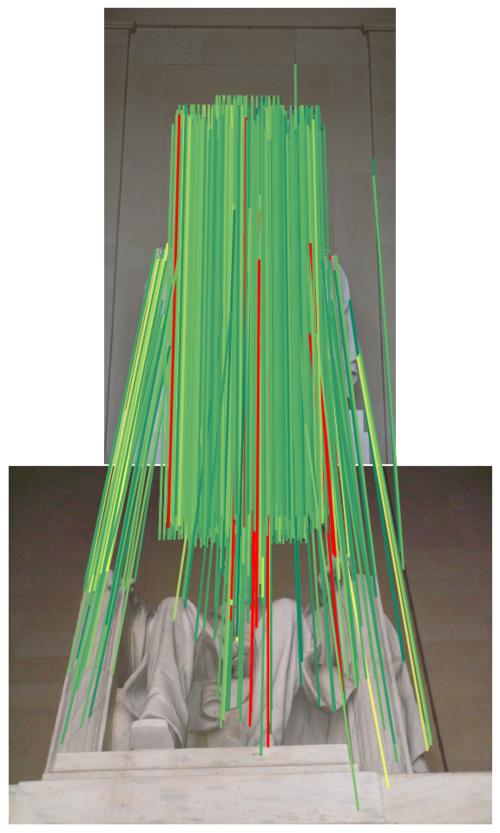
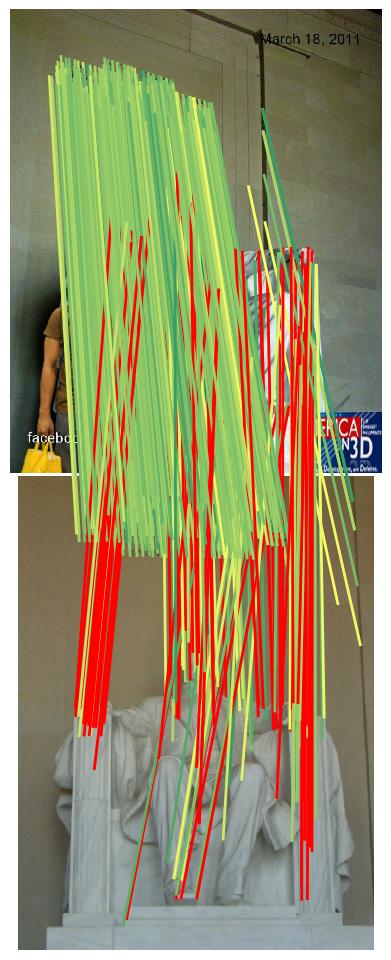
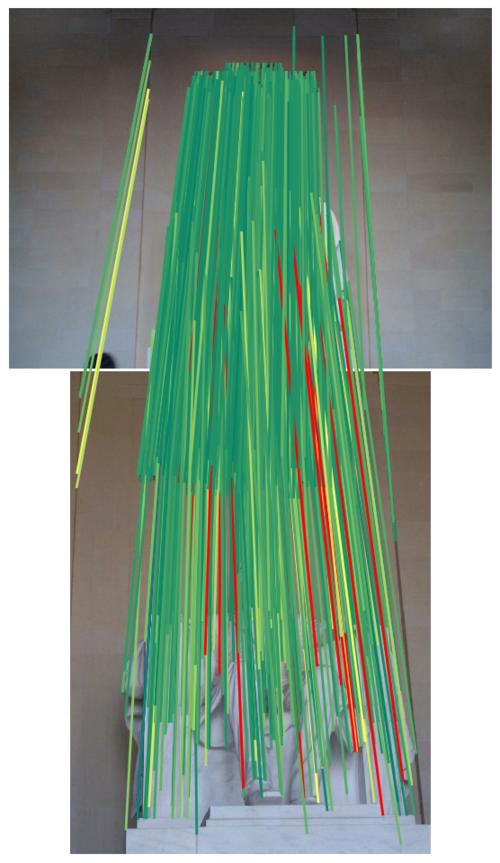
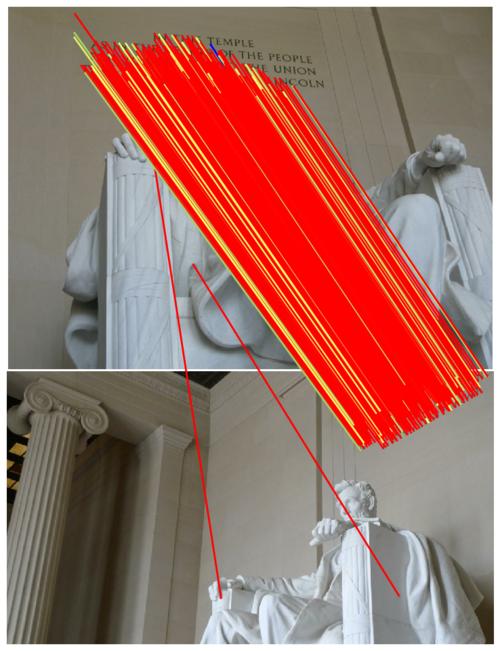
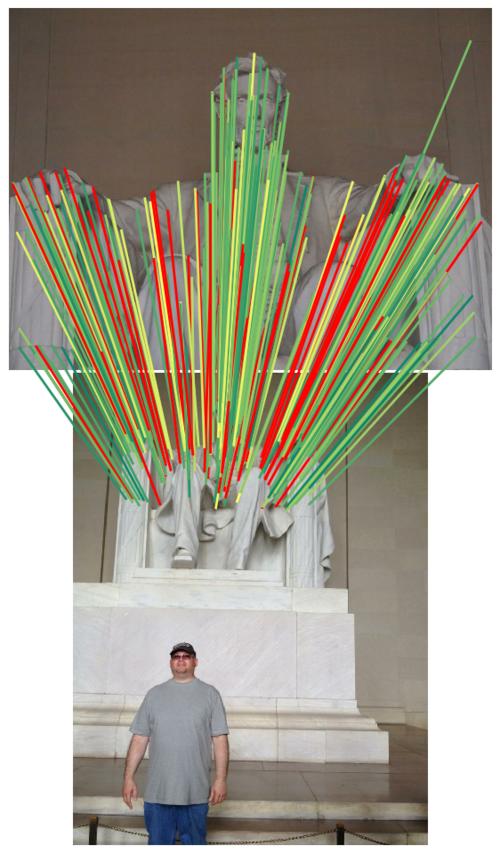
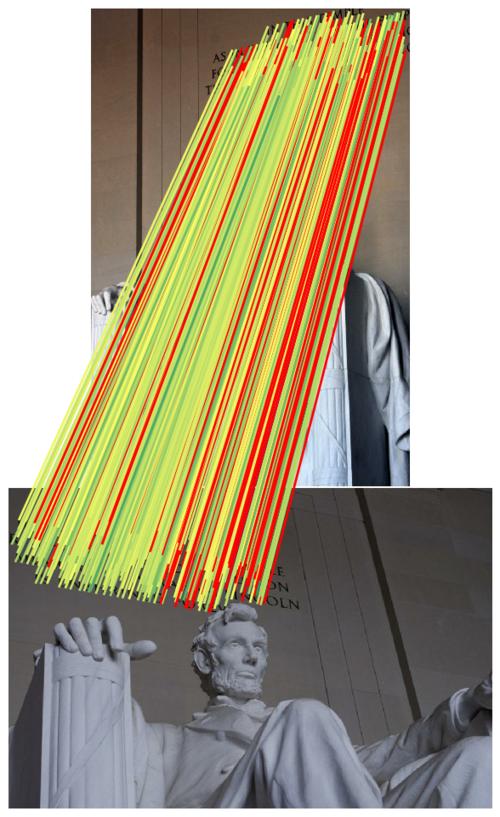
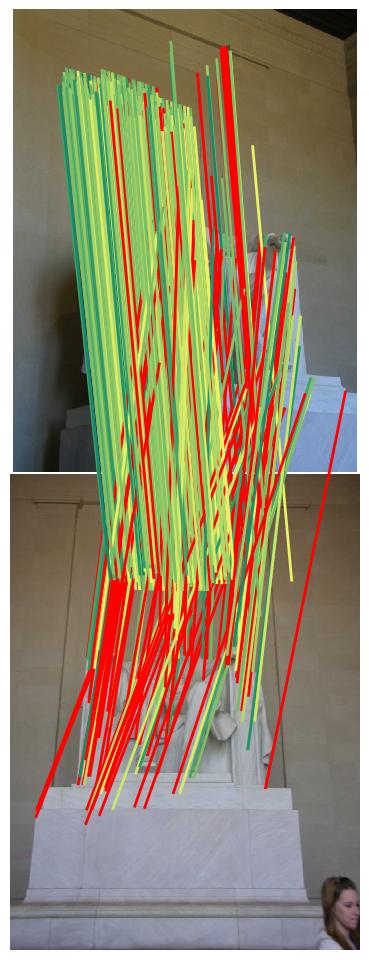
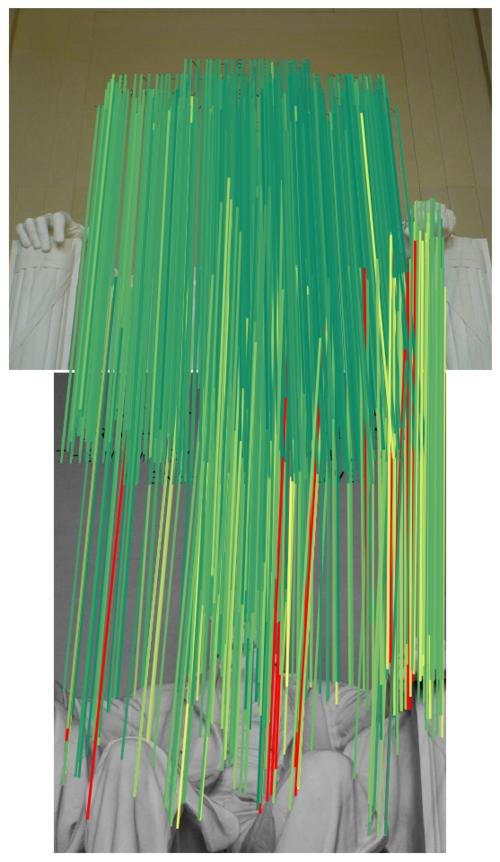
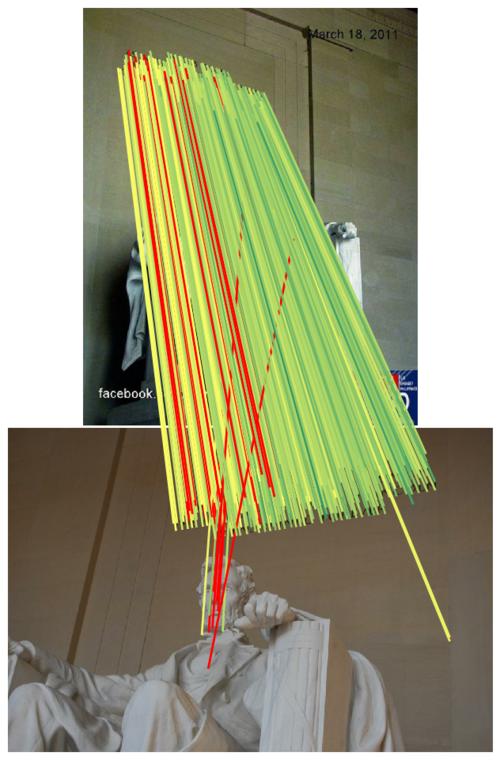
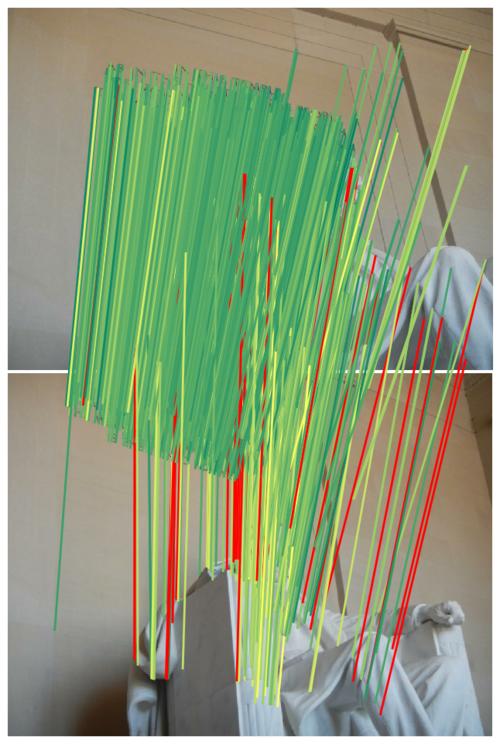
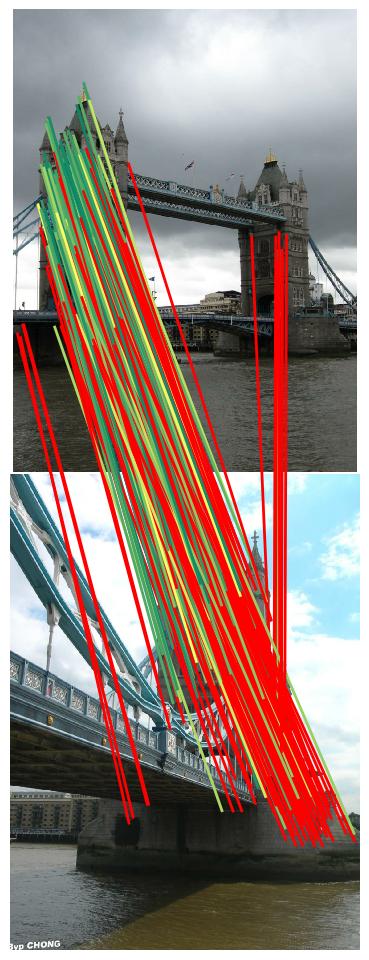
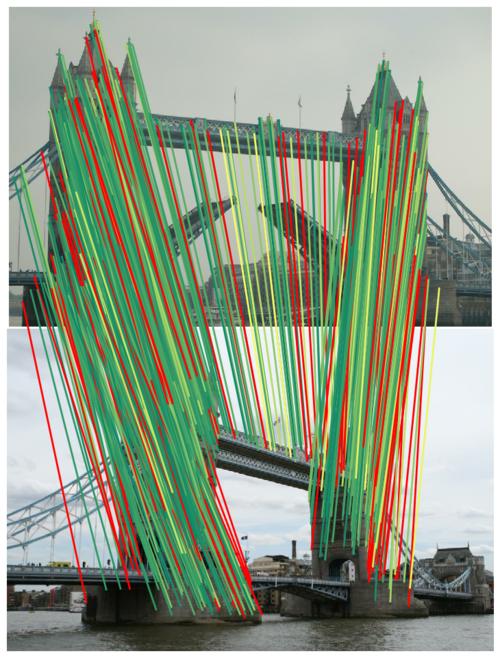
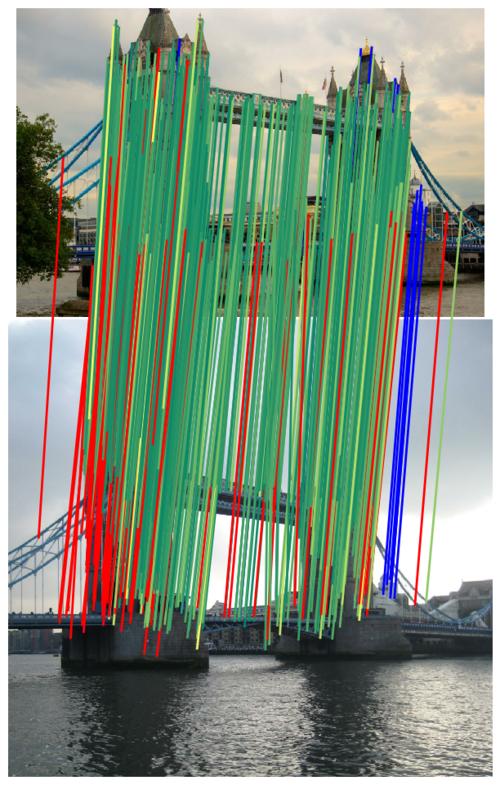
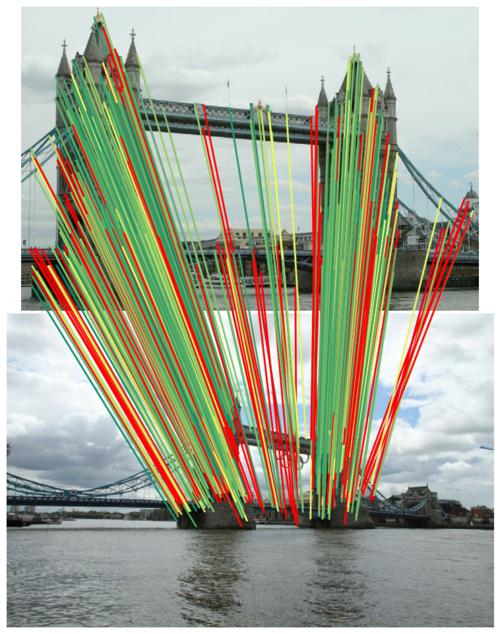
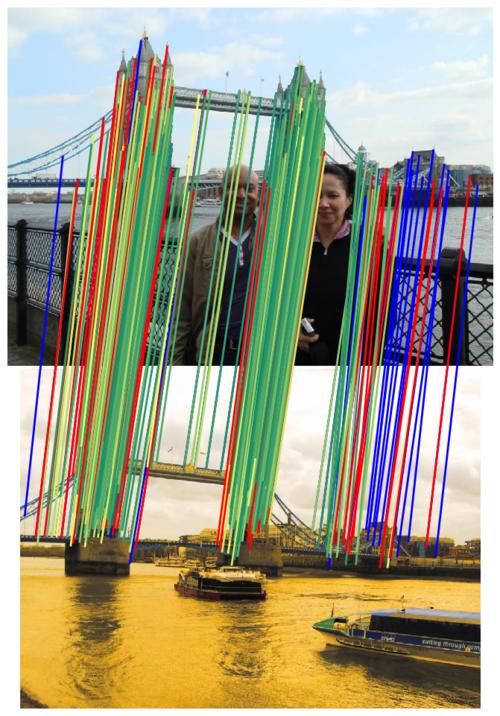
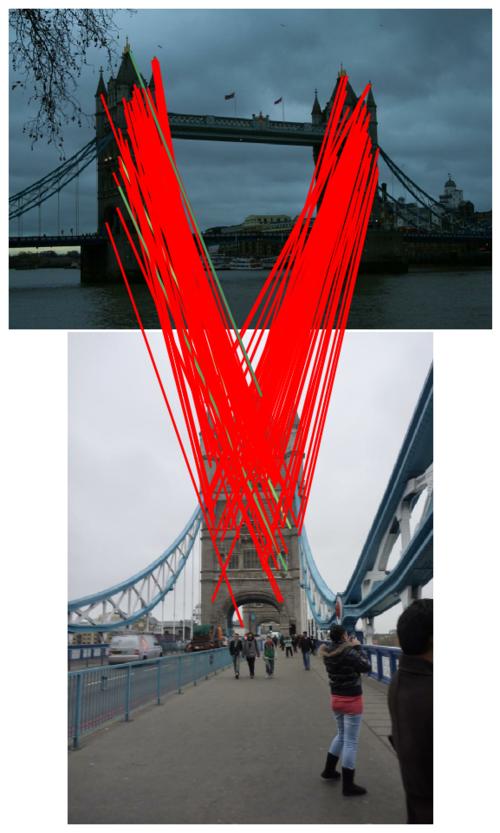
