Submission ID: 8629aafc
HarrisZ improved, Blob DTM + AdaLAM
Processed: 21-06-13. Download link: 8629aafc18a0a156-harrisz-2k-blobdtmadalam.json
This page ranks the submission against all others using the same number of keypoints, regardless of descriptor size. Please hover over table headers for descriptions on metrics and full scene names.
- Phototourism dataset: Stereo track / Multiview track
- Prague Parks dataset: Stereo track / Multiview track
- Google Urban dataset: Stereo track / Multiview track
Metadata
- Authors: Fabio Bellavia and Dmytro Mishkin (contact)
- Keypoint: hzbnn22l05m2k2l
- Descriptor: hardnet (128 float32: 512 bytes)
- Number of features: 2048
- Summary: Baseline submission for HarrisZ detector evaluation with Blob DTM matcher and then AdaLAM filtering (descriptor: AffNet+HardNet8, RANSAC: DEGENSAC)
- Paper: https://digital-library.theiet.org/content/journals/10.1049/iet-cvi.2009.0127
- Website: N/A
- Processing date: 21-06-13
Phototourism dataset / Stereo track
mAA at 10 degrees: 0.43697 (±0.00000 over 1 run(s) / ±0.15880 over 9 scenes)
Rank (per category): 60 (of 87)
| Scene | Features | Matches (raw) |
Matches (final) |
Rep. @ 3 px. | MS @ 3 px. | mAA(5o) | mAA(10o) |
| BM | 2048.0 | — | 301.8 | 0.470 Rank: 32/87 |
0.865 Rank: 68/87 |
0.14297 (±0.00000) Rank: 65/87 |
0.22504 (±0.00000) Rank: 68/87 |
| FCS | 2048.0 | — | 272.1 | 0.348 Rank: 79/87 |
0.878 Rank: 14/87 |
0.53865 (±0.00000) Rank: 52/87 |
0.66336 (±0.00000) Rank: 52/87 |
| LMS | 2025.2 | — | 275.7 | 0.329 Rank: 83/87 |
0.653 Rank: 68/87 |
0.49783 (±0.00000) Rank: 56/87 |
