Submission ID: ce67800d
COTR guided matching
Processed: 21-06-07. Download link: ce67800df501292f-cotr_guided_2048_disk.json
This page ranks the submission against all others using the same number of keypoints, regardless of descriptor size. Please hover over table headers for descriptions on metrics and full scene names.
- Phototourism dataset: Stereo track / Multiview track
- Prague Parks dataset: Stereo track / Multiview track
- Google Urban dataset: Stereo track / Multiview track
Metadata
- Authors: Wei Jiang (contact)
- Keypoint: disk
- Descriptor: not-available (0 none: 0 bytes)
- Number of features: 2048
- Summary: Image with 2048 disk keypoints(feature free), matched with COTR. Further pruned with degensac.
- Paper: https://arxiv.org/abs/2103.14167
- Website: https://jiangwei221.github.io/vids/cotr/README.html
- Processing date: 21-06-07
Phototourism dataset / Stereo track
mAA at 10 degrees: 0.55225 (±0.00000 over 1 run(s) / ±0.13163 over 9 scenes)
Rank (per category): 35 (of 87)
| Scene | Features | Matches (raw) |
Matches (final) |
Rep. @ 3 px. | MS @ 3 px. | mAA(5o) | mAA(10o) |
| BM | 2048.0 | — | 726.2 | 0.611 Rank: 4/87 |
0.935 Rank: 16/87 |
0.25474 (±0.00000) Rank: 51/87 |
0.39048 (±0.00000) Rank: 50/87 |
| FCS | 2048.0 | — | 514.3 | 0.415 Rank: 24/87 |
0.888 Rank: 10/87 |
0.61662 (±0.00000) Rank: 38/87 |
0.73359 (±0.00000) Rank: 39/87 |
| LMS | 2048.0 | — | 444.7 | 0.388 Rank: 58/87 |
0.665 Rank: 63/87 |
0.55049 (±0.00000) Rank: 39/87 |
0.68879 (±0.00000) Rank: 35/87 |
| LB | 2048.0 | — | 398.3 | 0.450 Rank: 9/87 |
0.748 Rank: 13/87 |
0.46610 (±0.00000) Rank: 51/87 |
0.57673 (±0.00000) Rank: 40/87 |
| MC | 2048.0 | — | 675.6 | 0.550 Rank: 1/87 |
0.911 Rank: 24/87 |
0.40147 (±0.00000) Rank: 51/87 |
0.55785 (±0.00000) Rank: 3/87 |
| MR | 2048.0 | — | 499.3 | 0.443 Rank: 12/87 |
0.922 Rank: 15/87 |
0.29339 (±0.00000) Rank: 3/87 |
0.40115 (±0.00000) Rank: 12/87 |