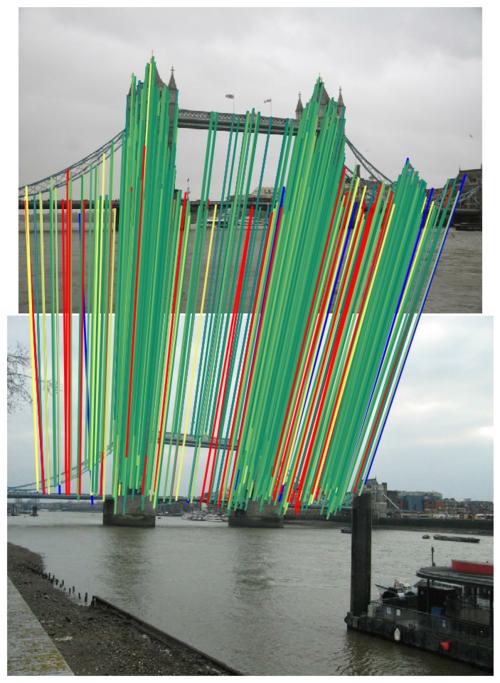
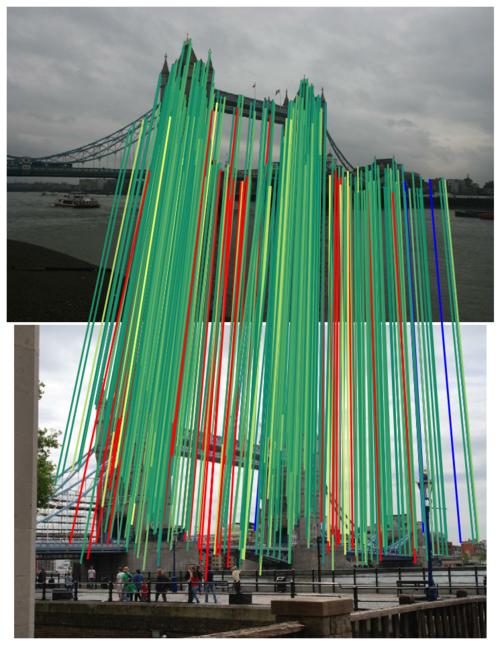
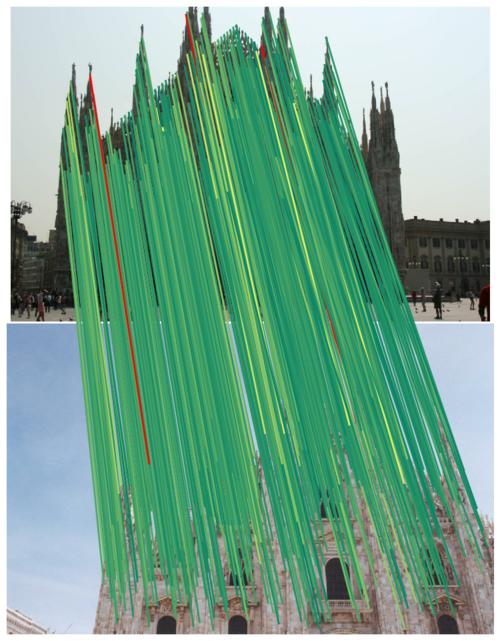
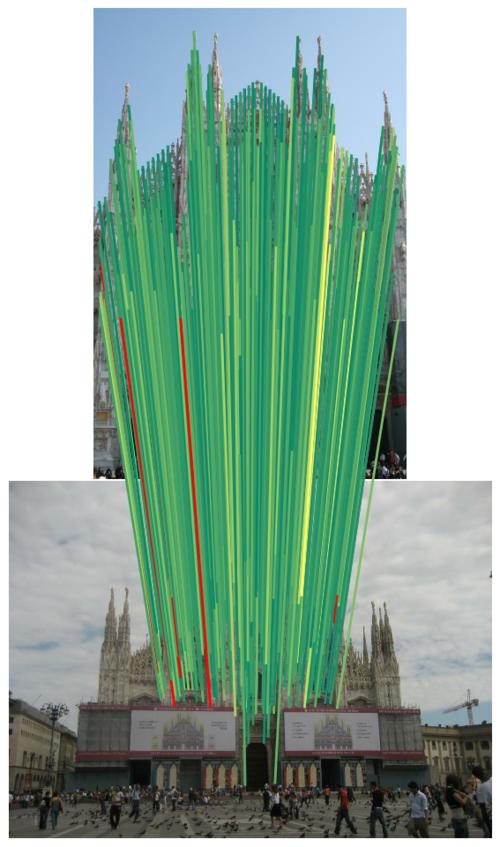
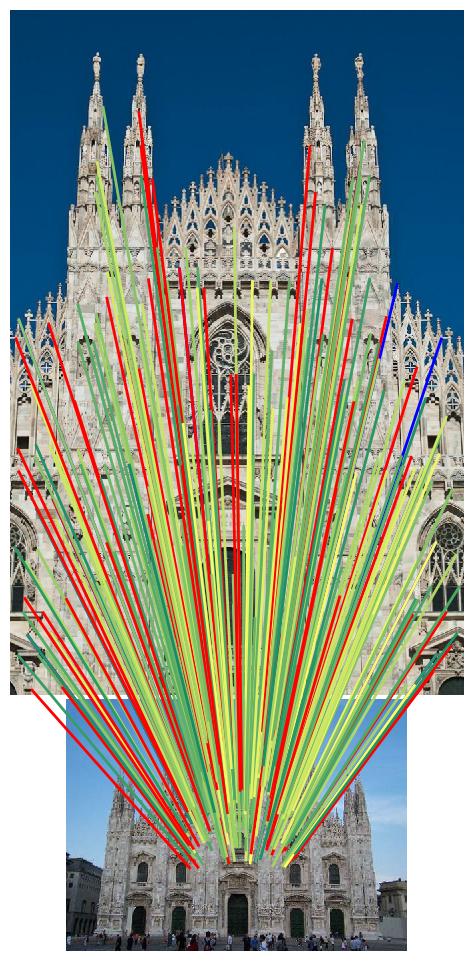
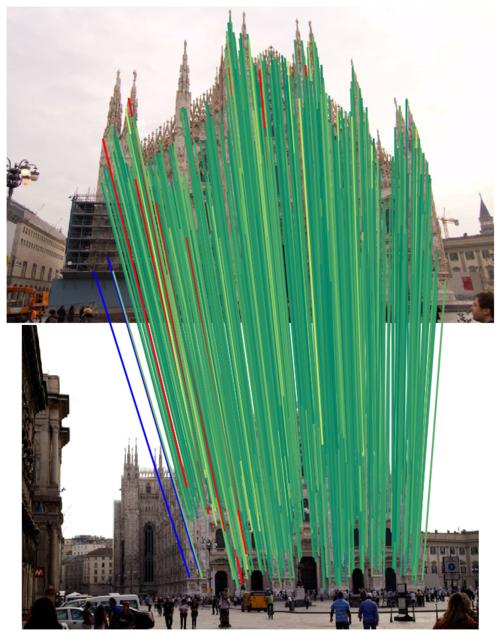
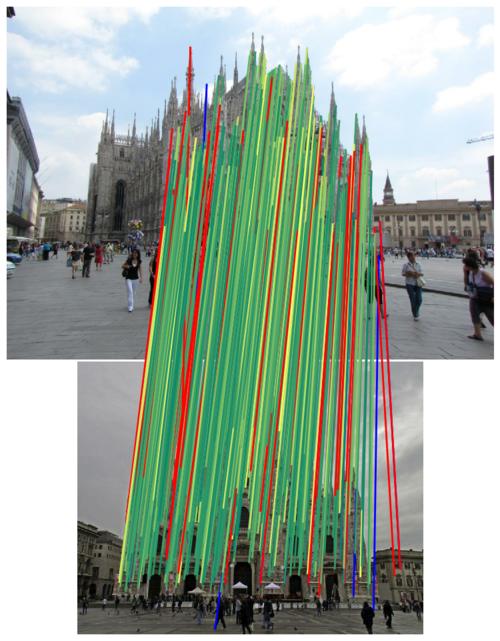
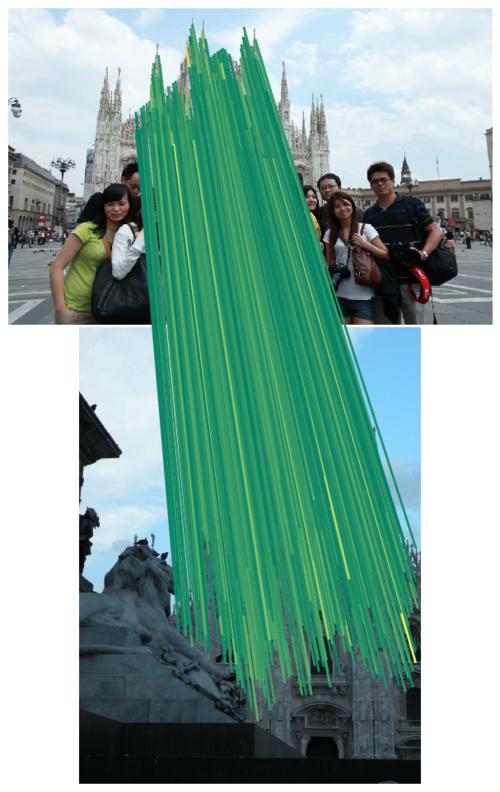
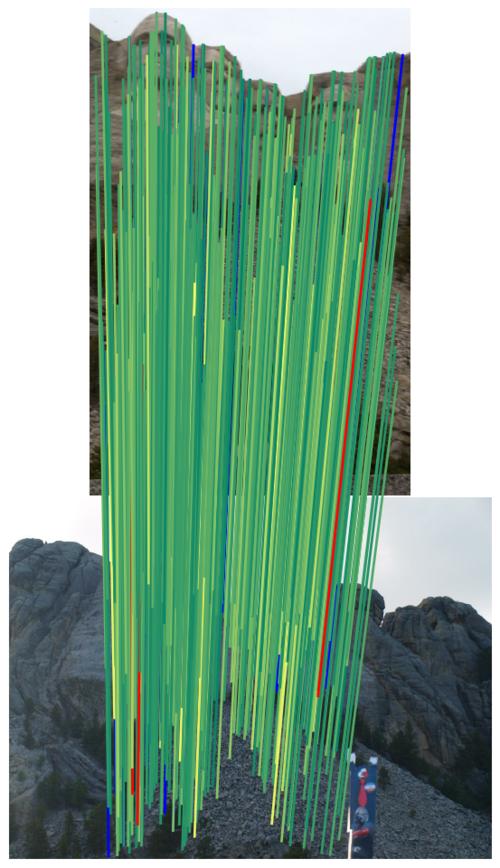
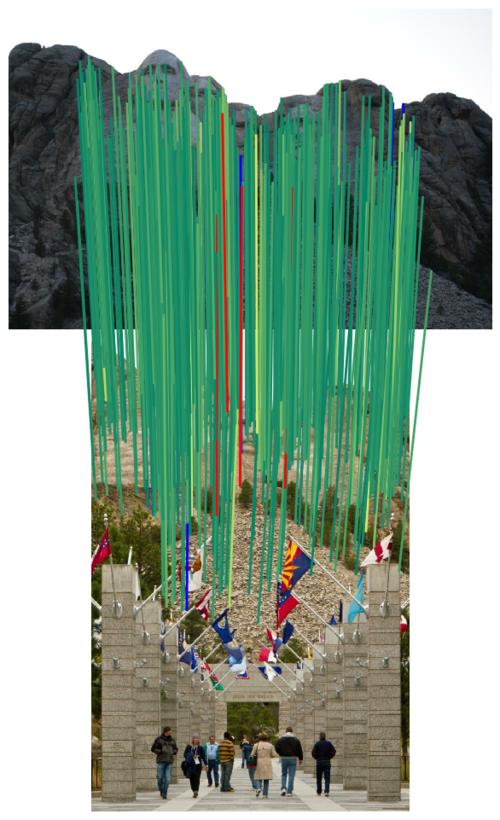
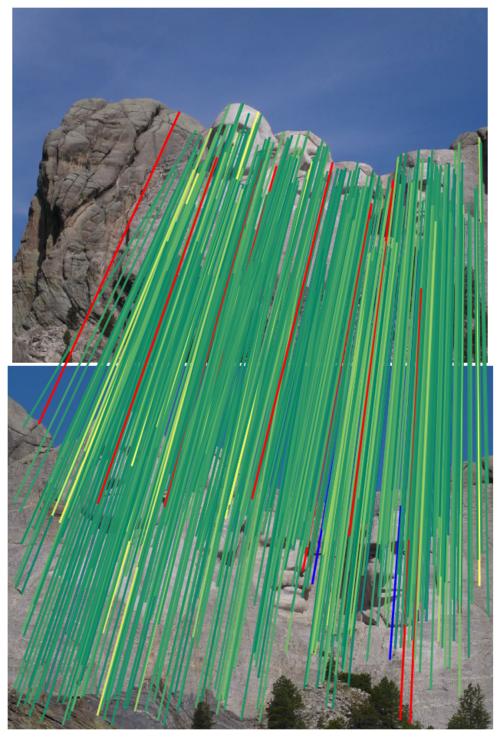
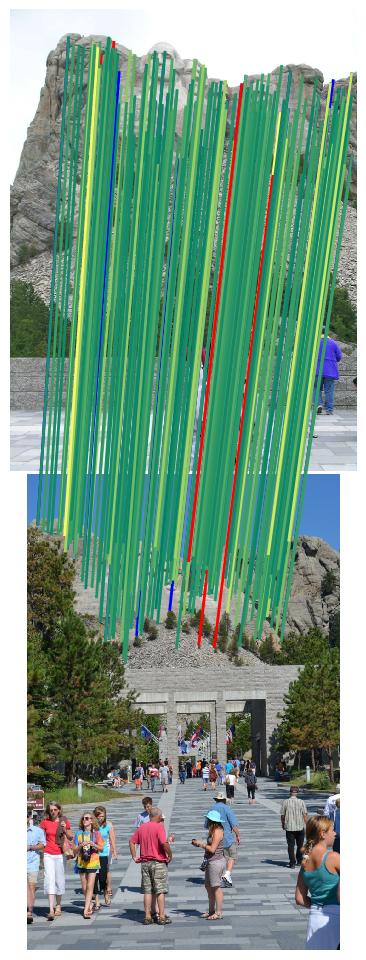
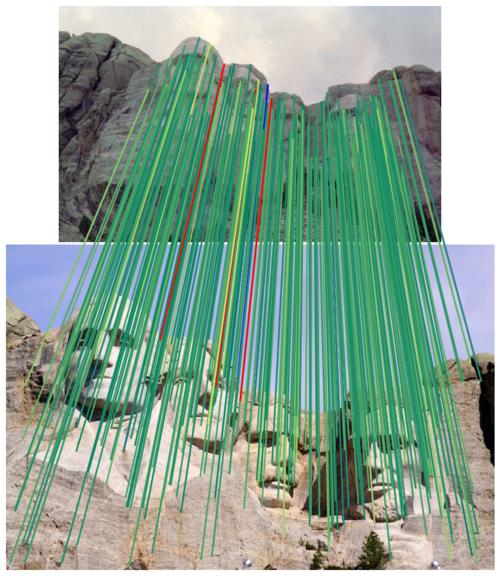
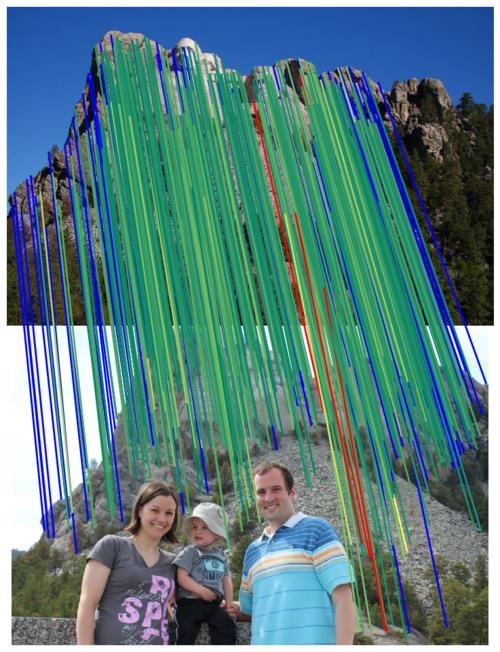
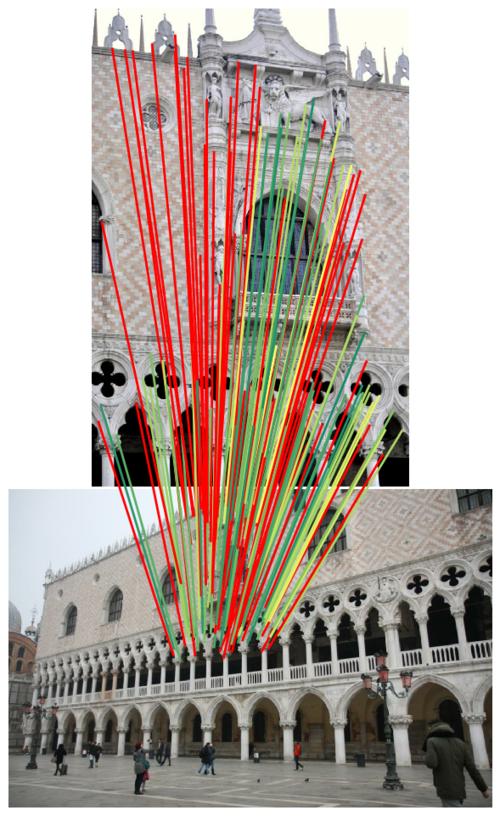
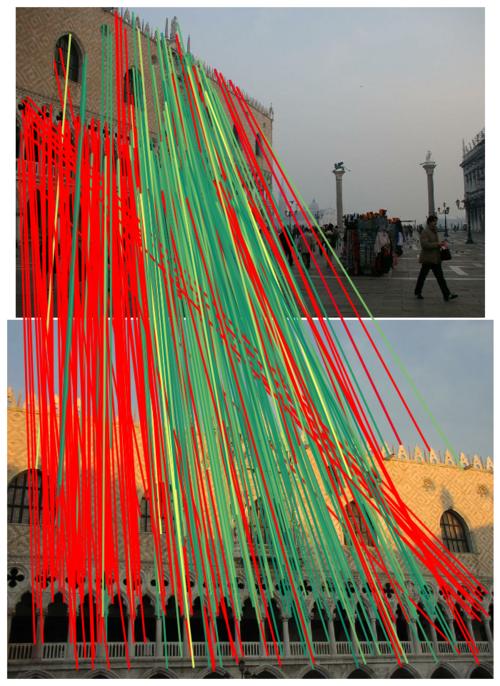