0.62319 (±0.00000) Rank: 54/87 |
| LB | 2046.5 | — | 228.1 | 0.336 Rank: 76/87 |
0.707 Rank: 34/87 |
0.37528 (±0.00000) Rank: 65/87 |
0.48369 (±0.00000) Rank: 58/87 |
| MC | 2047.5 | — | 270.3 | 0.401 Rank: 56/87 |
0.892 Rank: 29/87 |
0.26721 (±0.00000) Rank: 65/87 |
0.40223 (±0.00000) Rank: 62/87 |
| MR | 2048.0 | — | 277.7 | 0.355 Rank: 81/87 |
0.898 Rank: 38/87 |
0.21506 (±0.00000) Rank: 58/87 |
0.31155 (±0.00000) Rank: 57/87 |
| PSM | 2048.0 | — | 163.2 | 0.289 Rank: 76/87 |
0.555 Rank: 55/87 |
0.10040 (±0.00000) Rank: 65/87 |
0.18693 (±0.00000) Rank: 65/87 |
| SF | 2048.0 | — | 267.5 | 0.320 Rank: 82/87 |
0.816 Rank: 14/87 |
0.41238 (±0.00000) Rank: 56/87 |
0.54303 (±0.00000) Rank: 57/87 |
| SPC | 2043.3 | — | 225.2 | 0.344 Rank: 72/87 |
0.804 Rank: 27/87 |
0.34909 (±0.00000) Rank: 57/87 |
0.49375 (±0.00000) Rank: 60/87 |
| Avg | 2044.7 | — | 253.5 | 0.355 Rank: 75/87 |
0.785 Rank: 40/87 |
0.32210 (±0.00000) Rank: 59/87 |
0.43697 (±0.00000) Rank: 60/87 |
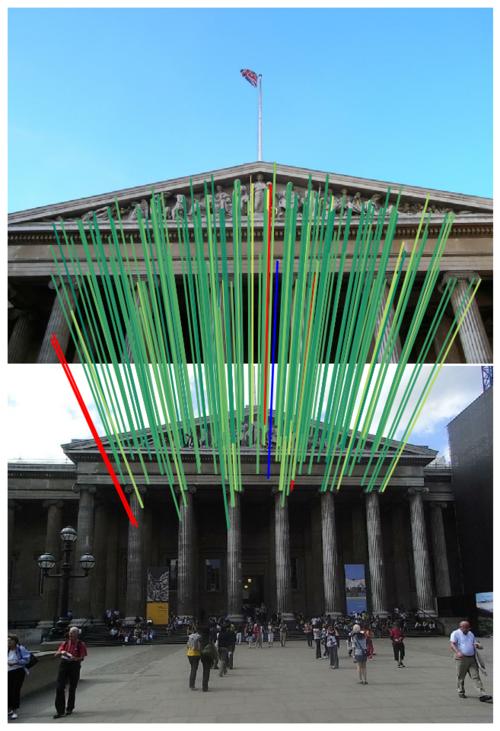
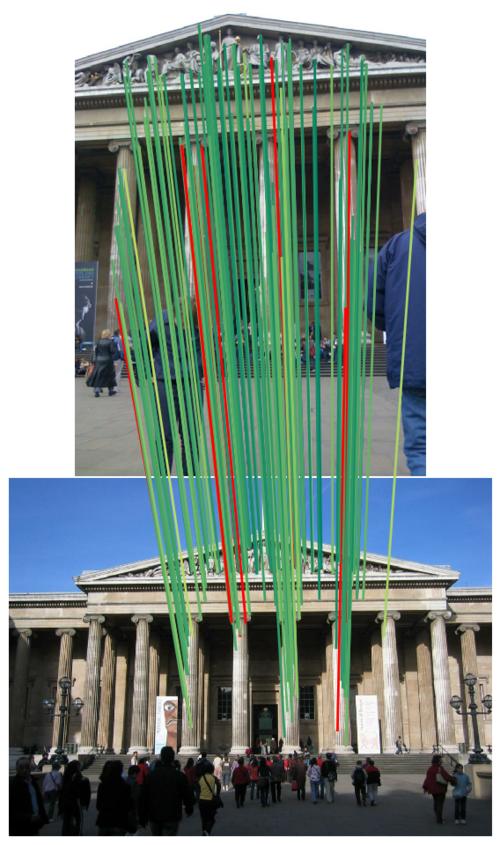
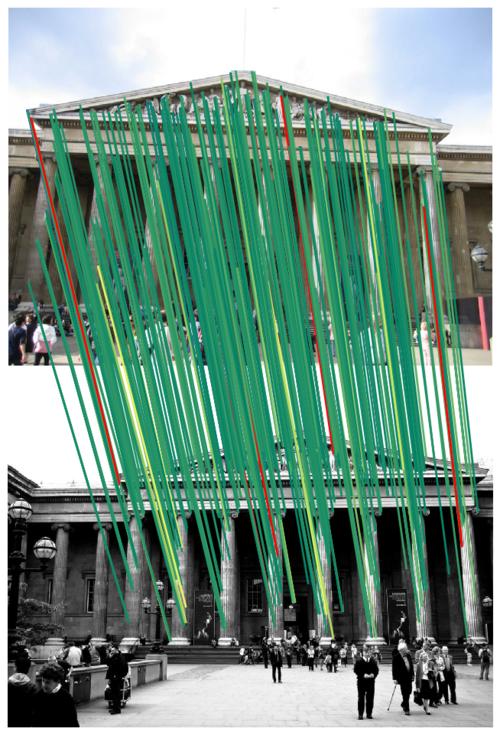
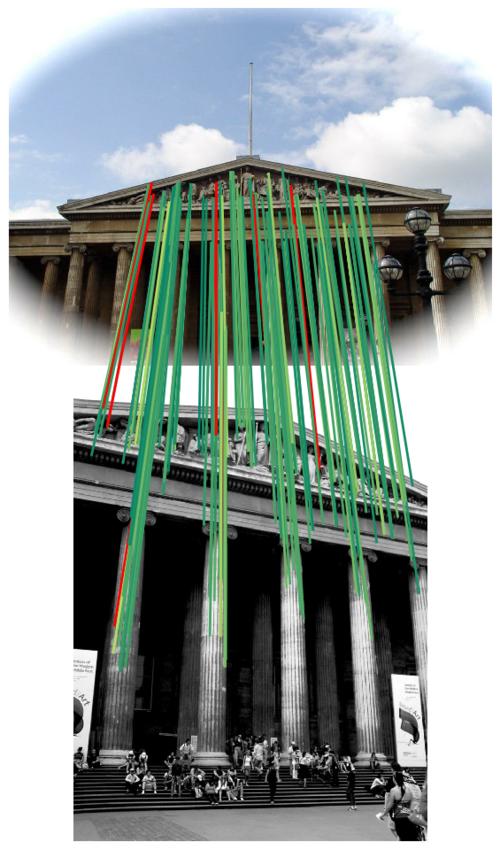
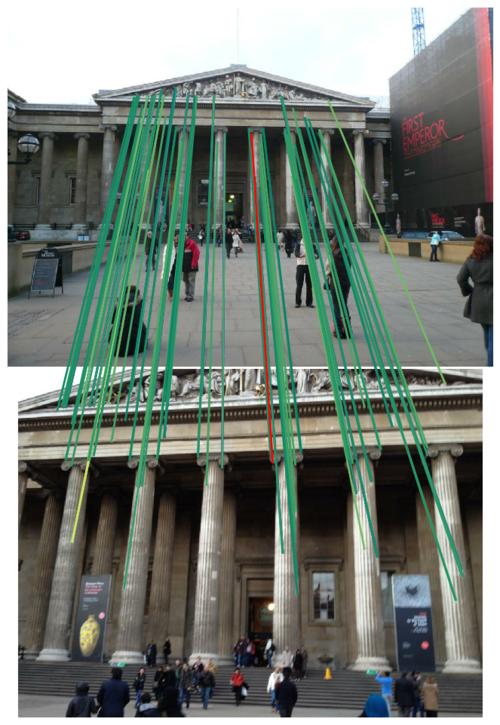
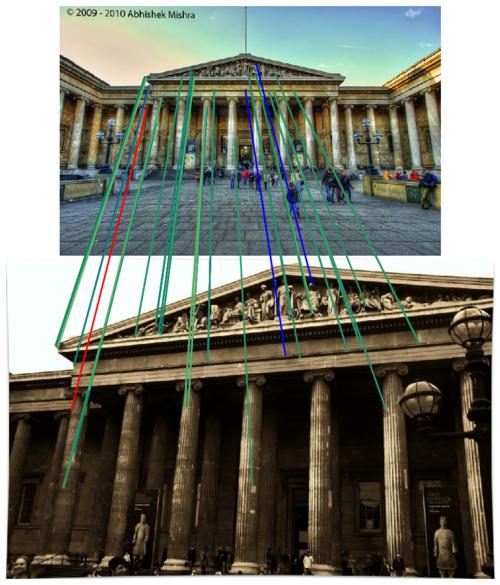
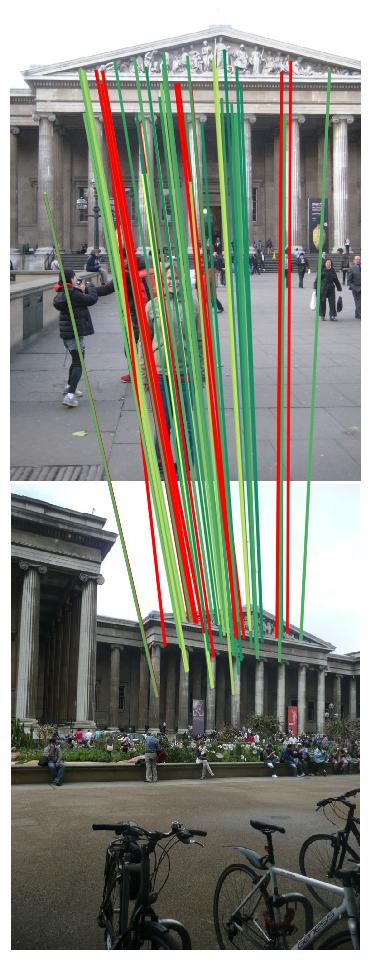
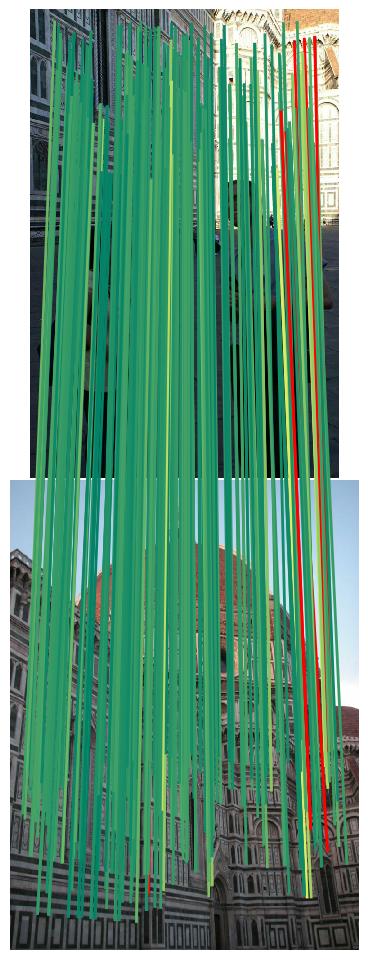
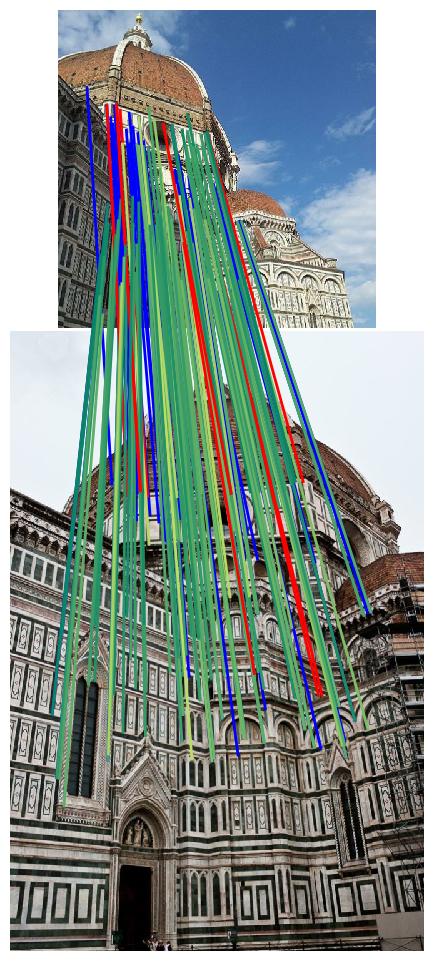
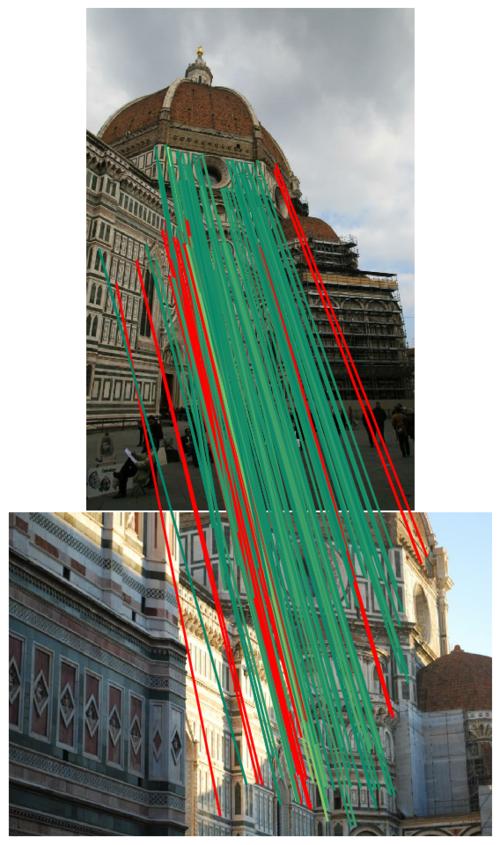
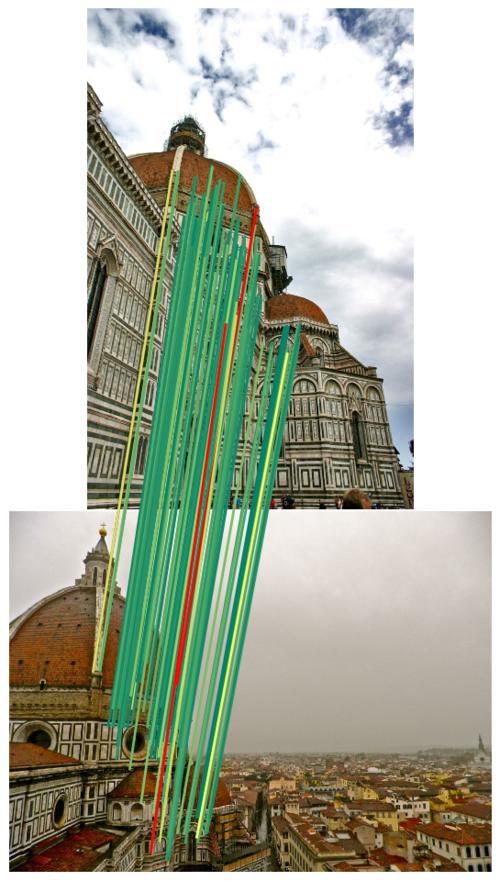
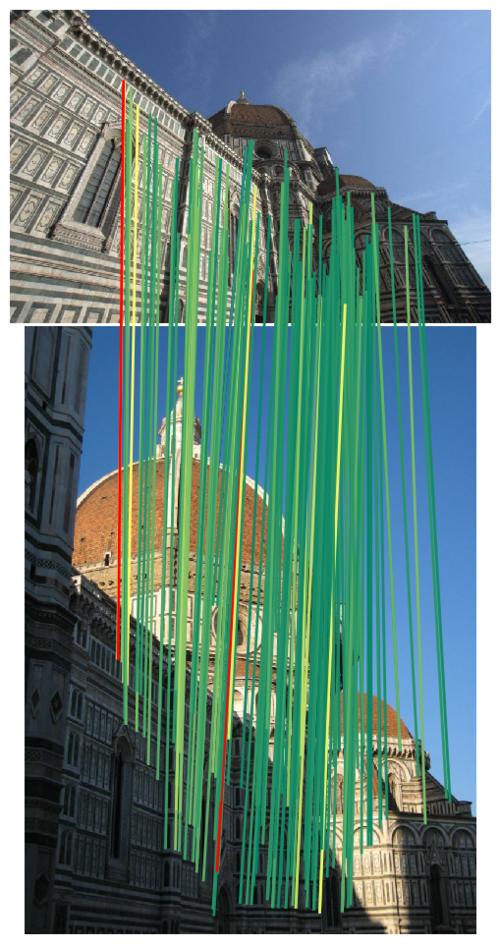
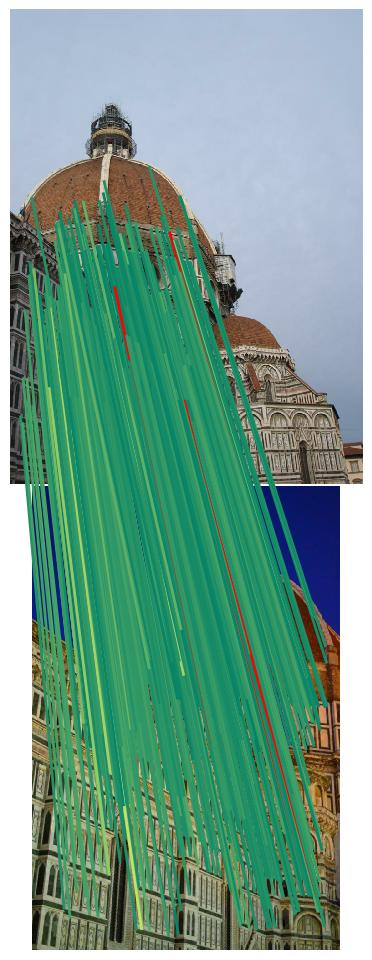
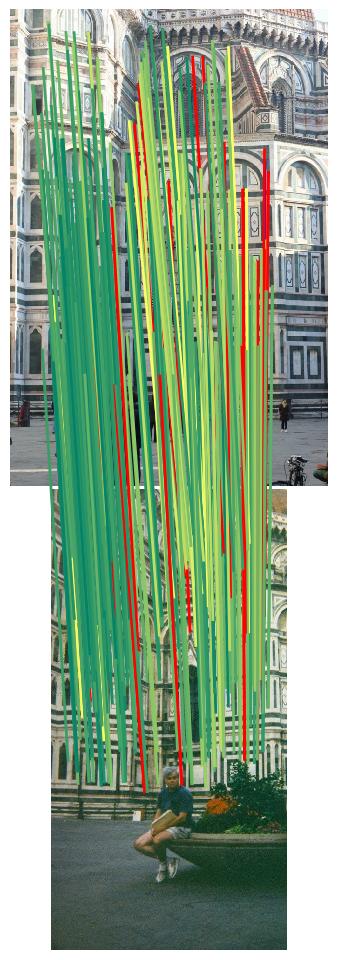
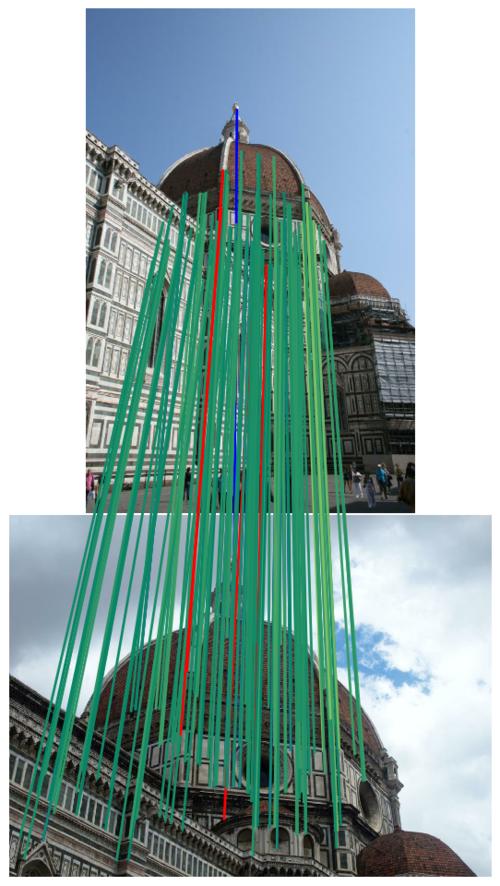