| PSM | 2048.0 | — | 425.6 | 0.371 Rank: 12/87 |
0.740 Rank: 3/87 |
0.20376 (±0.00000) Rank: 35/87 |
0.35038 (±0.00000) Rank: 36/87 |
| SF | 2048.0 | — | 465.9 | 0.378 Rank: 24/87 |
0.815 Rank: 15/87 |
0.49965 (±0.00000) Rank: 33/87 |
0.62729 (±0.00000) Rank: 35/87 |
| SPC | 2048.0 | — | 550.8 | 0.476 Rank: 3/87 |
0.858 Rank: 5/87 |
0.47924 (±0.00000) Rank: 38/87 |
0.64394 (±0.00000) Rank: 36/87 |
| Avg | 2048.0 | — | 522.3 | 0.454 Rank: 5/87 |
0.831 Rank: 5/87 |
0.41838 (±0.00000) Rank: 35/87 |
0.55225 (±0.00000) Rank: 35/87 |
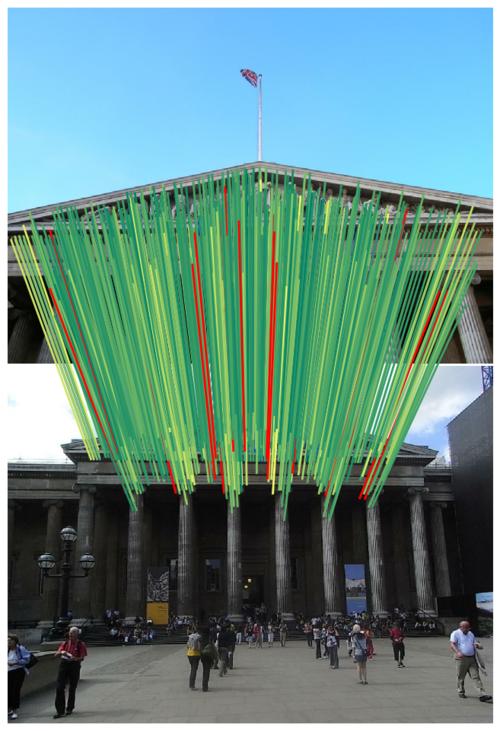
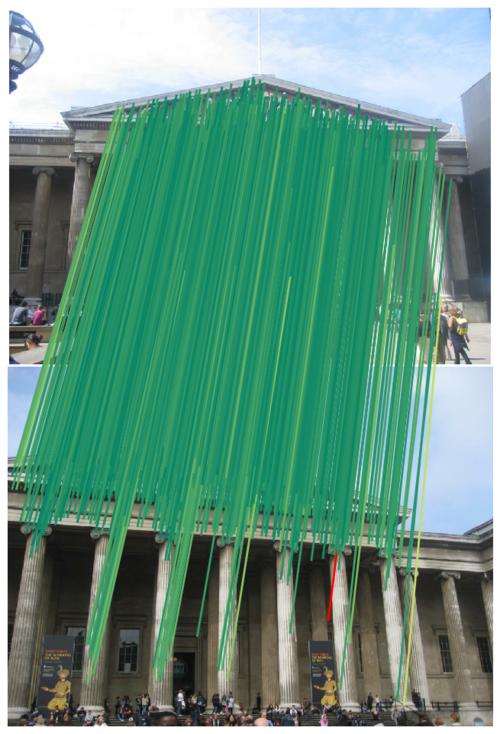
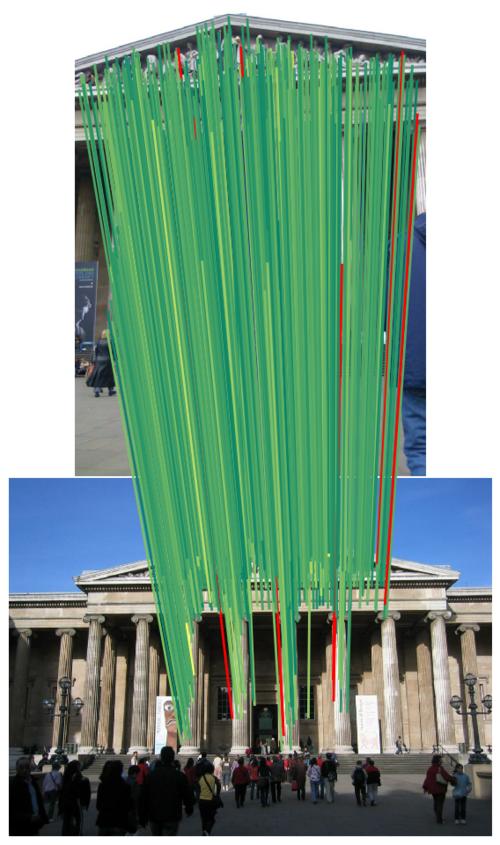
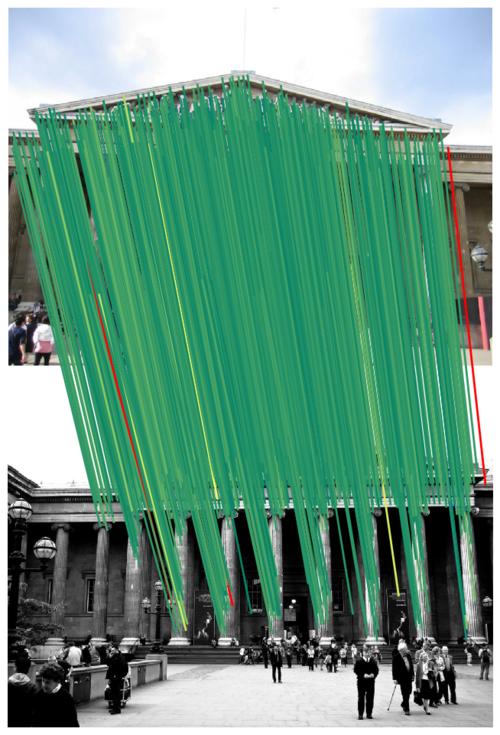
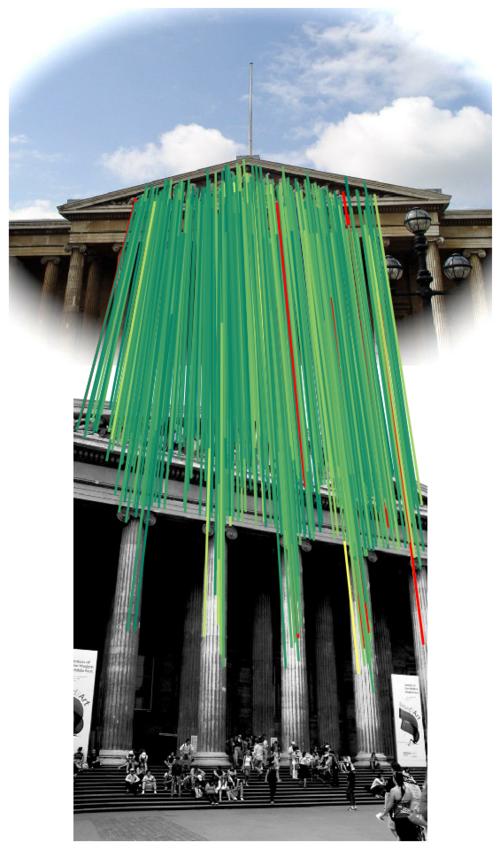
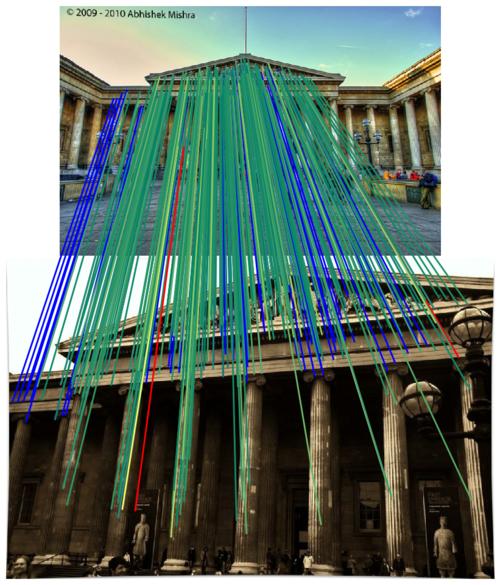
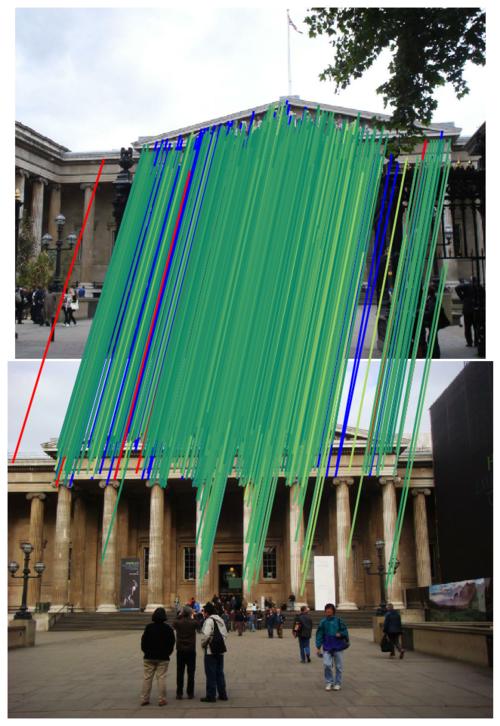
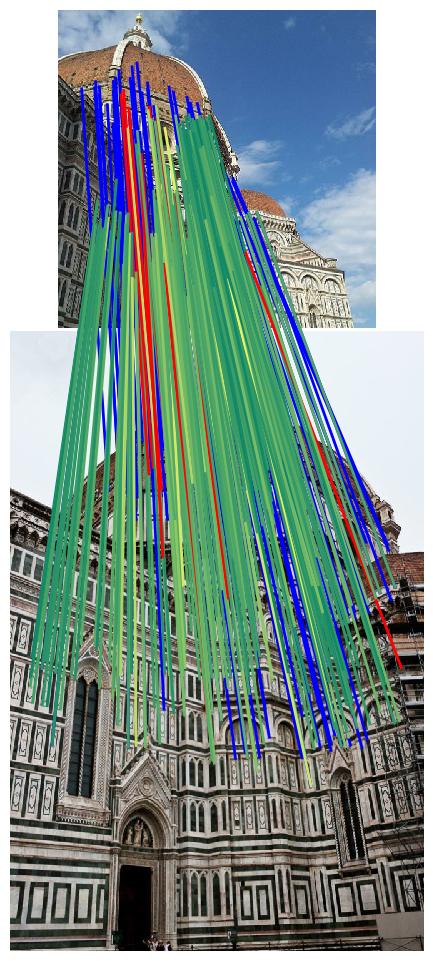
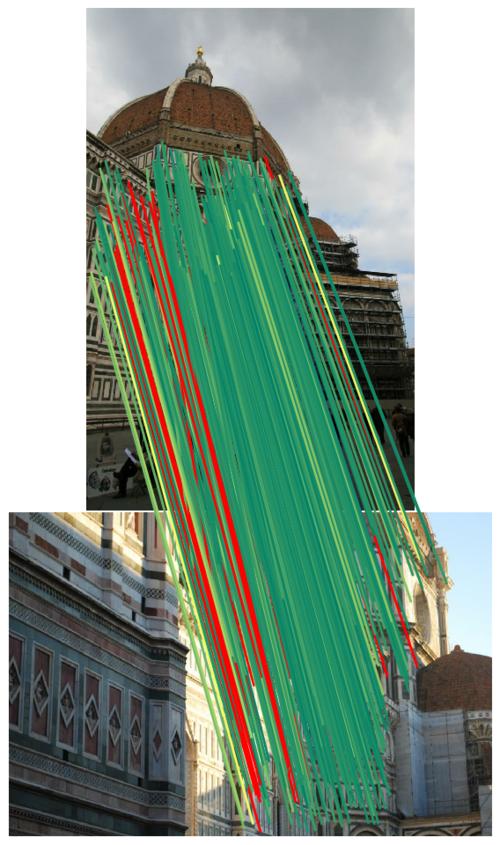
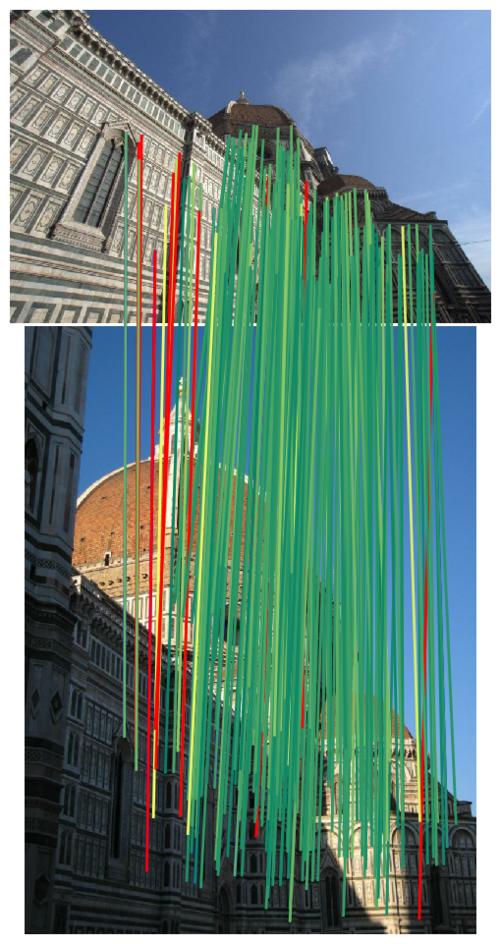