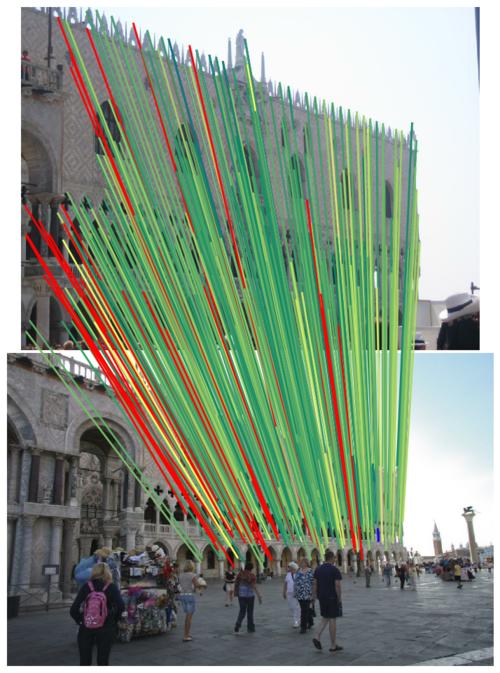
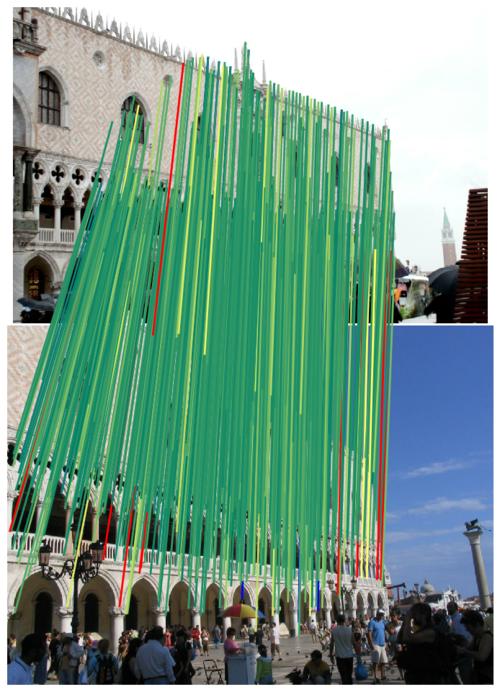
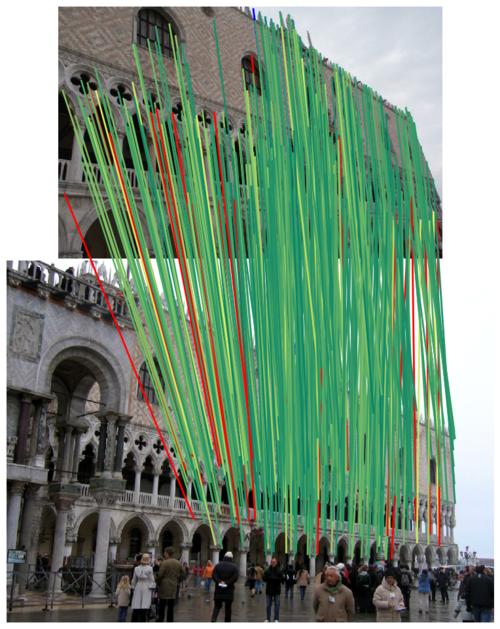
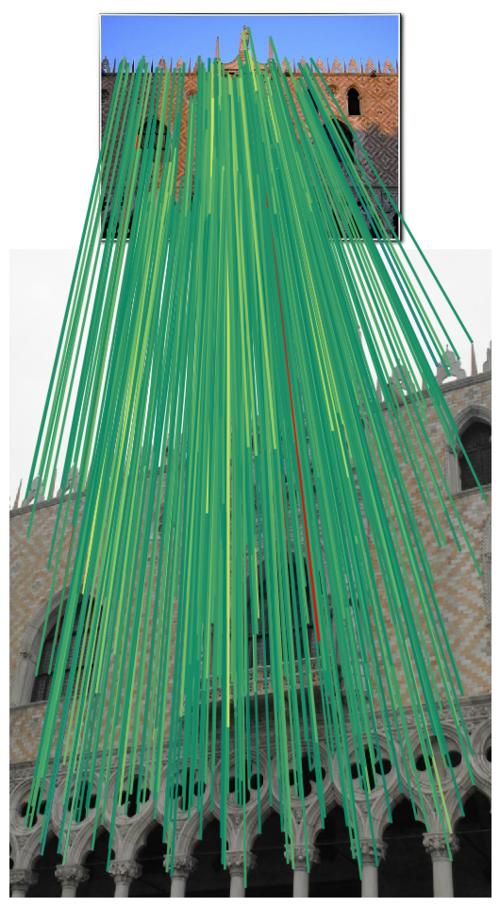
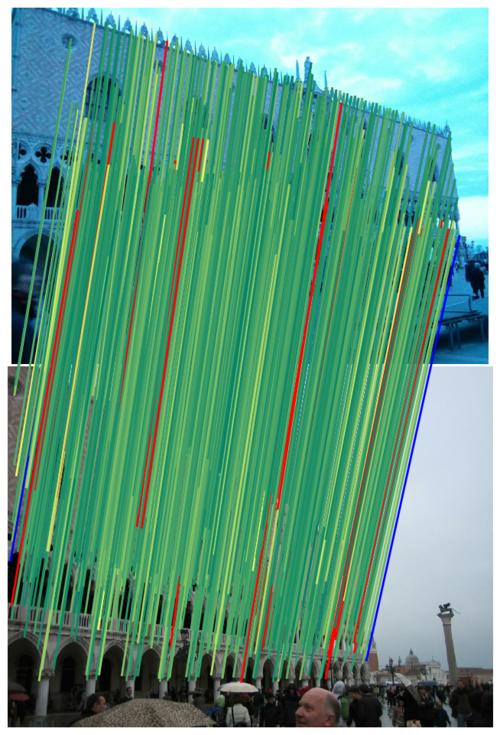
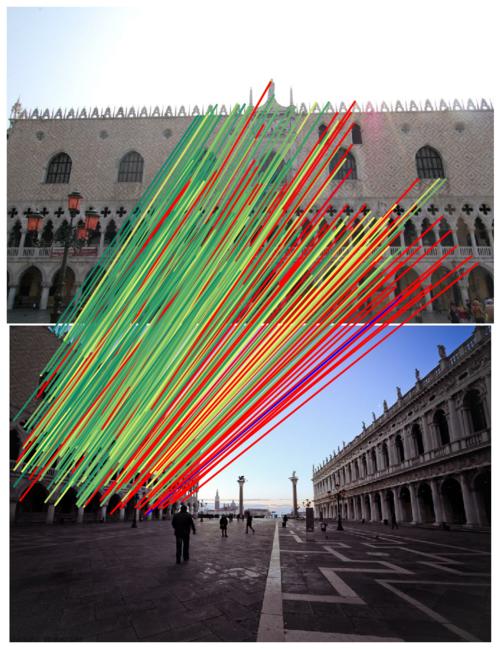
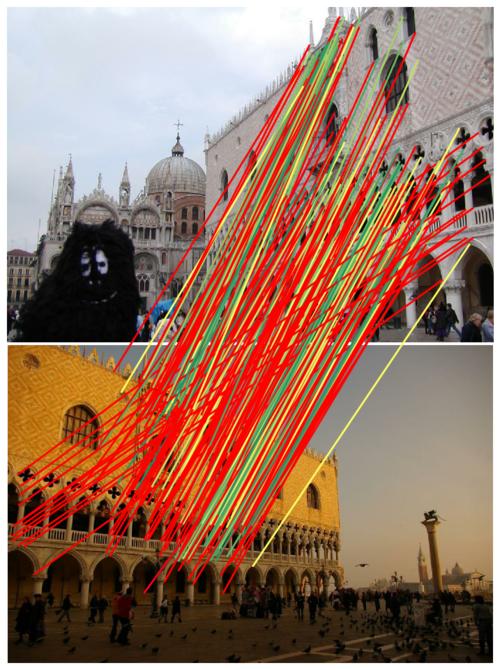
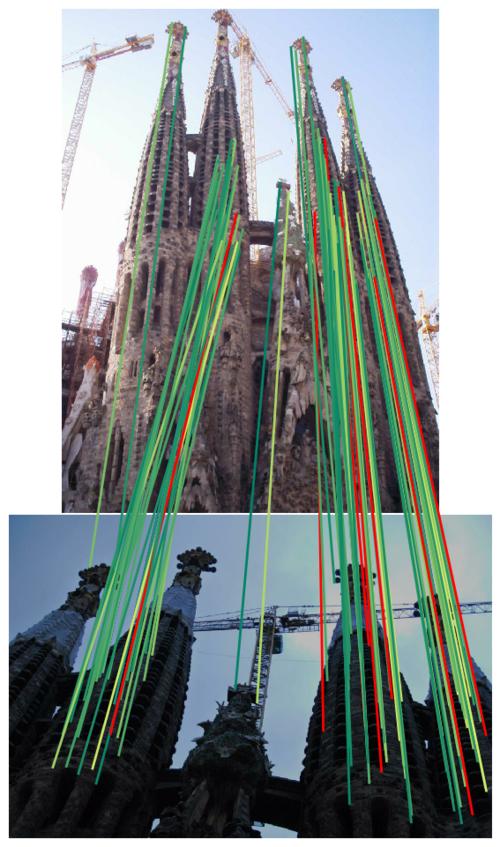
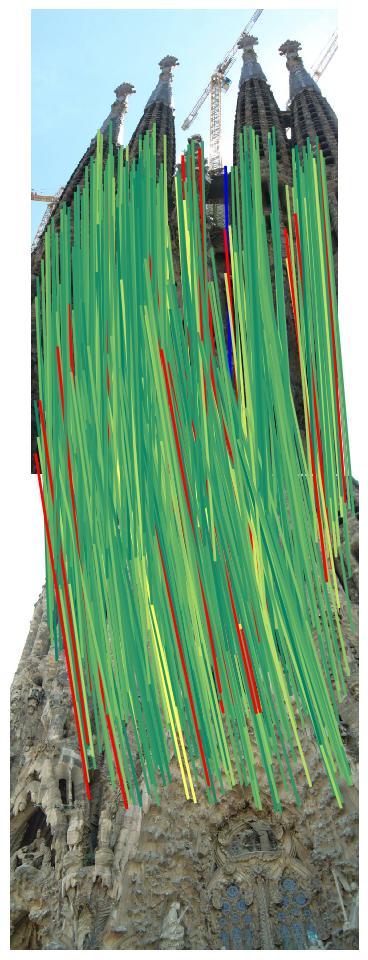
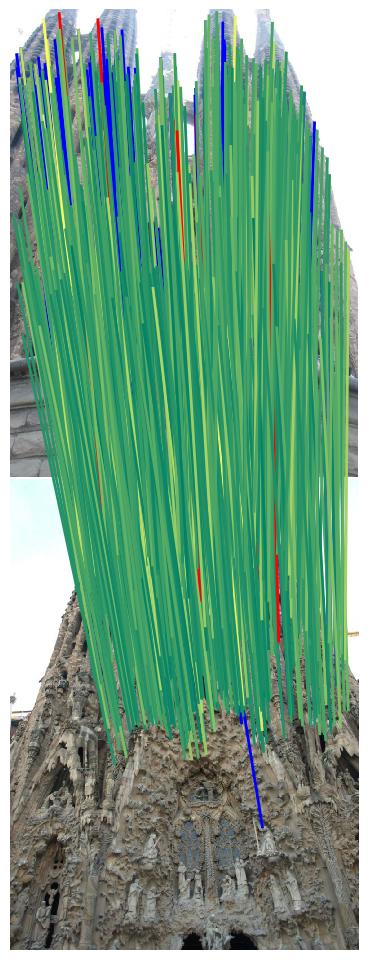
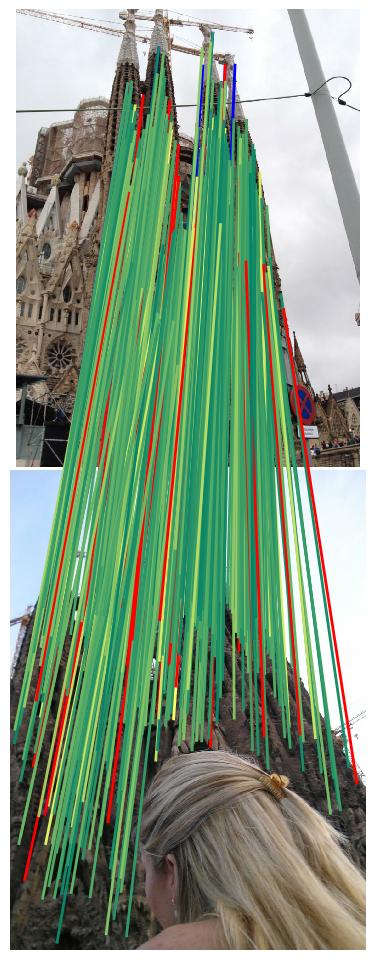
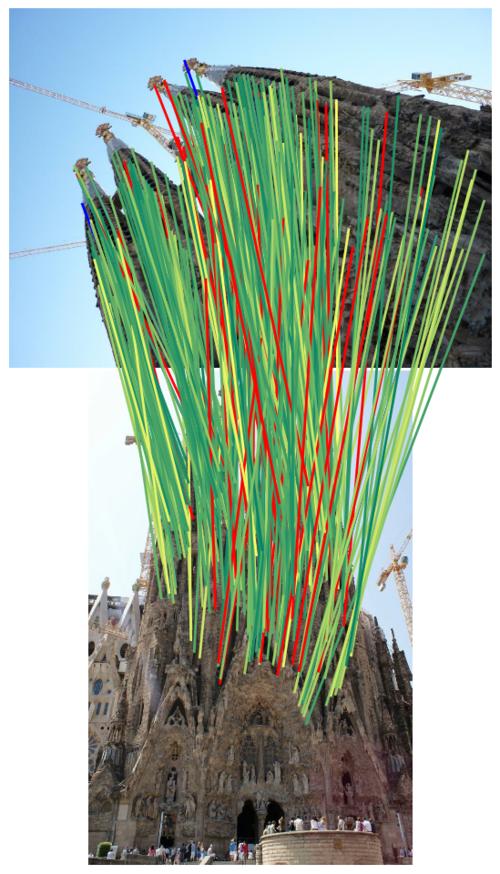
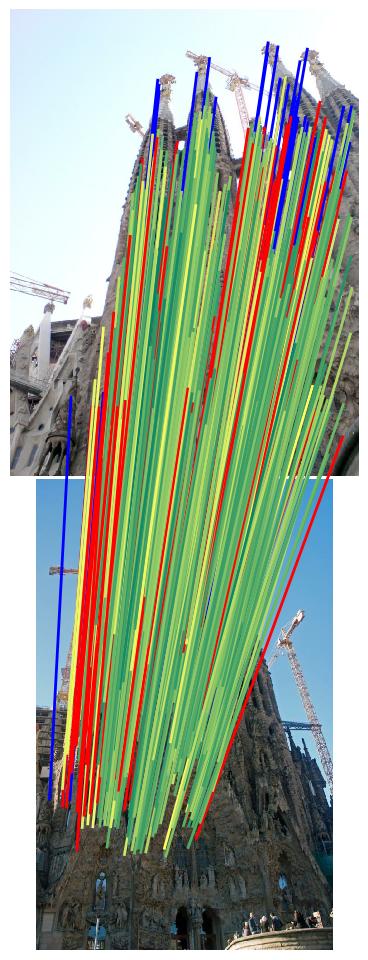
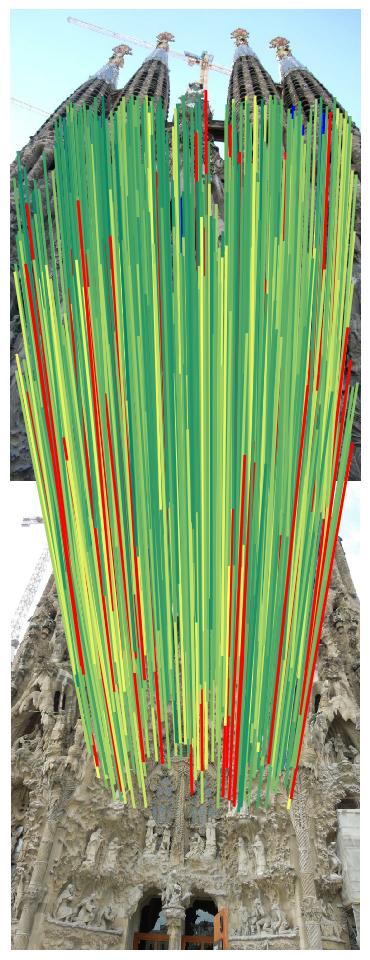
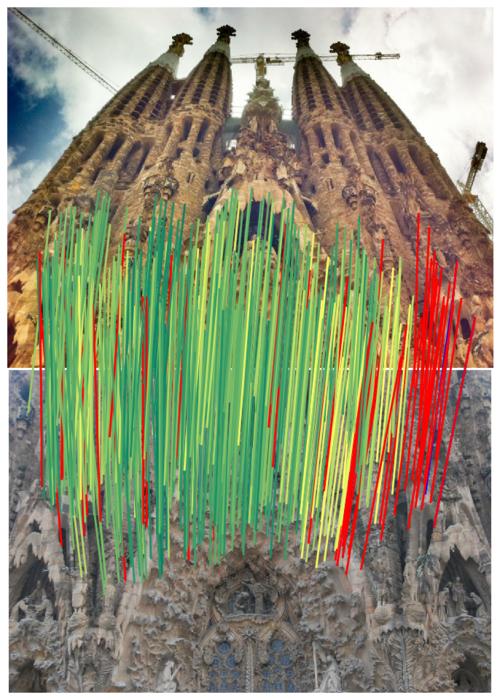
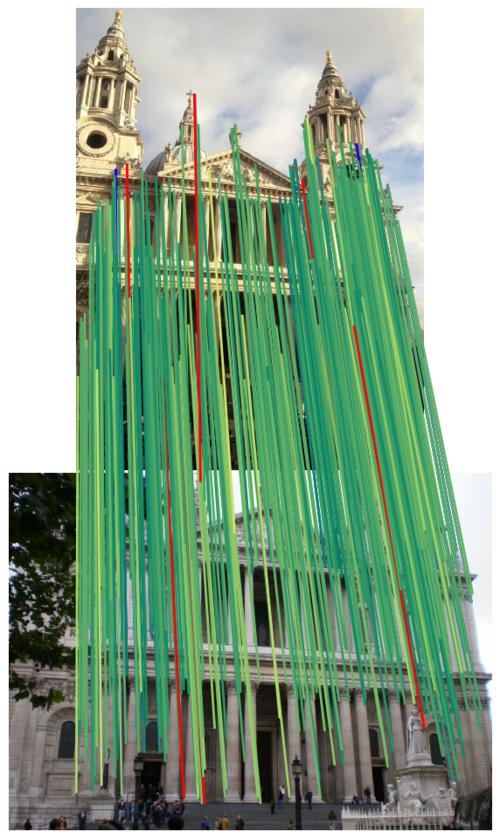