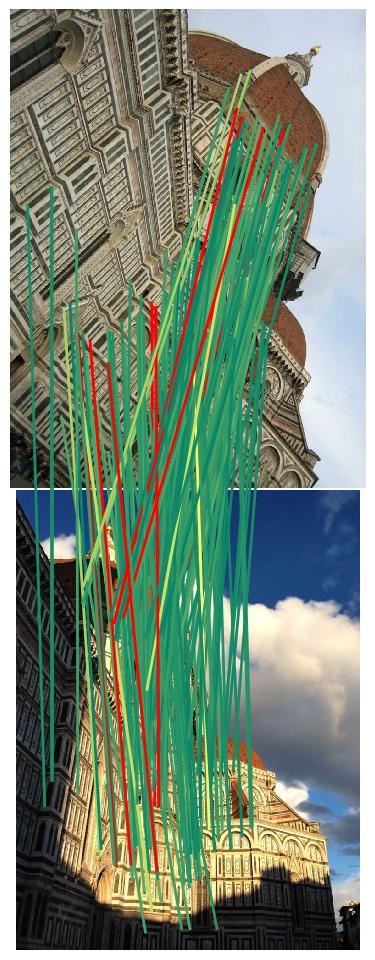
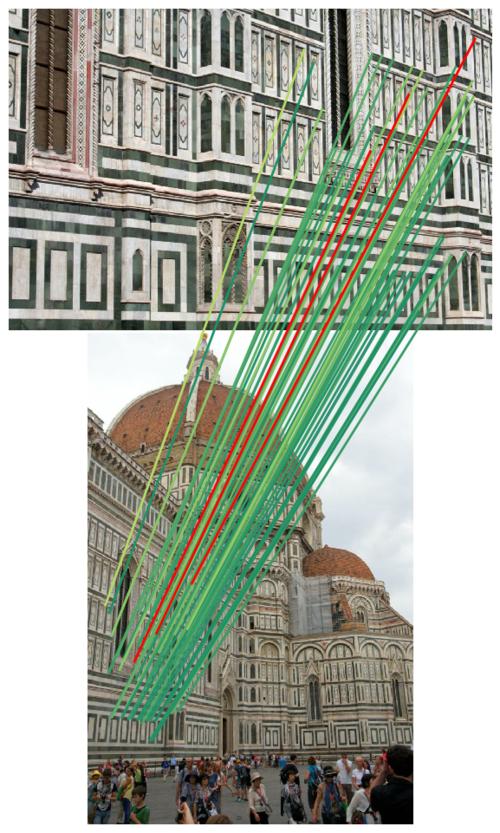
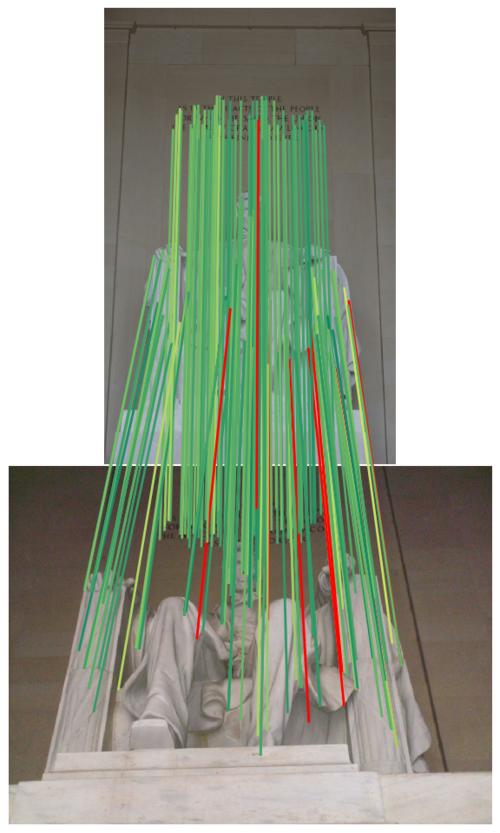
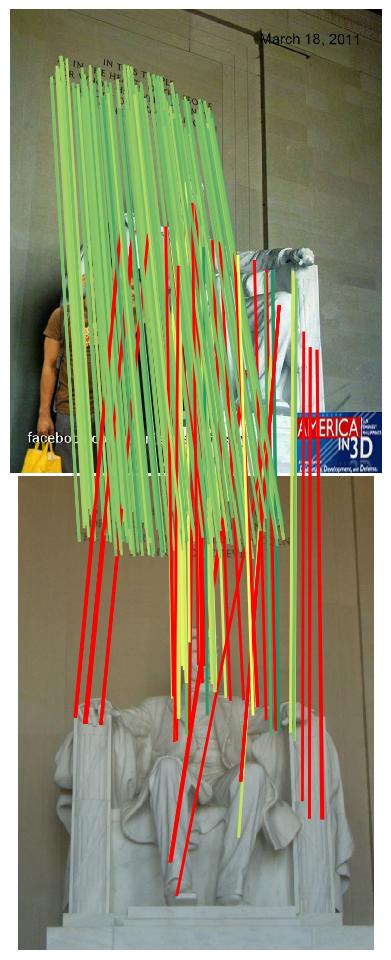
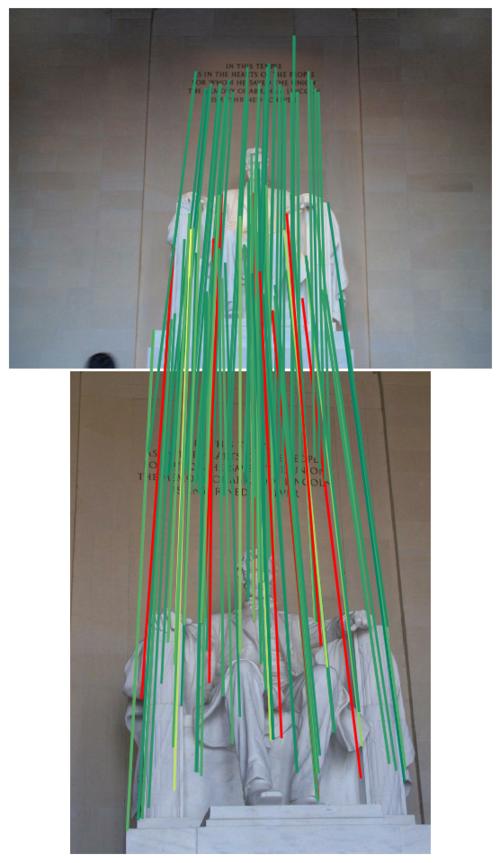
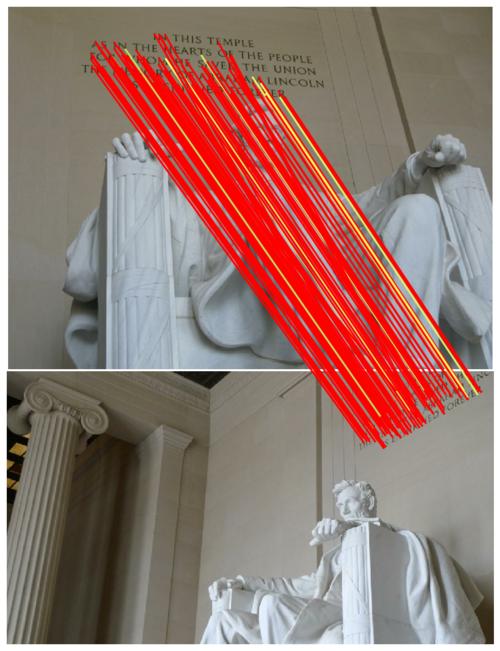
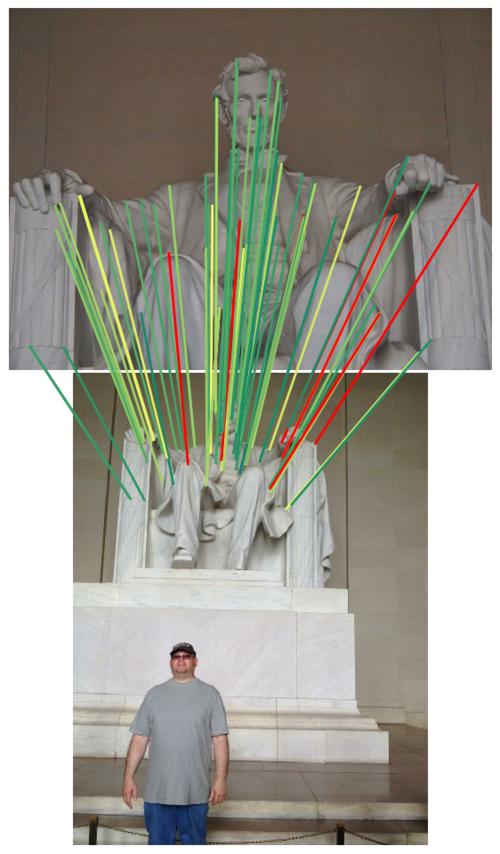
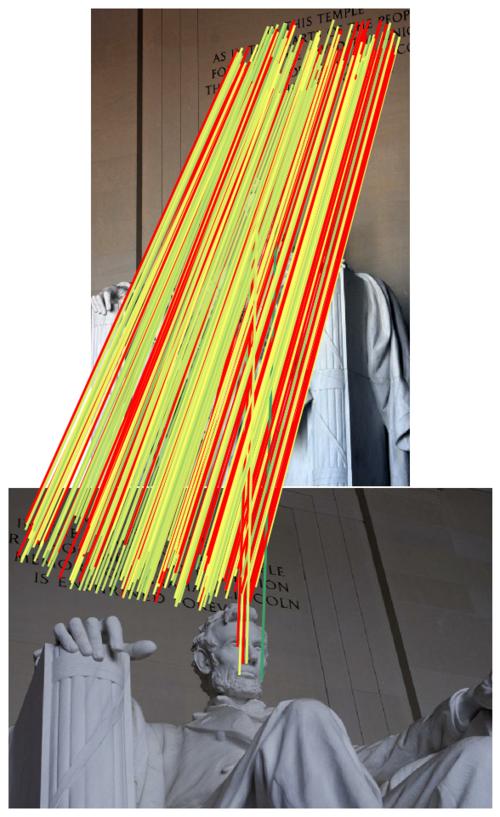
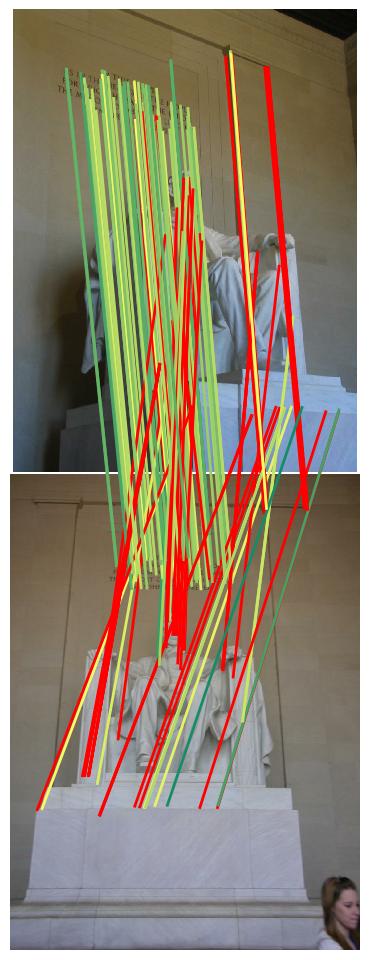
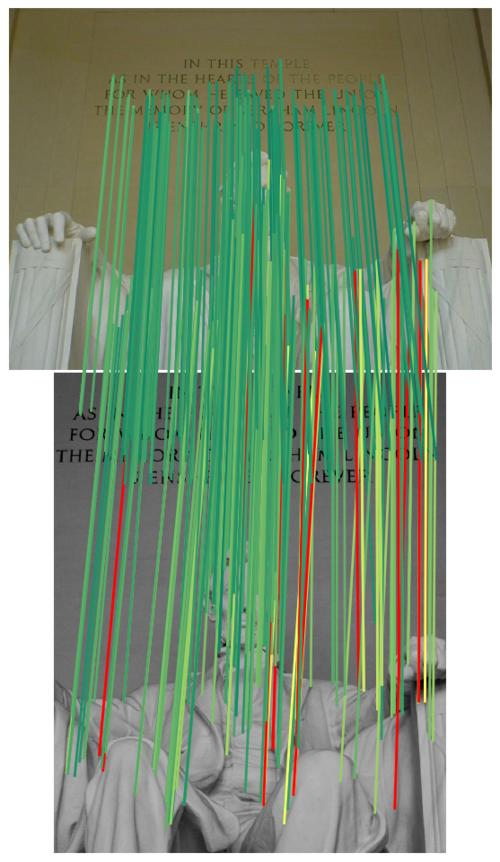
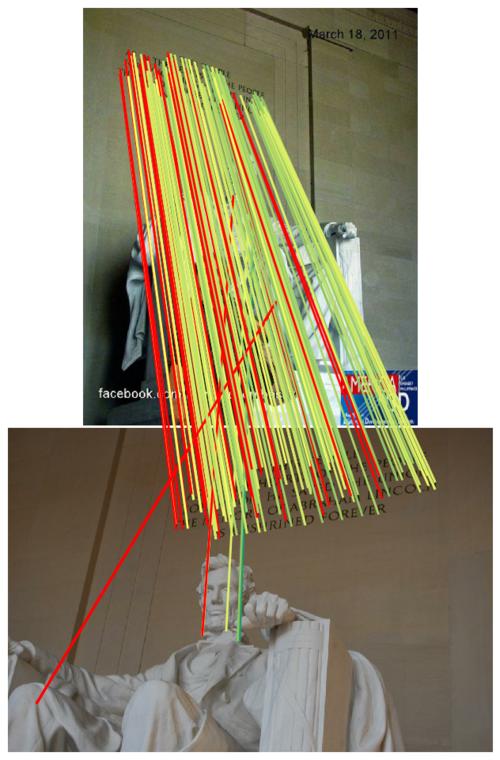
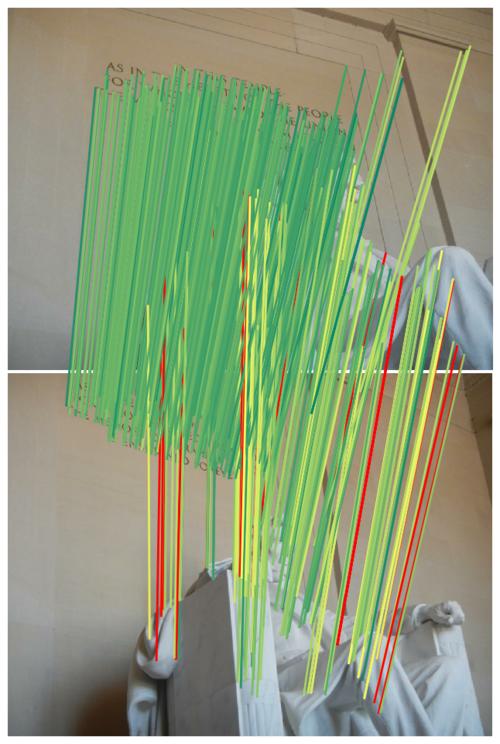
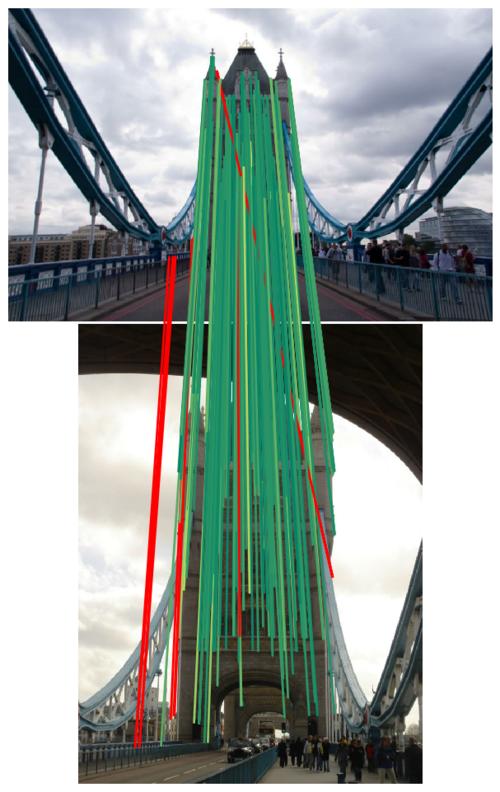
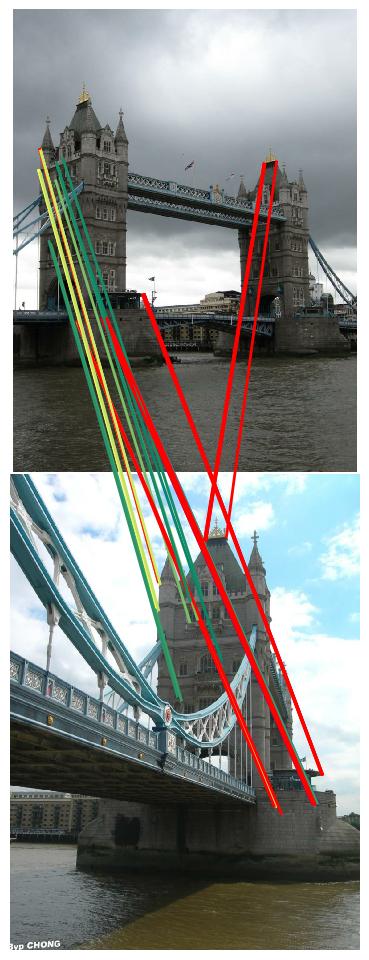
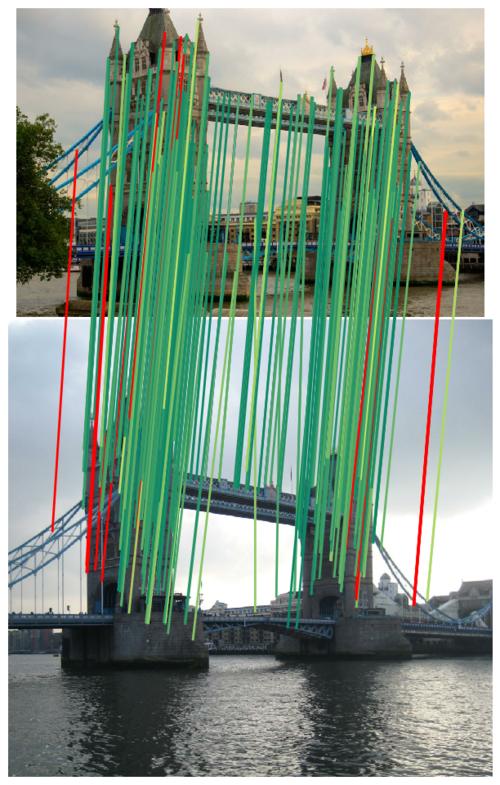
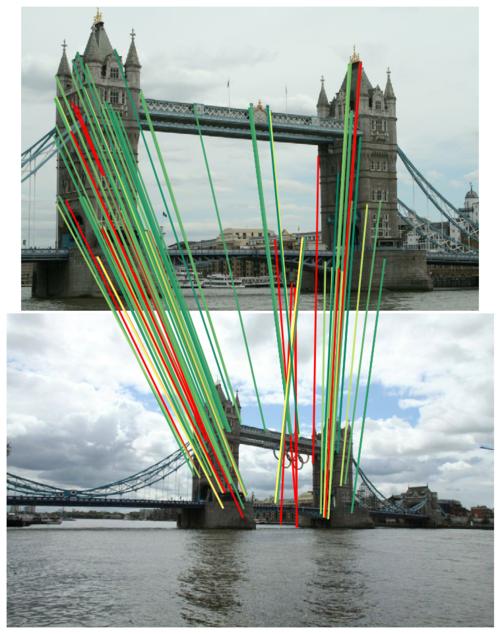
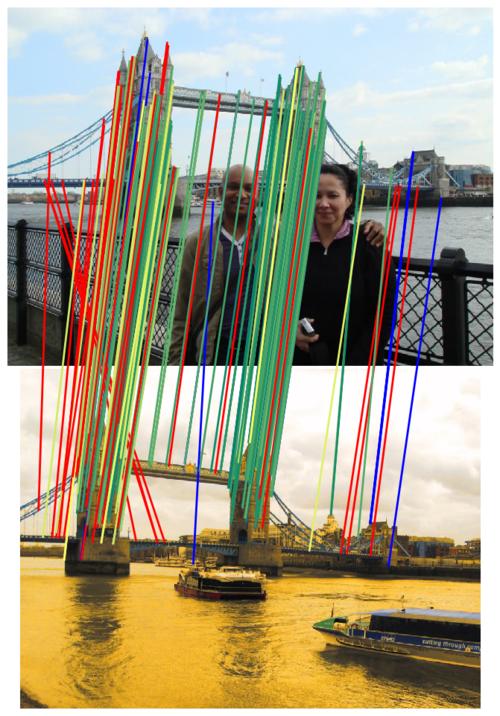
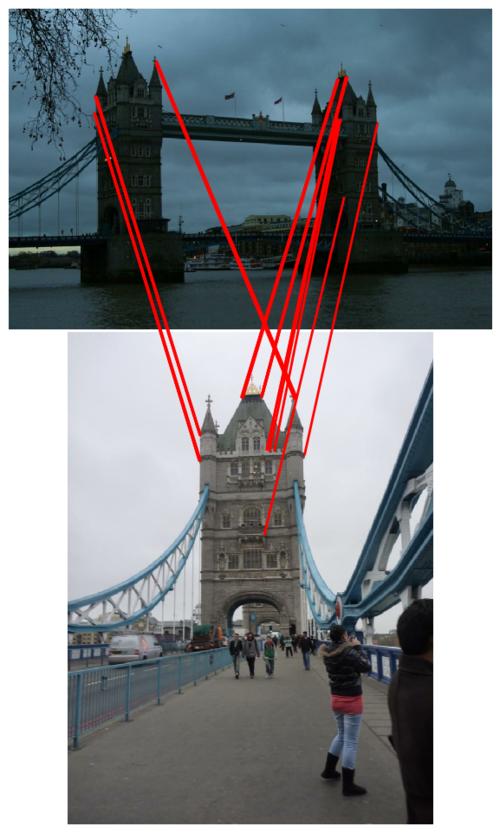
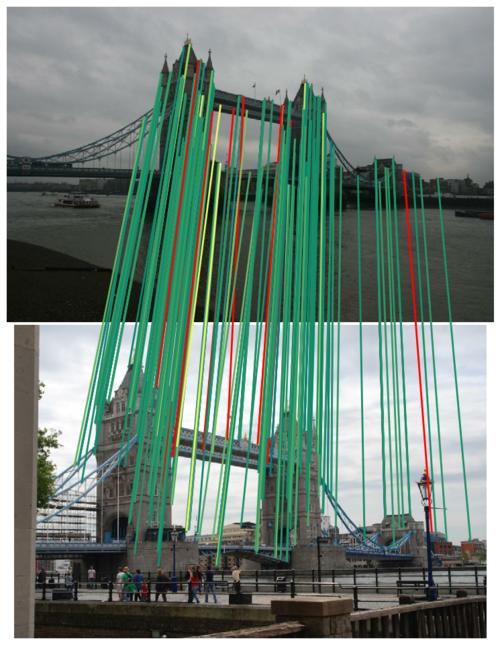
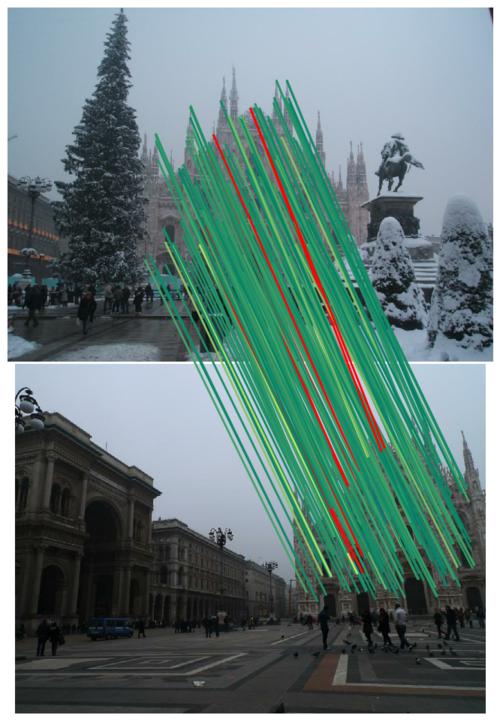
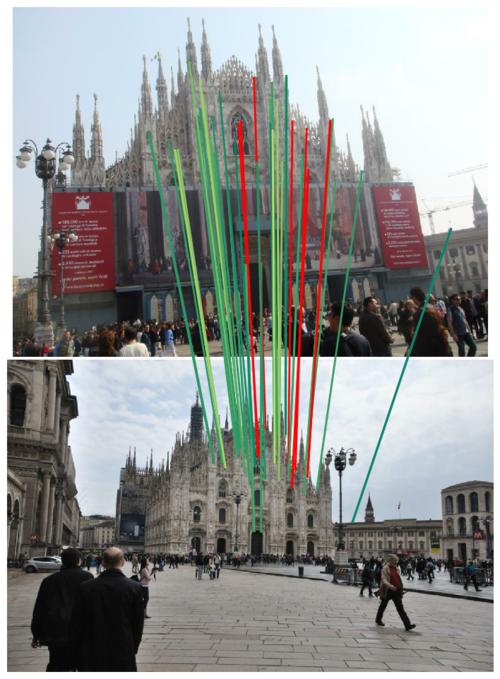
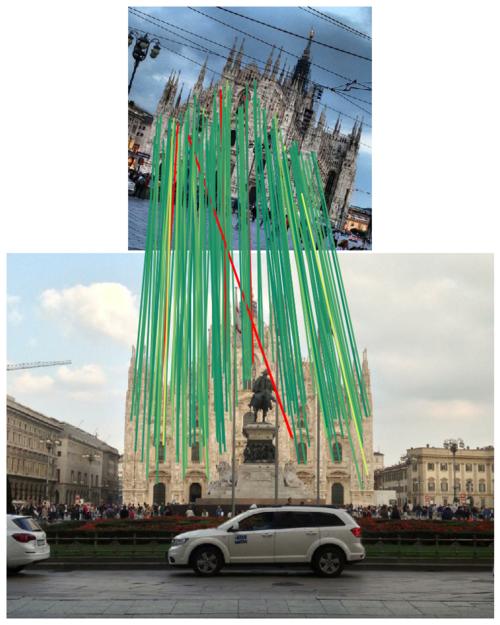
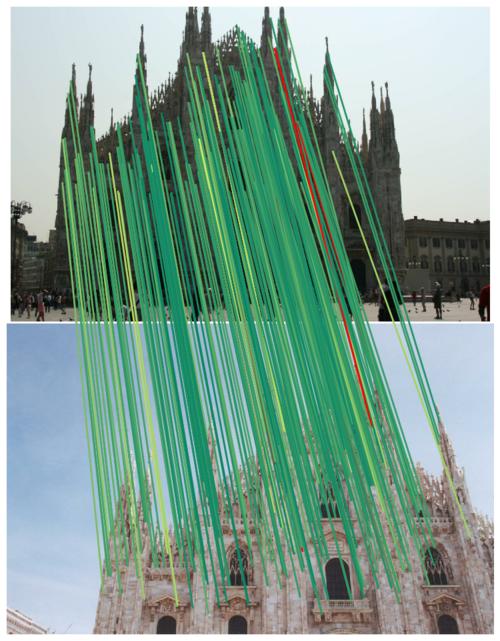
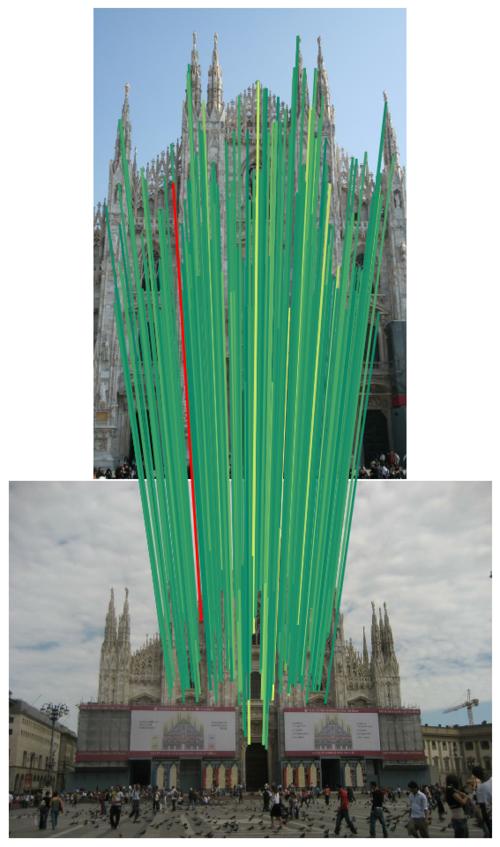
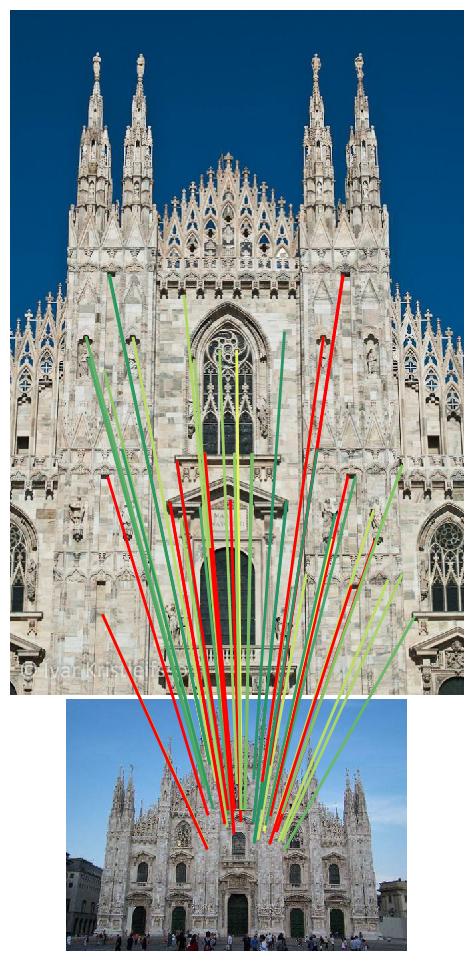
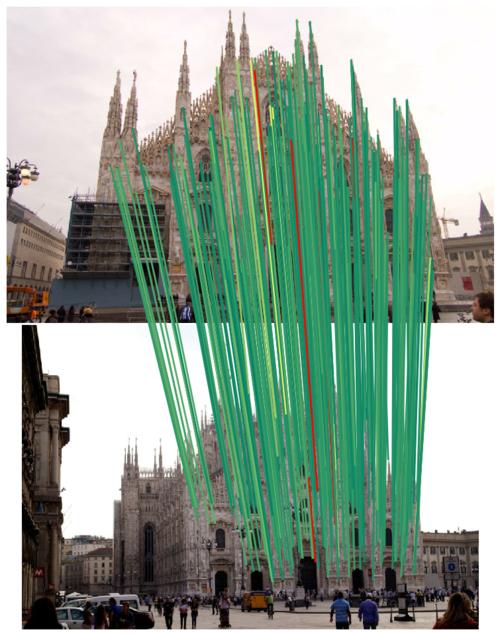
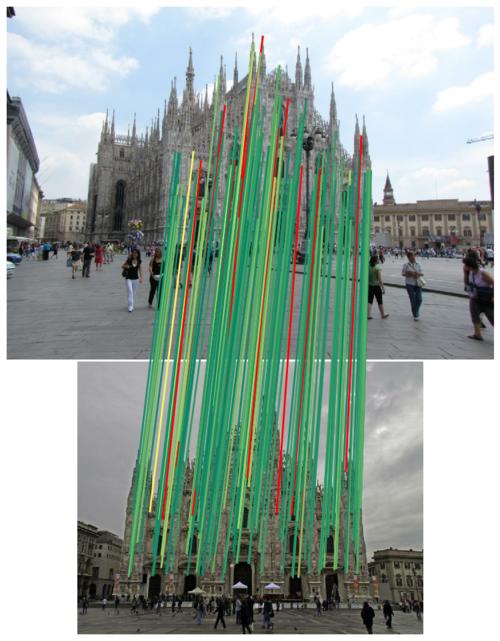
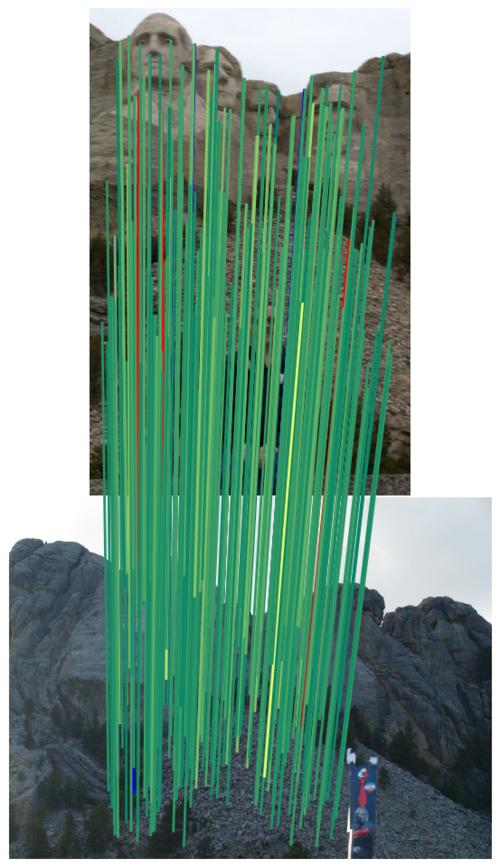
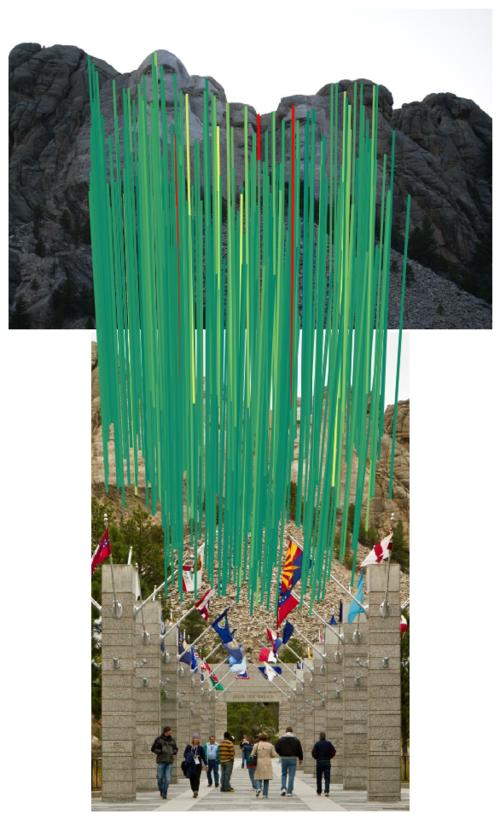
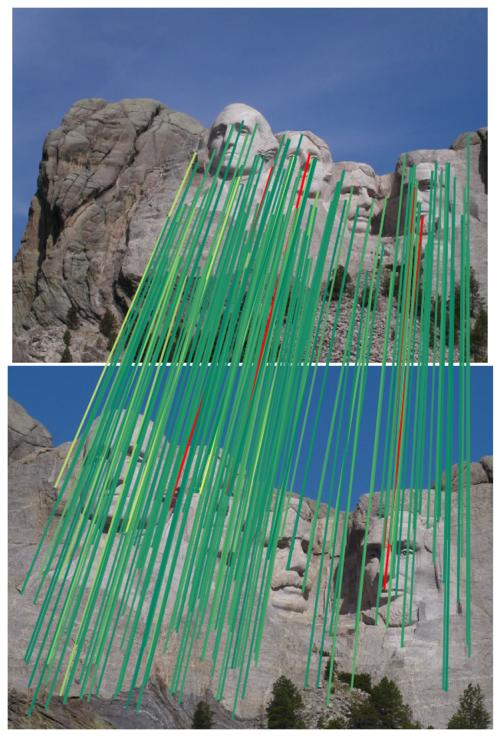
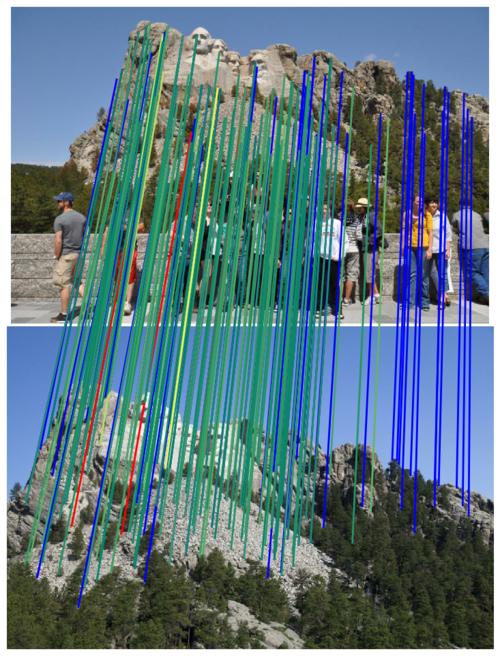
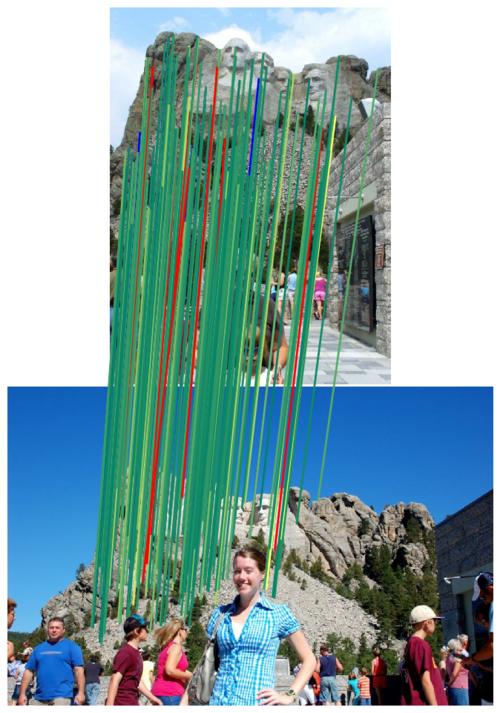
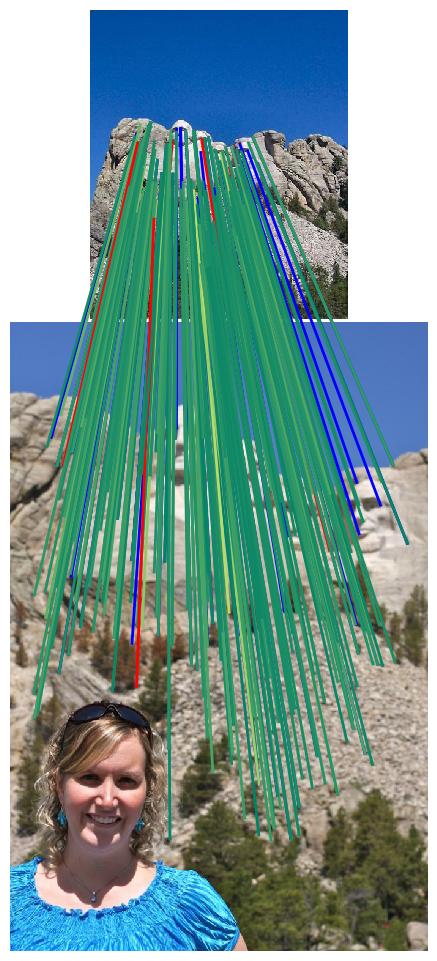
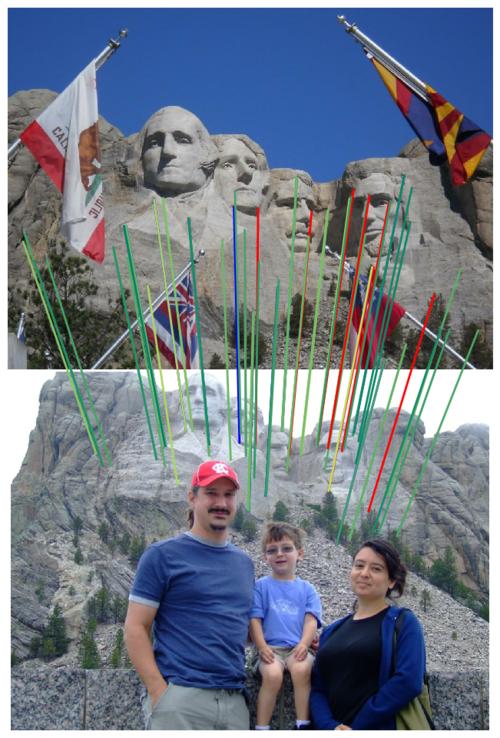
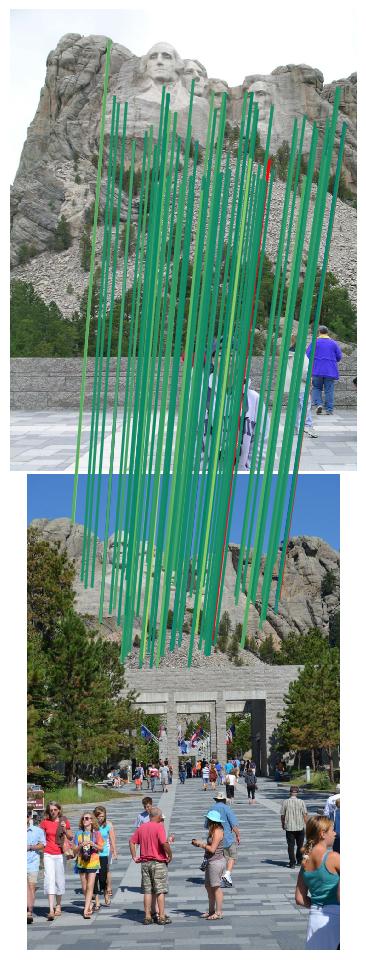
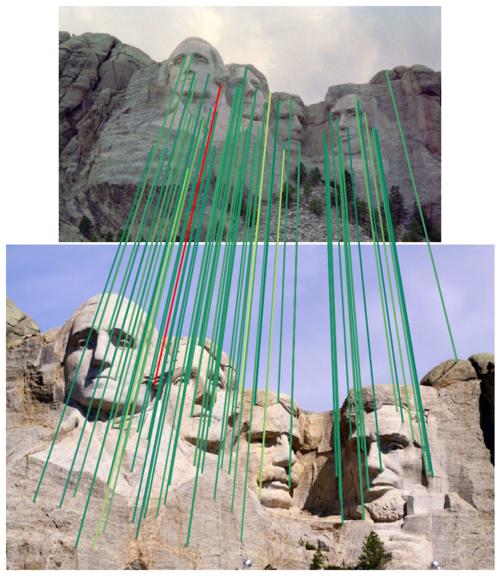
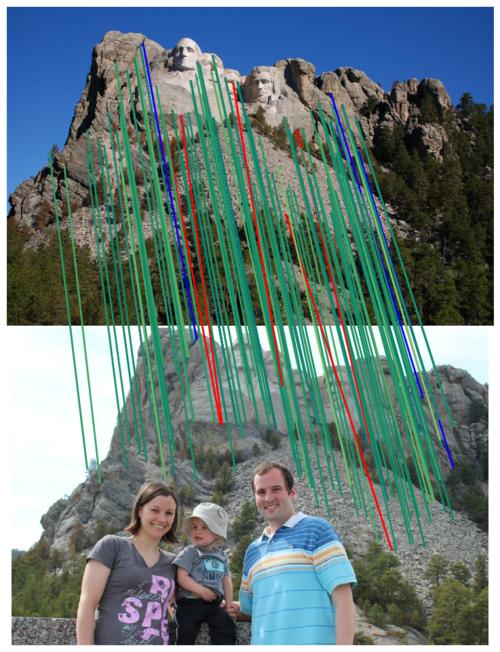
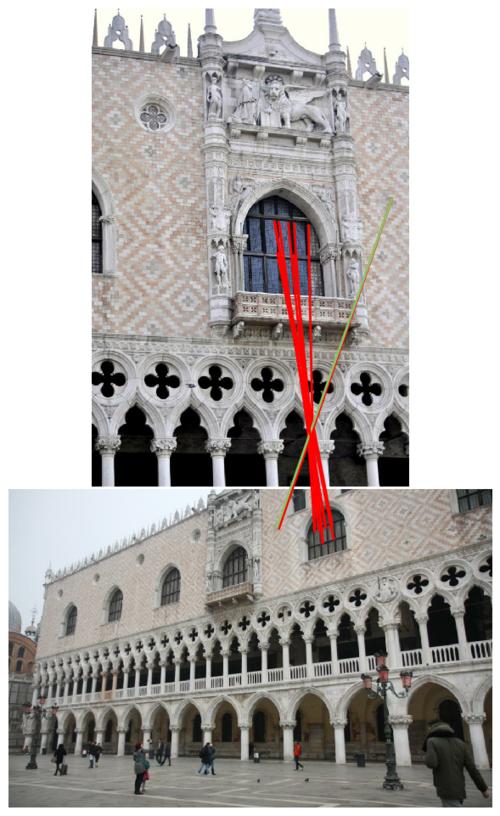
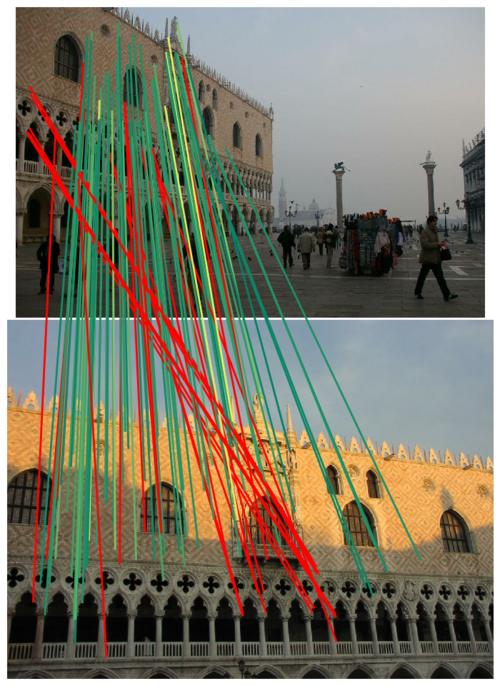