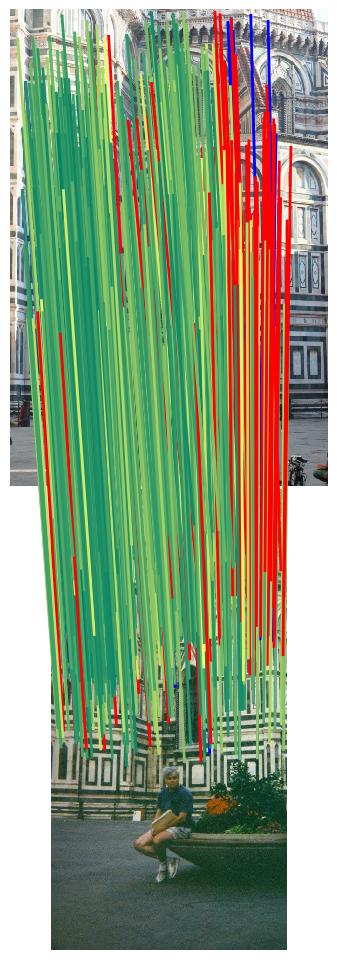
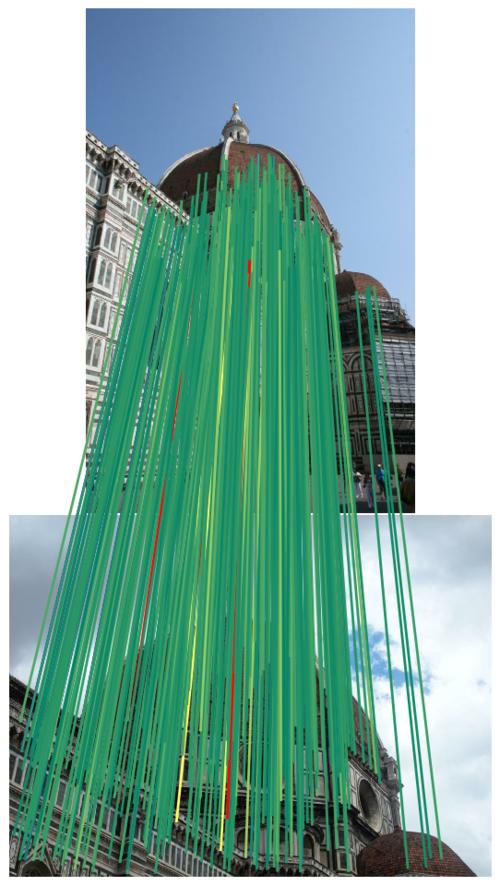
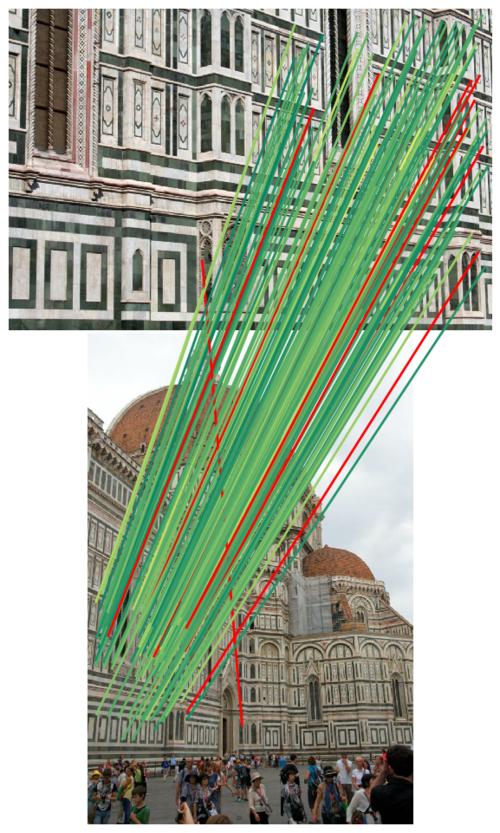
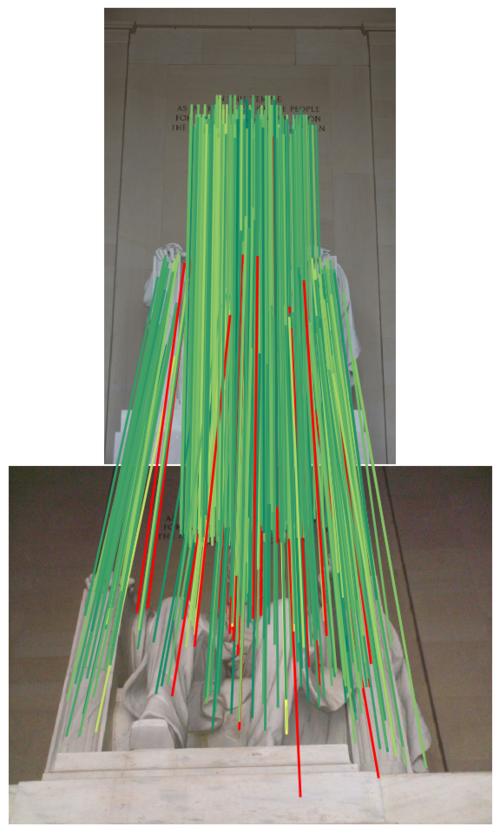
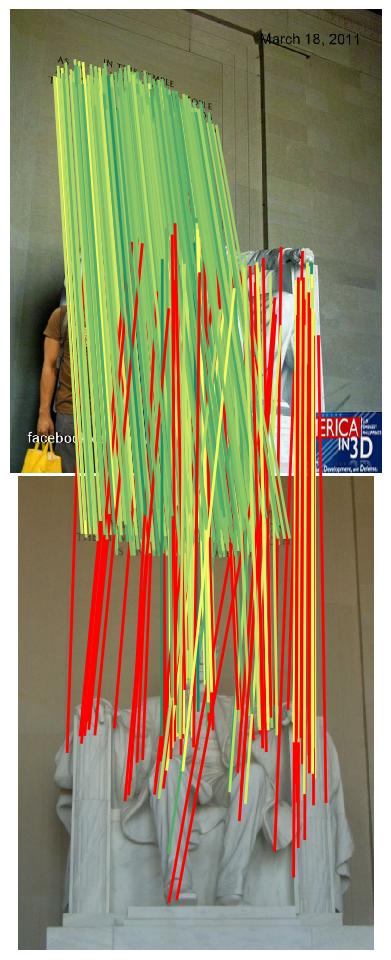
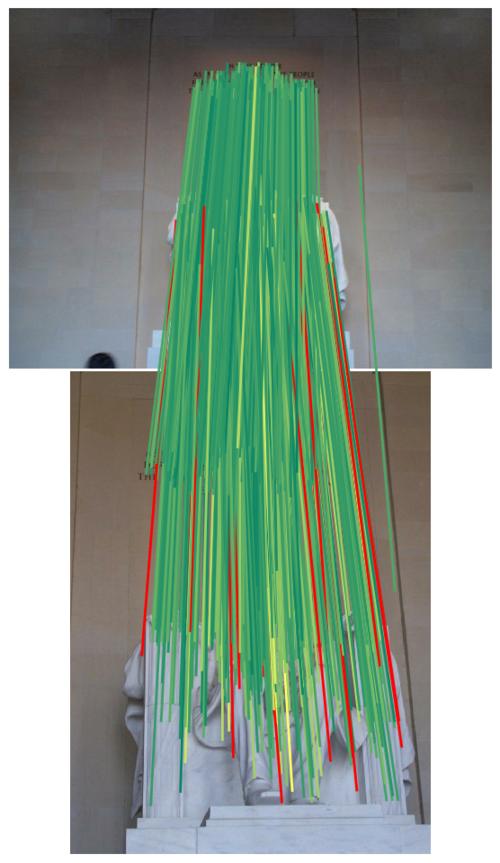
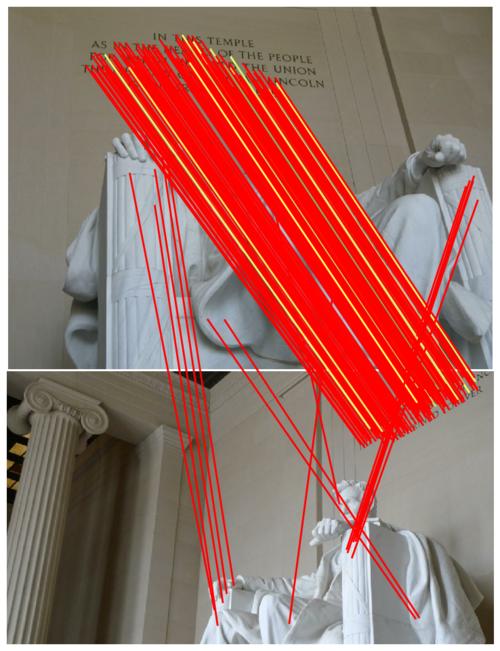
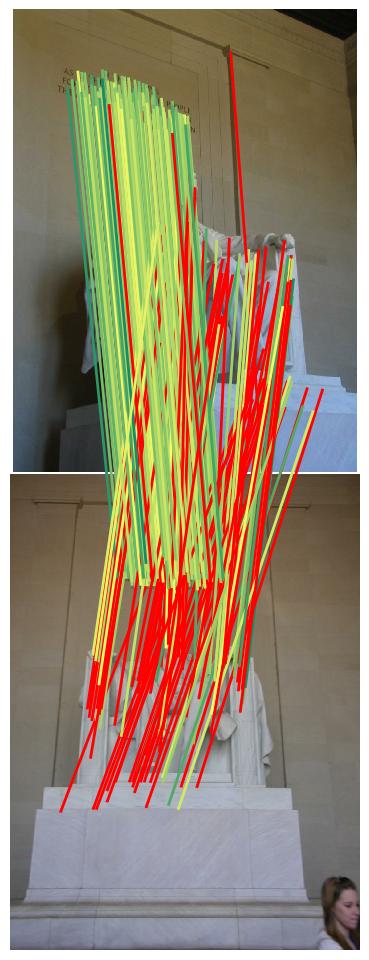
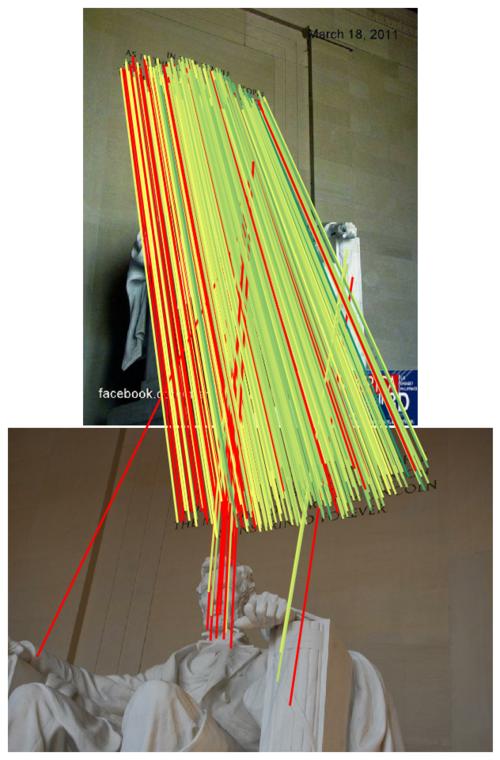
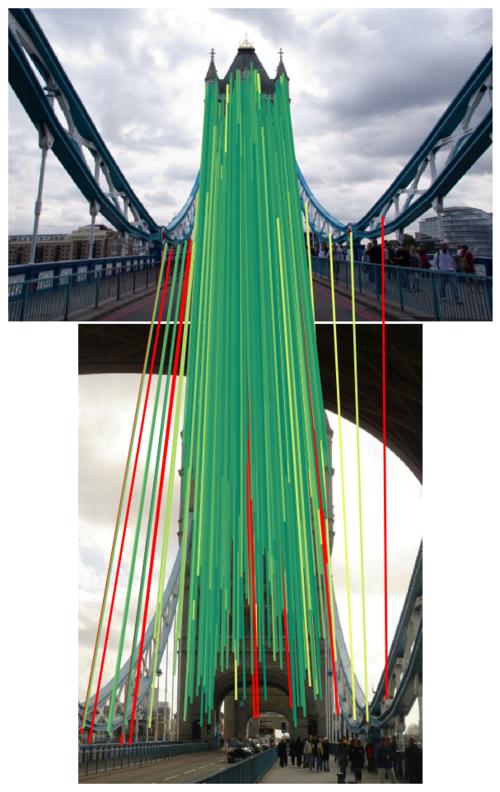
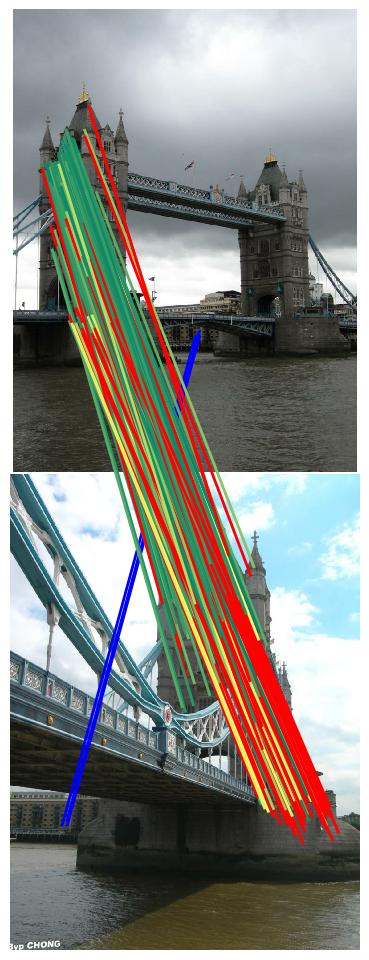
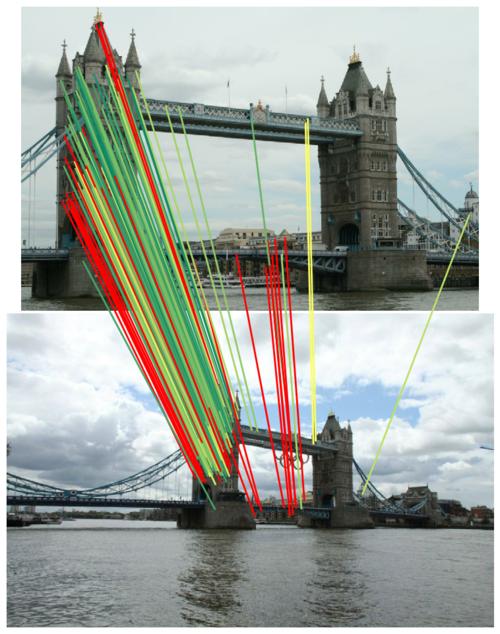
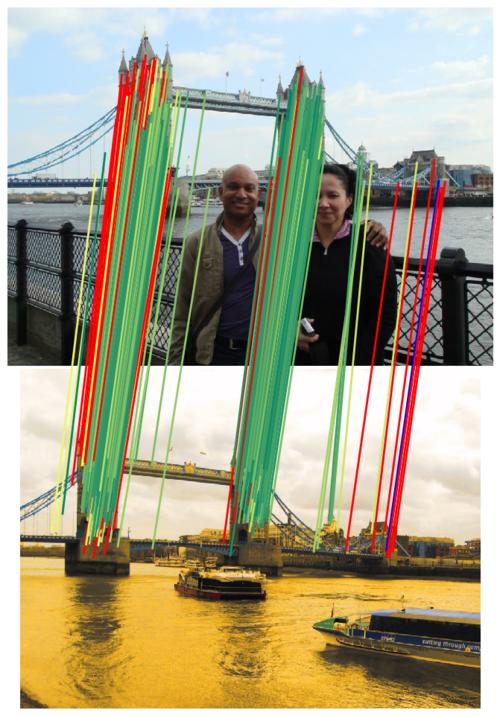
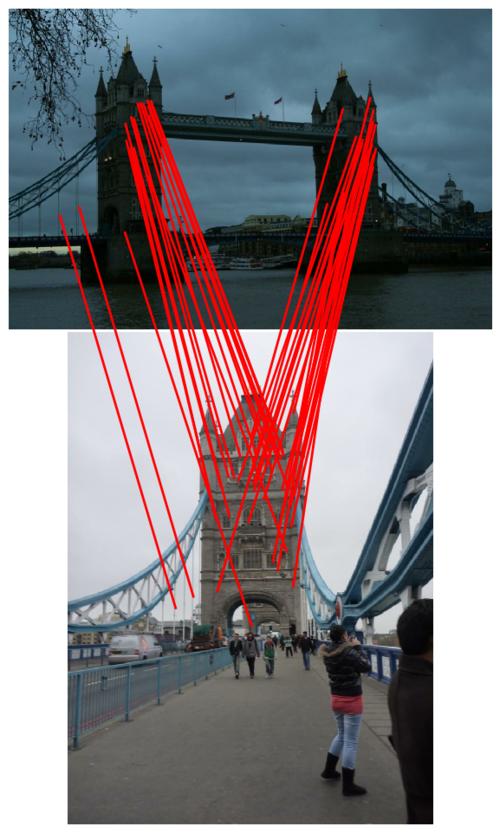
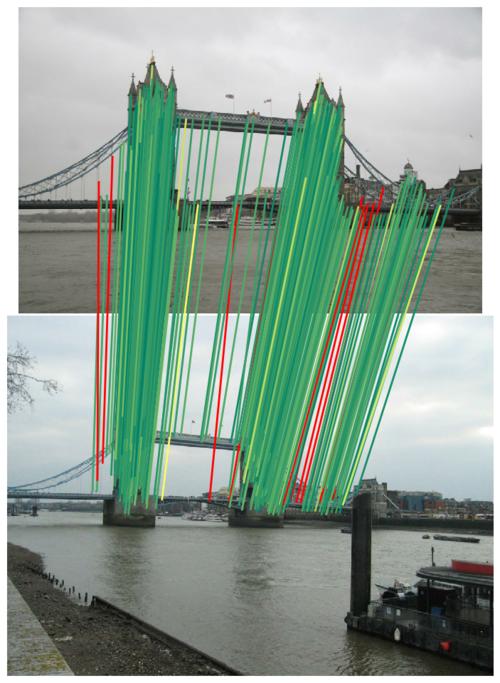
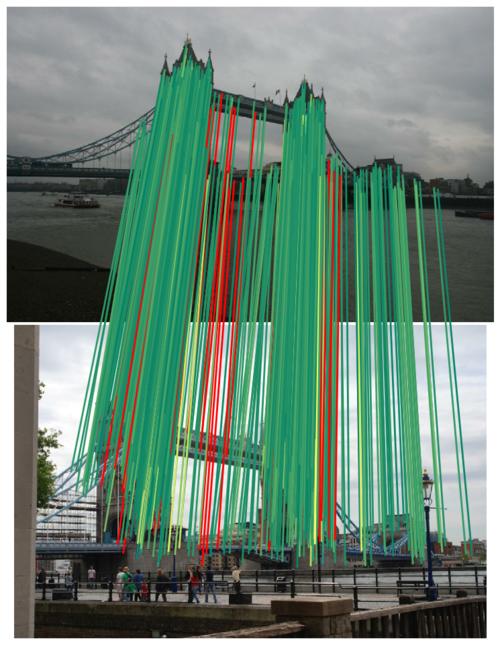
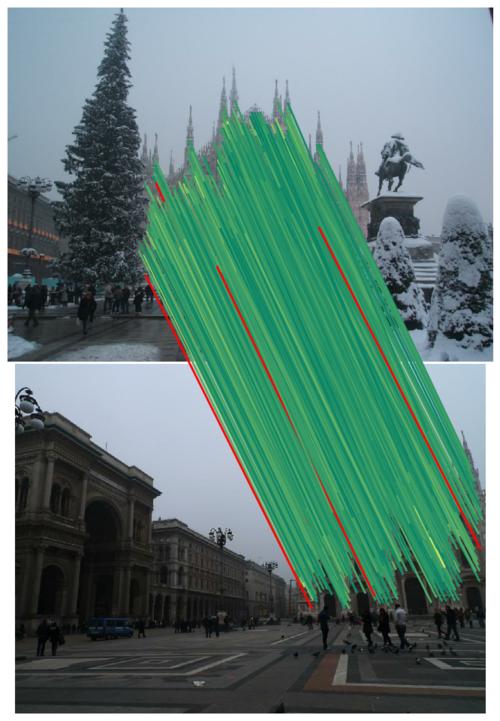
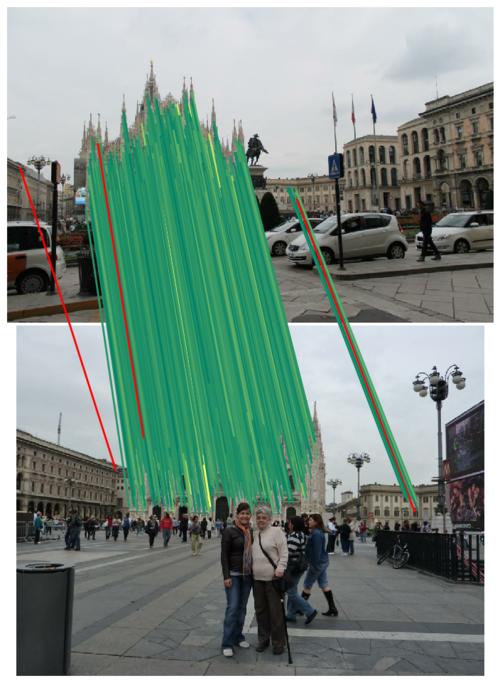
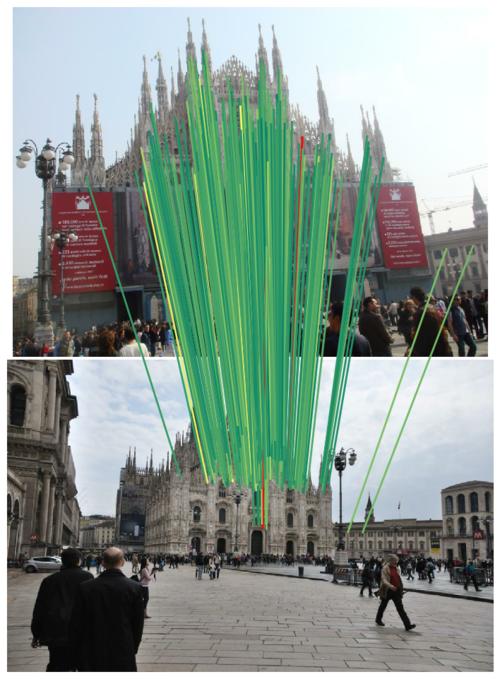
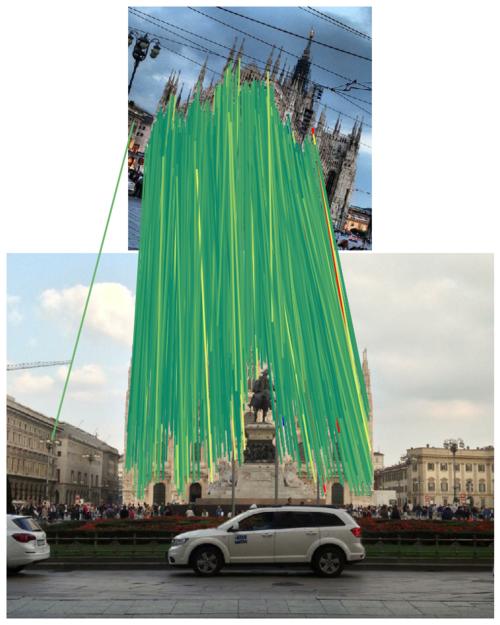
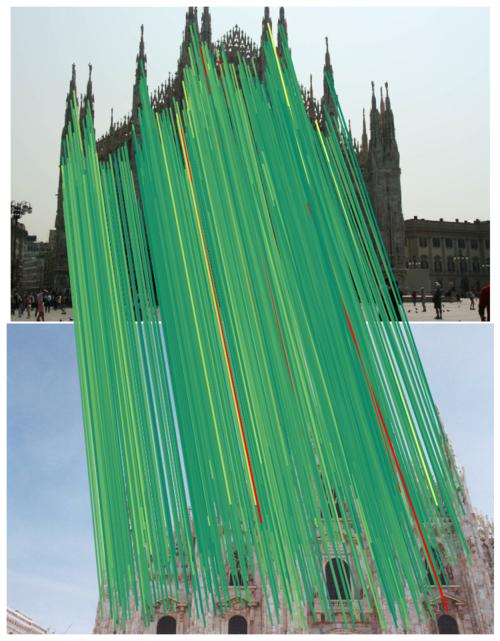
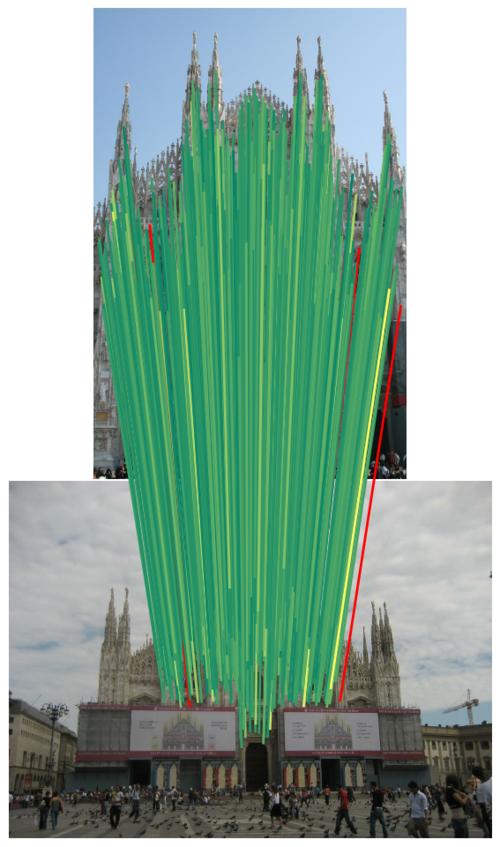
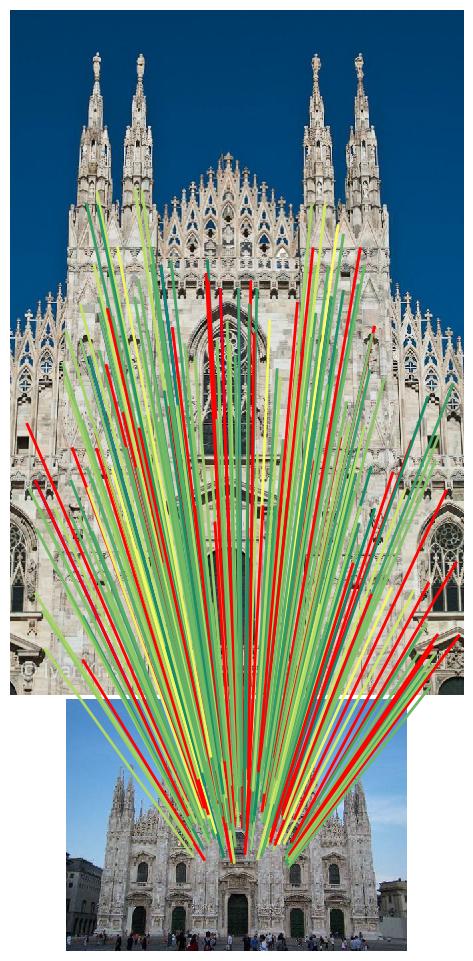