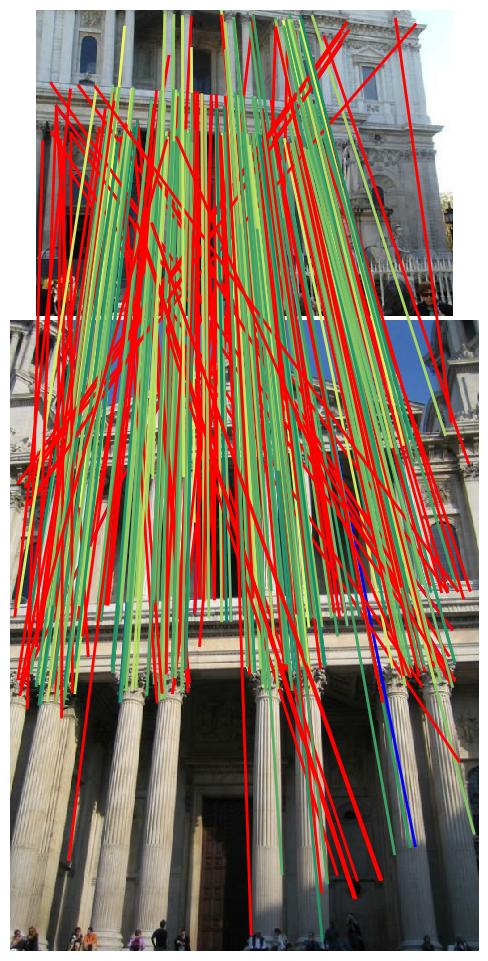
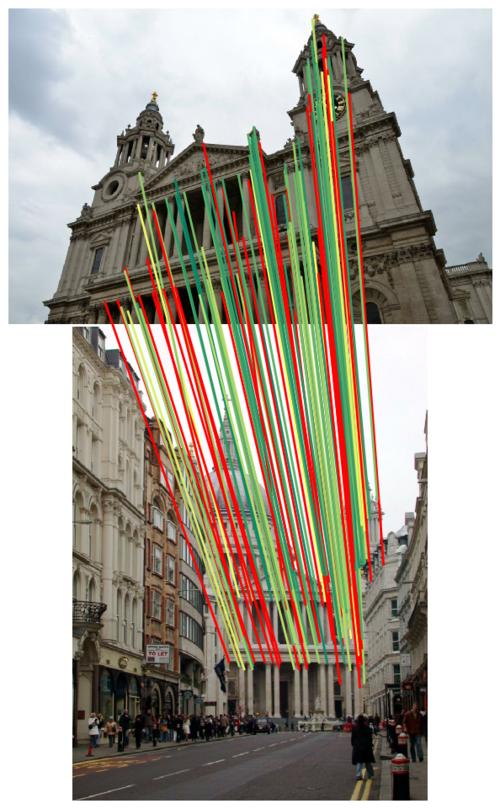
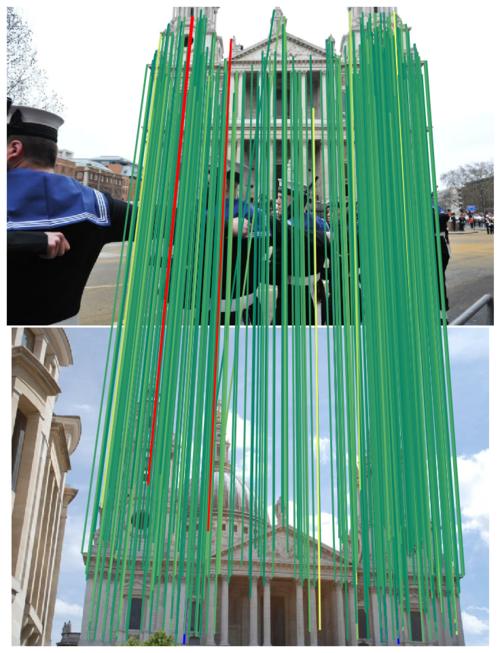
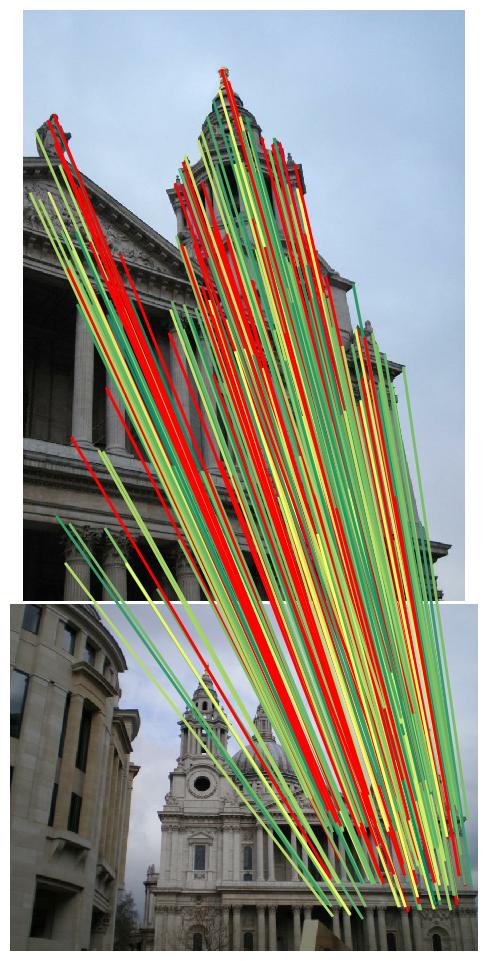
We show the inliers that survive the robust estimation loop (i.e. RANSAC), or those supplied with the submission if using custom matches, and use the depth estimates to determine whether they are correct. We draw matches above a 5-pixel error threshold in red, and those below are color-coded by their error, from 0 (green) to 5 pixels (yellow). Matches for which we do not have depth estimates are drawn in blue. Please note that the depth maps are estimates and may contain errors.
— British Museum —