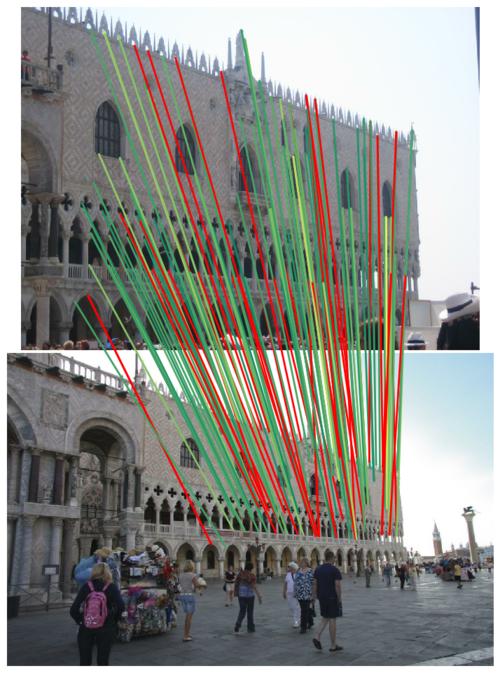
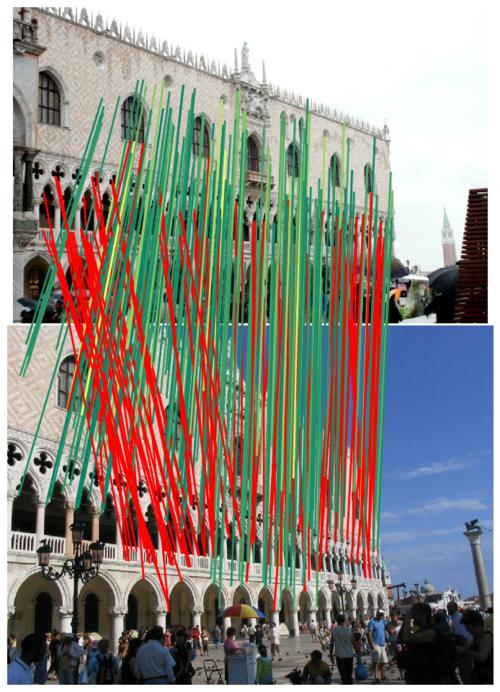
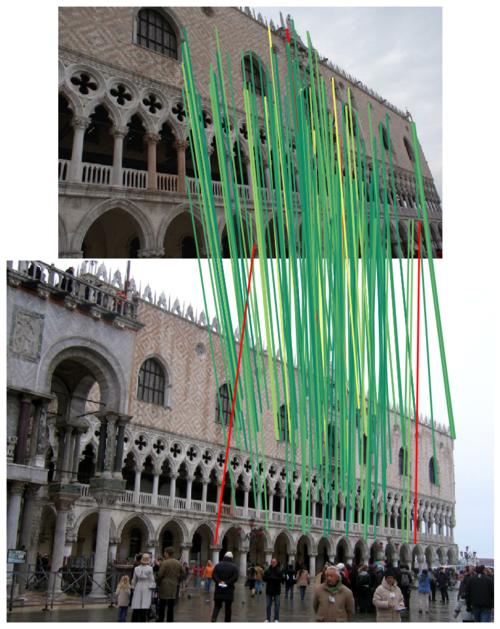
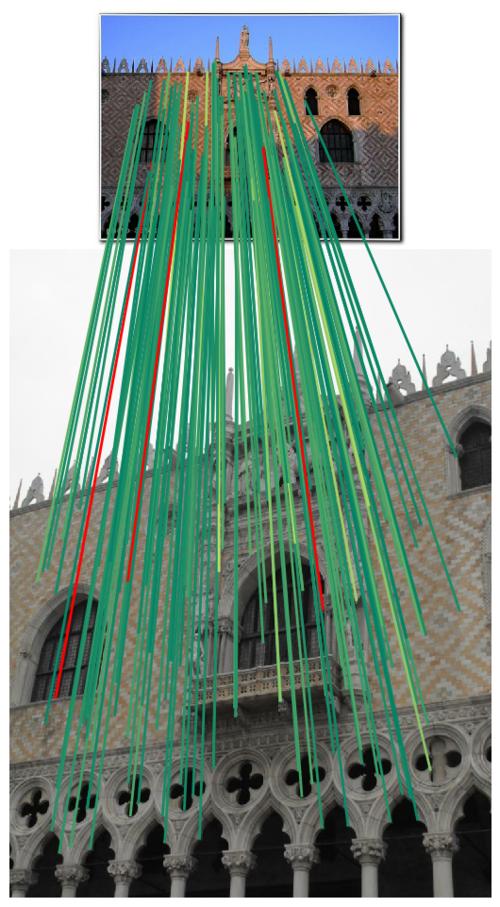
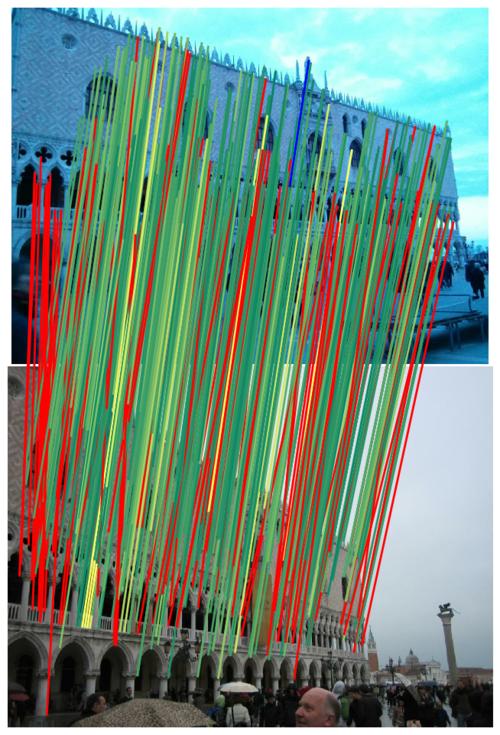
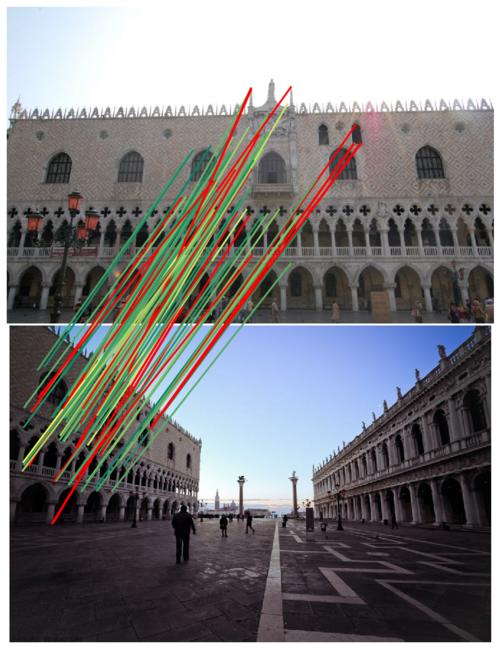
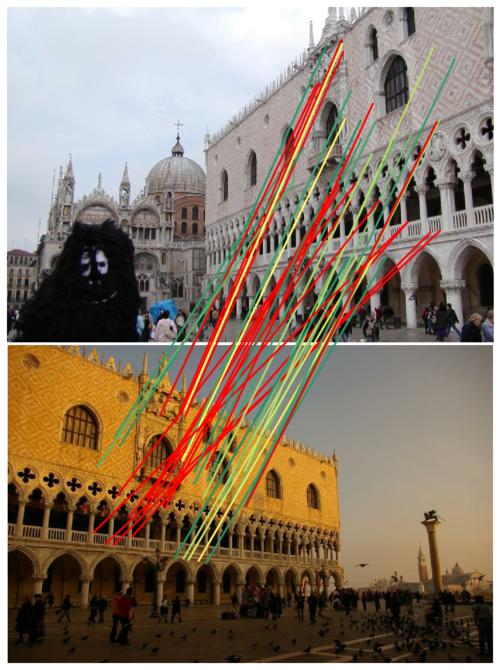
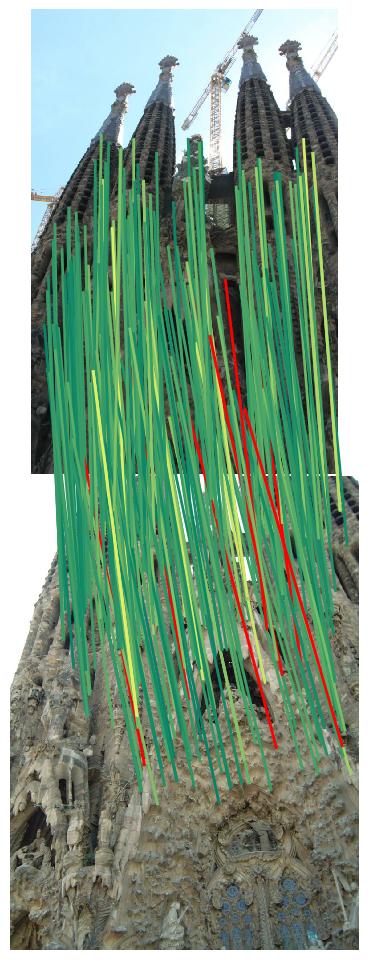
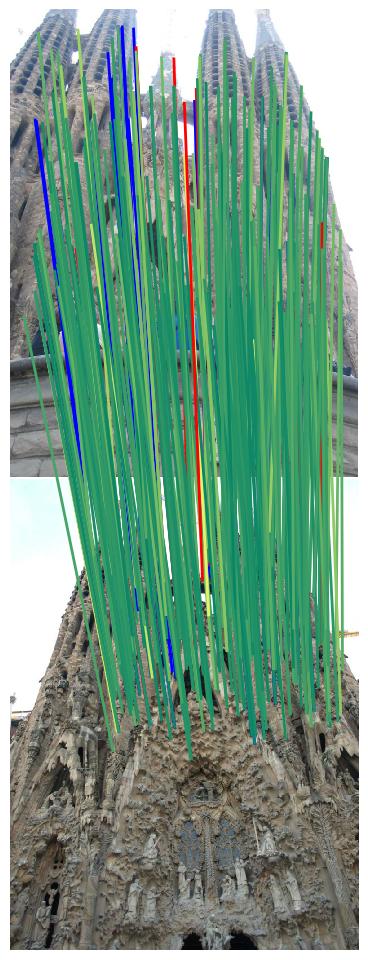
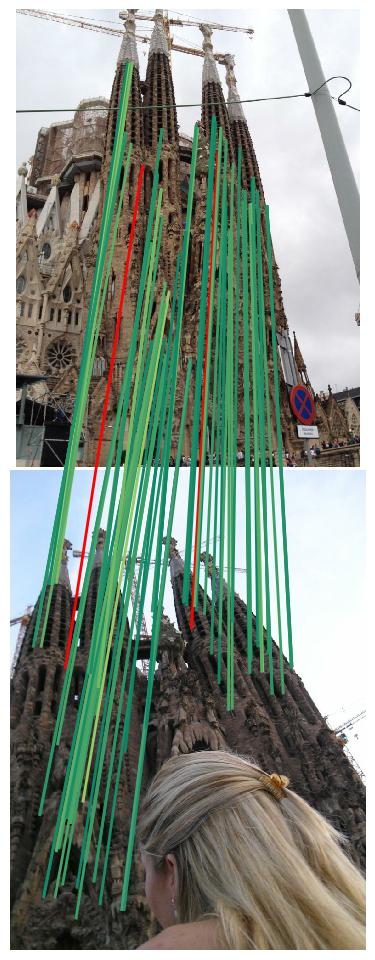
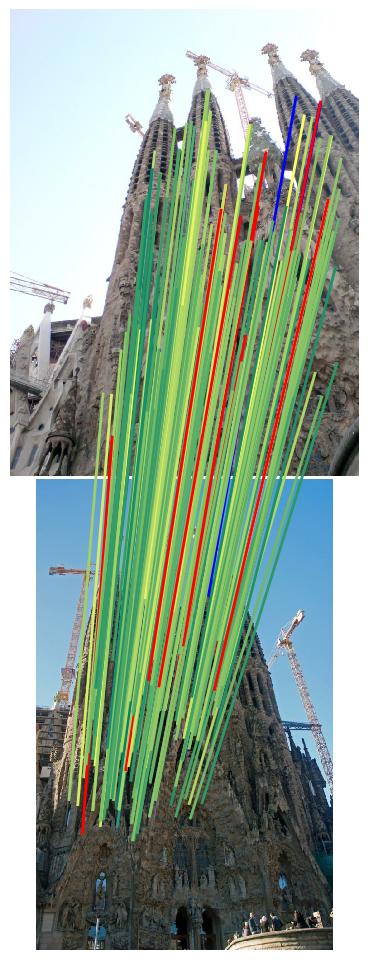
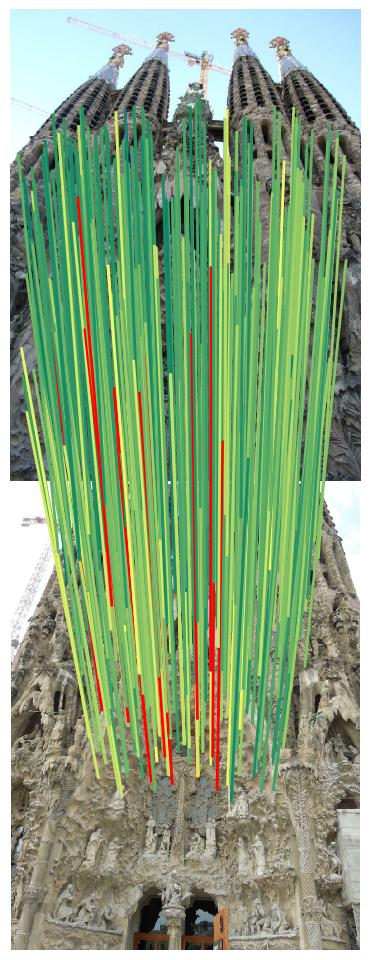
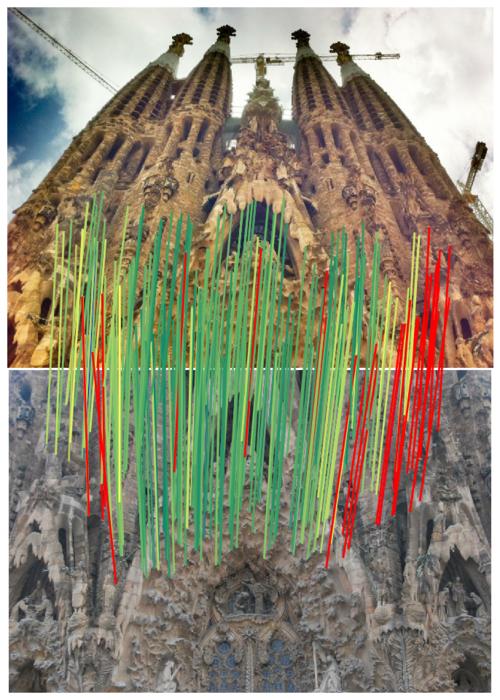
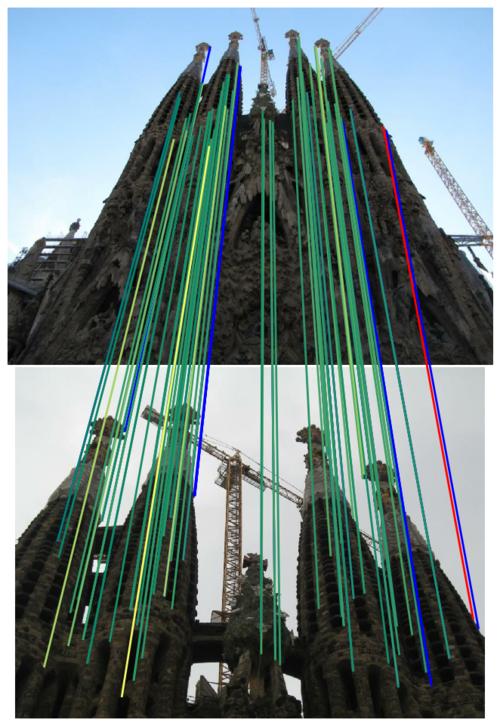
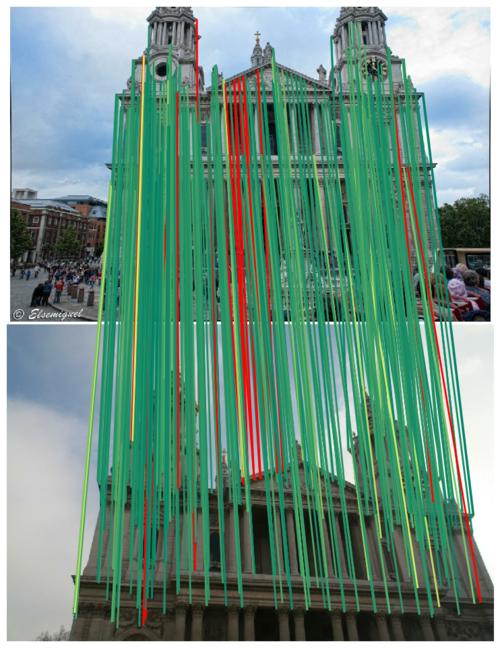
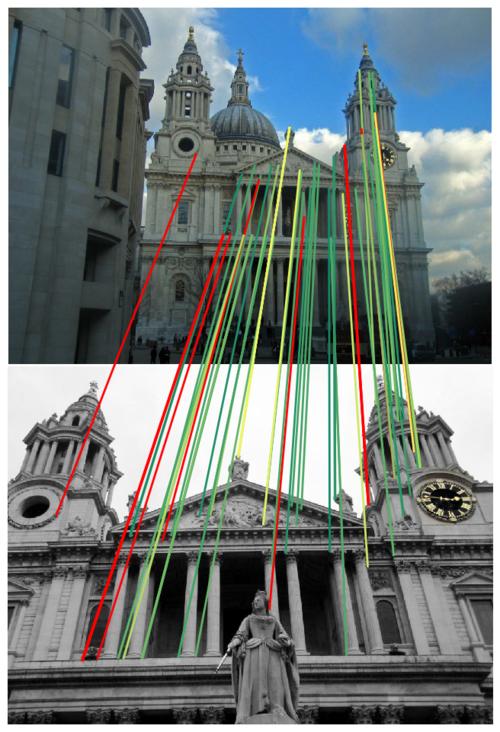
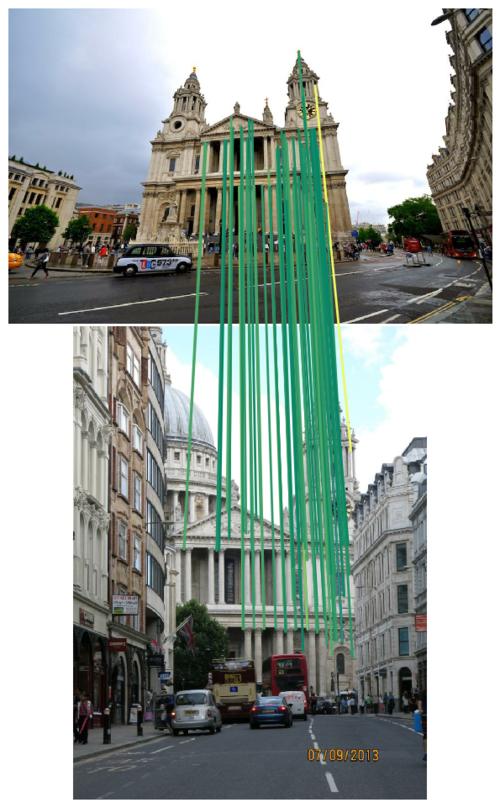
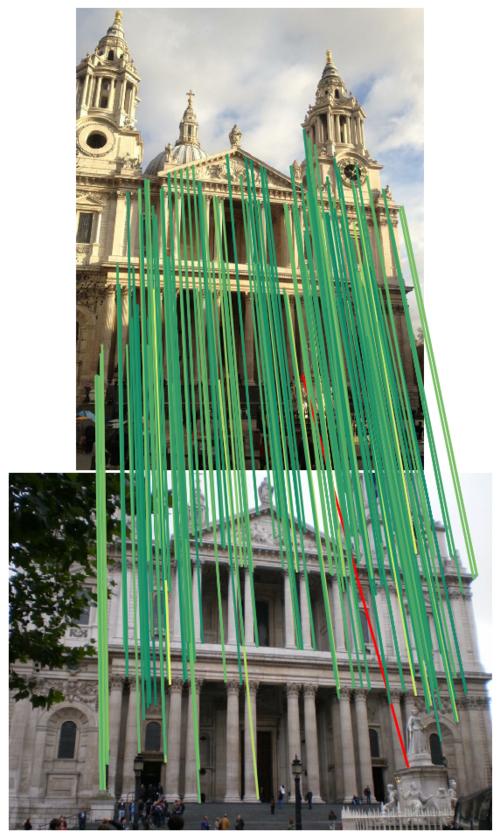
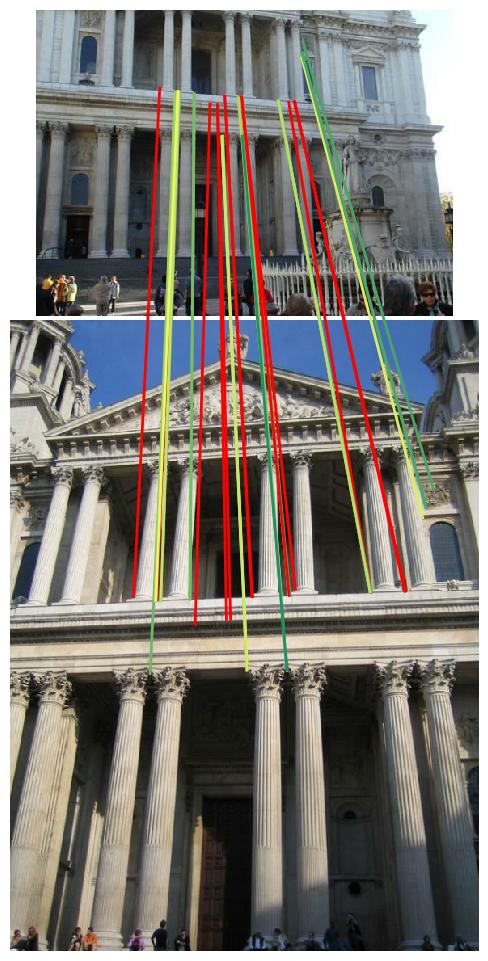
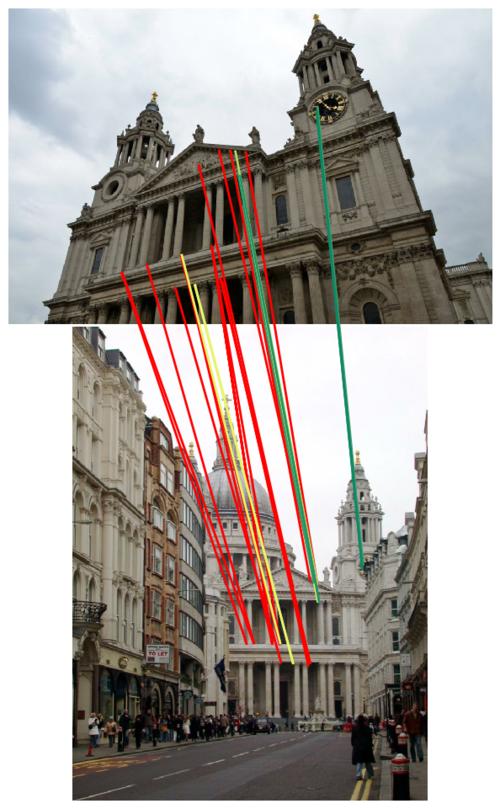
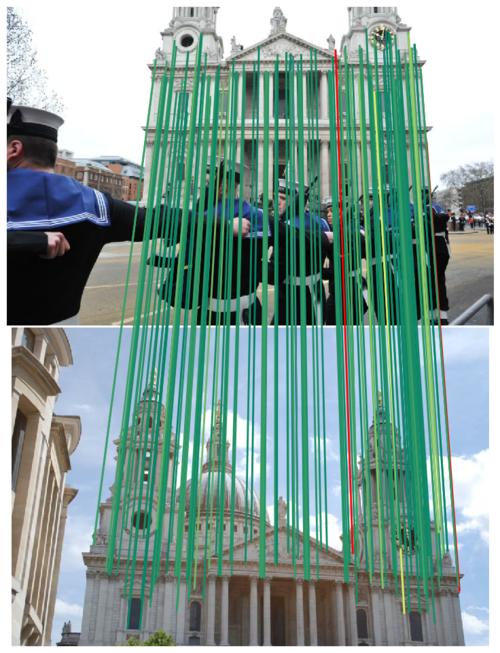
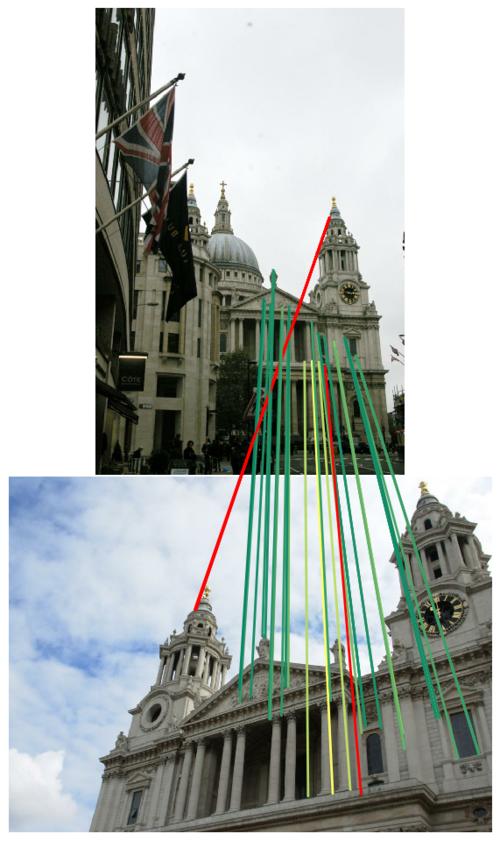
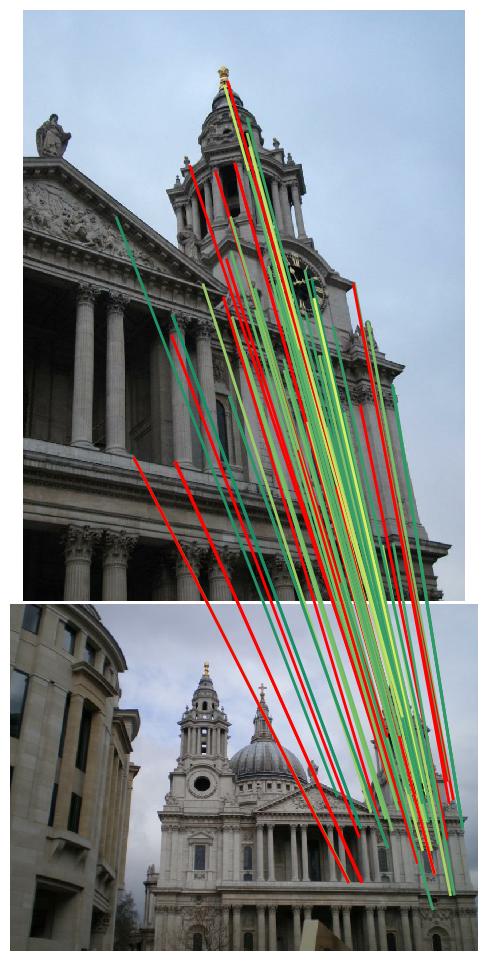
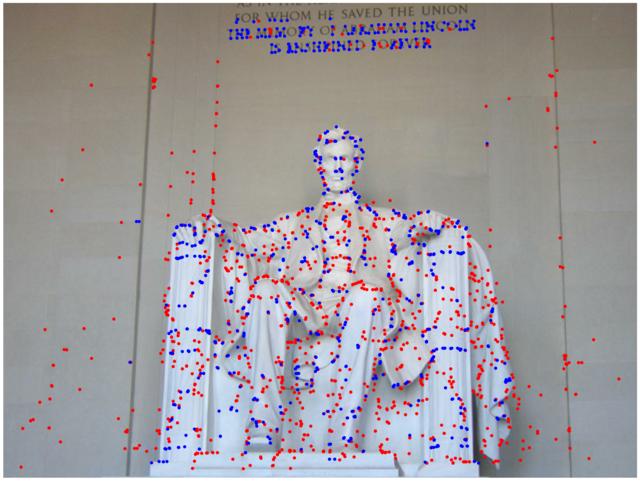
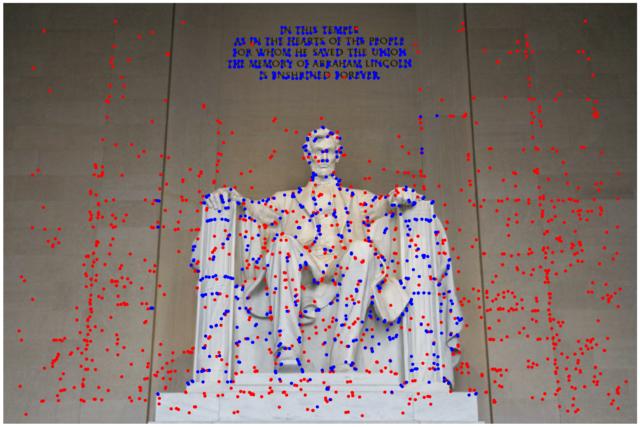
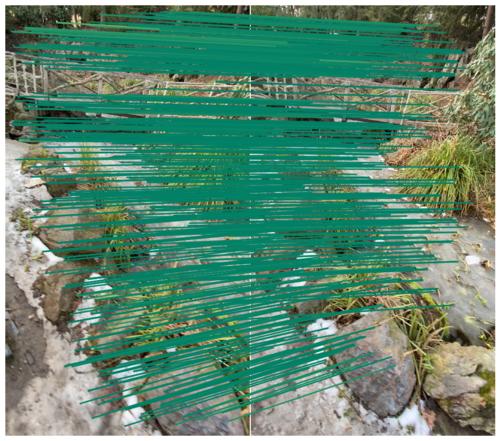
We show the inliers that survive the robust estimation loop (i.e. RANSAC), or those supplied with the submission if using custom matches, and use the depth estimates to determine whether they are correct. We draw matches above a 5-pixel error threshold in red, and those below are color-coded by their error, from 0 (green) to 5 pixels (yellow). Matches for which we do not have depth estimates are drawn in blue. Please note that the depth maps are estimates and may contain errors.
— British Museum —