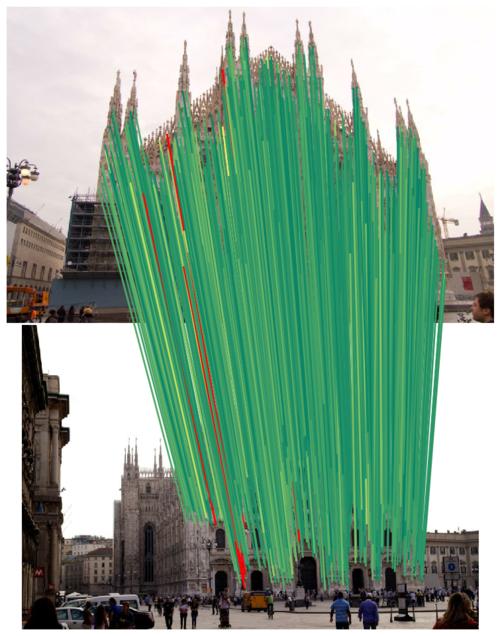
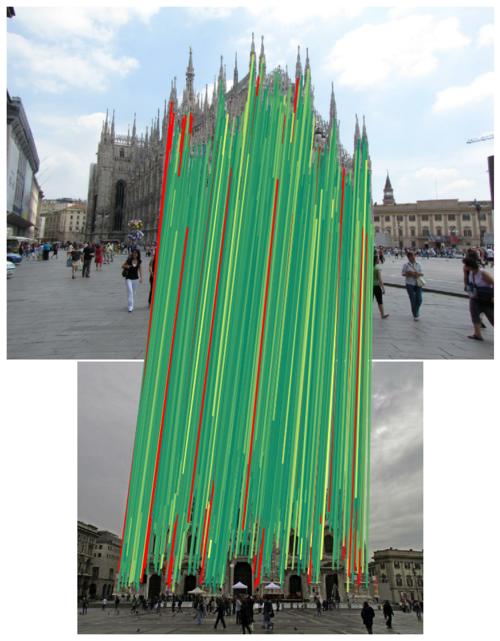
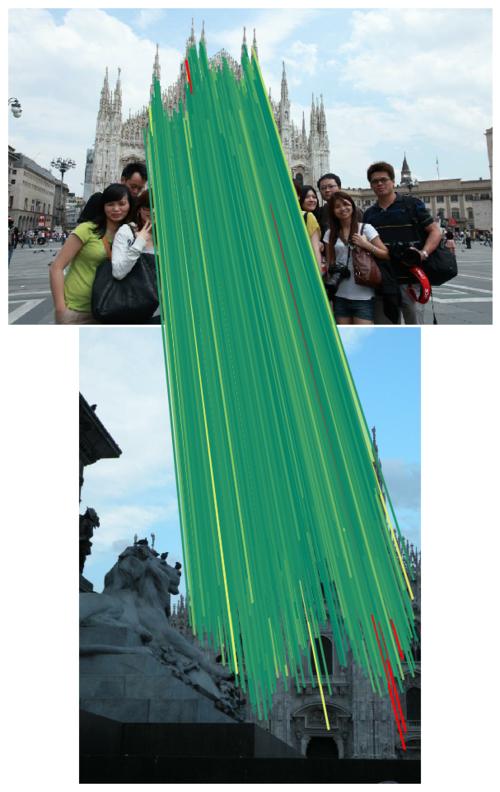
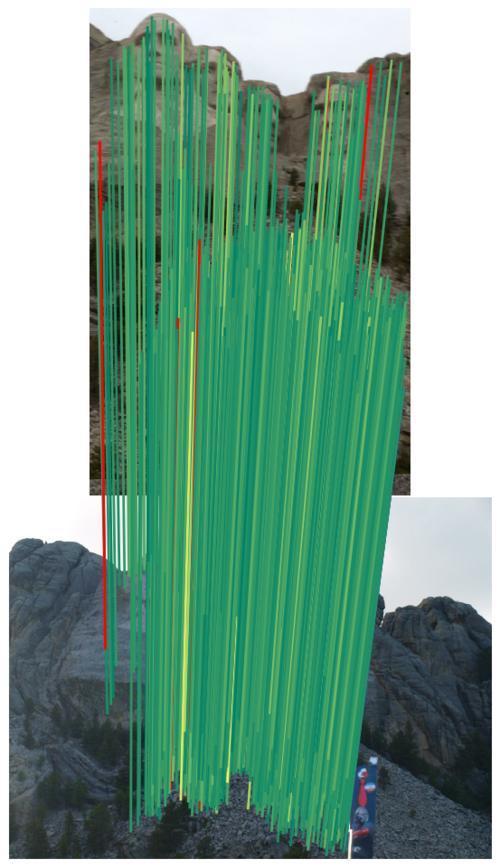
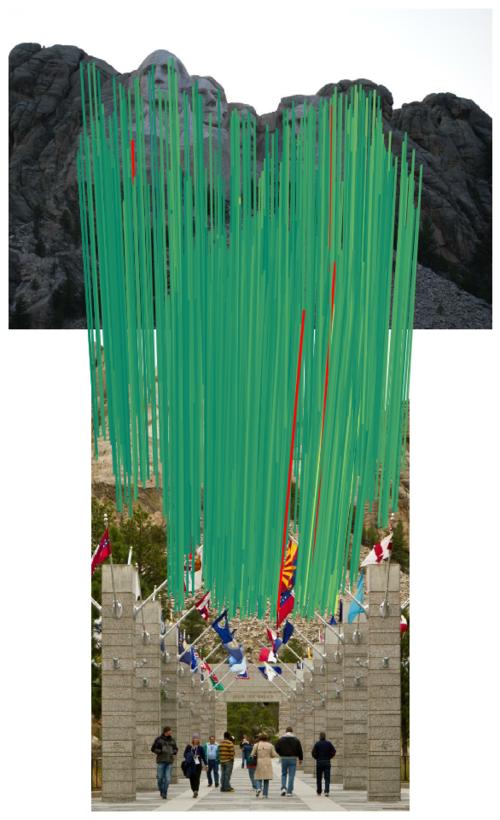
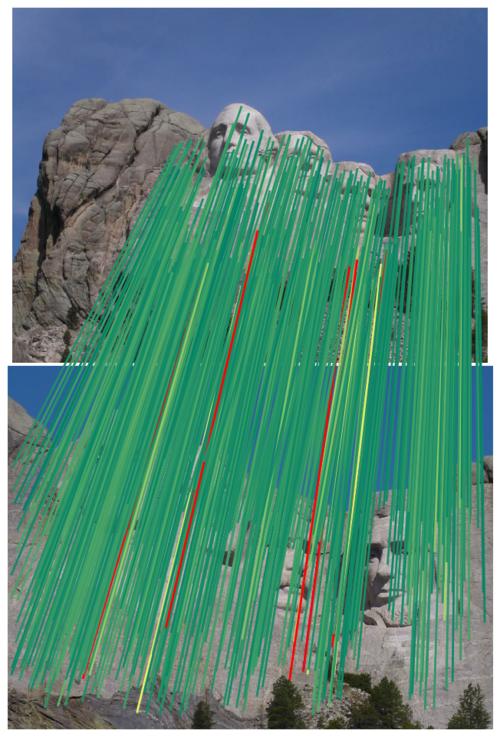
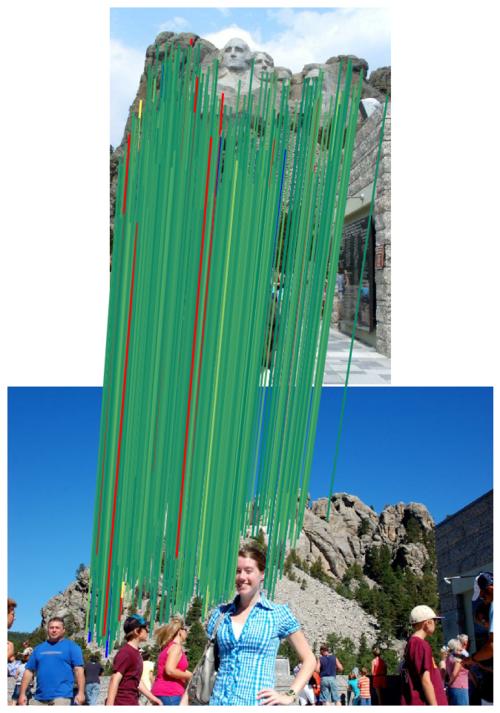
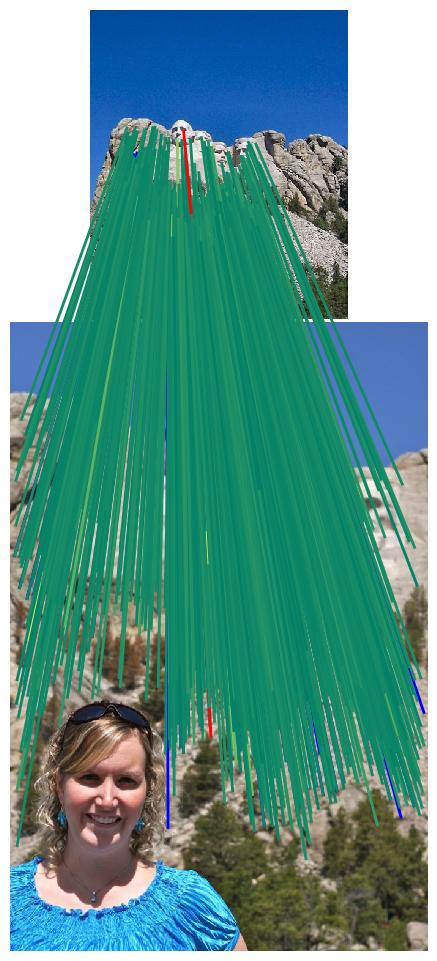
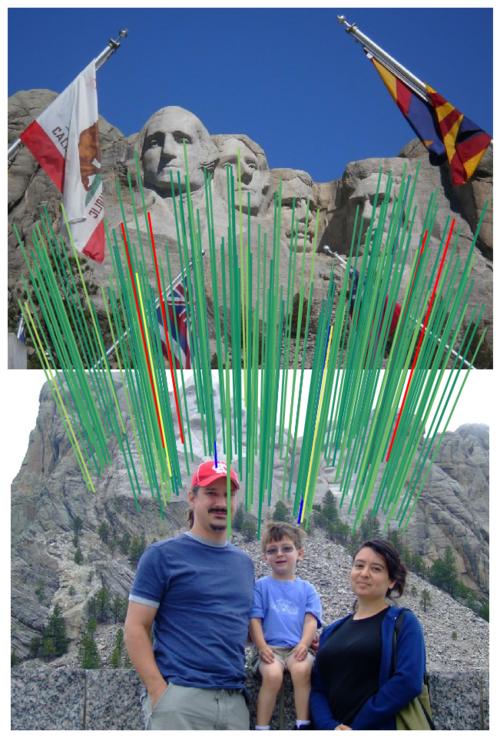
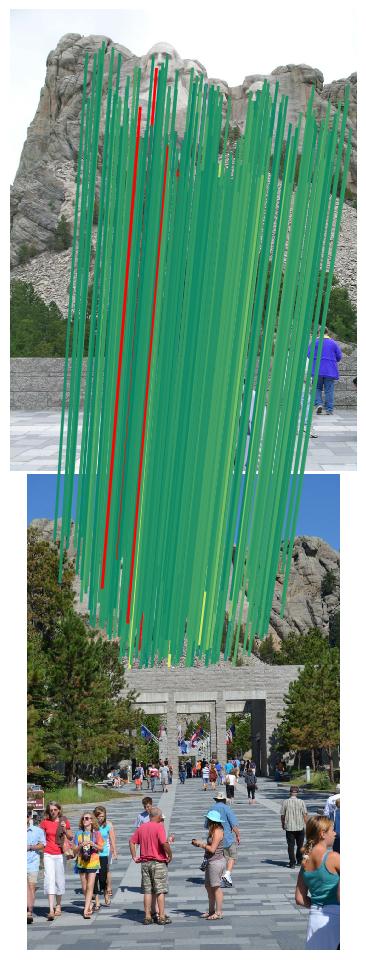
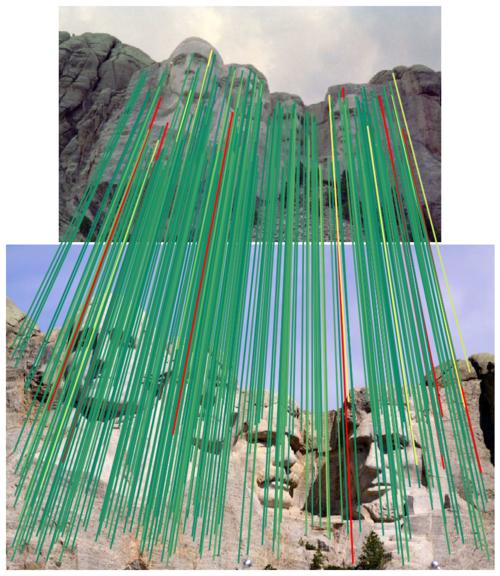
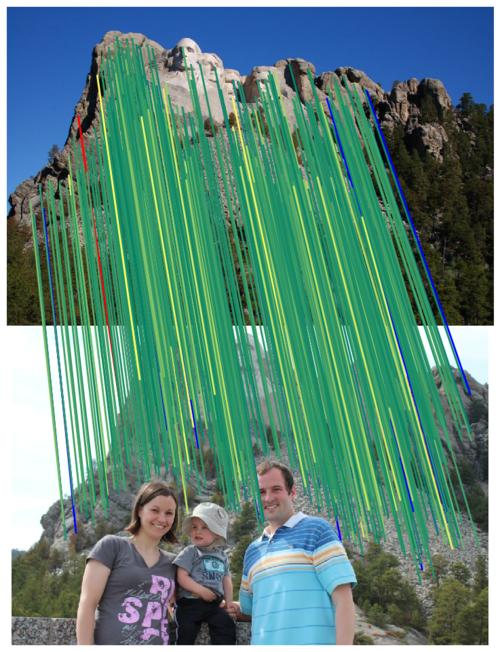
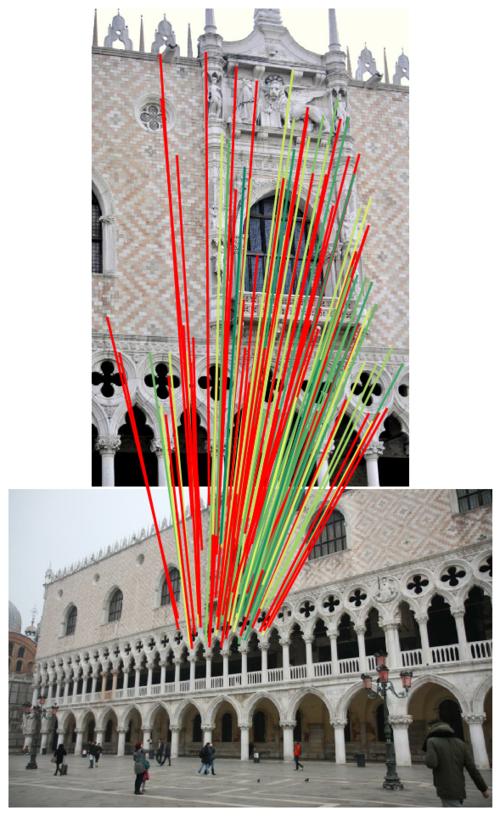
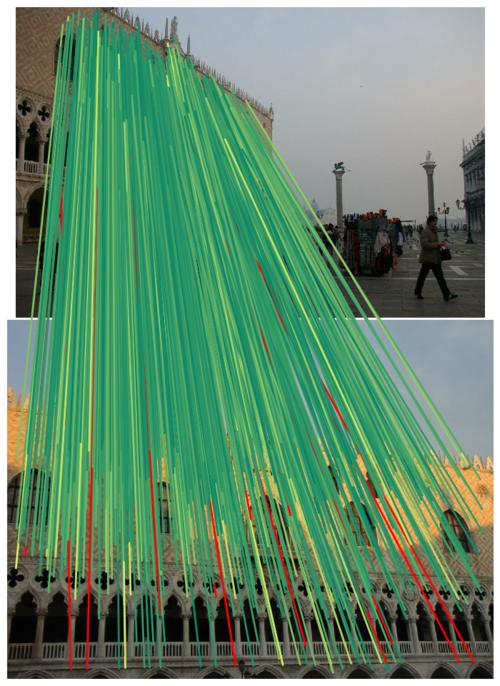
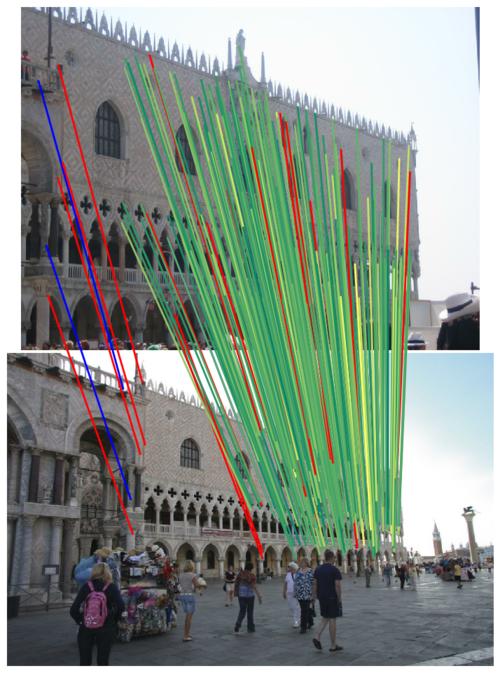
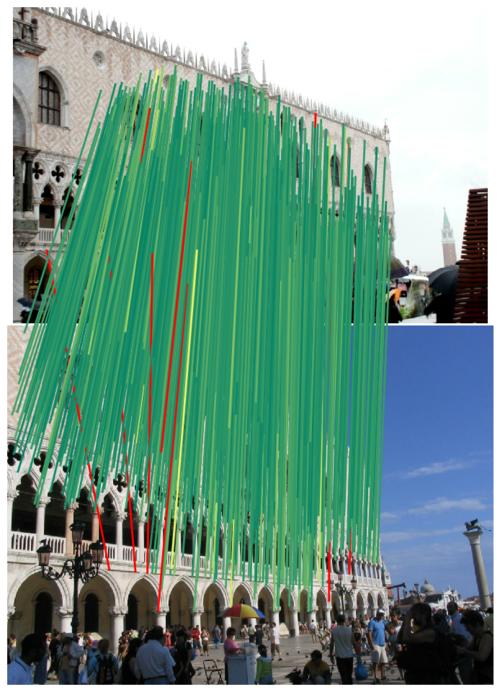
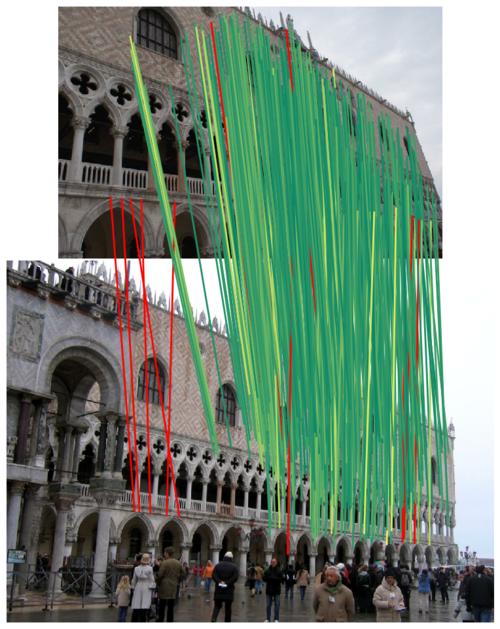
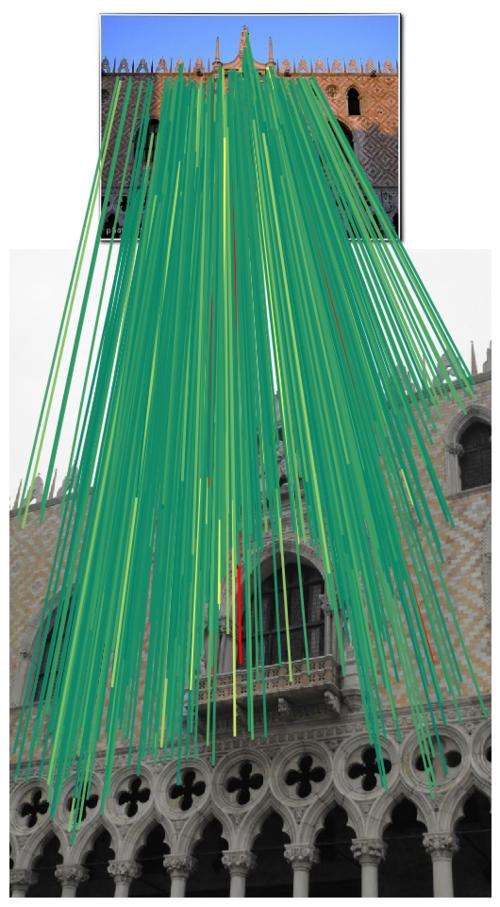
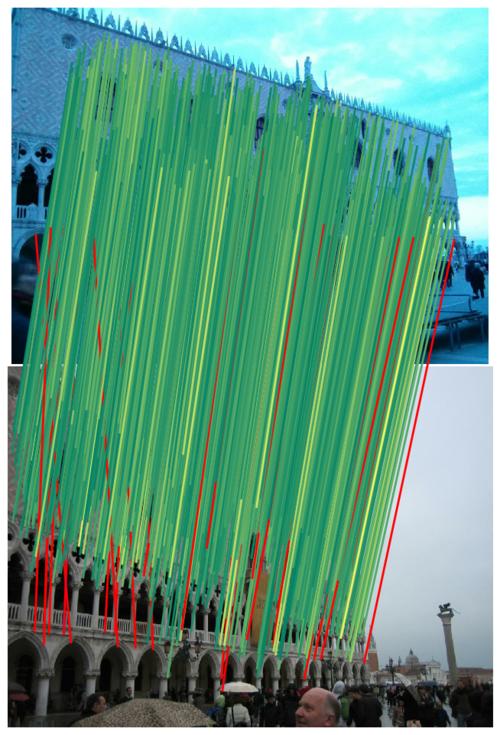
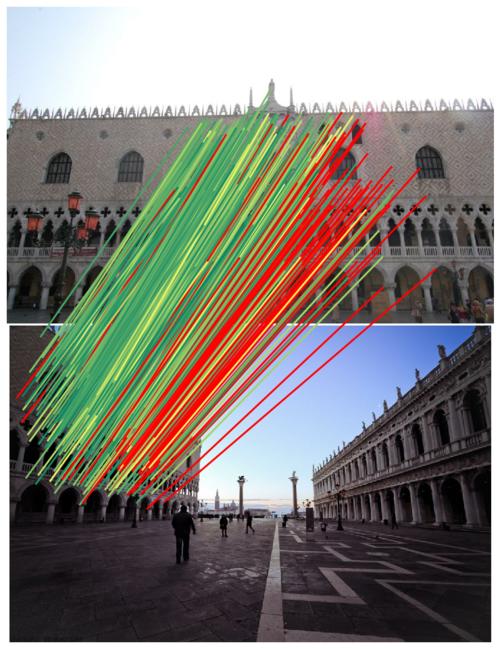
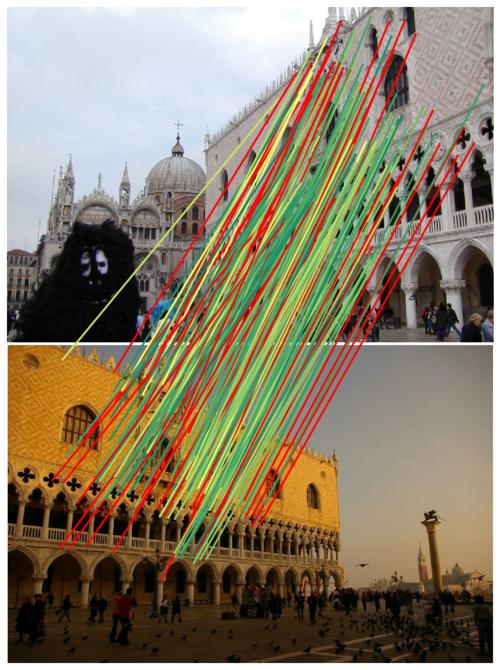
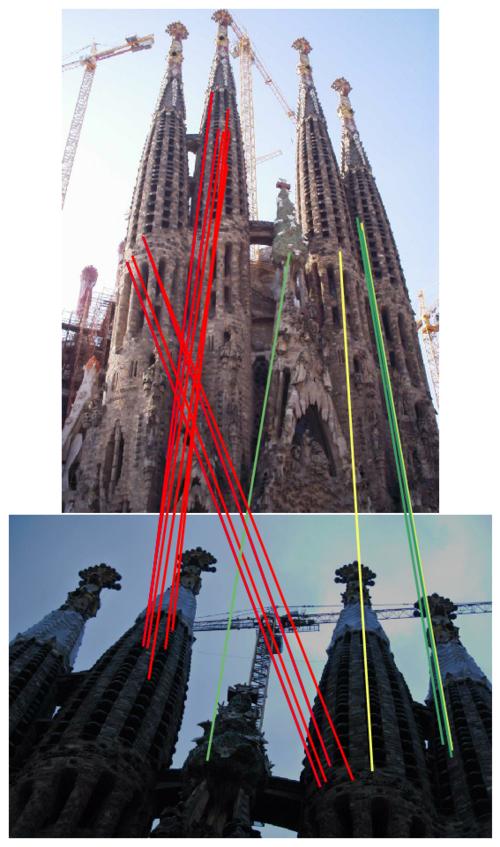
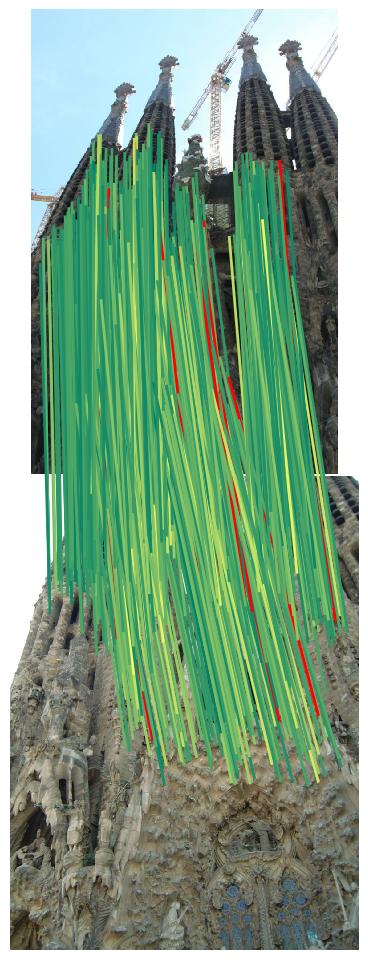