— Florence Cathedral Side —
— Lincoln Memorial Statue —
— London Bridge —


— Milan Cathedral —
— Mount Rushmore —

— Piazza San Marco —

— Sagrada Familia —

— Saint Paul's Cathedral —


Phototourism dataset / Multiview track
mAA at 10 degrees: N/A (±0.00000 over 1 run(s) / ±0.10175 over 9 scenes)
Rank (per category): 11 (of 87)
| Scene | Features | Matches (input) |
RegistrationRatio (%) | Number of Landmarks |
Track Length | ATE | mAA(50) | mAA(100) |
| BM | 2046.0 | 414.98 | 99.93 Rank: 24/87 |
2091.61 Rank: 31/87 |
5.021 Rank: 25/87 |
0.34051 Rank: 10/87 |
0.59846 (±0.00000) Rank: 11/87 |
0.73574 (±0.00000) Rank: 7/87 |
| FCS | 2046.8 | 549.72 | 97.53 Rank: 47/87 |
2652.21 Rank: 28/87 |
5.112 Rank: 22/87 |
0.26605 Rank: 55/87 |
0.74072 (±0.00000) Rank: 31/87 |
0.80011 (±0.00000) Rank: 30/87 |
| LMS | 2048.0 | 580.48 | 99.80 Rank: 2/87 |
2024.41 Rank: 24/87 |
5.856 Rank: 18/87 |
0.28766 Rank: 29/87 |
0.88502 (±0.00000) Rank: 1/87 |
0.93025 (±0.00000) Rank: 1/87 |
| LB | 2048.0 | 489.63 | 98.36 Rank: 1/87 |
2130.45 Rank: 20/87 |
5.388 Rank: 25/87 |
0.48691 Rank: 36/87 |
0.72572 (±0.00000) Rank: 16/87 |
0.81587 (±0.00000) Rank: 14/87 |
| MC | 2048.0 | 445.49 | 100.00 Rank: 1/87 |
2220.25 Rank: 32/87 |
5.246 Rank: 23/87 |
0.35082 Rank: 25/87 |
0.55352 (±0.00000) Rank: 29/87 |
0.70369 (±0.00000) Rank: 24/87 |
| MR | 2045.2 | 457.26 | 94.80 Rank: 29/87 |
2265.23 Rank: 33/87 |
4.914 Rank: 18/87 |
0.48814 Rank: 11/87 |
0.43844 (±0.00000) Rank: 22/87 |
0.56420 (±0.00000) Rank: 19/87 |
| PSM | 2048.0 | 418.48 | 99.67 Rank: 11/87 |
2573.27 Rank: 23/87 |
4.600 Rank: 14/87 |
0.34022 Rank: 22/87 |
0.64028 (±0.00000) Rank: 31/87 |
0.72441 (±0.00000) Rank: 33/87 |
| SF | 2048.0 | 513.99 | 100.00 Rank: 1/87 |
2828.79 Rank: 22/87 |
5.100 Rank: 8/87 |
0.28163 Rank: 30/87 |
0.78185 (±0.00000) Rank: 18/87 |
0.86307 (±0.00000) Rank: 21/87 |
| SPC | 2048.0 | 443.38 | 100.00 Rank: 1/87 |
2321.26 Rank: 31/87 |
5.218 Rank: 17/87 |
0.39048 Rank: 2/87 |
0.75427 (±0.00000) Rank: 25/87 |
0.84859 (±0.00000) Rank: 23/87 |
| Avg | 2047.3 | 479.27 | 98.90 Rank: 13/87 |
2345.28 Rank: 27/87 |
5.162 Rank: 21/87 |
0.35916 Rank: 12/87 |
0.67981 (±0.00000) Rank: 13/87 |
0.77621 (±0.00000) Rank: 11/87 |
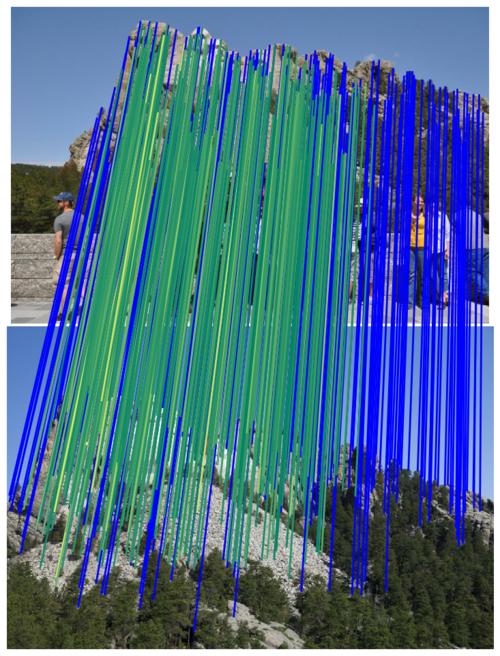
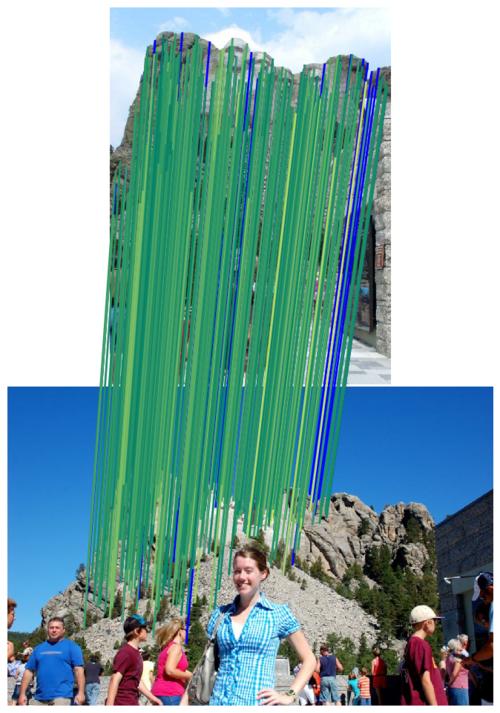
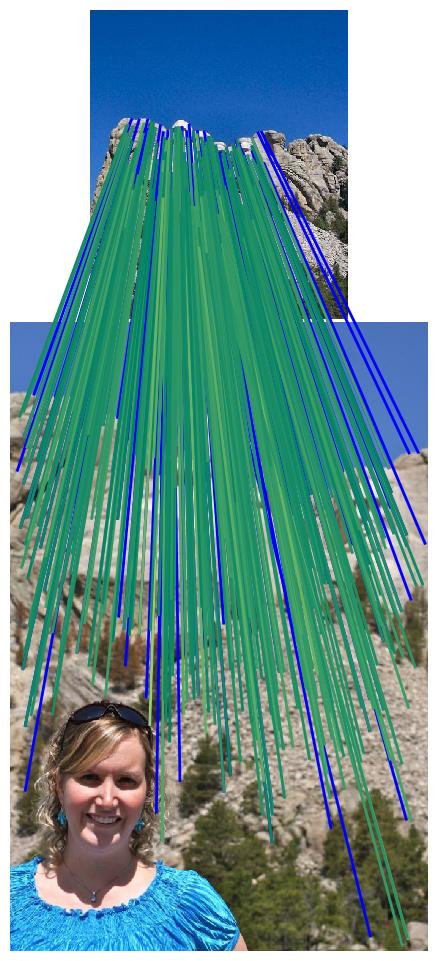
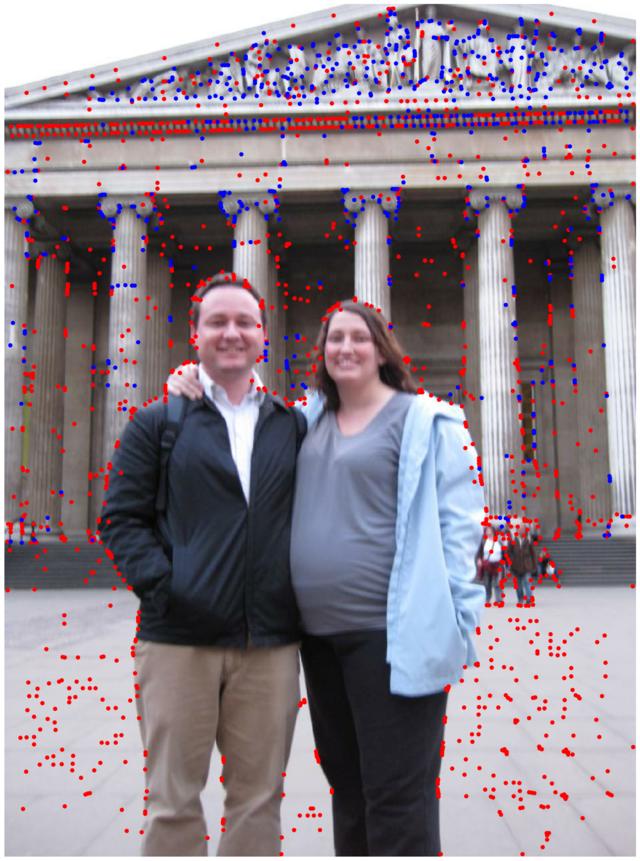
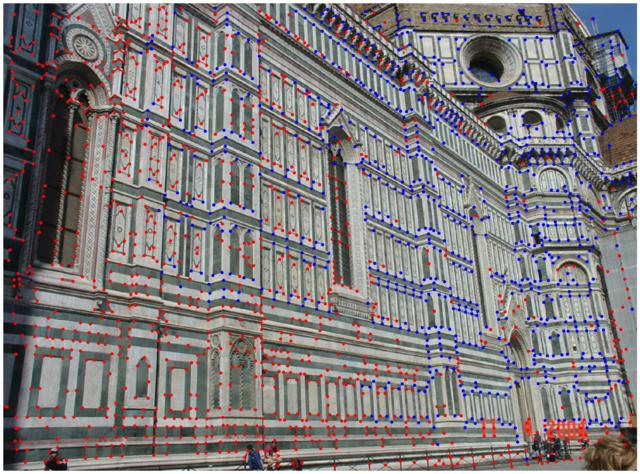
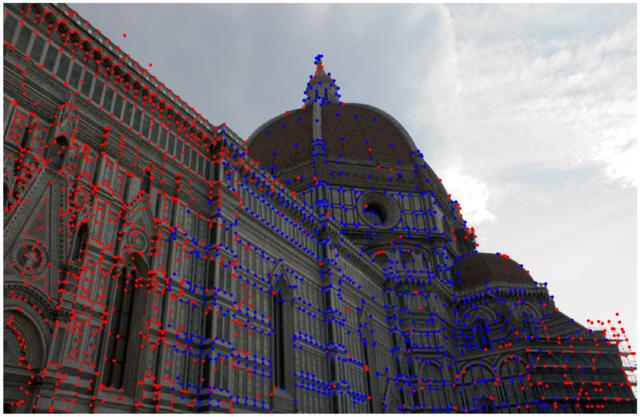
In the multi-view track we reconstruct the scene with Structure-from-Motion (Colmap) with small sets of images. We show the results for one bag of 10 images. Keypoints are drawn in blue if they are part of the model, and in red otherwise.
— British Museum —









— Florence Cathedral Side —








— Lincoln Memorial Statue —


— London Bridge —







— Milan Cathedral —







— Mount Rushmore —





— Piazza San Marco —








— Sagrada Familia —



— Saint Paul's Cathedral —










Prague Parks dataset / Stereo track
mAA at 10 degrees: 0.77654 (±0.00000 over 1 run(s) / ±0.04527 over 3 scenes)
Rank (per category): 3 (of 87)
| Scene | Features | Matches (raw) |
Matches (final) |
Rep. @ 3 px. | MS @ 3 px. | mAA(5o) | mAA(10o) |
| Lizard | 2048.0 | — | 404.9 | 0.035 Rank: 32/87 |
0.012 Rank: 19/87 |
0.62524 (±0.00000) Rank: 3/87 |
0.75811 (±0.00000) Rank: 3/87 |
| Pond | 2048.0 | — | 422.2 | 0.048 Rank: 41/87 |
0.046 Rank: 51/87 |
0.59760 (±0.00000) Rank: 7/87 |
0.73267 (±0.00000) Rank: 8/87 |
| Tree | 2048.0 | — | 276.2 | 0.029 Rank: 39/87 |
0.024 Rank: 21/87 |
0.74614 (±0.00000) Rank: 4/87 |
0.83885 (±0.00000) Rank: 9/87 |
| Avg | 2048.0 | — | 367.8 | 0.038 Rank: 36/87 |
0.027 Rank: 26/87 |
0.65632 (±0.00000) Rank: 3/87 |
0.77654 (±0.00000) Rank: 3/87 |
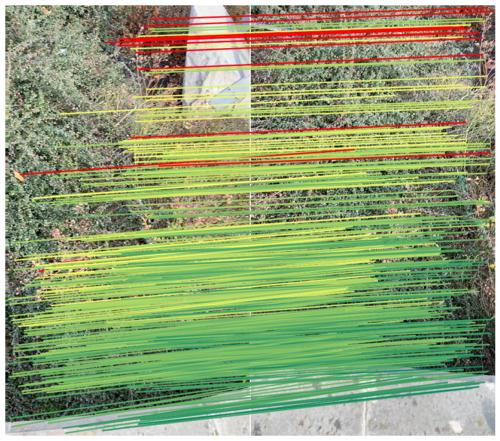
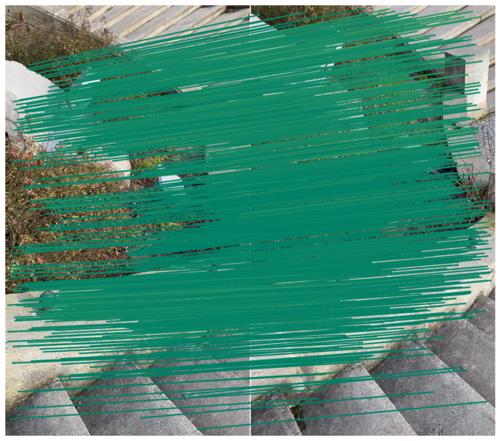
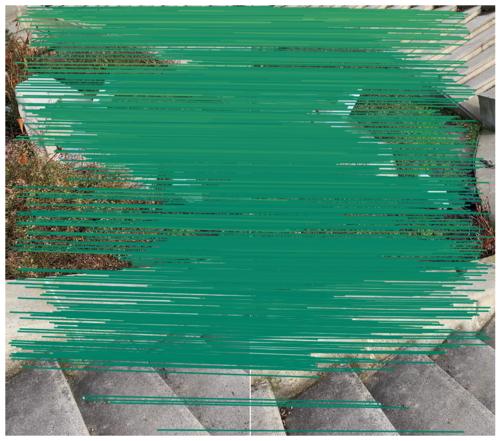
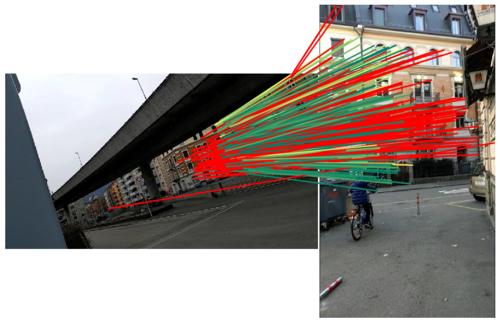
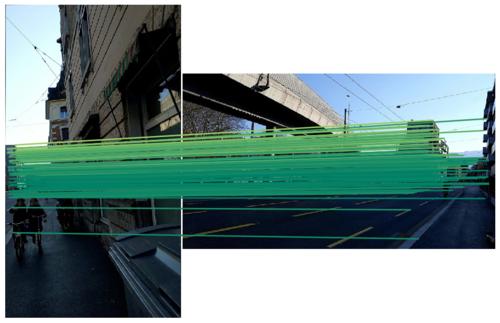
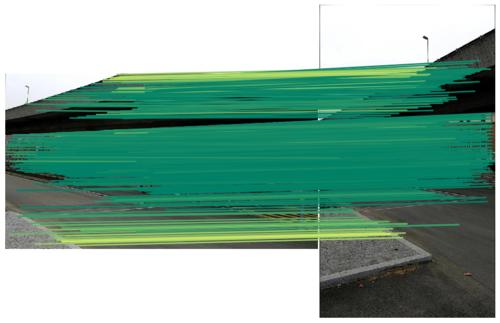
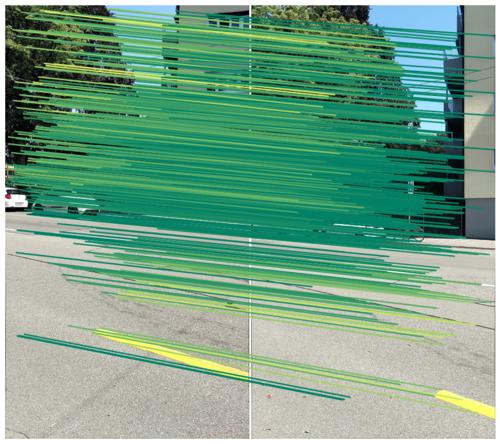
We show the inliers that survive the robust estimation loop (i.e. RANSAC), or those supplied with the submission if using custom matches, and use the depth estimates to determine whether they are correct. We draw matches above a 5-pixel error threshold in red, and those below are color-coded by their error, from 0 (green) to 5 pixels (yellow). Matches for which we do not have depth estimates are drawn in blue. Please note that the depth maps are estimates and may contain errors.
— Lizard —


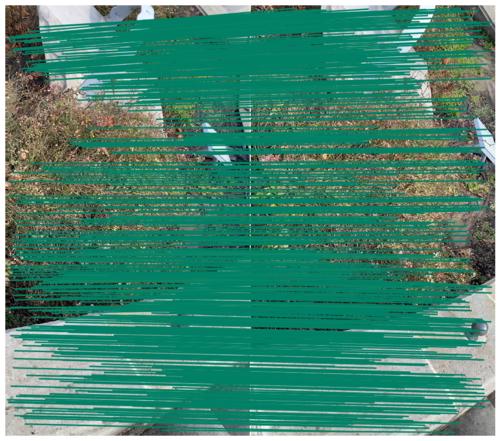
— Pond —



— Tree —









Prague Parks dataset / Multiview track
mAA at 10 degrees: N/A (±0.00000 over 1 run(s) / ±0.14156 over 3 scenes)
Rank (per category): 5 (of 87)
| Scene | Features | Matches (input) |
RegistrationRatio (%) | Number of Landmarks |
Track Length | ATE | mAA(50) | mAA(100) |
| Lizard | 2048.0 | 424.58 | 85.70 Rank: 2/87 |
1286.41 Rank: 8/87 |
3.361 Rank: 47/87 |
14.51684 Rank: 58/87 |
0.59411 (±0.00000) Rank: 11/87 |
0.67690 (±0.00000) Rank: 10/87 |
| Pond | 2048.0 | 455.22 | 69.03 Rank: 22/87 |
1067.57 Rank: 11/87 |
2.918 Rank: 33/87 |
0.44792 Rank: 68/87 |
0.30189 (±0.00000) Rank: 6/87 |
0.33082 (±0.00000) Rank: 7/87 |
| Tree | 2048.0 | 267.94 | 71.51 Rank: 29/87 |
560.90 Rank: 26/87 |
3.012 Rank: 24/87 |
6.22405 Rank: 63/87 |
0.45153 (±0.00000) Rank: 19/87 |
0.48508 (±0.00000) Rank: 20/87 |
| Avg | 2048.0 | 382.58 | 75.42 Rank: 17/87 |
971.63 Rank: 16/87 |
3.097 Rank: 27/87 |
7.06293 Rank: 70/87 |
0.44918 (±0.00000) Rank: 3/87 |
0.49760 (±0.00000) Rank: 5/87 |
In the multi-view track we reconstruct the scene with Structure-from-Motion (Colmap) with small sets of images. We show the results for one bag of 10 images. Keypoints are drawn in blue if they are part of the model, and in red otherwise.
— Lizard —