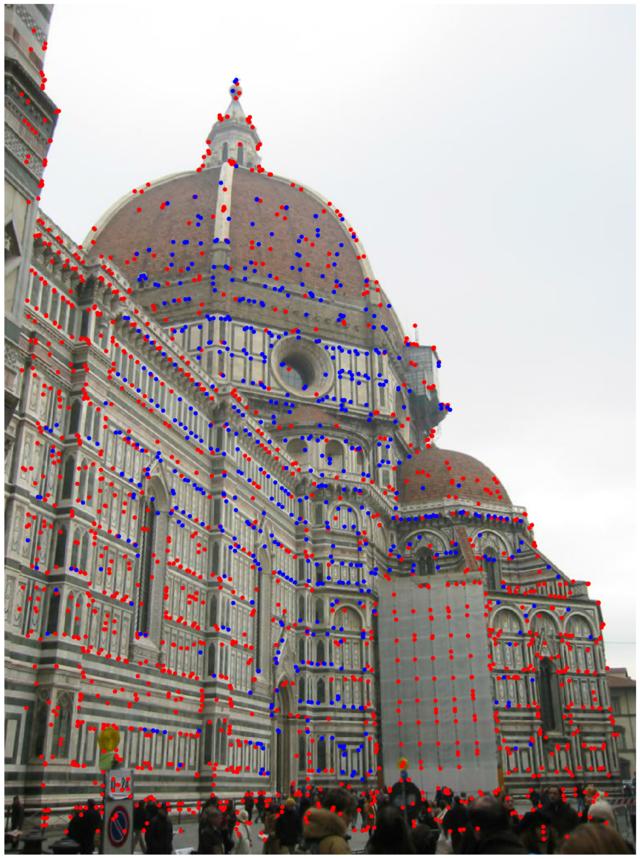
— Florence Cathedral Side —
— Lincoln Memorial Statue —
— London Bridge —