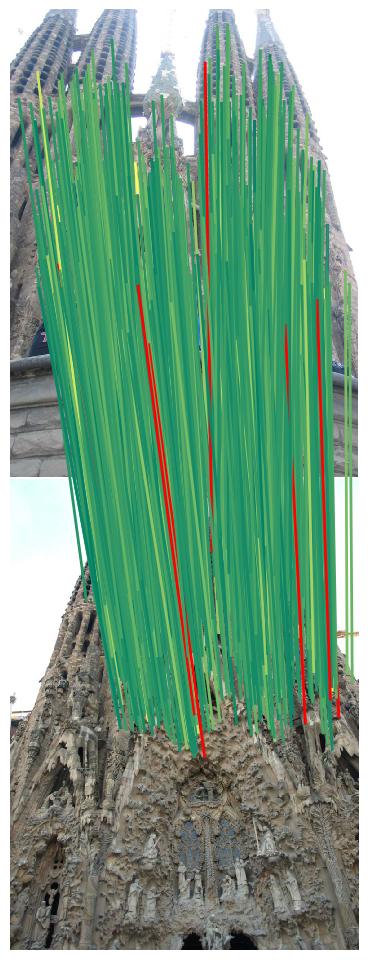
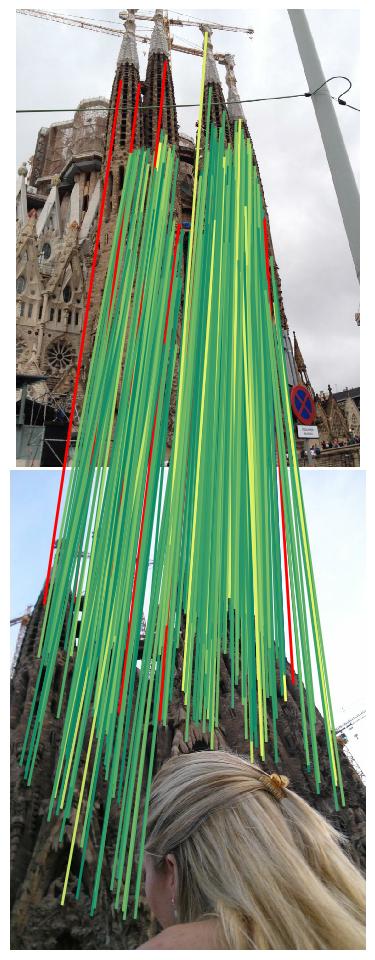
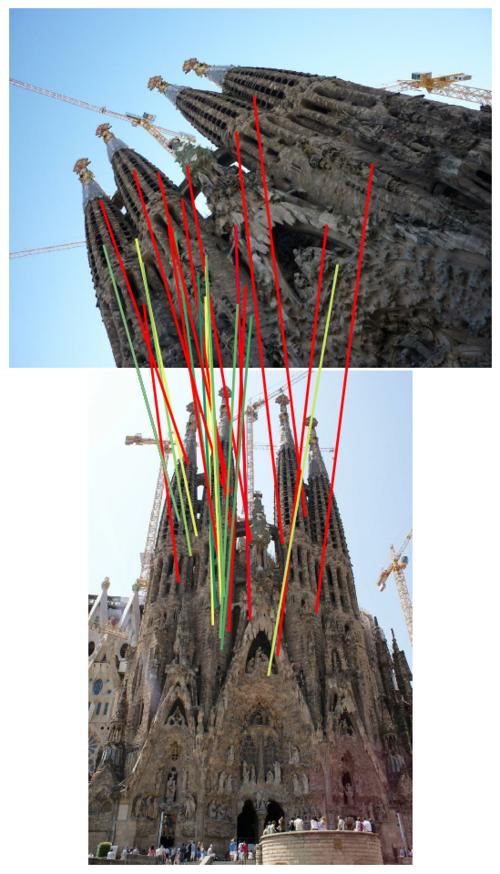
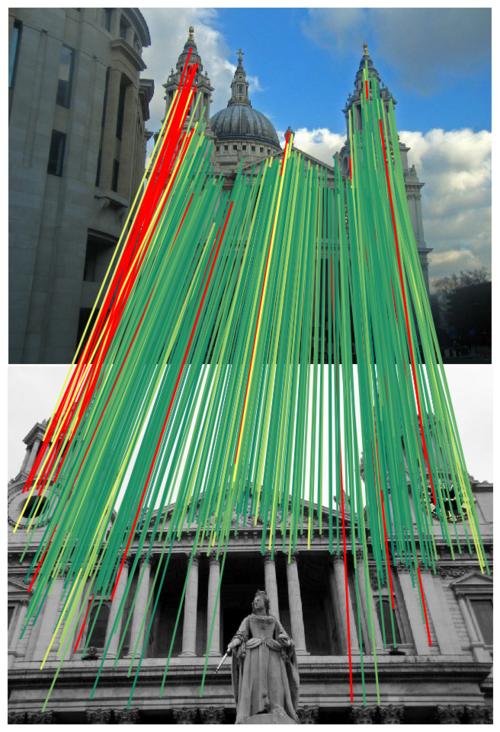
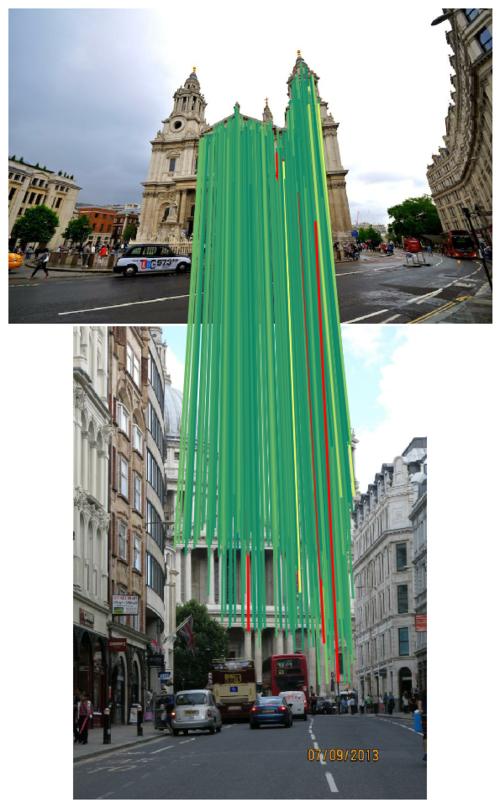
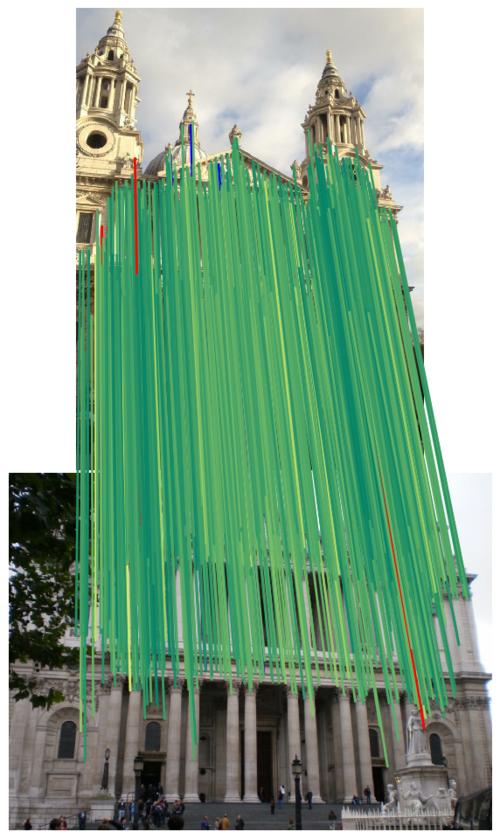
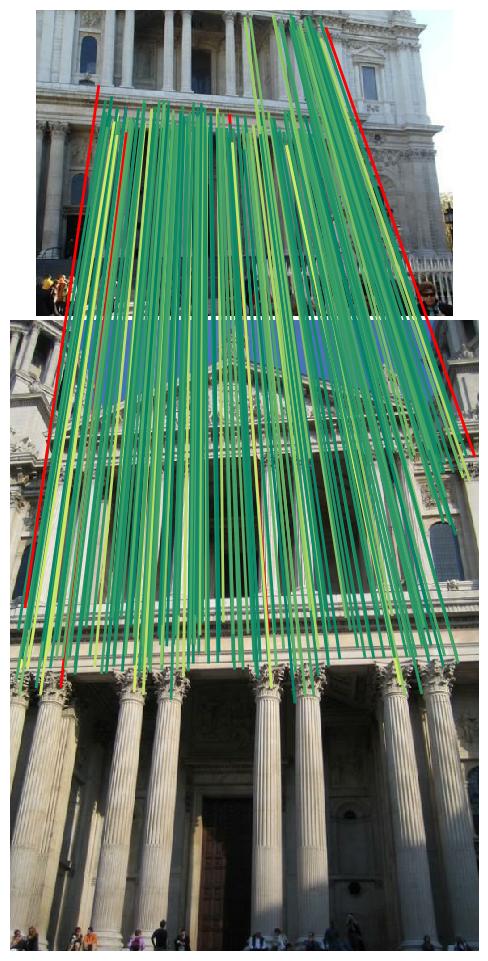
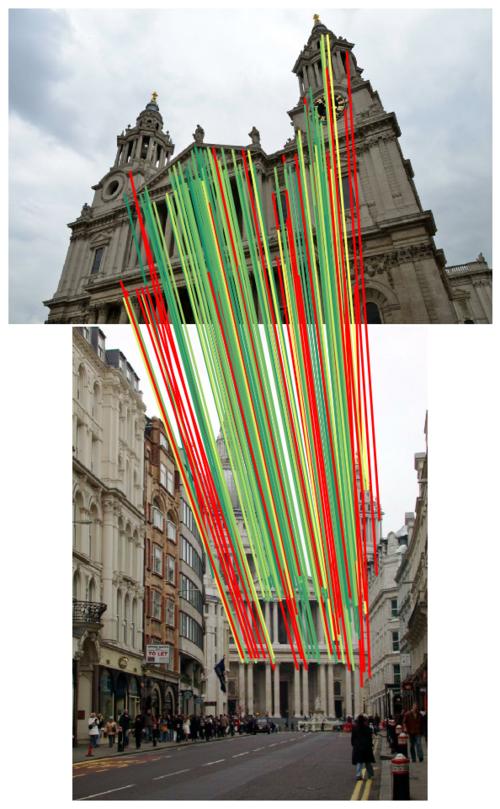
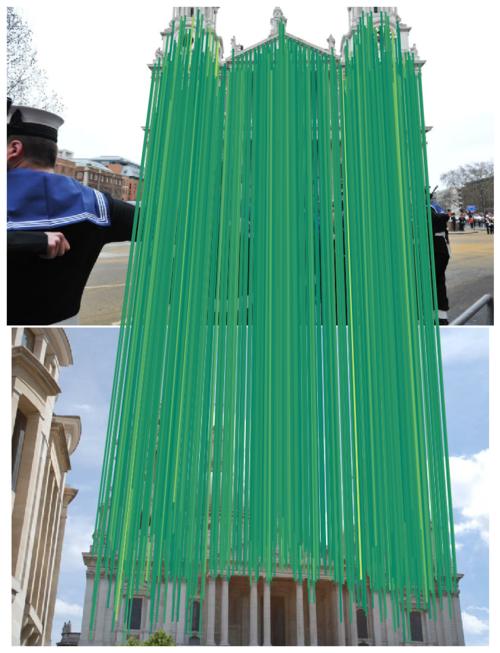
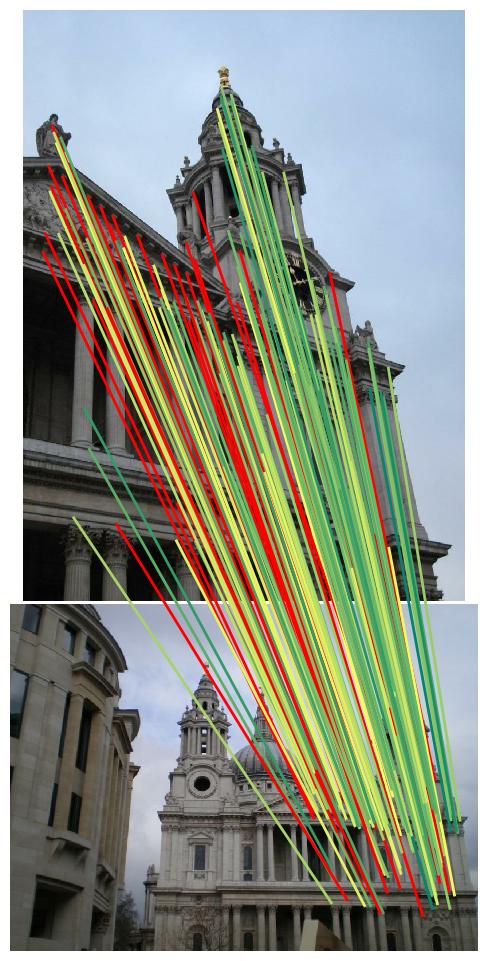
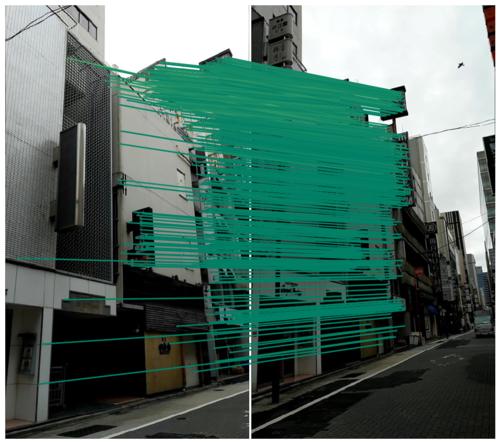
We show the inliers that survive the robust estimation loop (i.e. RANSAC), or those supplied with the submission if using custom matches, and use the depth estimates to determine whether they are correct. We draw matches above a 5-pixel error threshold in red, and those below are color-coded by their error, from 0 (green) to 5 pixels (yellow). Matches for which we do not have depth estimates are drawn in blue. Please note that the depth maps are estimates and may contain errors.
— British Museum —