— Pond —




— Tree —


Google Urban dataset / Stereo track
mAA at 10 degrees: 0.40210 (±0.00000 over 1 run(s) / ±0.13924 over 17 scenes)
Rank (per category): 19 (of 87)
| Scene | Features | Matches (raw) |
Matches (final) |
mAA(5o) | mAA(10o) |
| Amsterdam (AMS) | 2048.0 | — | 289.6 | 0.26339 (±0.00000) Rank: 12/87 |
0.41027 (±0.00000) Rank: 12/87 |
| Bangkok (BGK) | 2048.0 | — | 413.4 | 0.06452 (±0.00000) Rank: 18/87 |
0.18114 (±0.00000) Rank: 17/87 |
| Barcelona (BCN) | 2046.3 | — | 297.6 | 0.10769 (±0.00000) Rank: 32/87 |
0.18352 (±0.00000) Rank: 36/87 |
| Buenos Aires (BAR) | 2048.0 | — | 286.9 | 0.20731 (±0.00000) Rank: 12/87 |
0.35845 (±0.00000) Rank: 29/87 |
| Cambridge (CAM) | 2047.6 | — | 297.1 | 0.29932 (±0.00000) Rank: 12/87 |
0.44521 (±0.00000) Rank: 27/87 |
| Cannes (CAN) | 2048.0 | — | 354.9 | 0.39078 (±0.00000) Rank: 29/87 |
0.51198 (±0.00000) Rank: 27/87 |
| Chicago (CHI) | 2048.0 | — | 240.9 | 0.20519 (±0.00000) Rank: 16/87 |
0.33880 (±0.00000) Rank: 16/87 |
| Helsinki (HEL) | 2048.0 | — | 527.1 | 0.39124 (±0.00000) Rank: 10/87 |
0.59459 (±0.00000) Rank: 3/87 |
| Madrid (MAD) | 2048.0 | — | 220.5 | 0.09179 (±0.00000) Rank: 13/87 |
0.19848 (±0.00000) Rank: 20/87 |
| Mountain View (MTV) | 2048.0 | — | 265.3 | 0.23203 (±0.00000) Rank: 19/87 |
0.38555 (±0.00000) Rank: 17/87 |
| New Orleans (NOR) | 2039.2 | — | 253.2 | 0.28580 (±0.00000) Rank: 13/87 |
0.39112 (±0.00000) Rank: 18/87 |
| San Francisco (SF) | 2048.0 | — | 336.9 | 0.19160 (±0.00000) Rank: 28/87 |
0.34331 (±0.00000) Rank: 26/87 |
| Singapore (SG) | 2048.0 | — | 286.1 | 0.34747 (±0.00000) Rank: 9/87 |
0.46741 (±0.00000) Rank: 17/87 |
| Sydney (SYD) | 2048.0 | — | 318.3 | 0.34410 (±0.00000) Rank: 16/87 |
0.50568 (±0.00000) Rank: 15/87 |
| Tokyo (TOK) | 2048.0 | — | 368.2 | 0.59461 (±0.00000) Rank: 27/87 |
0.74167 (±0.00000) Rank: 21/87 |
| Toronto (TOR) | 2048.0 | — | 236.4 | 0.24000 (±0.00000) Rank: 5/87 |
0.39680 (±0.00000) Rank: 6/87 |
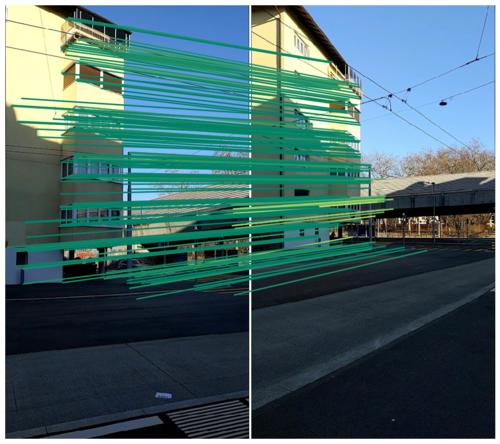