— Milan Cathedral —


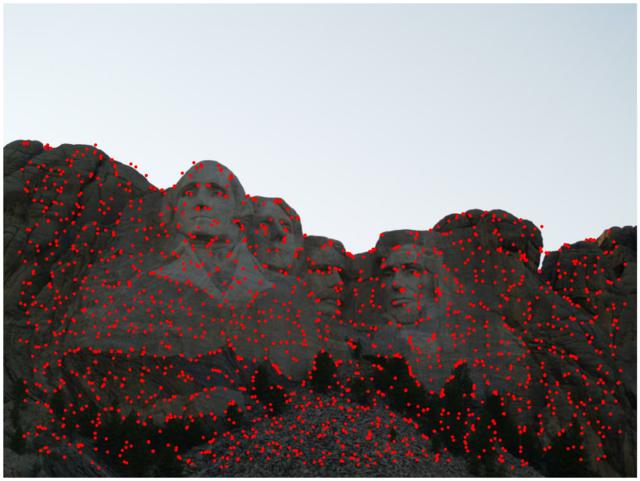
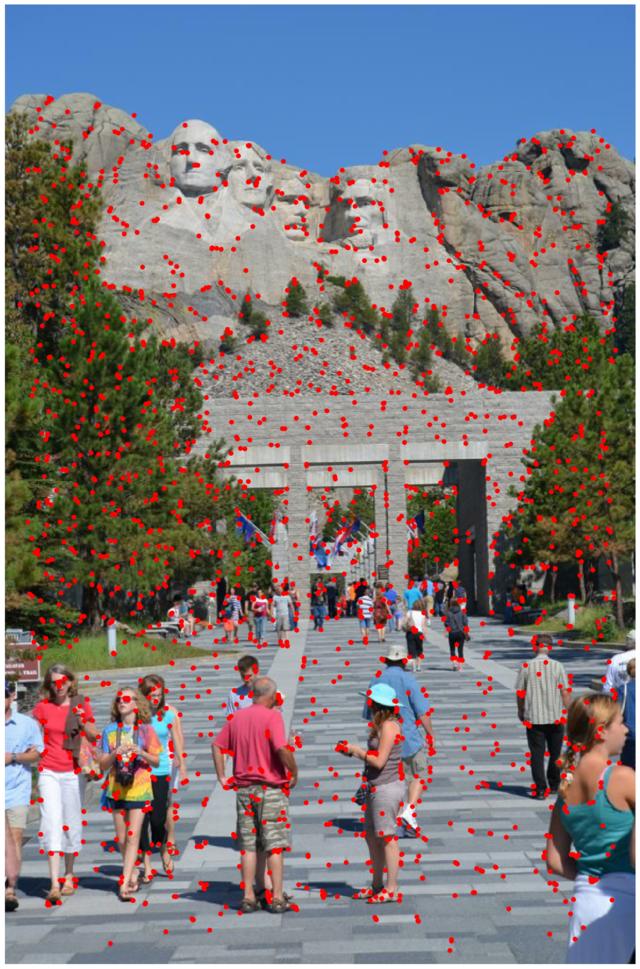
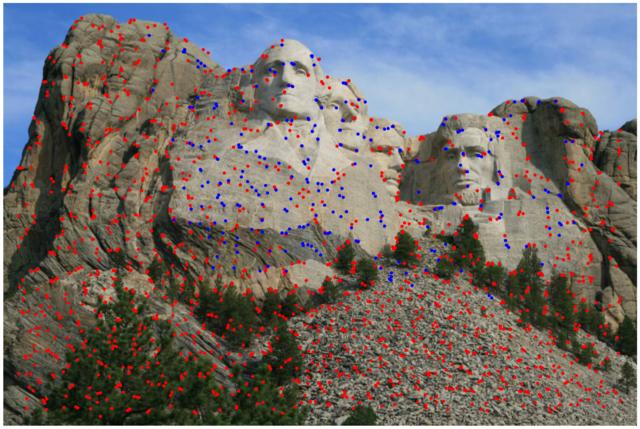
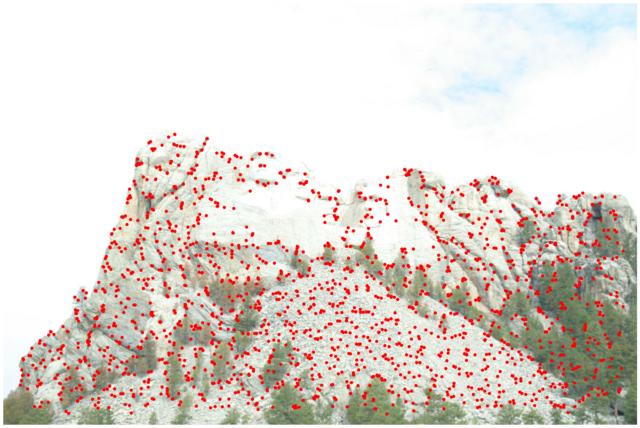
— Mount Rushmore —
— Piazza San Marco —

— Sagrada Familia —


— Saint Paul's Cathedral —

Phototourism dataset / Multiview track
mAA at 10 degrees: N/A (±0.00000 over 1 run(s) / ±0.13503 over 9 scenes)
Rank (per category): 49 (of 87)
| Scene | Features | Matches (input) |
RegistrationRatio (%) | Number of Landmarks |
Track Length | ATE | mAA(50) | mAA(100) |
| BM | 2048.0 | 300.41 | 99.53 Rank: 68/87 |
1122.90 Rank: 62/87 |
4.903 Rank: 44/87 |
0.53377 Rank: 59/87 |
0.42549 (±0.00000) Rank: 60/87 |
0.56686 (±0.00000) Rank: 61/87 |
| FCS | 2048.0 | 282.90 | 98.86 Rank: 5/87 |
1711.41 Rank: 64/87 |
4.617 Rank: 58/87 |
0.26185 Rank: 51/87 |
0.75392 (±0.00000) Rank: 16/87 |
0.82076 (±0.00000) Rank: 5/87 |
| LMS | 2025.2 | 298.19 | 99.20 Rank: 42/87 |
1244.42 Rank: 69/87 |
4.968 Rank: 68/87 |
0.29275 Rank: 37/87 |
0.81877 (±0.00000) Rank: 49/87 |
0.87917 (±0.00000) Rank: 48/87 |
| LB | 2046.5 | 277.20 | 97.99 Rank: 47/87 |
1078.15 Rank: 69/87 |
4.773 Rank: 62/87 |
0.47187 Rank: 14/87 |
0.68974 (±0.00000) Rank: 44/87 |
0.78782 (±0.00000) Rank: 45/87 |
| MC | 2047.5 | 265.03 | 99.60 Rank: 60/87 |
1289.22 Rank: 62/87 |
4.795 Rank: 54/87 |
0.36566 Rank: 40/87 |
0.53195 (±0.00000) Rank: 42/87 |
0.68102 (±0.00000) Rank: 41/87 |
| MR | 2048.0 | 276.60 | 93.47 Rank: 52/87 |
1418.06 Rank: 60/87 |
4.291 Rank: 69/87 |
0.52101 Rank: 34/87 |
0.40600 (±0.00000) Rank: 41/87 |
0.52965 (±0.00000) Rank: 41/87 |
| PSM | 2048.0 | 159.84 | 91.42 Rank: 63/87 |
1719.38 Rank: 65/87 |
3.377 Rank: 62/87 |
0.56650 Rank: 60/87 |
0.42413 (±0.00000) Rank: 59/87 |
0.51286 (±0.00000) Rank: 59/87 |
| SF | 2048.0 | 263.43 | 98.60 Rank: 48/87 |
1694.78 Rank: 70/87 |
4.438 Rank: 72/87 |
0.31281 Rank: 58/87 |
0.73574 (±0.00000) Rank: 45/87 |
0.82141 (±0.00000) Rank: 44/87 |
| SPC | 2043.3 | 232.33 | 99.60 Rank: 54/87 |
1305.31 Rank: 66/87 |
4.562 Rank: 61/87 |
0.39232 Rank: 3/87 |
0.71615 (±0.00000) Rank: 43/87 |
0.82006 (±0.00000) Rank: 43/87 |
| Avg | 2044.7 | 261.77 | 97.58 Rank: 56/87 |
1398.18 Rank: 65/87 |
4.525 Rank: 64/87 |
0.41317 Rank: 49/87 |
0.61132 (±0.00000) Rank: 49/87 |
0.71329 (±0.00000) Rank: 49/87 |
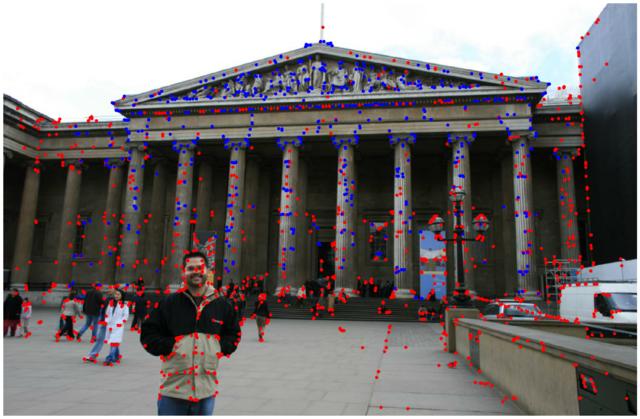
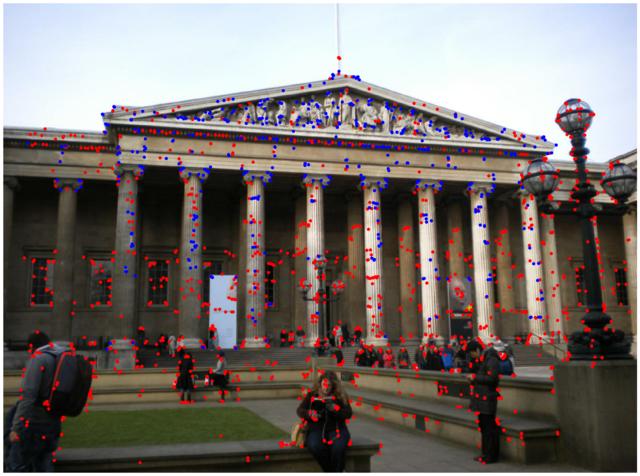
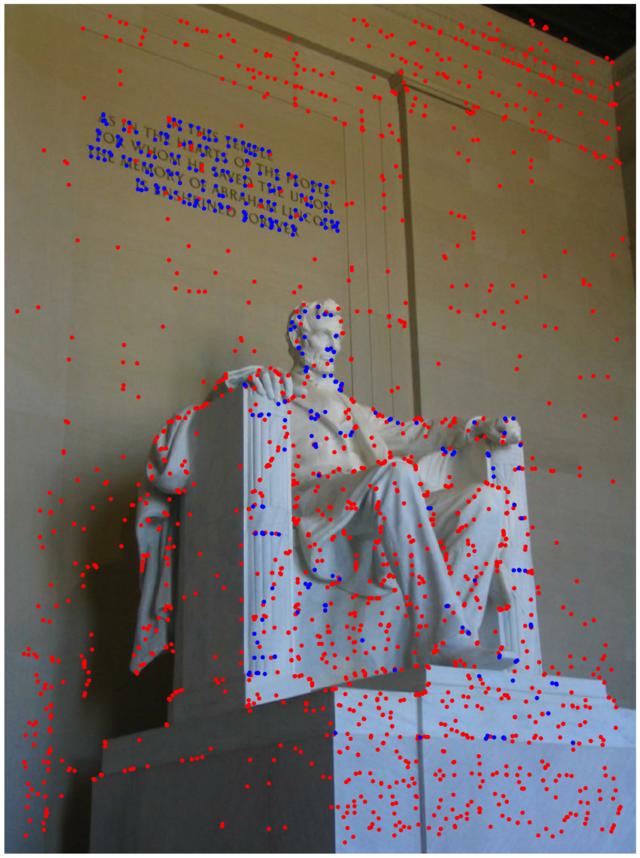
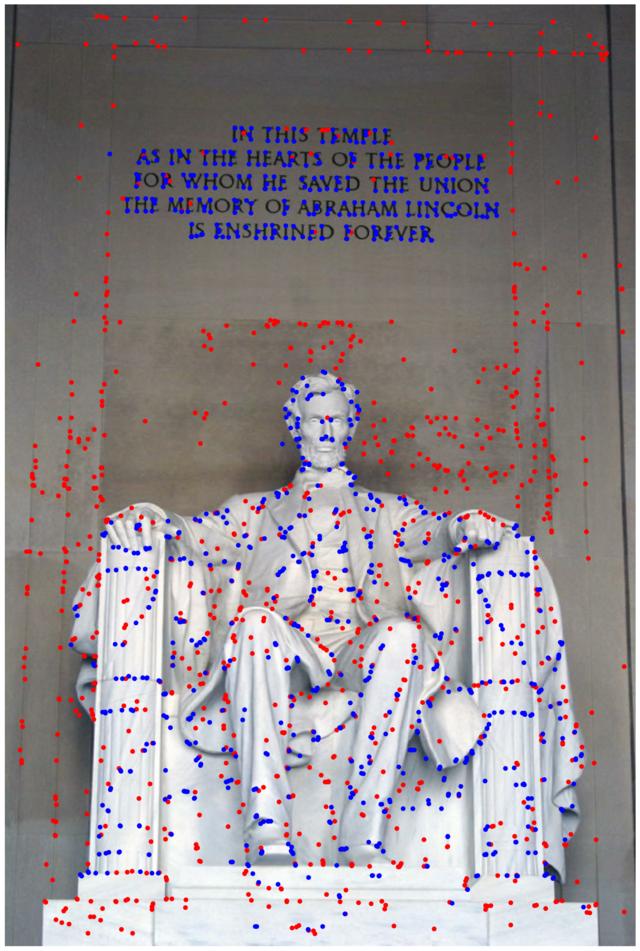
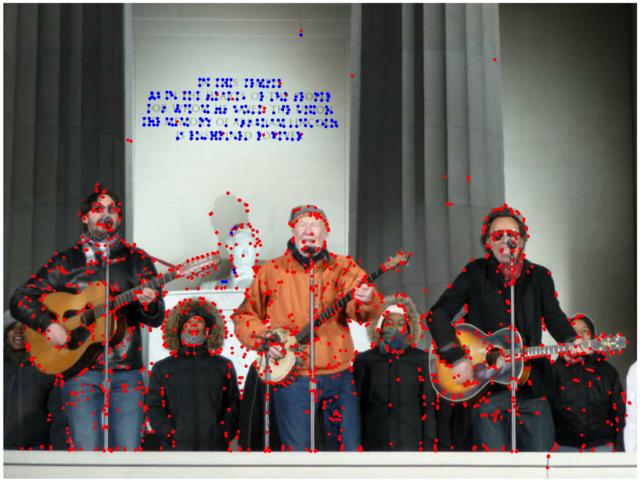
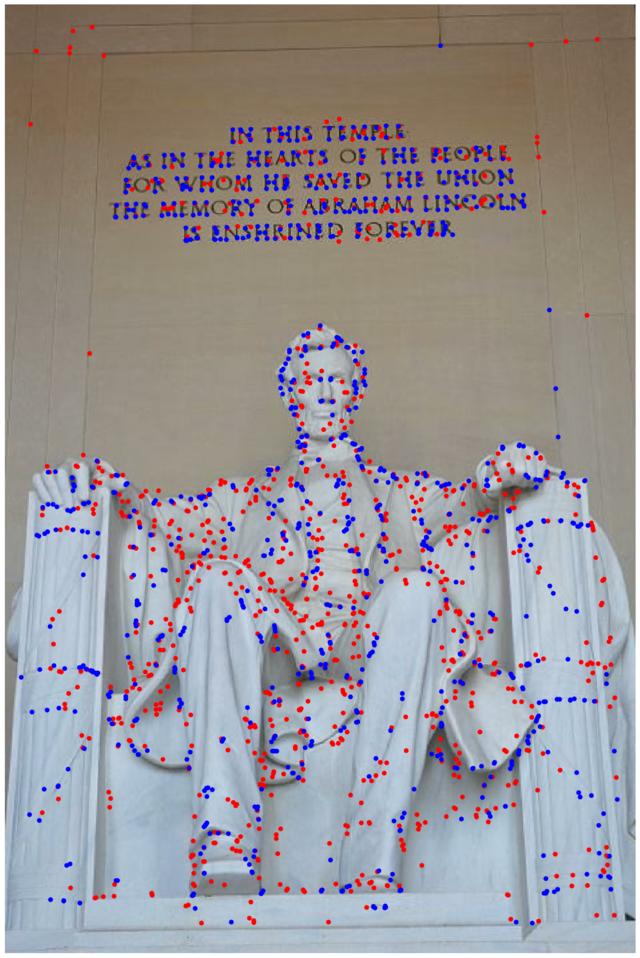
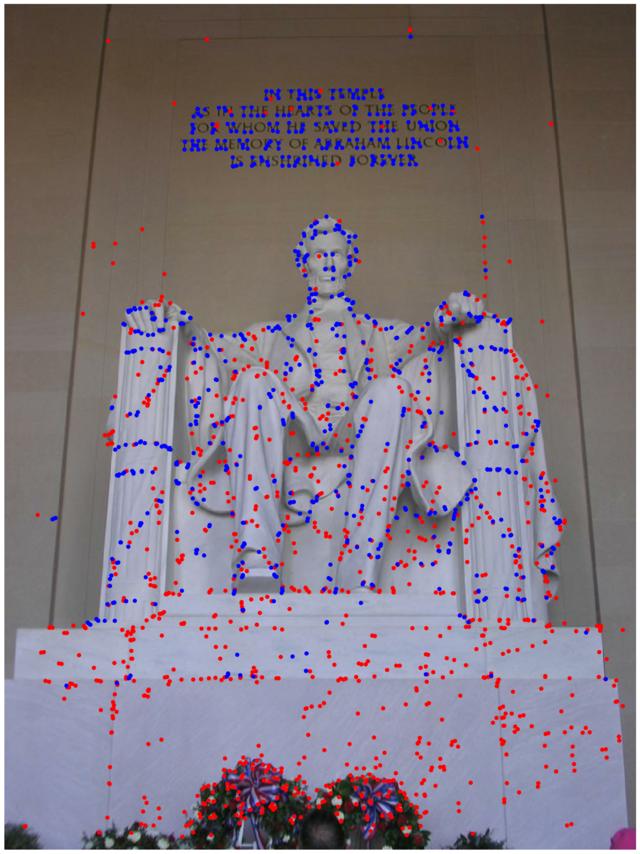
In the multi-view track we reconstruct the scene with Structure-from-Motion (Colmap) with small sets of images. We show the results for one bag of 10 images. Keypoints are drawn in blue if they are part of the model, and in red otherwise.
— British Museum —








— Florence Cathedral Side —





— Lincoln Memorial Statue —

— London Bridge —








— Milan Cathedral —






— Mount Rushmore —



— Piazza San Marco —










— Sagrada Familia —


— Saint Paul's Cathedral —










Prague Parks dataset / Stereo track
mAA at 10 degrees: 0.59184 (±0.00000 over 1 run(s) / ±0.04069 over 3 scenes)
Rank (per category): 46 (of 87)
| Scene | Features | Matches (raw) |
Matches (final) |
Rep. @ 3 px. | MS @ 3 px. | mAA(5o) | mAA(10o) |
| Lizard | 2048.0 | — | 288.8 | 0.024 Rank: 68/87 |
0.009 Rank: 44/87 |
0.44216 (±0.00000) Rank: 46/87 |
0.57184 (±0.00000) Rank: 47/87 |
| Pond | 2048.0 | — | 286.8 | 0.047 Rank: 58/87 |
0.048 Rank: 34/87 |
0.43287 (±0.00000) Rank: 50/87 |
0.55511 (±0.00000) Rank: 52/87 |
| Tree | 2048.0 | — | 195.2 | 0.029 Rank: 53/87 |
0.022 Rank: 44/87 |
0.53996 (±0.00000) Rank: 47/87 |
0.64857 (±0.00000) Rank: 48/87 |
| Avg | 2048.0 | — | 256.9 | 0.034 Rank: 68/87 |
0.026 Rank: 51/87 |
0.47166 (±0.00000) Rank: 45/87 |
0.59184 (±0.00000) Rank: 46/87 |
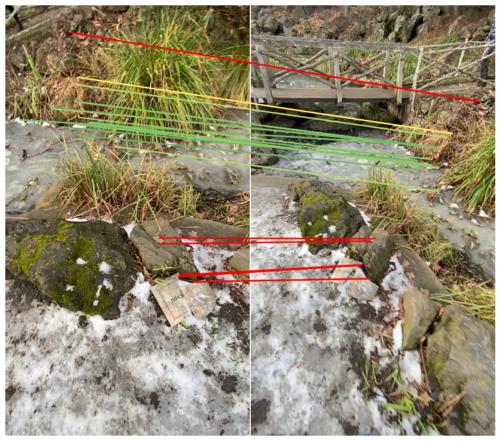
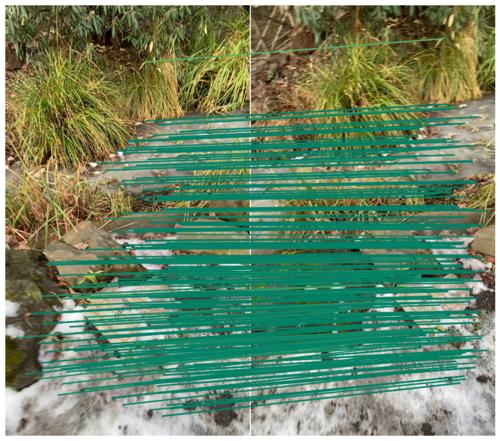
We show the inliers that survive the robust estimation loop (i.e. RANSAC), or those supplied with the submission if using custom matches, and use the depth estimates to determine whether they are correct. We draw matches above a 5-pixel error threshold in red, and those below are color-coded by their error, from 0 (green) to 5 pixels (yellow). Matches for which we do not have depth estimates are drawn in blue. Please note that the depth maps are estimates and may contain errors.
— Lizard —