— Florence Cathedral Side —



— Lincoln Memorial Statue —




— London Bridge —



— Milan Cathedral —
— Mount Rushmore —
— Piazza San Marco —

— Sagrada Familia —


— Saint Paul's Cathedral —


Phototourism dataset / Multiview track
mAA at 10 degrees: N/A (±0.00000 over 1 run(s) / ±0.10485 over 9 scenes)
Rank (per category): 32 (of 87)
| Scene | Features | Matches (input) |
RegistrationRatio (%) | Number of Landmarks |
Track Length | ATE | mAA(50) | mAA(100) |
| BM | 2048.0 | 724.10 | 100.00 Rank: 1/87 |
2406.09 Rank: 4/87 |
6.639 Rank: 8/87 |
0.44792 Rank: 50/87 |
0.48933 (±0.00000) Rank: 50/87 |
0.64807 (±0.00000) Rank: 50/87 |
| FCS | 2048.0 | 525.04 | 98.53 Rank: 10/87 |
2777.17 Rank: 16/87 |
5.355 Rank: 4/87 |
0.23031 Rank: 17/87 |
0.74912 (±0.00000) Rank: 22/87 |
0.80724 (±0.00000) Rank: 20/87 |
| LMS | 2048.0 | 468.35 | 99.73 Rank: 5/87 |
2458.76 Rank: 4/87 |
5.480 Rank: 42/87 |
0.31132 Rank: 55/87 |
0.83154 (±0.00000) Rank: 40/87 |
0.88865 (±0.00000) Rank: 39/87 |
| LB | 2048.0 | 463.53 | 98.36 Rank: 1/87 |
2086.97 Rank: 34/87 |
5.826 Rank: 10/87 |
0.48547 Rank: 32/87 |
0.73810 (±0.00000) Rank: 3/87 |
0.82227 (±0.00000) Rank: 3/87 |
| MC | 2048.0 | 664.87 | 100.00 Rank: 1/87 |
2577.14 Rank: 5/87 |
6.331 Rank: 7/87 |
0.31444 Rank: 3/87 |
0.57370 (±0.00000) Rank: 4/87 |
0.72060 (±0.00000) Rank: 3/87 |
| MR | 2048.0 | 488.56 | 95.40 Rank: 15/87 |
2706.81 Rank: 2/87 |
4.958 Rank: 10/87 |
0.54977 Rank: 52/87 |
0.41867 (±0.00000) Rank: 39/87 |
0.54134 (±0.00000) Rank: 36/87 |
| PSM | 2048.0 | 420.86 | 99.80 Rank: 4/87 |
2900.00 Rank: 6/87 |
4.901 Rank: 3/87 |
0.29498 Rank: 2/87 |
0.66846 (±0.00000) Rank: 3/87 |
0.75314 (±0.00000) Rank: 4/87 |
| SF | 2048.0 | 457.57 | 99.67 Rank: 39/87 |
2865.90 Rank: 20/87 |
5.106 Rank: 7/87 |
0.28631 Rank: 36/87 |
0.77390 (±0.00000) Rank: 35/87 |
0.85774 (±0.00000) Rank: 32/87 |
| SPC | 2048.0 | 561.76 | 100.00 Rank: 1/87 |
2585.22 Rank: 7/87 |
5.954 Rank: 7/87 |
0.50501 Rank: 58/87 |
0.73822 (±0.00000) Rank: 36/87 |
0.82984 (±0.00000) Rank: 37/87 |
| Avg | 2048.0 | 530.52 | 99.05 Rank: 4/87 |
2596.01 Rank: 4/87 |
5.617 Rank: 7/87 |
0.38061 Rank: 39/87 |
0.66456 (±0.00000) Rank: 34/87 |
0.76321 (±0.00000) Rank: 32/87 |
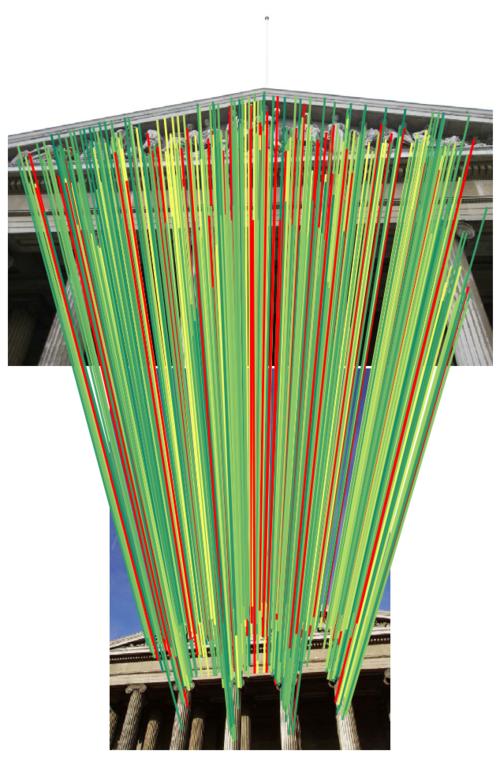
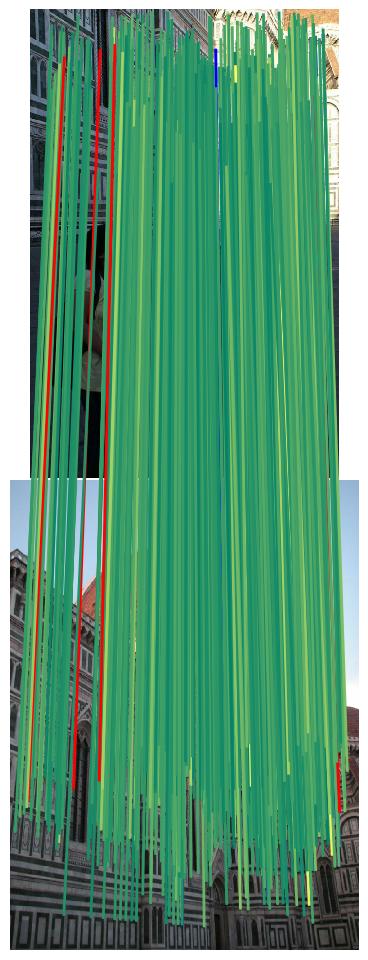
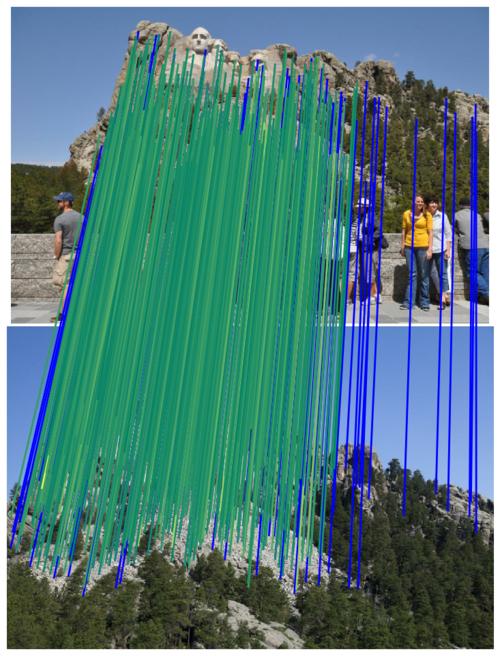
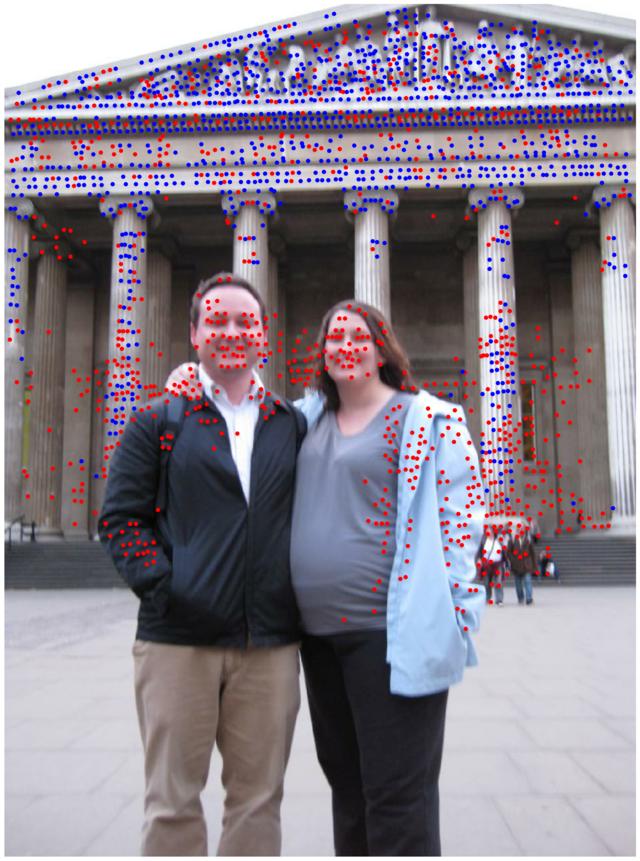
In the multi-view track we reconstruct the scene with Structure-from-Motion (Colmap) with small sets of images. We show the results for one bag of 10 images. Keypoints are drawn in blue if they are part of the model, and in red otherwise.
— British Museum —







— Florence Cathedral Side —








— Lincoln Memorial Statue —




— London Bridge —









— Milan Cathedral —








— Mount Rushmore —



— Piazza San Marco —










— Sagrada Familia —





— Saint Paul's Cathedral —










Prague Parks dataset / Stereo track
mAA at 10 degrees: 0.58918 (±0.00000 over 1 run(s) / ±0.06394 over 3 scenes)
Rank (per category): 47 (of 87)
| Scene | Features | Matches (raw) |
Matches (final) |
Rep. @ 3 px. | MS @ 3 px. | mAA(5o) | mAA(10o) |
| Lizard | 2048.0 | — | 317.0 | 0.036 Rank: 20/87 |
0.015 Rank: 3/87 |
0.37448 (±0.00000) Rank: 51/87 |
0.51137 (±0.00000) Rank: 50/87 |
| Pond | 2048.0 | — | 375.5 | 0.063 Rank: 15/87 |
0.055 Rank: 12/87 |
0.45932 (±0.00000) Rank: 42/87 |
0.58818 (±0.00000) Rank: 44/87 |
| Tree | 2048.0 | — | 260.7 | 0.042 Rank: 14/87 |
0.021 Rank: 53/87 |
0.53554 (±0.00000) Rank: 48/87 |
0.66799 (±0.00000) Rank: 47/87 |
| Avg | 2048.0 | — | 317.7 | 0.047 Rank: 15/87 |
0.030 Rank: 4/87 |
0.45645 (±0.00000) Rank: 48/87 |
0.58918 (±0.00000) Rank: 47/87 |
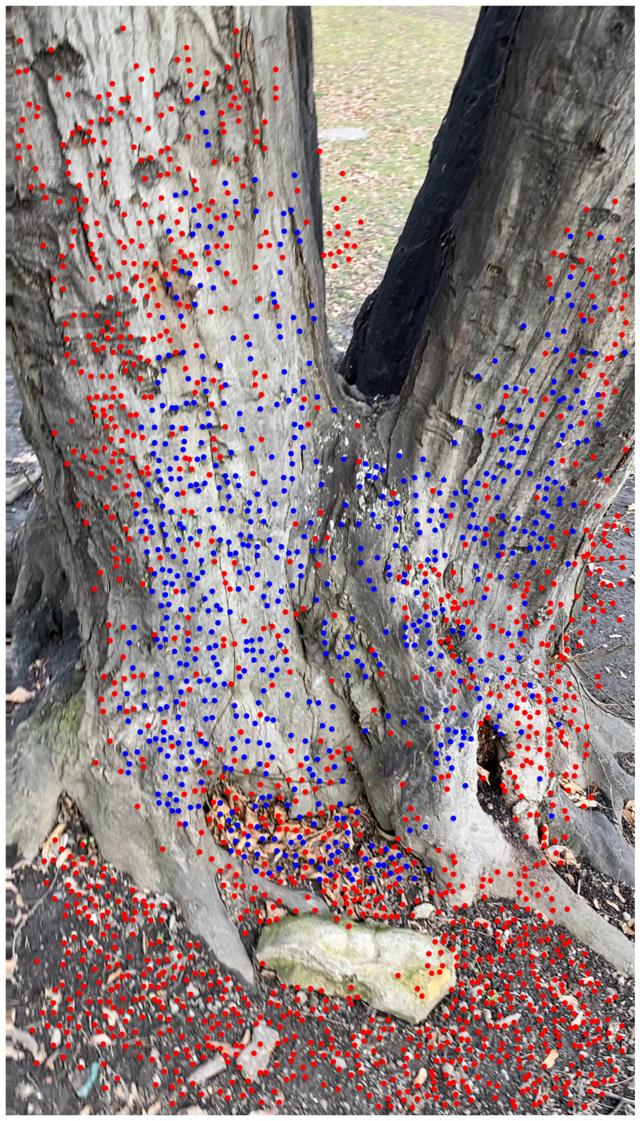
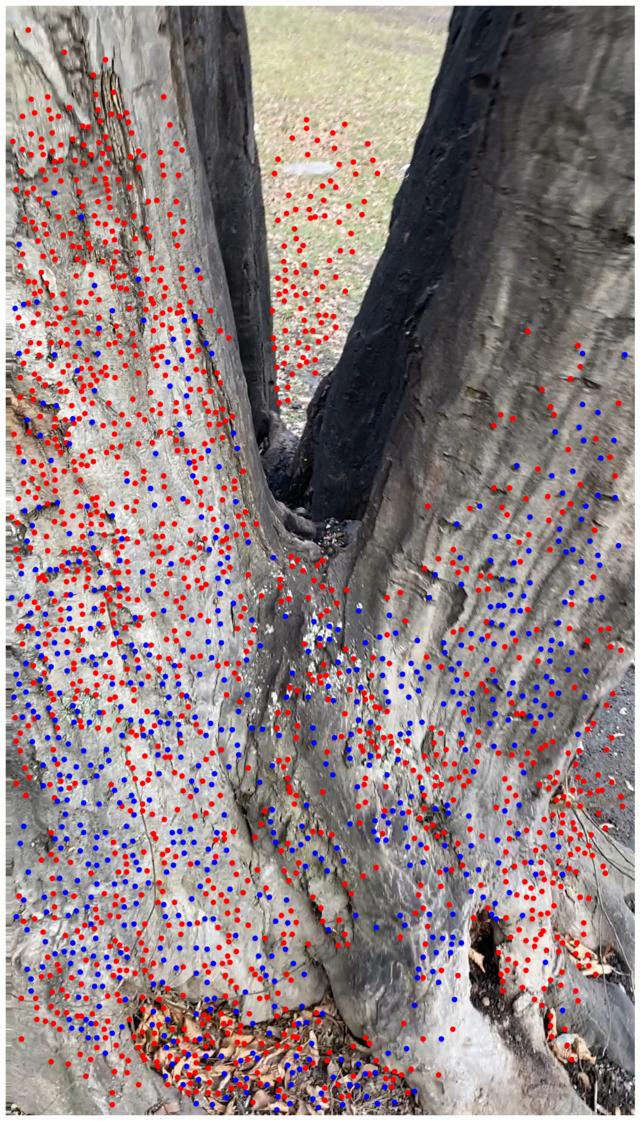
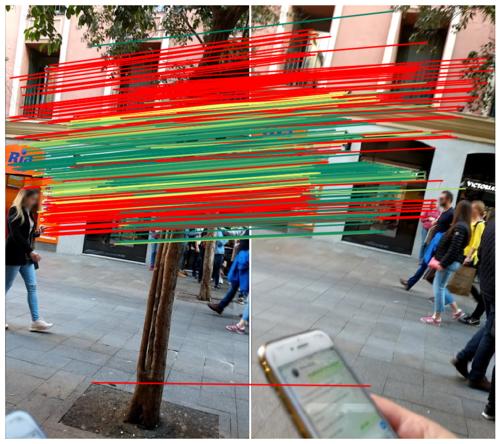
We show the inliers that survive the robust estimation loop (i.e. RANSAC), or those supplied with the submission if using custom matches, and use the depth estimates to determine whether they are correct. We draw matches above a 5-pixel error threshold in red, and those below are color-coded by their error, from 0 (green) to 5 pixels (yellow). Matches for which we do not have depth estimates are drawn in blue. Please note that the depth maps are estimates and may contain errors.
— Lizard —