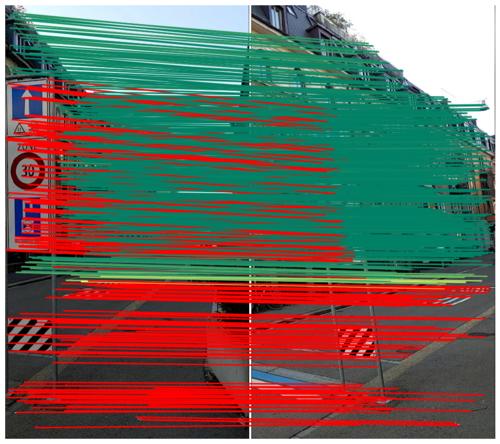
| Zurich (ZRH) | 2048.0 | — | 354.9 | 0.28385 (±0.00000) Rank: 5/87 |
0.38179 (±0.00000) Rank: 4/87 |
| Average (Avg) | 2047.4 | — | 314.5 | 0.26710 (±0.00000) Rank: 16/87 |
0.40210 (±0.00000) Rank: 19/87 |
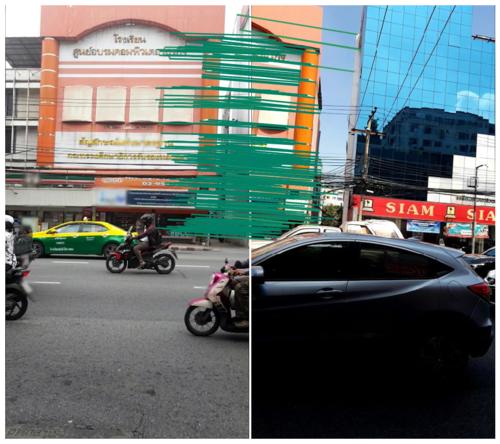
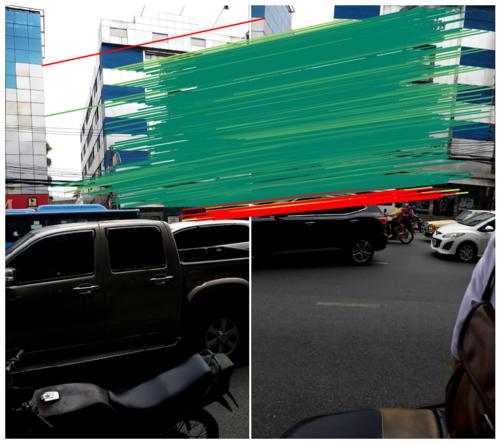
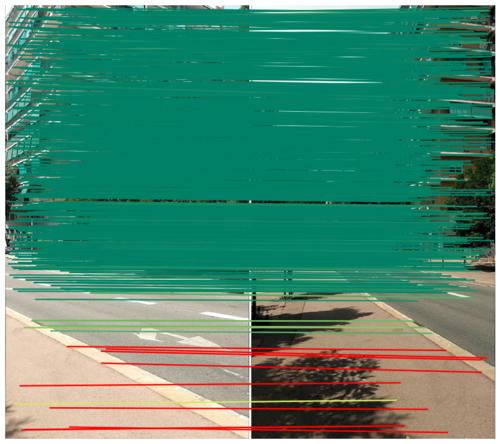
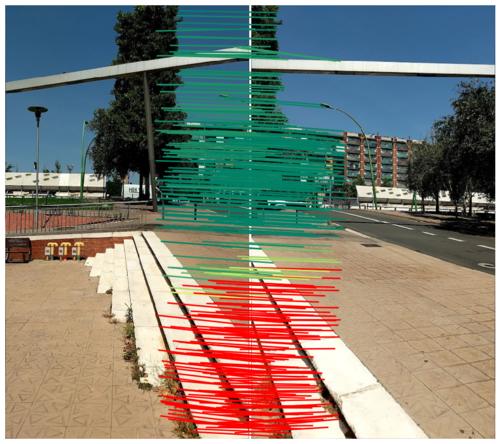
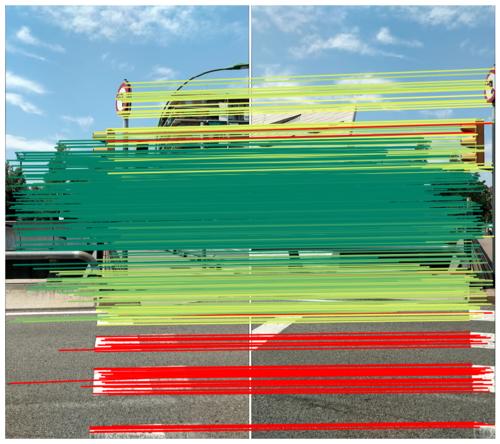
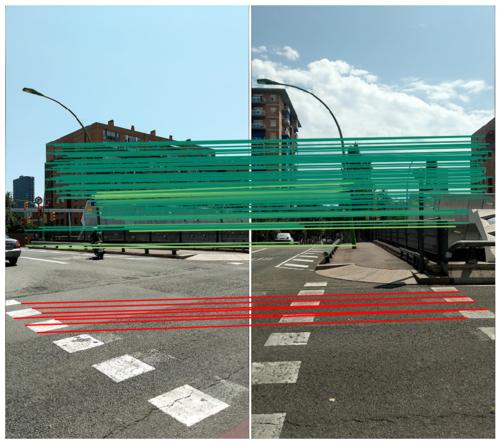
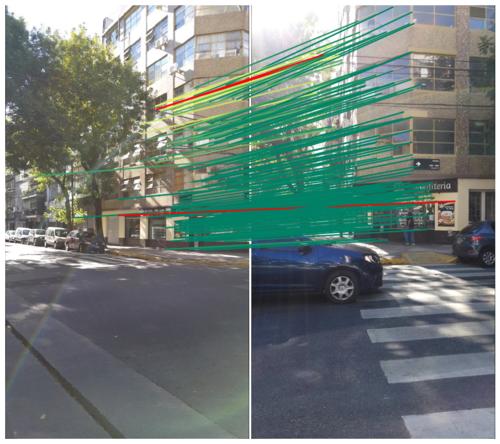
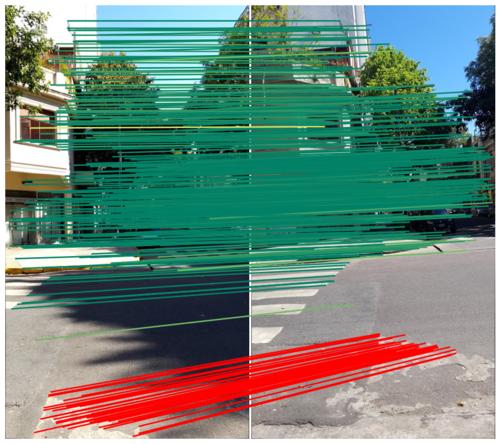
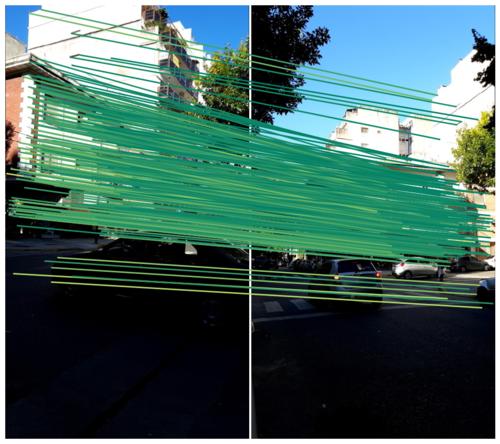
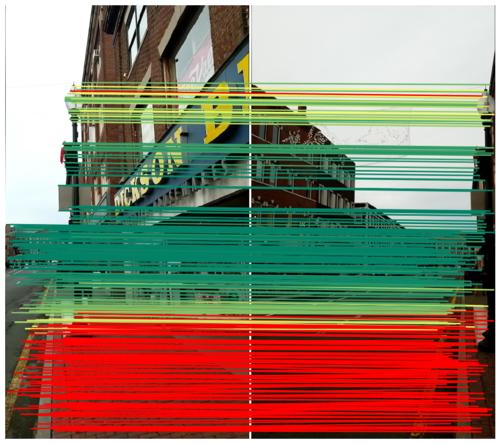
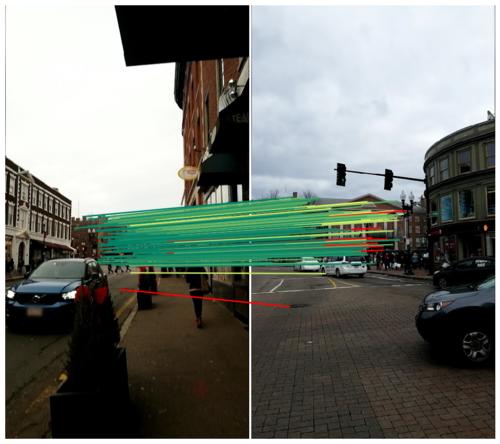
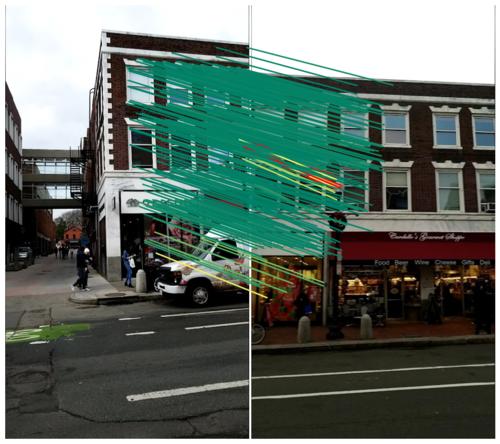
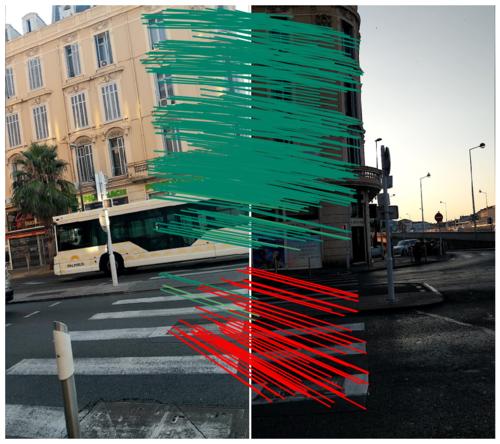
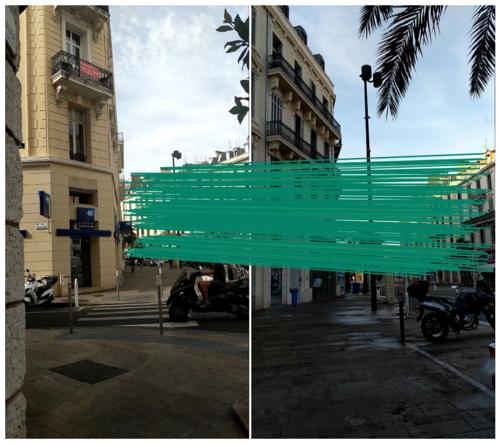
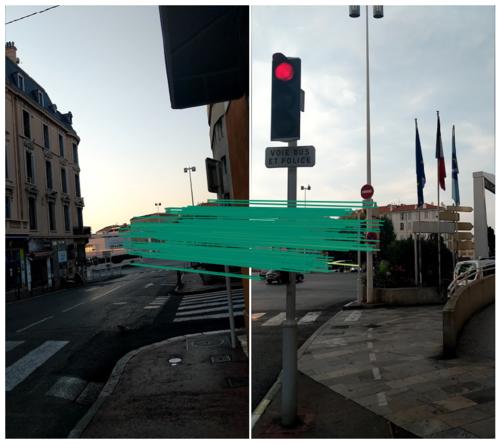
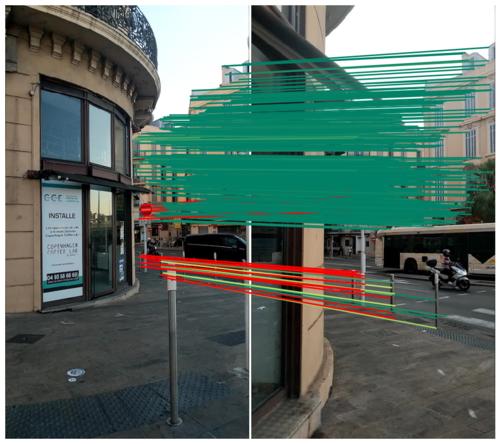
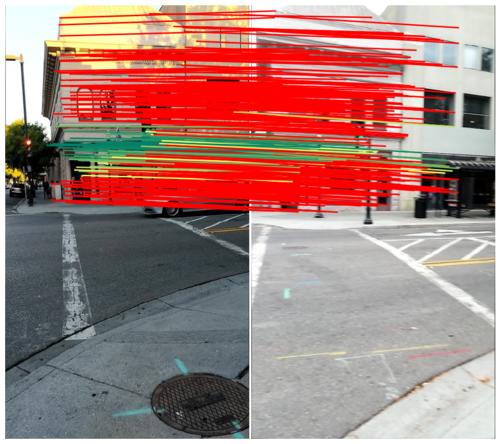
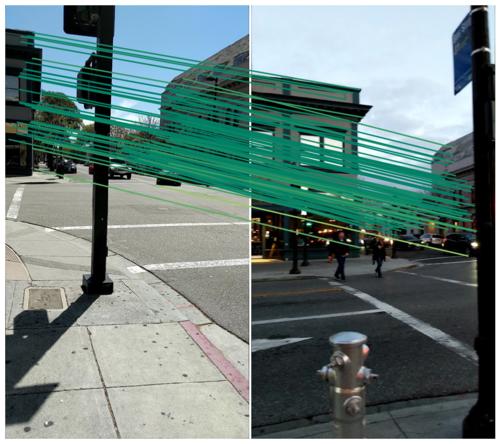
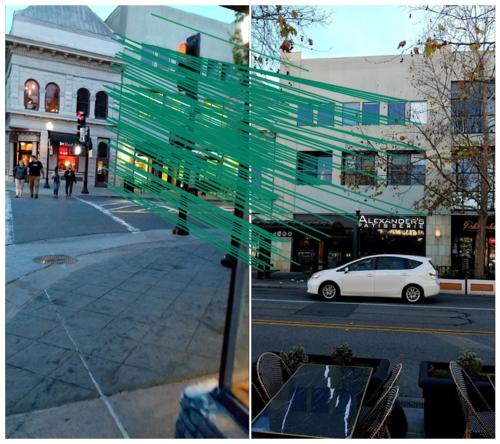
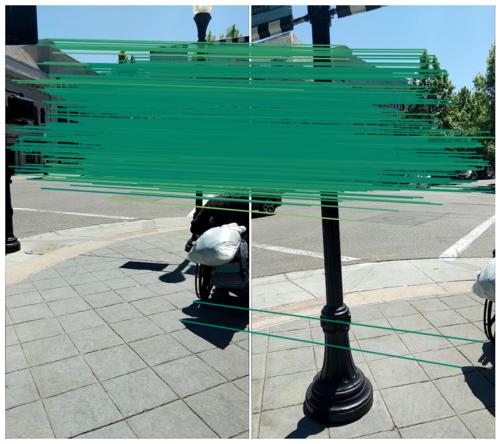
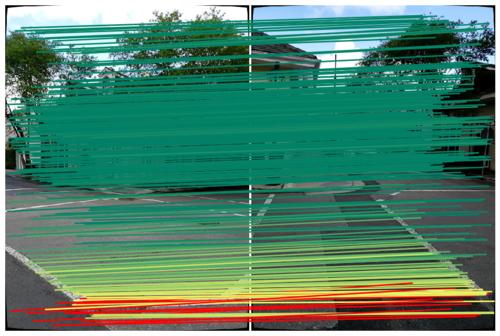
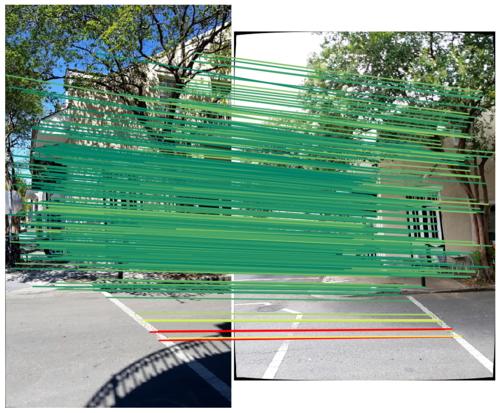
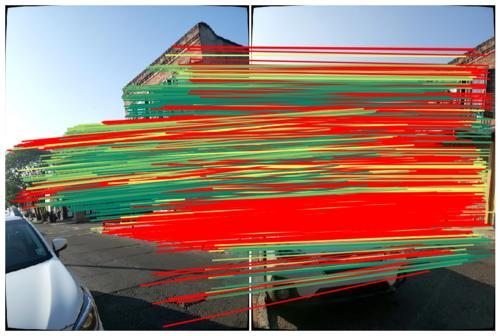
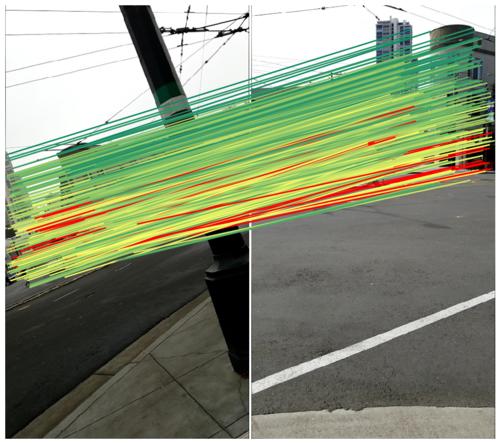
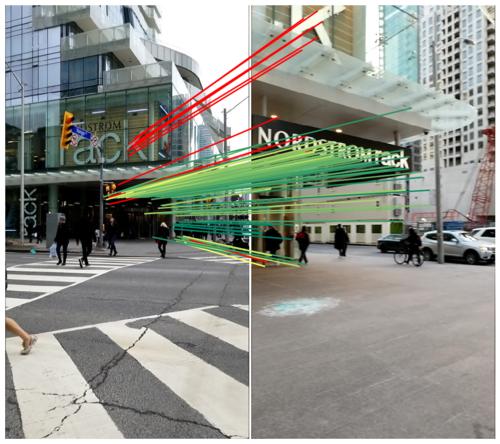
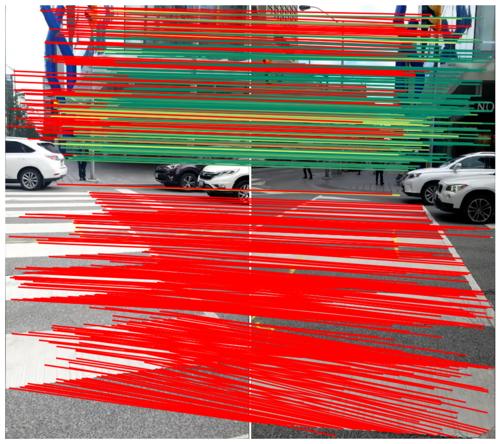
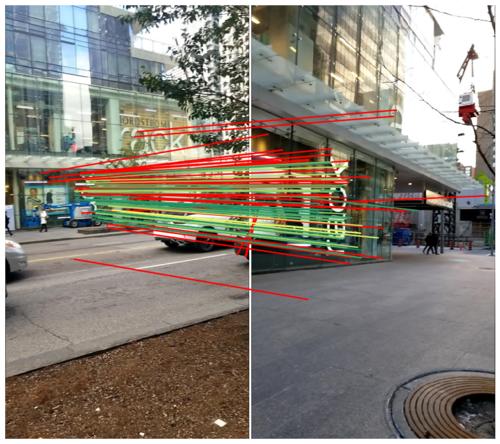
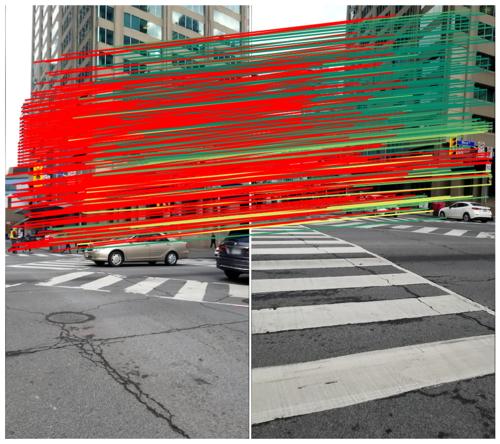
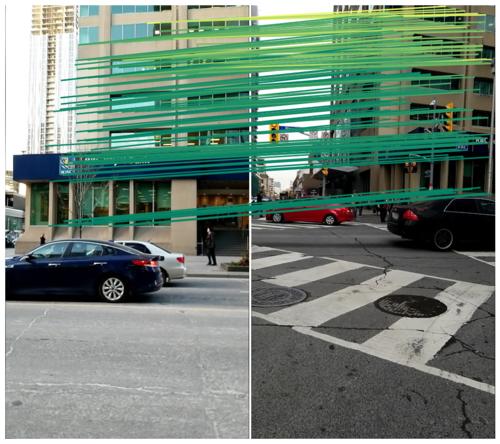
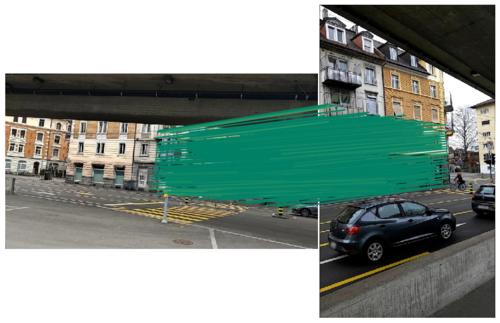
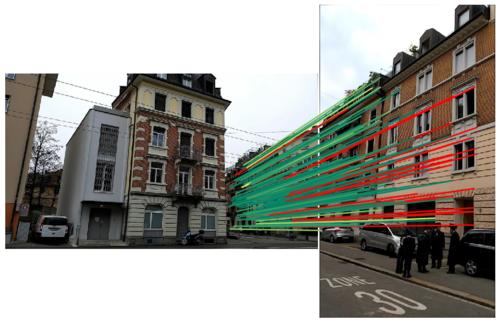
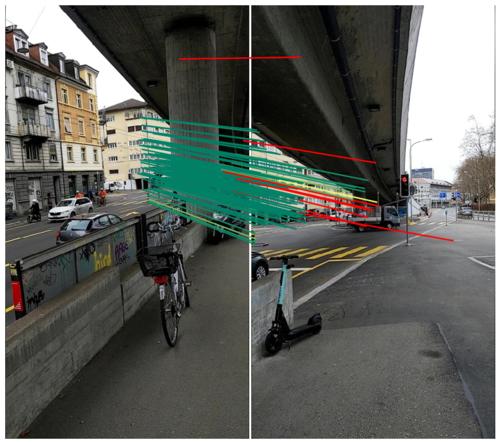
We show the inliers that survive the robust estimation loop (i.e. RANSAC), or those supplied with the submission if using custom matches. As the dataset does not contain depth, we color them based on the symmetric epopilar distance on normalized coordinates: from 0 (green) to 2e-4 (yellow), and in red above it. Note that these occasionally contain false positives.
— Amsterdam —