— Pond —



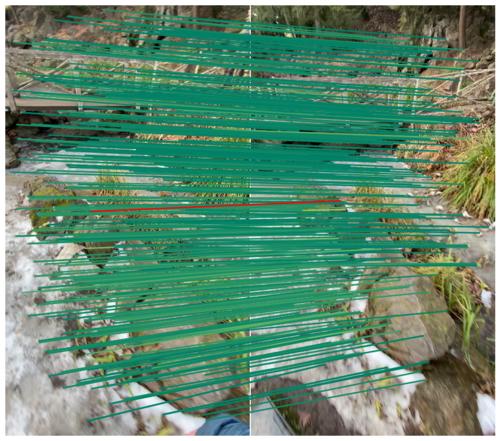
— Tree —







Prague Parks dataset / Multiview track
mAA at 10 degrees: N/A (±0.00000 over 1 run(s) / ±0.15323 over 3 scenes)
Rank (per category): 47 (of 87)
| Scene | Features | Matches (input) |
RegistrationRatio (%) | Number of Landmarks |
Track Length | ATE | mAA(50) | mAA(100) |
| Lizard | 2048.0 | 342.74 | 85.30 Rank: 19/87 |
744.93 Rank: 52/87 |
3.385 Rank: 33/87 |
14.19274 Rank: 38/87 |
0.55533 (±0.00000) Rank: 47/87 |
0.64919 (±0.00000) Rank: 43/87 |
| Pond | 2048.0 | 434.49 | 70.83 Rank: 8/87 |
744.41 Rank: 57/87 |
3.051 Rank: 13/87 |
0.44655 Rank: 66/87 |
0.24862 (±0.00000) Rank: 54/87 |
0.27386 (±0.00000) Rank: 61/87 |
| Tree | 2048.0 | 222.14 | 70.19 Rank: 49/87 |
387.95 Rank: 61/87 |
2.940 Rank: 52/87 |
5.85828 Rank: 19/87 |
0.42491 (±0.00000) Rank: 40/87 |
0.46260 (±0.00000) Rank: 39/87 |
| Avg | 2048.0 | 333.12 | 75.44 Rank: 14/87 |
625.77 Rank: 58/87 |
3.125 Rank: 21/87 |
6.83252 Rank: 21/87 |
0.40962 (±0.00000) Rank: 48/87 |
0.46188 (±0.00000) Rank: 47/87 |
In the multi-view track we reconstruct the scene with Structure-from-Motion (Colmap) with small sets of images. We show the results for one bag of 10 images. Keypoints are drawn in blue if they are part of the model, and in red otherwise.
— Lizard —

— Pond —





— Tree —


Google Urban dataset / Stereo track
mAA at 10 degrees: 0.29635 (±0.00000 over 1 run(s) / ±0.12235 over 17 scenes)
Rank (per category): 44 (of 87)
| Scene | Features | Matches (raw) |
Matches (final) |
mAA(5o) | mAA(10o) |
| Amsterdam (AMS) | 2048.0 | — | 160.2 | 0.18125 (±0.00000) Rank: 37/87 |
0.30893 (±0.00000) Rank: 37/87 |
| Bangkok (BGK) | 2026.9 | — | 209.7 | 0.05658 (±0.00000) Rank: 30/87 |
0.14864 (±0.00000) Rank: 39/87 |
| Barcelona (BCN) | 2048.0 | — | 116.6 | 0.09451 (±0.00000) Rank: 39/87 |
0.16300 (±0.00000) Rank: 41/87 |
| Buenos Aires (BAR) | 2048.0 | — | 163.4 | 0.16438 (±0.00000) Rank: 37/87 |
0.27580 (±0.00000) Rank: 44/87 |
| Cambridge (CAM) | 2044.9 | — | 167.4 | 0.22397 (±0.00000) Rank: 37/87 |
0.33493 (±0.00000) Rank: 45/87 |
| Cannes (CAN) | 2048.0 | — | 196.6 | 0.35484 (±0.00000) Rank: 38/87 |
0.44240 (±0.00000) Rank: 40/87 |
| Chicago (CHI) | 2042.0 | — | 99.4 | 0.11516 (±0.00000) Rank: 39/87 |
0.17999 (±0.00000) Rank: 41/87 |
| Helsinki (HEL) | 2043.3 | — | 307.6 | 0.34845 (±0.00000) Rank: 32/87 |
0.56418 (±0.00000) Rank: 31/87 |
| Madrid (MAD) | 2046.3 | — | 102.8 | 0.05410 (±0.00000) Rank: 44/87 |
0.13343 (±0.00000) Rank: 45/87 |
| Mountain View (MTV) | 2047.9 | — | 105.2 | 0.15469 (±0.00000) Rank: 40/87 |
0.25449 (±0.00000) Rank: 41/87 |
| New Orleans (NOR) | 2038.9 | — | 128.3 | 0.21420 (±0.00000) Rank: 40/87 |
0.29024 (±0.00000) Rank: 41/87 |
| San Francisco (SF) | 2041.1 | — | 179.6 | 0.14121 (±0.00000) Rank: 42/87 |
0.26299 (±0.00000) Rank: 43/87 |
| Singapore (SG) | 2033.1 | — | 193.2 | 0.19620 (±0.00000) Rank: 44/87 |
0.27595 (±0.00000) Rank: 45/87 |
| Sydney (SYD) | 2019.0 | — | 176.6 | 0.17293 (±0.00000) Rank: 47/87 |
0.28821 (±0.00000) Rank: 46/87 |
| Tokyo (TOK) | 2039.4 | — | 228.6 | 0.42941 (±0.00000) Rank: 44/87 |
0.56765 (±0.00000) Rank: 44/87 |
| Toronto (TOR) | 2041.5 | — | 85.0 | 0.13600 (±0.00000) Rank: 42/87 |
0.24480 (±0.00000) Rank: 44/87 |
| Zurich (ZRH) | 2043.6 | — | 179.6 | 0.22268 (±0.00000) Rank: 40/87 |
0.30241 (±0.00000) Rank: 42/87 |
| Average (Avg) | 2041.2 | — | 164.7 | 0.19180 (±0.00000) Rank: 43/87 |
0.29635 (±0.00000) Rank: 44/87 |
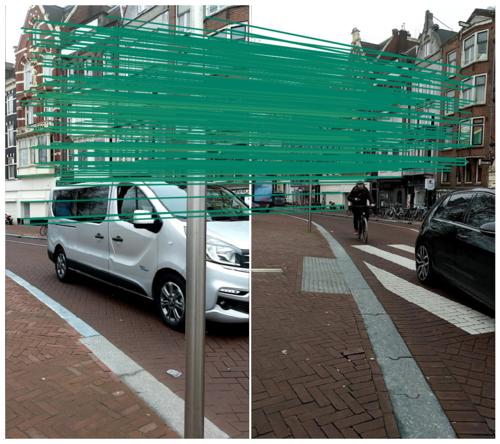
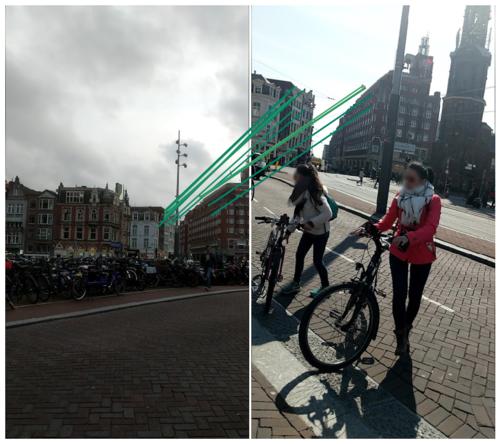
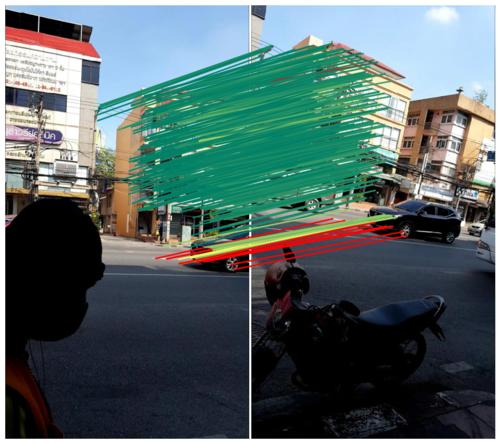
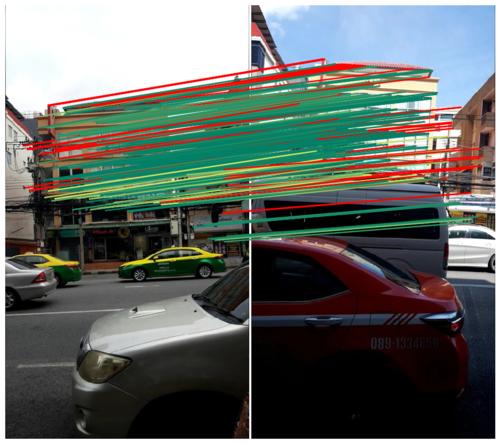
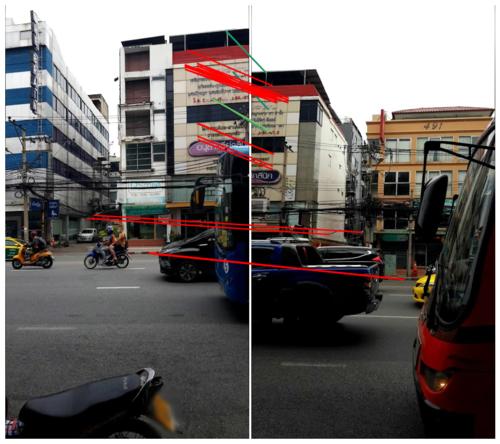
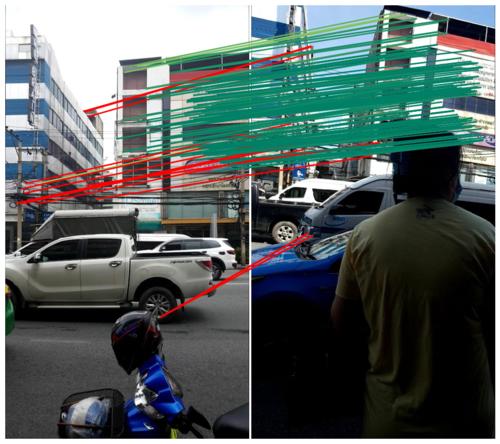
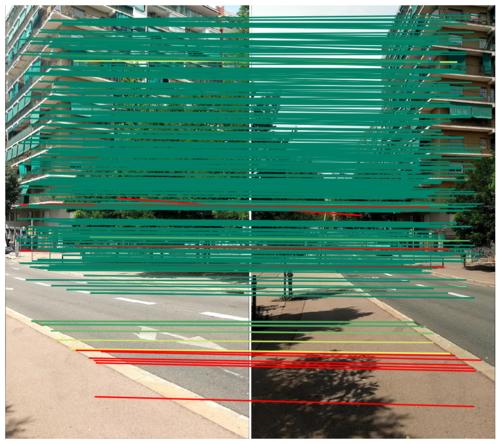
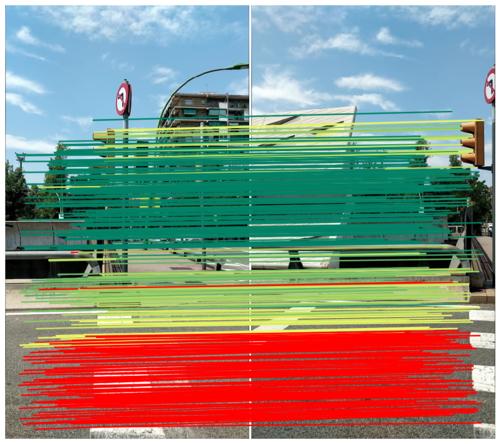
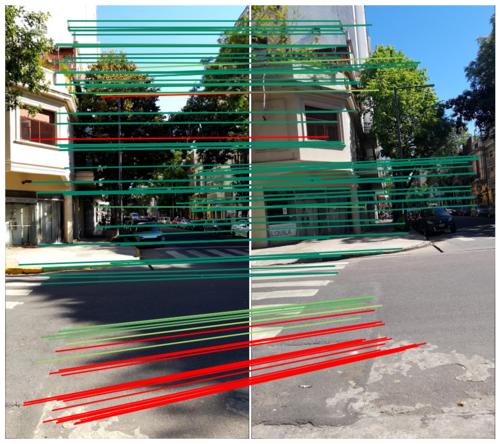
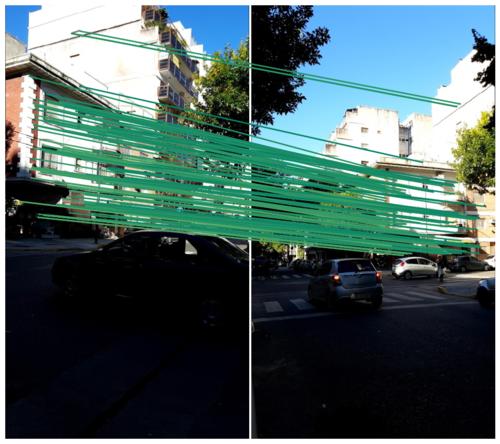
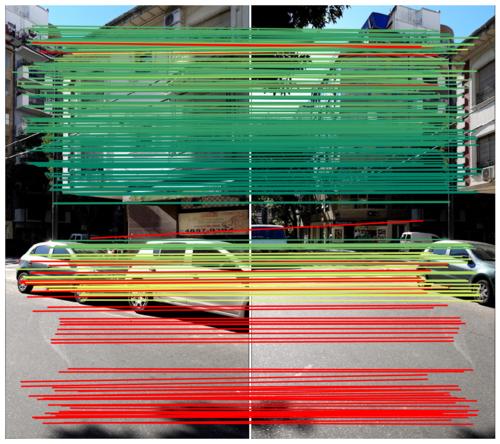
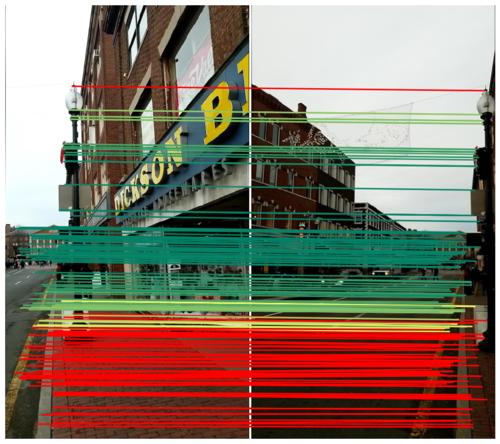
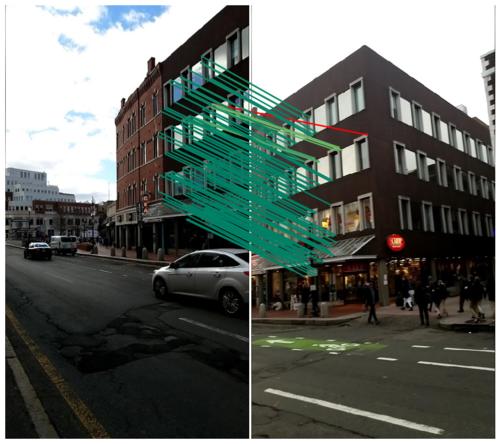
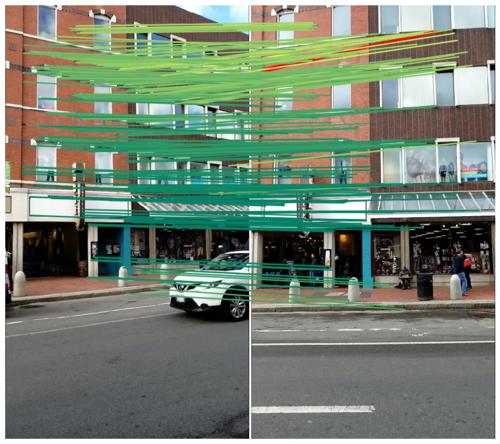
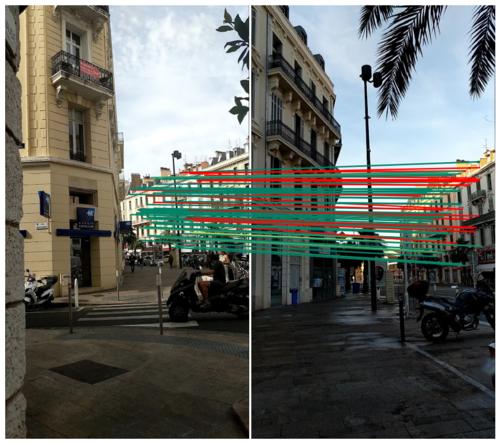
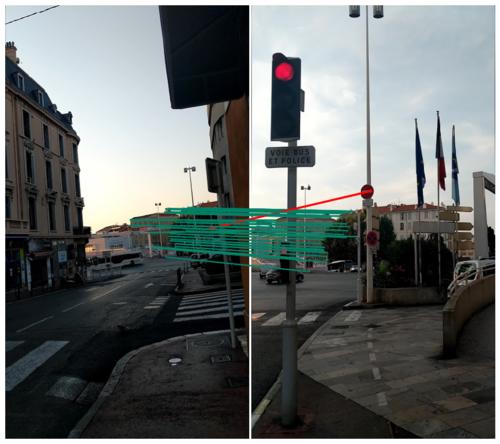
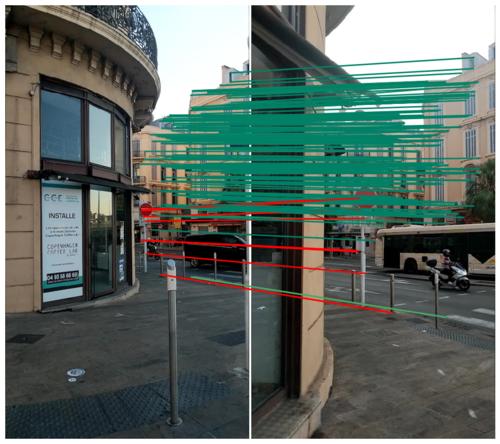
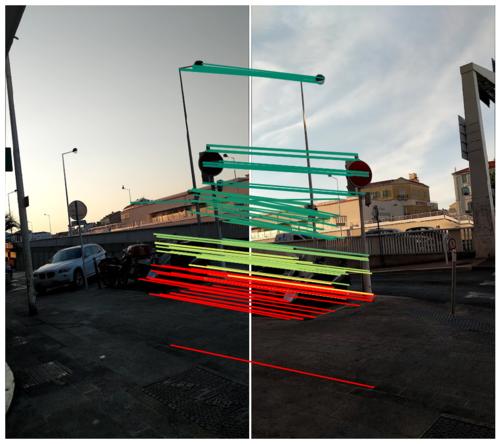
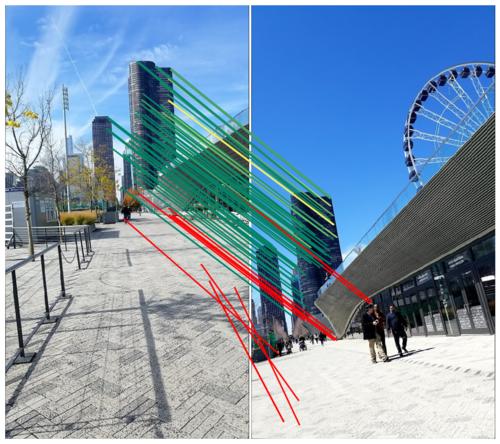
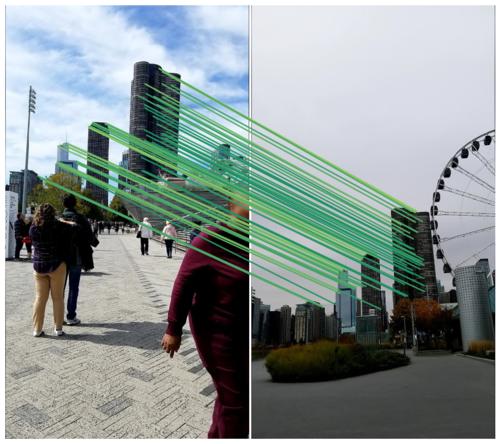
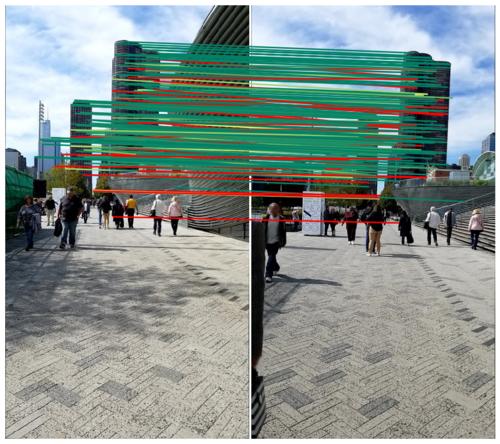
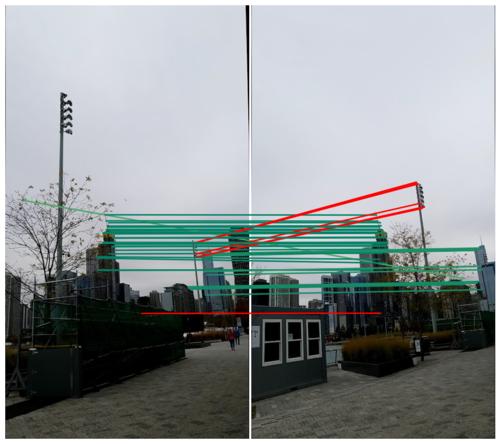
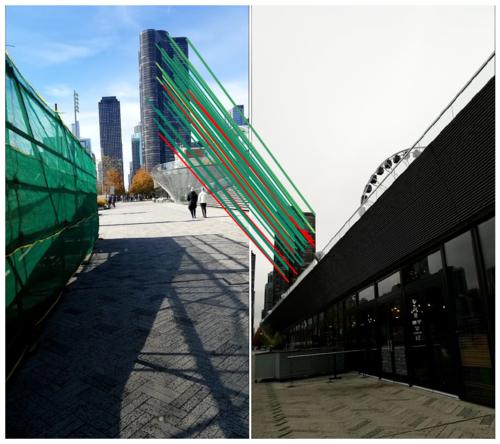
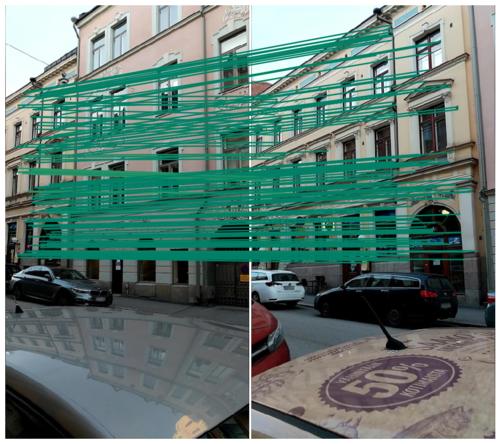
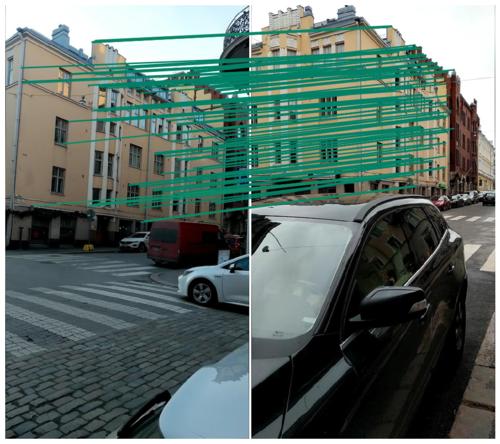
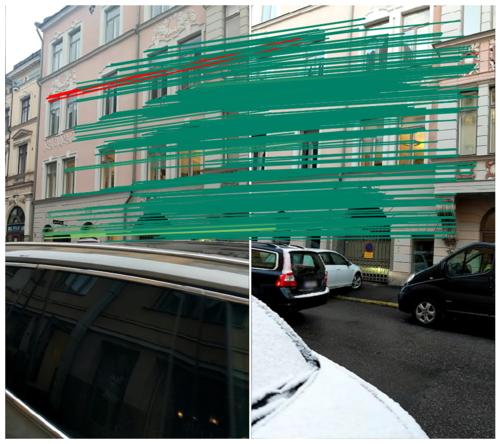
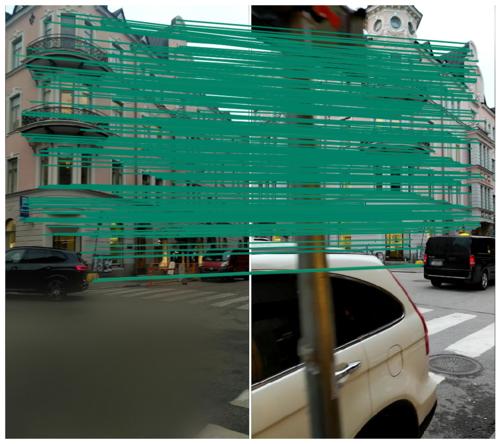
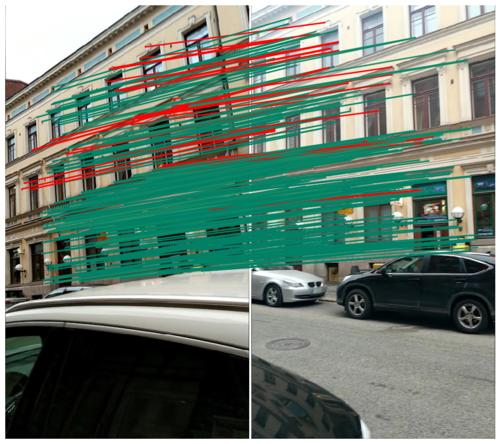
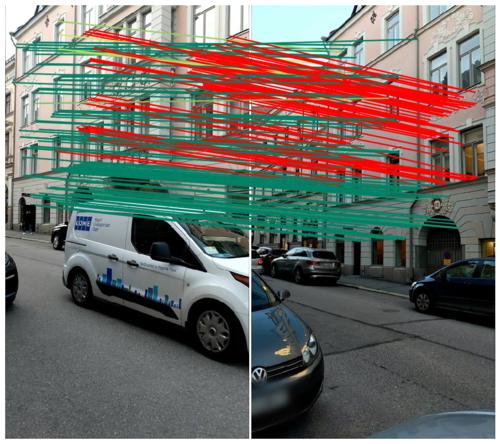
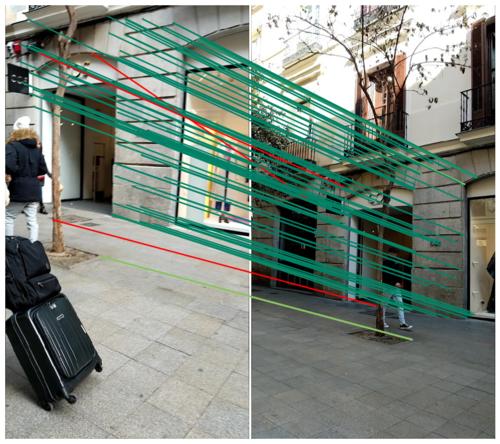
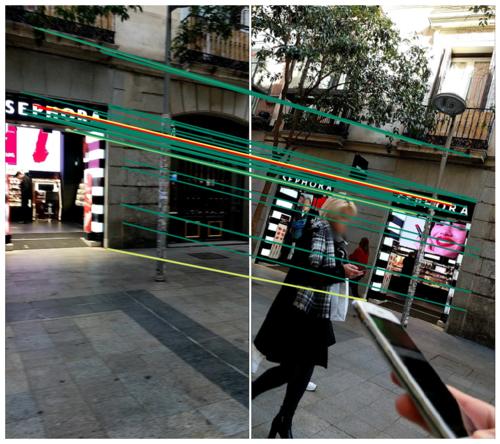
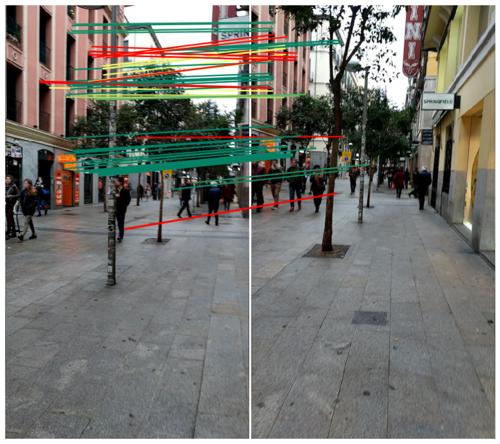
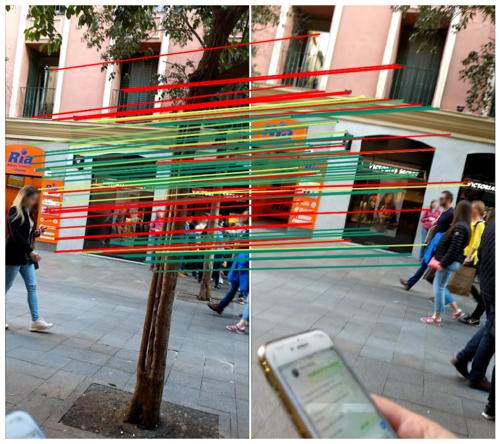
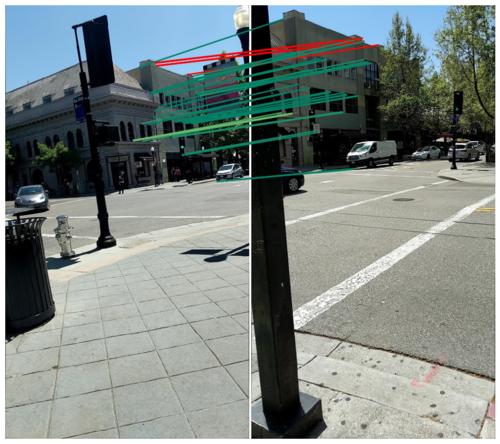
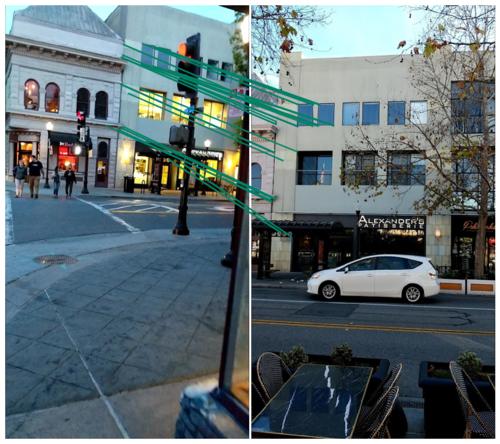
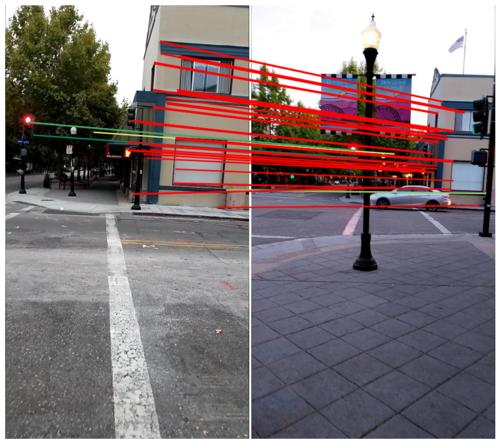
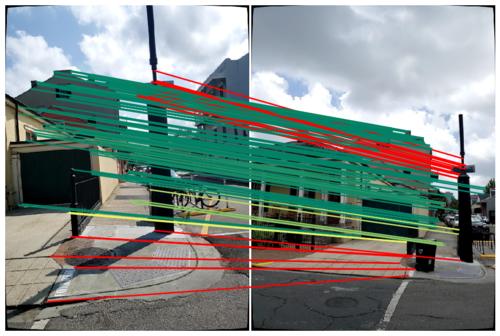
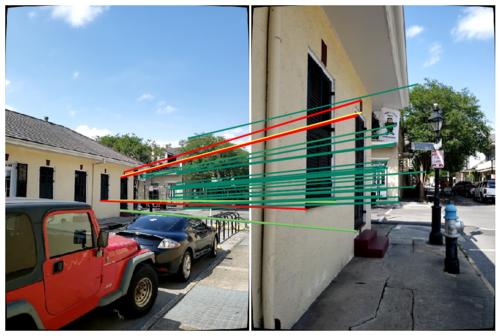
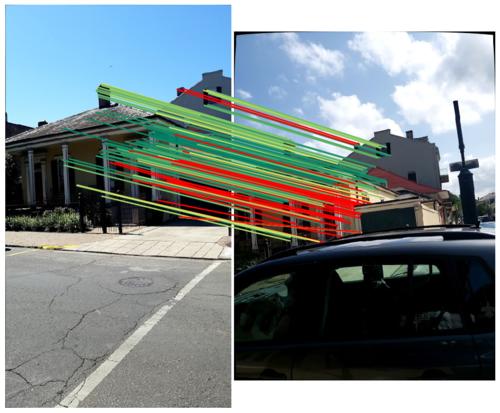
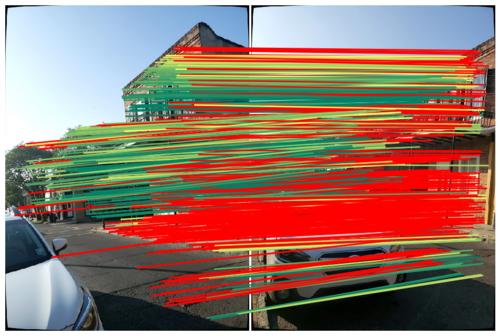
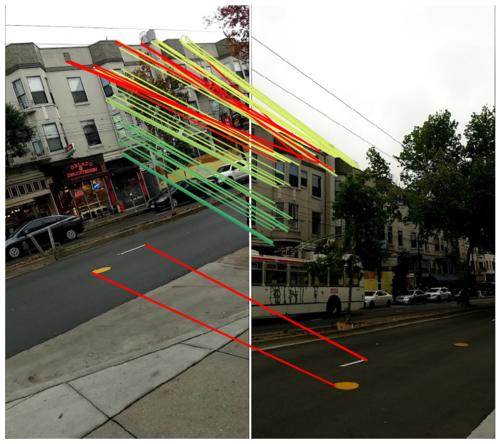
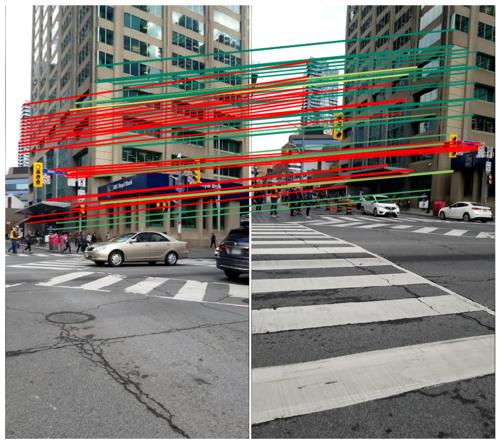
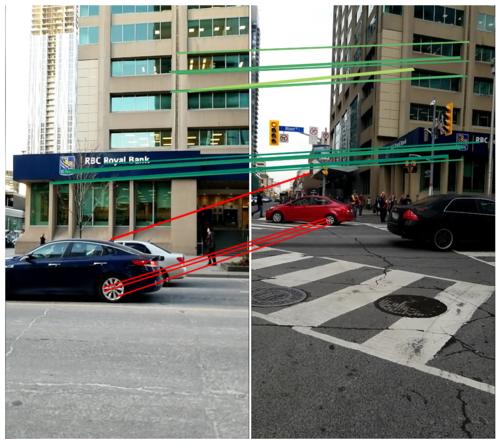
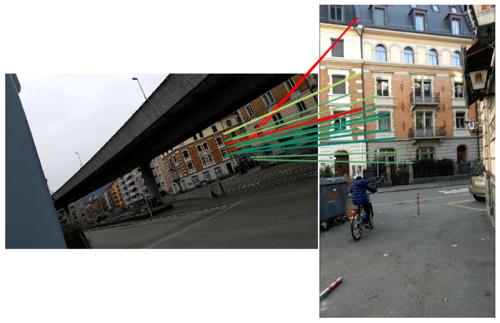
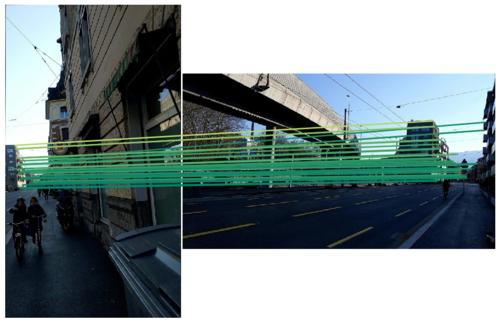
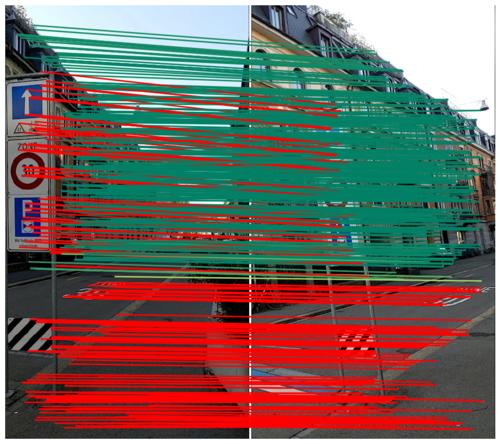
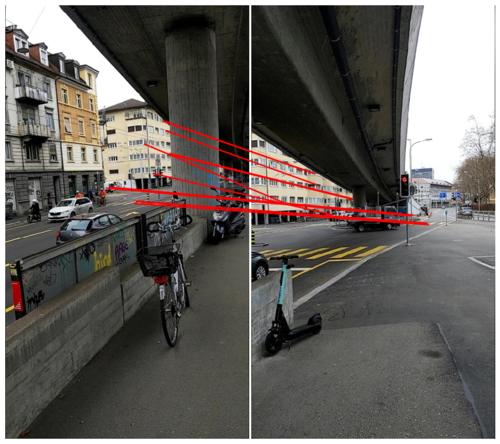
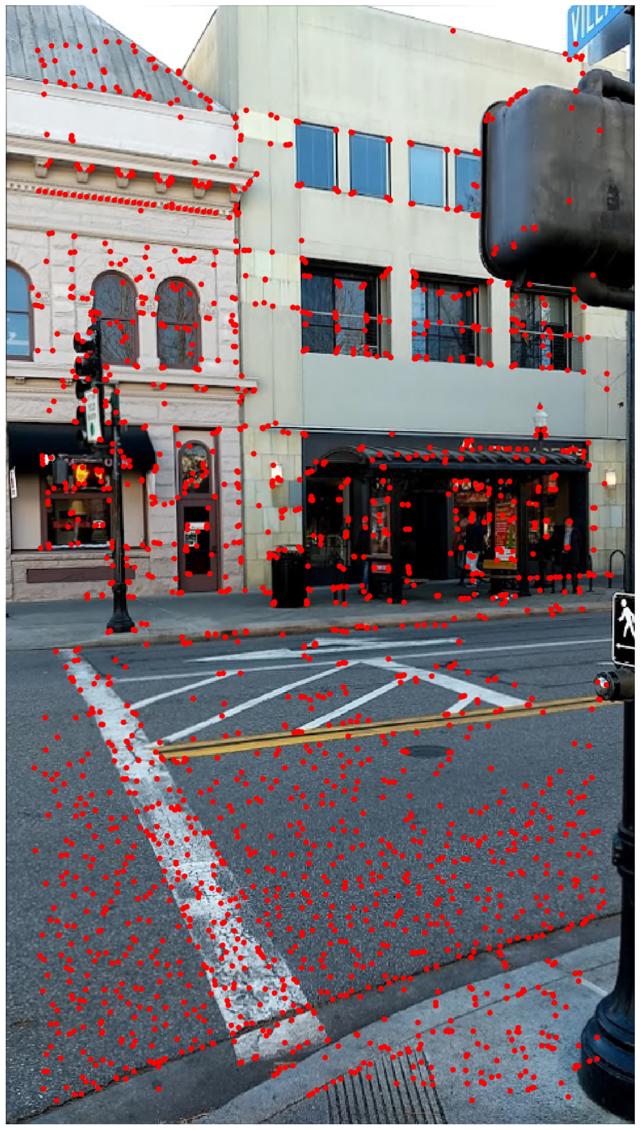
We show the inliers that survive the robust estimation loop (i.e. RANSAC), or those supplied with the submission if using custom matches. As the dataset does not contain depth, we color them based on the symmetric epopilar distance on normalized coordinates: from 0 (green) to 2e-4 (yellow), and in red above it. Note that these occasionally contain false positives.
— Amsterdam —








— Bangkok —



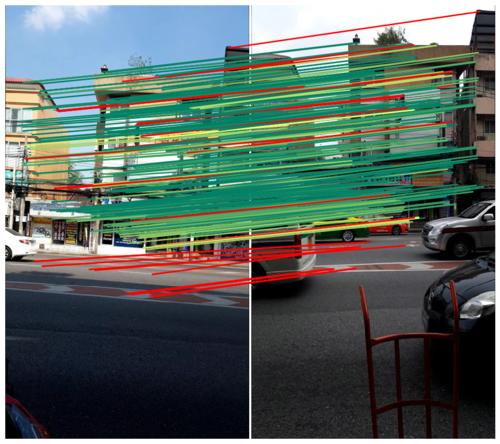

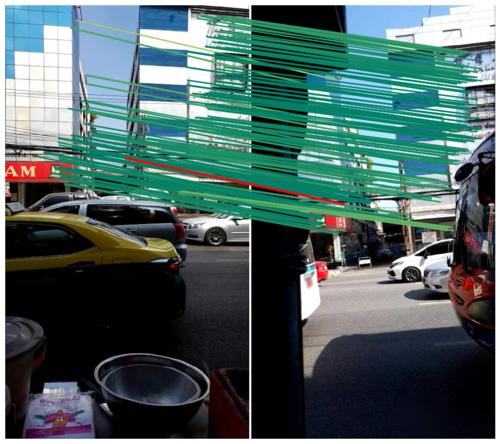
— Barcelona —



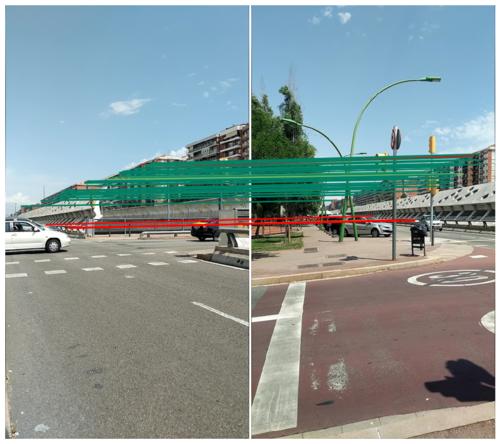




— Buenos Aires —







— Cambridge —







— Cannes —






— Chicago —





— Helsinki —
— Madrid —






— Mountain View —




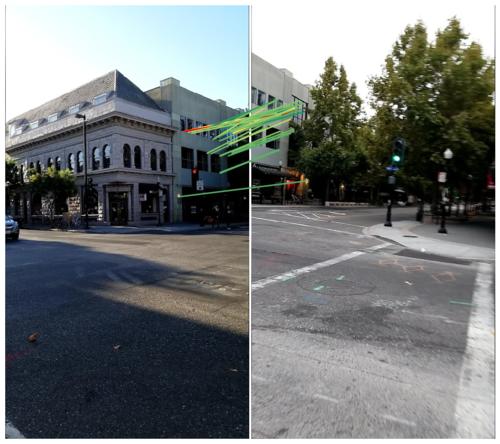


— New Orleans —






— San Francisco —





— Singapore —










— Sydney —








— Tokyo —







— Toronto —





— Zurich —


Google Urban dataset / Multiview track
mAA at 10 degrees: N/A (±0.00000 over 1 run(s) / ±0.11432 over 17 scenes)
Rank (per category): 47 (of 87)
| Scene | Features | Matches (input) |
RegistrationRatio (%) | Number of Landmarks |
Track Length | ATE | mAA(50) | mAA(100) |
| AMS | 2048.0 | 96.33 | 65.61 Rank: 49/87 |
501.51 Rank: 50/87 |
3.054 Rank: 49/87 |
18.27209 Rank: 6/87 |
0.13267 (±0.00000) Rank: 50/87 |
0.18312 (±0.00000) Rank: 50/87 |
| BGK | 2026.9 | 138.38 | 90.57 Rank: 47/87 |
1060.63 Rank: 50/87 |
3.490 Rank: 49/87 |
12.79868 Rank: 20/87 |
0.02427 (±0.00000) Rank: 35/87 |
0.07897 (±0.00000) Rank: 33/87 |
| BCN | 2048.0 | 68.08 | 67.75 Rank: 49/87 |
427.51 Rank: 50/87 |
3.265 Rank: 48/87 |
21.65228 Rank: 4/87 |
0.09834 (±0.00000) Rank: 38/87 |
0.15340 (±0.00000) Rank: 38/87 |
| BAR | 2048.0 | 88.61 | 57.86 Rank: 49/87 |
307.86 Rank: 51/87 |
2.970 Rank: 47/87 |
8.91764 Rank: 4/87 |
0.04529 (±0.00000) Rank: 48/87 |
0.08381 (±0.00000) Rank: 48/87 |
| CAM | 2044.9 | 96.72 | 72.22 Rank: 46/87 |
621.34 Rank: 45/87 |
3.080 Rank: 48/87 |
19.39461 Rank: 9/87 |
0.12665 (±0.00000) Rank: 42/87 |
0.17982 (±0.00000) Rank: 42/87 |
| CAN | 2048.0 | 102.44 | 56.61 Rank: 46/87 |
295.43 Rank: 46/87 |
3.140 Rank: 43/87 |
9.26787 Rank: 5/87 |
0.02416 (±0.00000) Rank: 44/87 |
0.04340 (±0.00000) Rank: 48/87 |
| CHI | 2042.0 | 86.69 | 71.75 Rank: 46/87 |
212.35 Rank: 47/87 |
3.801 Rank: 47/87 |
40.96977 Rank: 6/87 |
0.04407 (±0.00000) Rank: 40/87 |
0.08595 (±0.00000) Rank: 43/87 |
| HEL | 2043.3 | 217.46 | 88.88 Rank: 46/87 |
1160.77 Rank: 49/87 |
3.567 Rank: 49/87 |
11.08410 Rank: 7/87 |
0.22940 (±0.00000) Rank: 44/87 |
0.36166 (±0.00000) Rank: 44/87 |
| MAD | 2046.3 | 63.67 | 72.54 Rank: 49/87 |
440.77 Rank: 49/87 |
3.052 Rank: 49/87 |
3.58764 Rank: 5/87 |
0.02295 (±0.00000) Rank: 47/87 |
0.05904 (±0.00000) Rank: 47/87 |
| MTV | 2047.9 | 76.55 | 79.03 Rank: 45/87 |
471.70 Rank: 50/87 |
3.327 Rank: 49/87 |
13.99321 Rank: 8/87 |
0.15534 (±0.00000) Rank: 43/87 |
0.23691 (±0.00000) Rank: 44/87 |
| NOR | 2038.9 | 81.58 | 55.70 Rank: 48/87 |
243.35 Rank: 50/87 |
2.918 Rank: 47/87 |
6.24780 Rank: 5/87 |
0.05990 (±0.00000) Rank: 46/87 |
0.08987 (±0.00000) Rank: 47/87 |
| SF | 2041.1 | 106.57 | 75.02 Rank: 46/87 |
630.12 Rank: 48/87 |
3.269 Rank: 46/87 |
12.44205 Rank: 5/87 |
0.10539 (±0.00000) Rank: 47/87 |
0.17806 (±0.00000) Rank: 46/87 |
| SG | 2033.1 | 117.35 | 61.92 Rank: 46/87 |
451.99 Rank: 48/87 |
3.115 Rank: 45/87 |
12.74417 Rank: 7/87 |
0.07019 (±0.00000) Rank: 46/87 |
0.10218 (±0.00000) Rank: 46/87 |
| SYD | 2019.0 | 103.78 | 64.81 Rank: 49/87 |
412.39 Rank: 49/87 |
2.906 Rank: 50/87 |
9.12875 Rank: 6/87 |
0.07623 (±0.00000) Rank: 49/87 |
0.12006 (±0.00000) Rank: 49/87 |
| TOK | 2039.4 | 134.61 | 80.79 Rank: 46/87 |
880.94 Rank: 48/87 |
3.469 Rank: 47/87 |
9.42266 Rank: 4/87 |
0.41894 (±0.00000) Rank: 46/87 |
0.48850 (±0.00000) Rank: 46/87 |
| TOR | 2041.5 | 49.36 | 63.25 Rank: 46/87 |
288.99 Rank: 49/87 |
3.053 Rank: 44/87 |
10.68119 Rank: 8/87 |
0.03684 (±0.00000) Rank: 46/87 |
0.07357 (±0.00000) Rank: 46/87 |
| ZRH | 2043.6 | 102.26 | 71.30 Rank: 44/87 |
813.66 Rank: 46/87 |
3.063 Rank: 49/87 |
11.35785 Rank: 5/87 |
0.03575 (±0.00000) Rank: 45/87 |
0.06790 (±0.00000) Rank: 46/87 |
| Avg | 2041.2 | 101.79 | 70.33 Rank: 48/87 |
542.43 Rank: 48/87 |
3.208 Rank: 48/87 |
13.64484 Rank: 5/87 |
0.10037 (±0.00000) Rank: 47/87 |
0.15213 (±0.00000) Rank: 47/87 |
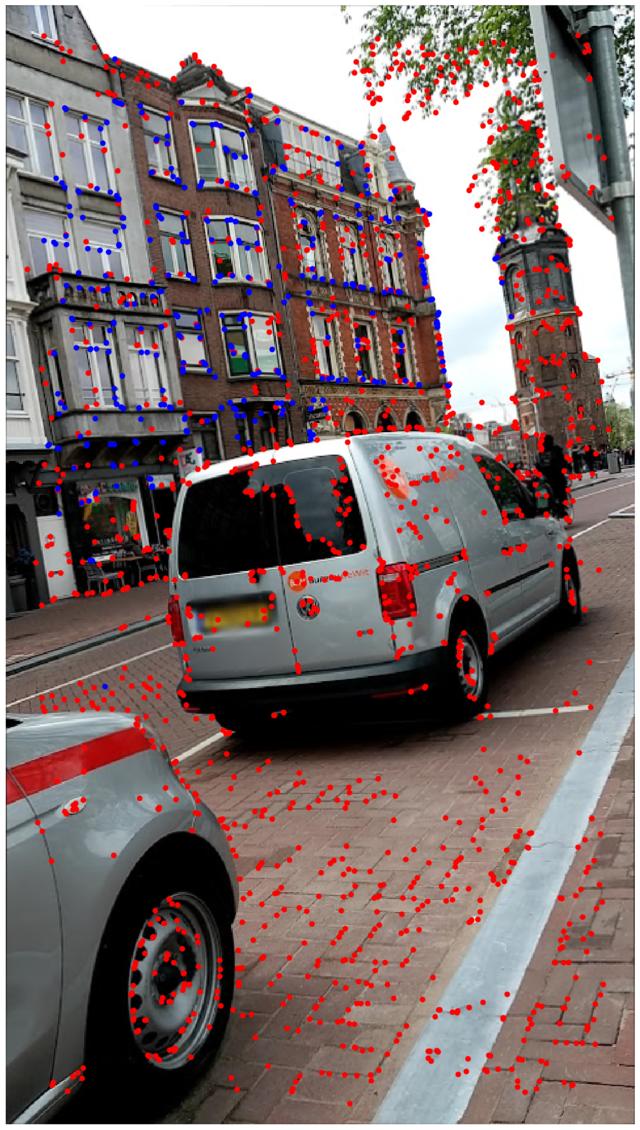
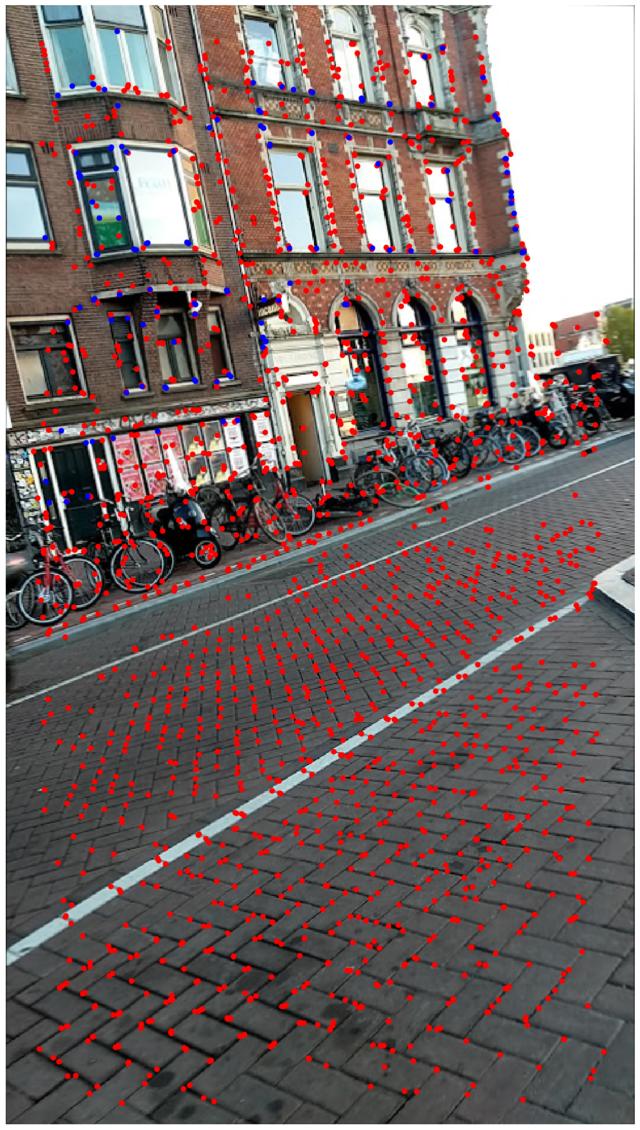
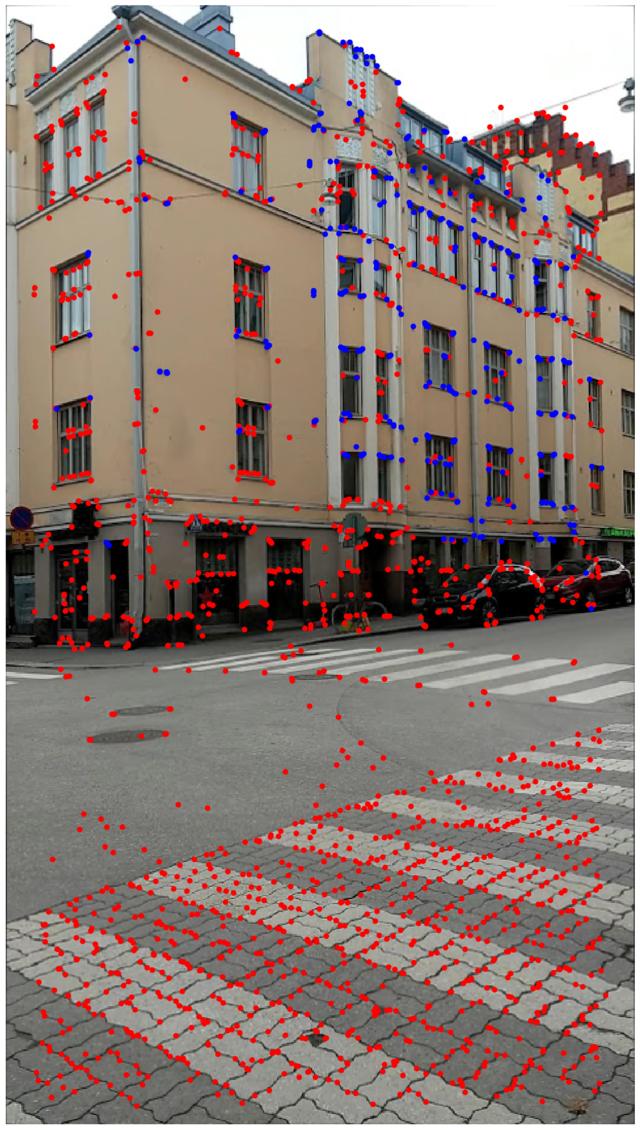
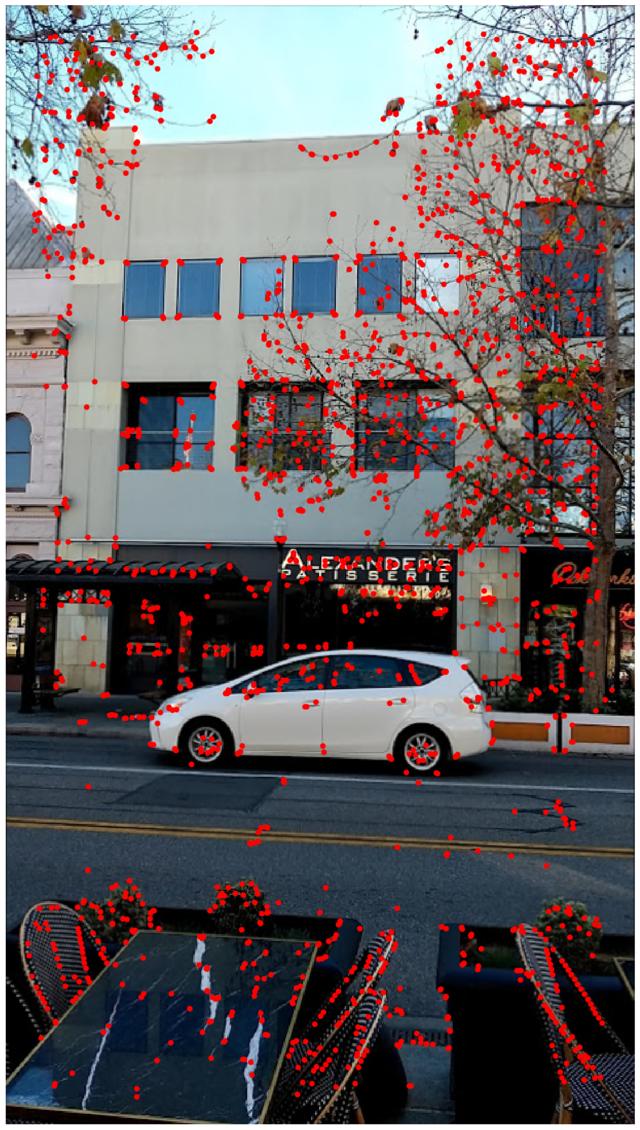
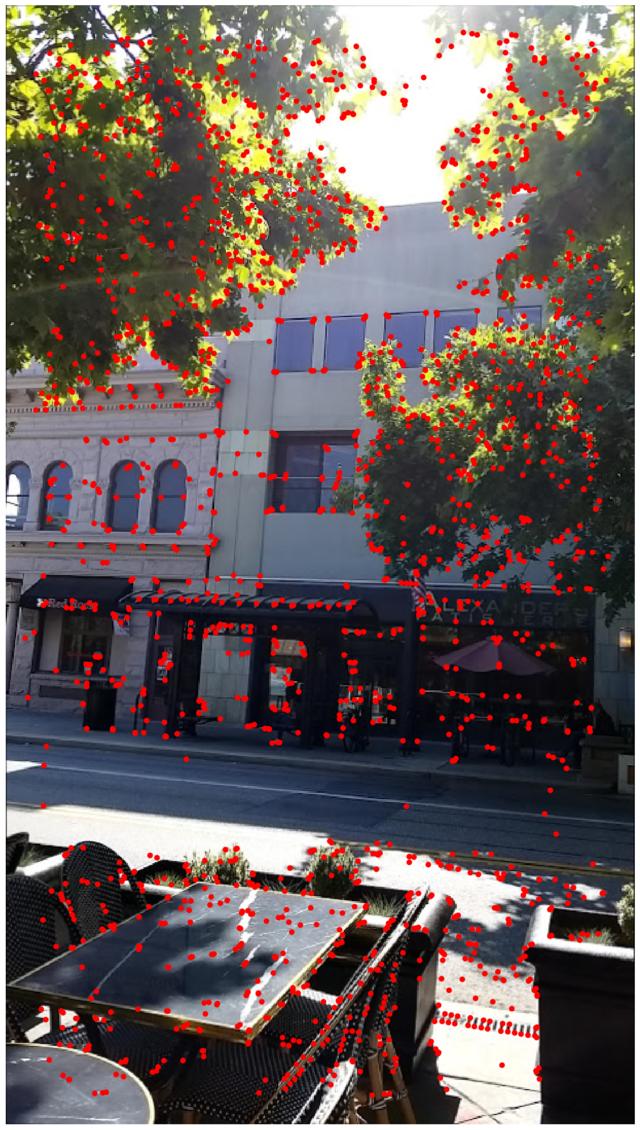
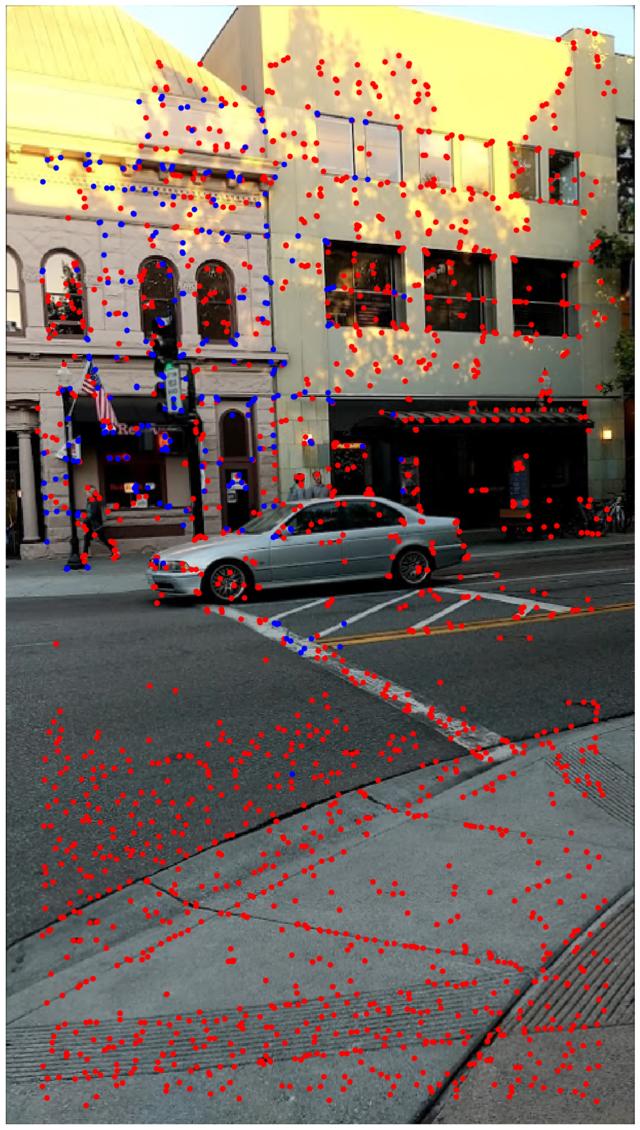
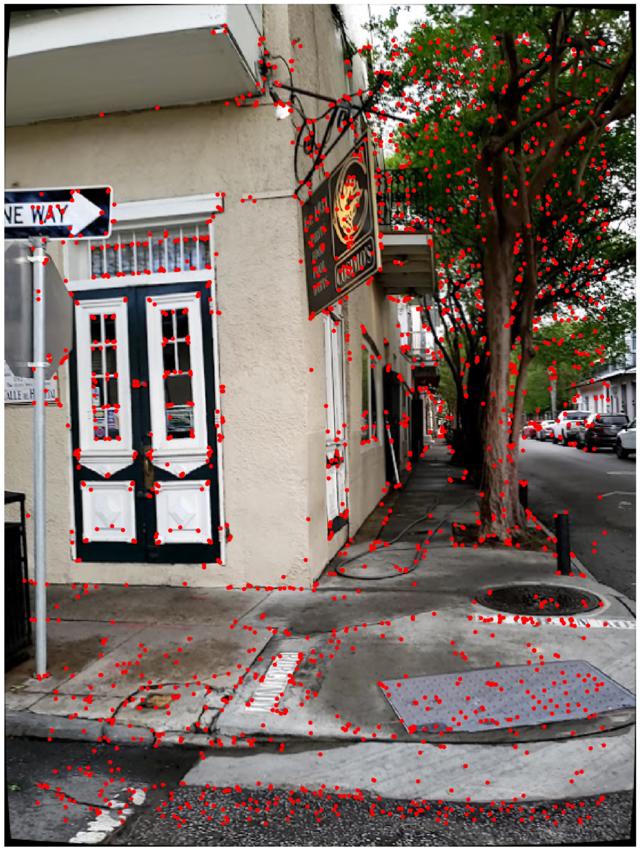
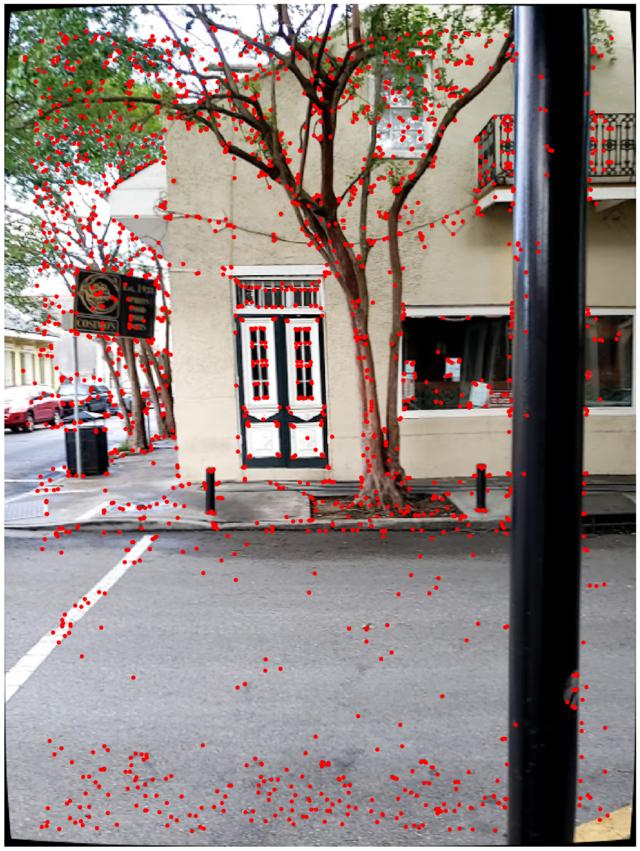
In the multi-view track we reconstruct the scene with Structure-from-Motion (Colmap) with small sets of images. We show the results for one bag of 10 images. Keypoints are drawn in blue if they are part of the model, and in red otherwise.
— Amsterdam —





— Bangkok —

— Barcelona —



— Buenos Aires —






— Cambridge —


— Cannes —


— Chicago —


— Helsinki —


— Madrid —



— Mountain View —
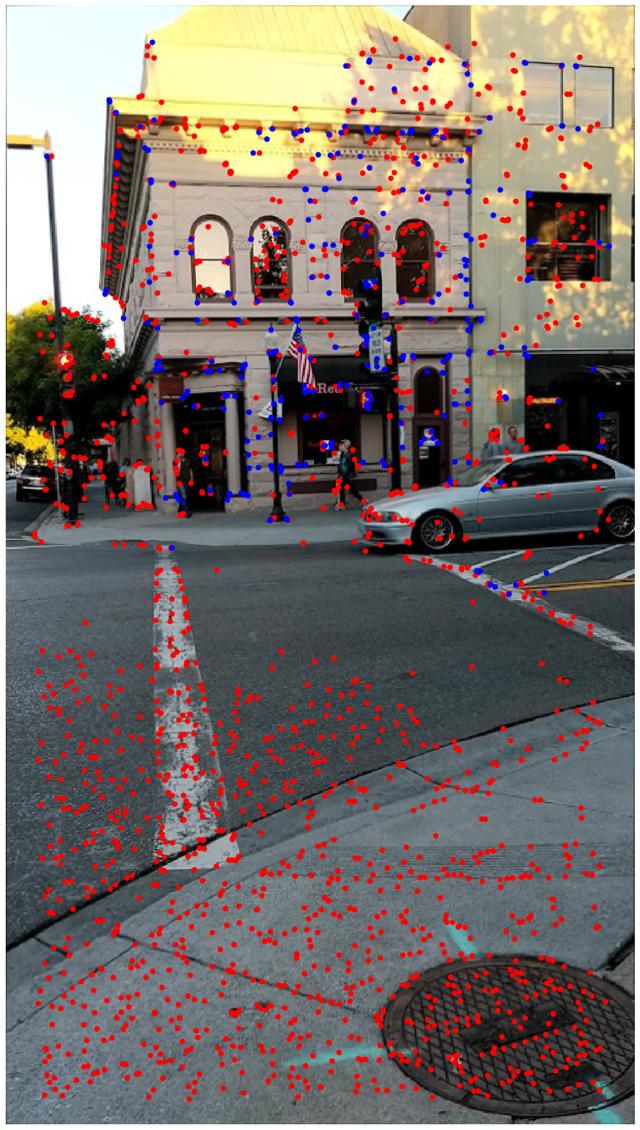


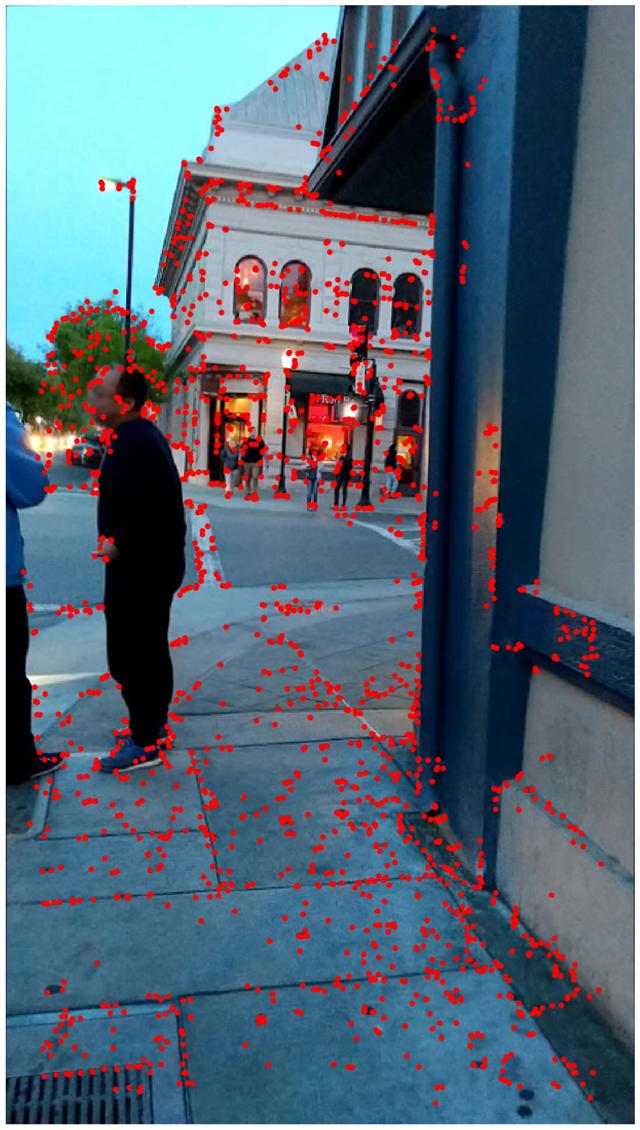
— New Orleans —




— San Francisco —
— Singapore —





— Sydney —

— Tokyo —


— Toronto —

— Zurich —