— Bangkok —







— Barcelona —






— Buenos Aires —







— Cambridge —





— Cannes —



— Chicago —





— Helsinki —

— Madrid —





— Mountain View —




— New Orleans —





— San Francisco —







— Singapore —










— Sydney —






— Tokyo —




— Toronto —





— Zurich —

Google Urban dataset / Multiview track
mAA at 10 degrees: N/A (±0.00000 over 1 run(s) / ±0.15889 over 17 scenes)
Rank (per category): 25 (of 87)
| Scene | Features | Matches (input) |
RegistrationRatio (%) | Number of Landmarks |
Track Length | ATE | mAA(50) | mAA(100) |
| AMS | 2048.0 | 201.48 | 93.87 Rank: 5/87 |
1501.84 Rank: 8/87 |
3.811 Rank: 21/87 |
29.34326 Rank: 52/87 |
0.38304 (±0.00000) Rank: 8/87 |
0.51491 (±0.00000) Rank: 3/87 |
| BGK | 2048.0 | 298.43 | 96.80 Rank: 22/87 |
2538.90 Rank: 13/87 |
3.628 Rank: 35/87 |
14.67347 Rank: 41/87 |
0.03099 (±0.00000) Rank: 11/87 |
0.09487 (±0.00000) Rank: 14/87 |
| BCN | 2046.3 | 195.82 | 88.27 Rank: 2/87 |
1353.23 Rank: 9/87 |
3.645 Rank: 36/87 |
25.55230 Rank: 17/87 |
0.13167 (±0.00000) Rank: 27/87 |
0.20540 (±0.00000) Rank: 29/87 |
| BAR | 2048.0 | 181.69 | 89.93 Rank: 3/87 |
1333.86 Rank: 8/87 |
3.348 Rank: 32/87 |
16.57564 Rank: 33/87 |
0.14807 (±0.00000) Rank: 30/87 |
0.25521 (±0.00000) Rank: 29/87 |
| CAM | 2047.6 | 210.20 | 90.27 Rank: 4/87 |
1335.17 Rank: 15/87 |
3.464 Rank: 33/87 |
24.95323 Rank: 21/87 |
0.14927 (±0.00000) Rank: 33/87 |
0.23750 (±0.00000) Rank: 32/87 |
| CAN | 2048.0 | 212.40 | 83.33 Rank: 2/87 |
1116.54 Rank: 2/87 |
3.441 Rank: 32/87 |
20.94883 Rank: 34/87 |
0.07798 (±0.00000) Rank: 18/87 |
0.12601 (±0.00000) Rank: 24/87 |
| CHI | 2048.0 | 217.05 | 90.85 Rank: 7/87 |
589.23 Rank: 22/87 |
5.275 Rank: 2/87 |
48.34079 Rank: 40/87 |
0.14861 (±0.00000) Rank: 18/87 |
0.25887 (±0.00000) Rank: 14/87 |
| HEL | 2048.0 | 390.36 | 94.13 Rank: 23/87 |
2351.42 Rank: 17/87 |
4.031 Rank: 21/87 |
13.39467 Rank: 17/87 |
0.34047 (±0.00000) Rank: 24/87 |
0.46490 (±0.00000) Rank: 28/87 |
| MAD | 2048.0 | 161.02 | 92.60 Rank: 3/87 |
1559.72 Rank: 3/87 |
3.211 Rank: 41/87 |
4.59662 Rank: 14/87 |
0.09218 (±0.00000) Rank: 29/87 |
0.20011 (±0.00000) Rank: 27/87 |
| MTV | 2048.0 | 206.27 | 92.86 Rank: 8/87 |
1524.70 Rank: 14/87 |
3.789 Rank: 35/87 |
15.34824 Rank: 14/87 |
0.30175 (±0.00000) Rank: 6/87 |
0.43501 (±0.00000) Rank: 12/87 |
| NOR | 2039.2 | 177.52 | 91.33 Rank: 6/87 |
1371.96 Rank: 5/87 |
3.411 Rank: 16/87 |
13.18654 Rank: 29/87 |
0.25781 (±0.00000) Rank: 26/87 |
0.35437 (±0.00000) Rank: 26/87 |
| SF | 2048.0 | 242.92 | 95.60 Rank: 25/87 |
1789.82 Rank: 12/87 |
3.645 Rank: 33/87 |
19.02815 Rank: 19/87 |
0.25413 (±0.00000) Rank: 33/87 |
0.39275 (±0.00000) Rank: 33/87 |
| SG | 2048.0 | 189.61 | 81.55 Rank: 6/87 |
1200.94 Rank: 13/87 |
3.394 Rank: 16/87 |
18.04254 Rank: 34/87 |
0.24527 (±0.00000) Rank: 15/87 |
0.31313 (±0.00000) Rank: 17/87 |
| SYD | 2048.0 | 211.06 | 93.04 Rank: 2/87 |
1800.04 Rank: 2/87 |
3.583 Rank: 21/87 |
24.67755 Rank: 50/87 |
0.37261 (±0.00000) Rank: 2/87 |
0.46742 (±0.00000) Rank: 2/87 |
| TOK | 2048.0 | 241.69 | 92.80 Rank: 26/87 |
2147.21 Rank: 11/87 |
3.645 Rank: 38/87 |
17.50951 Rank: 52/87 |
0.65336 (±0.00000) Rank: 29/87 |
0.72751 (±0.00000) Rank: 29/87 |
| TOR | 2048.0 | 162.45 | 90.67 Rank: 3/87 |
1509.82 Rank: 9/87 |
3.180 Rank: 37/87 |
17.14966 Rank: 29/87 |
0.17933 (±0.00000) Rank: 31/87 |
0.31163 (±0.00000) Rank: 31/87 |
| ZRH | 2048.0 | 236.04 | 90.40 Rank: 15/87 |
1745.45 Rank: 22/87 |
3.332 Rank: 38/87 |
19.32824 Rank: 29/87 |
0.07891 (±0.00000) Rank: 36/87 |
0.14047 (±0.00000) Rank: 35/87 |
| Avg | 2047.4 | 219.77 | 91.08 Rank: 1/87 |
1574.70 Rank: 6/87 |
3.637 Rank: 27/87 |
20.15584 Rank: 30/87 |
0.22620 (±0.00000) Rank: 27/87 |
0.32353 (±0.00000) Rank: 25/87 |
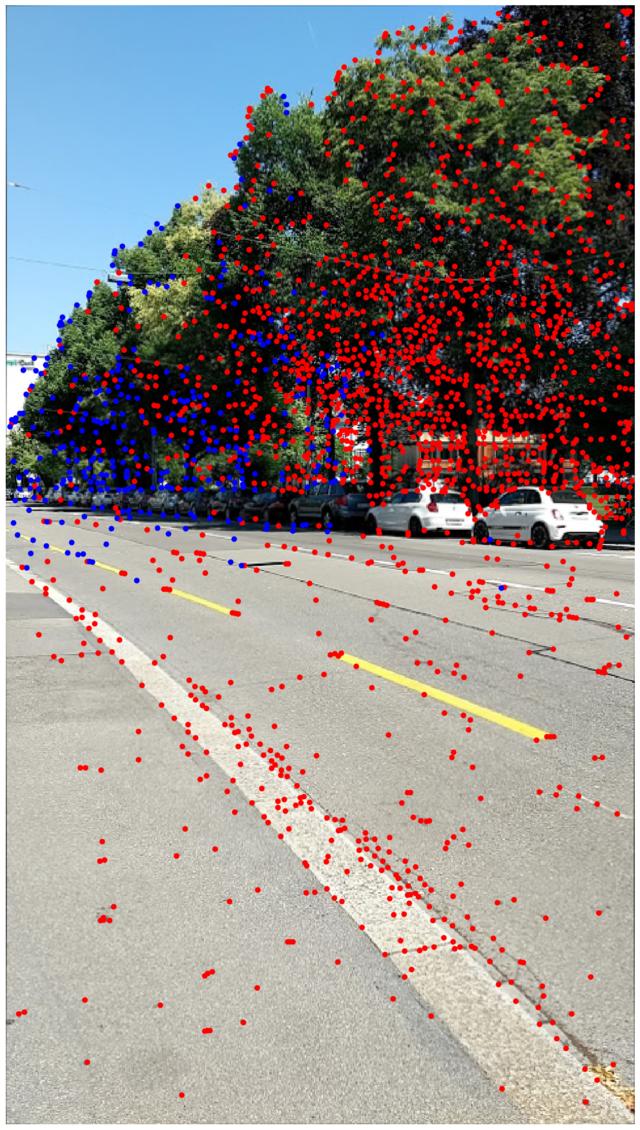
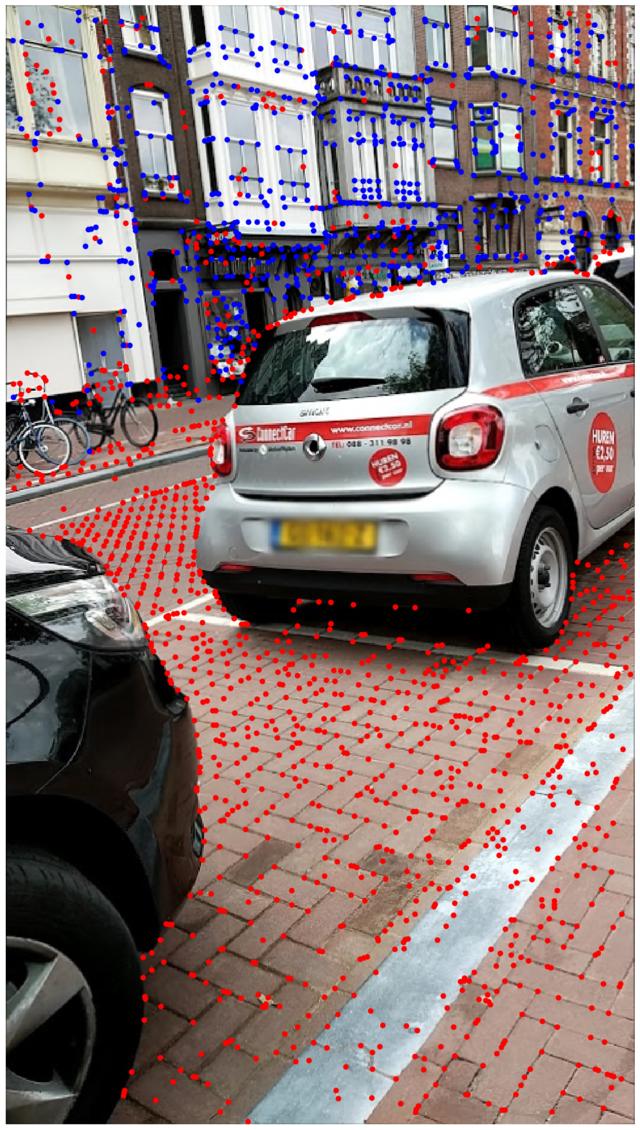
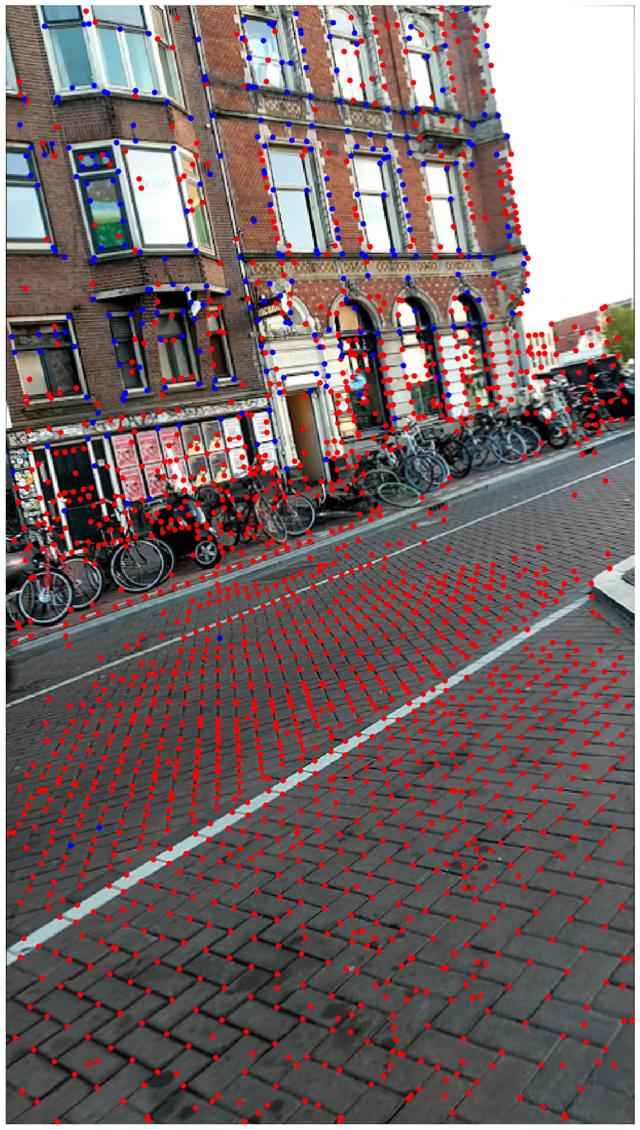
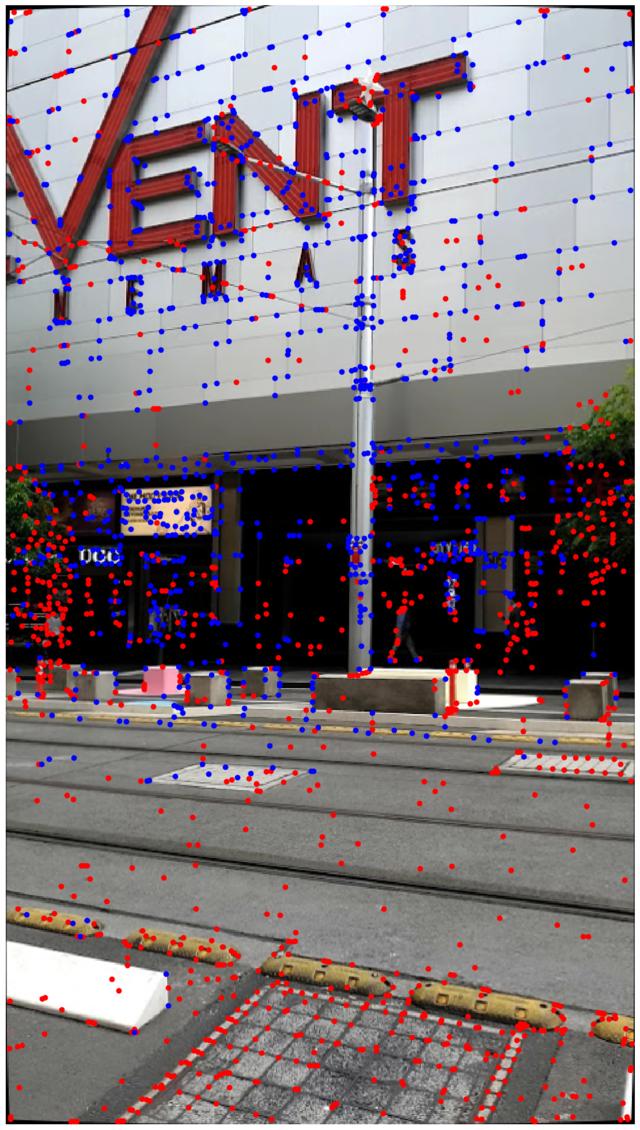
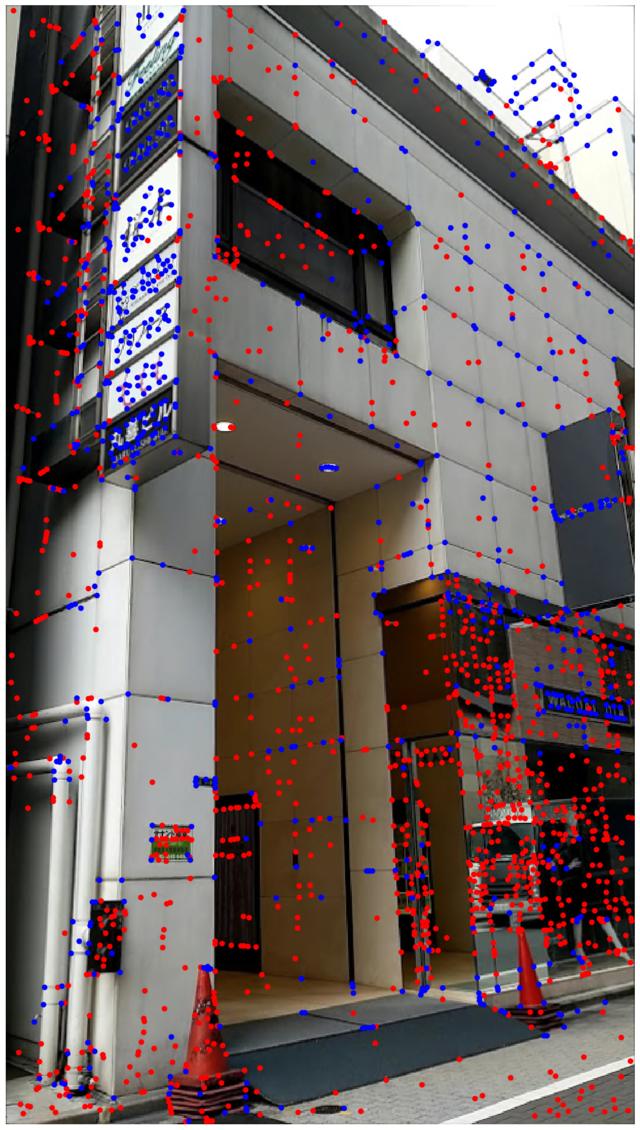
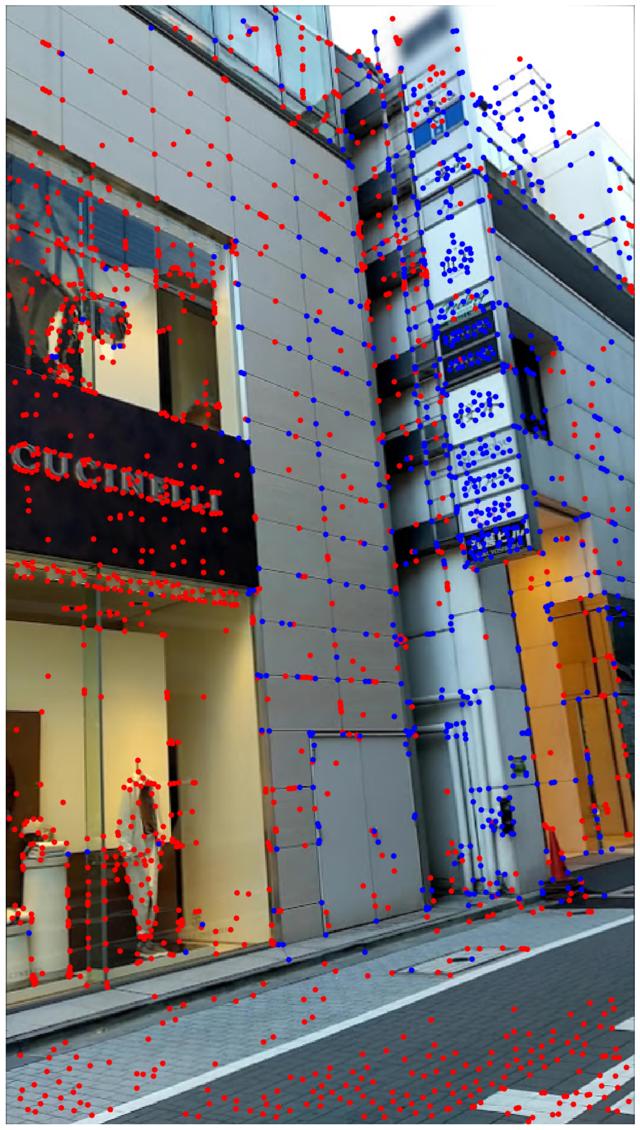
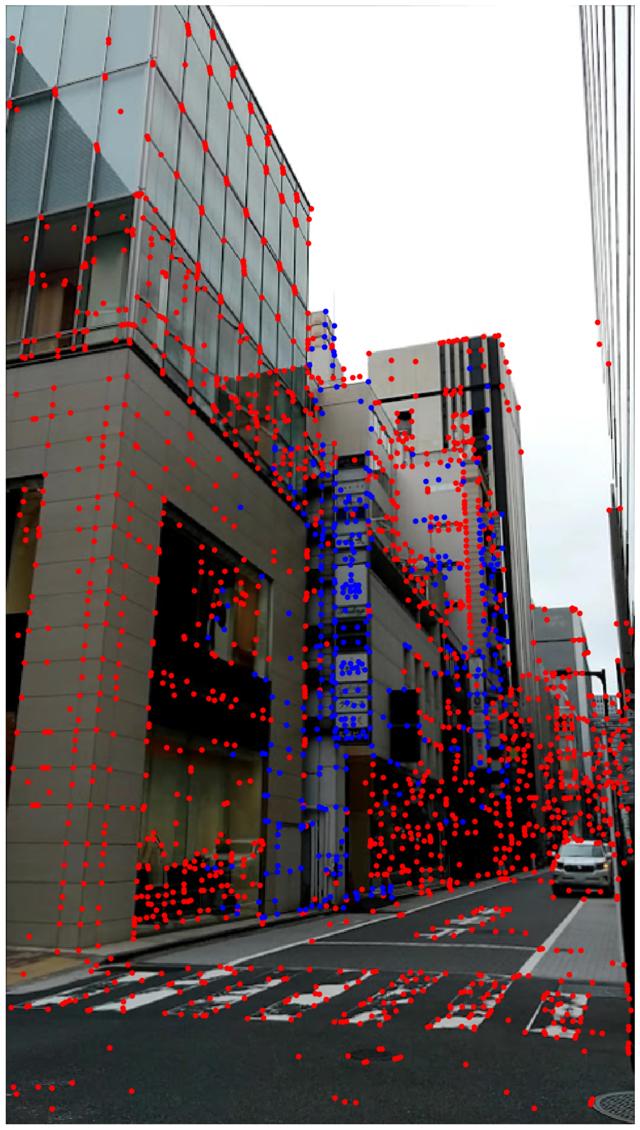
In the multi-view track we reconstruct the scene with Structure-from-Motion (Colmap) with small sets of images. We show the results for one bag of 10 images. Keypoints are drawn in blue if they are part of the model, and in red otherwise.
— Amsterdam —



— Bangkok —

— Barcelona —

— Buenos Aires —




— Cambridge —



— Cannes —

— Chicago —
— Helsinki —


— Madrid —







— Mountain View —



— New Orleans —




— San Francisco —
— Singapore —



— Sydney —

— Tokyo —

— Toronto —




— Zurich —