— Pond —

— Tree —






Prague Parks dataset / Multiview track
mAA at 10 degrees: N/A (±0.00000 over 1 run(s) / ±0.14441 over 3 scenes)
Rank (per category): 43 (of 87)
| Scene | Features | Matches (input) |
RegistrationRatio (%) | Number of Landmarks |
Track Length | ATE | mAA(50) | mAA(100) |
| Lizard | 2048.0 | 370.64 | 85.30 Rank: 19/87 |
1205.40 Rank: 22/87 |
3.417 Rank: 17/87 |
14.29127 Rank: 52/87 |
0.56216 (±0.00000) Rank: 44/87 |
0.64716 (±0.00000) Rank: 46/87 |
| Pond | 2048.0 | 474.09 | 68.93 Rank: 28/87 |
1141.16 Rank: 3/87 |
3.172 Rank: 5/87 |
0.43492 Rank: 49/87 |
0.25453 (±0.00000) Rank: 52/87 |
0.29346 (±0.00000) Rank: 50/87 |
| Tree | 2048.0 | 295.24 | 71.03 Rank: 38/87 |
781.54 Rank: 4/87 |
3.090 Rank: 7/87 |
6.00753 Rank: 35/87 |
0.43180 (±0.00000) Rank: 34/87 |
0.47497 (±0.00000) Rank: 29/87 |
| Avg | 2048.0 | 379.99 | 75.09 Rank: 22/87 |
1042.70 Rank: 4/87 |
3.227 Rank: 3/87 |
6.91124 Rank: 41/87 |
0.41616 (±0.00000) Rank: 45/87 |
0.47186 (±0.00000) Rank: 43/87 |
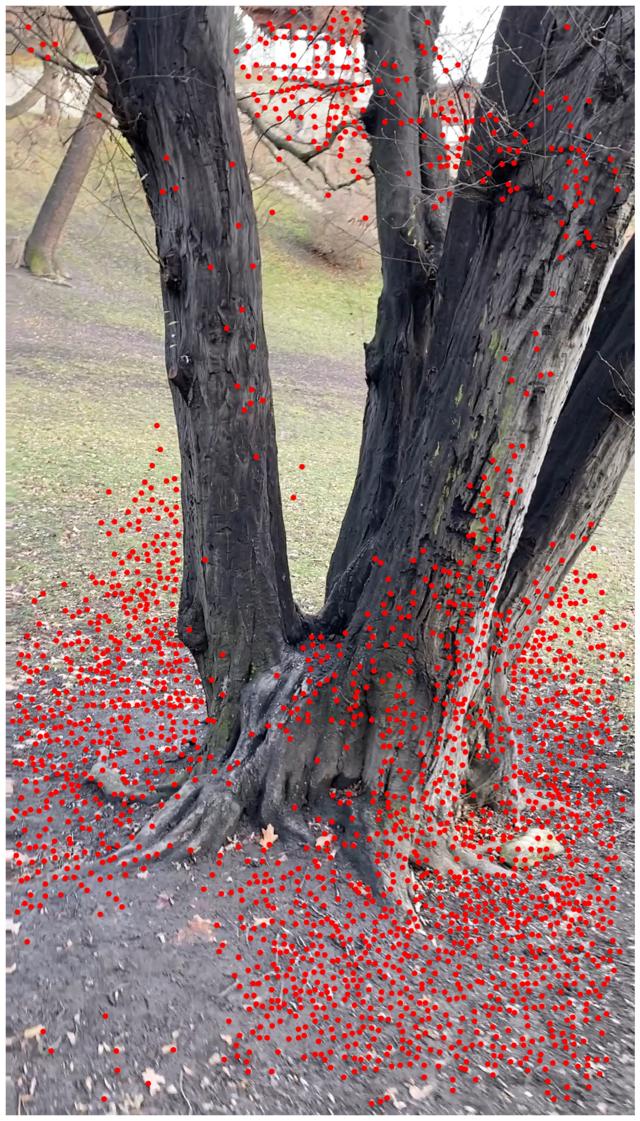
In the multi-view track we reconstruct the scene with Structure-from-Motion (Colmap) with small sets of images. We show the results for one bag of 10 images. Keypoints are drawn in blue if they are part of the model, and in red otherwise.
— Lizard —



— Pond —





— Tree —



Google Urban dataset / Stereo track
mAA at 10 degrees: 0.33564 (±0.00000 over 1 run(s) / ±0.13433 over 17 scenes)
Rank (per category): 38 (of 87)
| Scene | Features | Matches (raw) |
Matches (final) |
mAA(5o) | mAA(10o) |
| Amsterdam (AMS) | 2048.0 | — | 315.4 | 0.22411 (±0.00000) Rank: 32/87 |
0.36830 (±0.00000) Rank: 31/87 |
| Bangkok (BGK) | 2048.0 | — | 386.6 | 0.06352 (±0.00000) Rank: 21/87 |
0.17593 (±0.00000) Rank: 22/87 |
| Barcelona (BCN) | 2048.0 | — | 180.3 | 0.09524 (±0.00000) Rank: 38/87 |
0.16007 (±0.00000) Rank: 42/87 |
| Buenos Aires (BAR) | 2048.0 | — | 233.8 | 0.21096 (±0.00000) Rank: 32/87 |
0.34840 (±0.00000) Rank: 36/87 |
| Cambridge (CAM) | 2048.0 | — | 296.1 | 0.32808 (±0.00000) Rank: 32/87 |
0.46849 (±0.00000) Rank: 14/87 |
| Cannes (CAN) | 2048.0 | — | 319.3 | 0.38894 (±0.00000) Rank: 31/87 |
0.48756 (±0.00000) Rank: 34/87 |
| Chicago (CHI) | 2048.0 | — | 64.1 | 0.09044 (±0.00000) Rank: 42/87 |
0.14911 (±0.00000) Rank: 44/87 |
| Helsinki (HEL) | 2048.0 | — | 477.3 | 0.37629 (±0.00000) Rank: 24/87 |
0.57010 (±0.00000) Rank: 29/87 |
| Madrid (MAD) | 2048.0 | — | 168.8 | 0.06322 (±0.00000) Rank: 40/87 |
0.15836 (±0.00000) Rank: 39/87 |
| Mountain View (MTV) | 2048.0 | — | 168.4 | 0.16328 (±0.00000) Rank: 38/87 |
0.28828 (±0.00000) Rank: 38/87 |
| New Orleans (NOR) | 2048.0 | — | 160.5 | 0.23373 (±0.00000) Rank: 34/87 |
0.31331 (±0.00000) Rank: 36/87 |
| San Francisco (SF) | 2048.0 | — | 253.7 | 0.17008 (±0.00000) Rank: 36/87 |
0.29528 (±0.00000) Rank: 37/87 |
| Singapore (SG) | 2048.0 | — | 228.8 | 0.22658 (±0.00000) Rank: 41/87 |
0.33639 (±0.00000) Rank: 41/87 |
| Sydney (SYD) | 2048.0 | — | 195.2 | 0.27511 (±0.00000) Rank: 36/87 |
0.41441 (±0.00000) Rank: 37/87 |
| Tokyo (TOK) | 2048.0 | — | 260.9 | 0.46029 (±0.00000) Rank: 42/87 |
0.59951 (±0.00000) Rank: 42/87 |
| Toronto (TOR) | 2048.0 | — | 121.8 | 0.12080 (±0.00000) Rank: 45/87 |
0.25320 (±0.00000) Rank: 43/87 |
| Zurich (ZRH) | 2048.0 | — | 245.3 | 0.23574 (±0.00000) Rank: 32/87 |
0.31924 (±0.00000) Rank: 36/87 |
| Average (Avg) | 2048.0 | — | 239.8 | 0.21920 (±0.00000) Rank: 36/87 |
0.33564 (±0.00000) Rank: 38/87 |
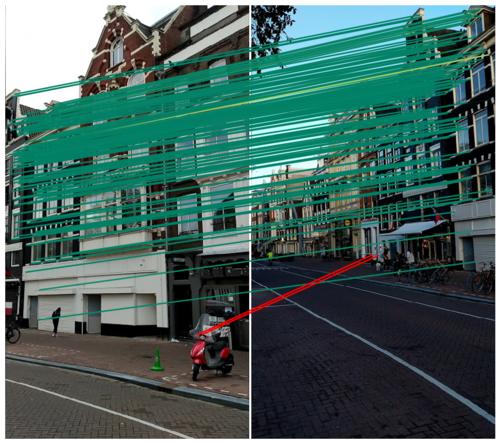
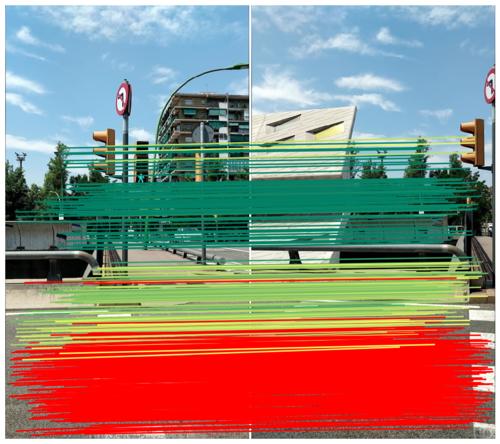
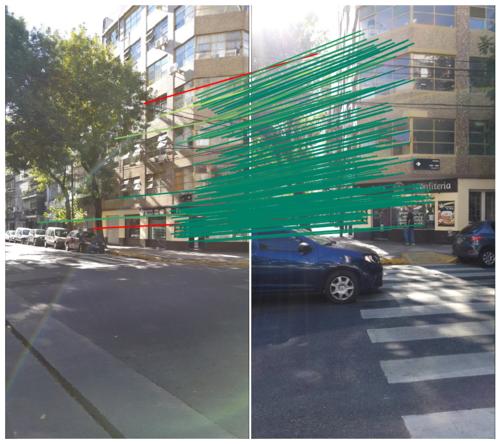
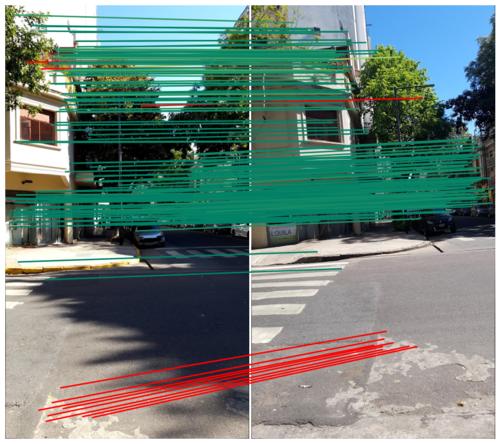
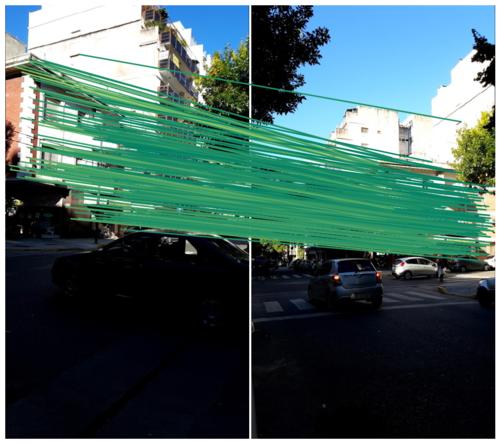
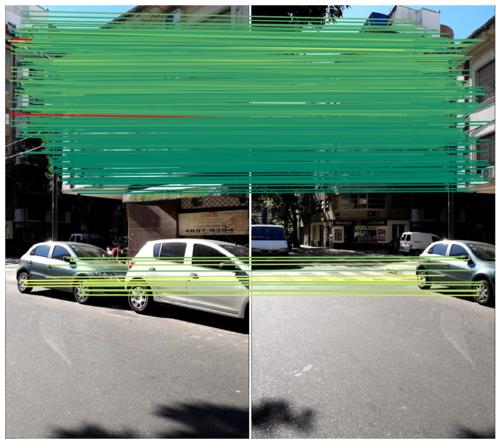
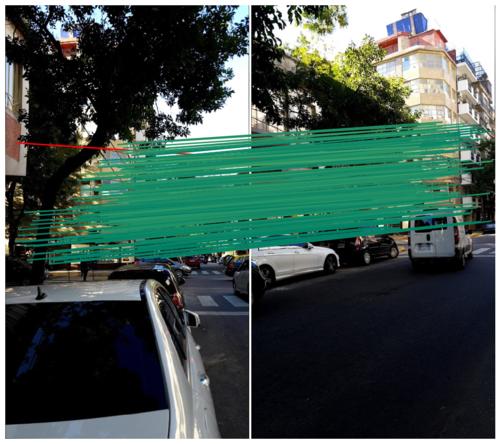
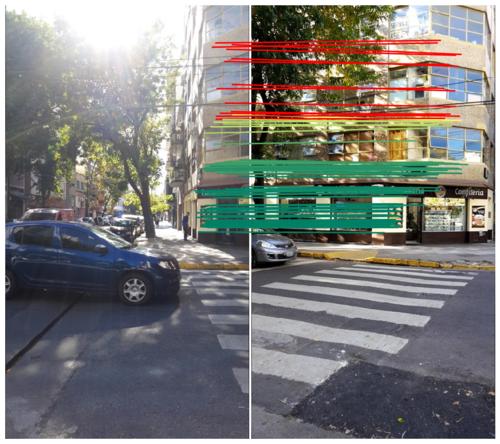
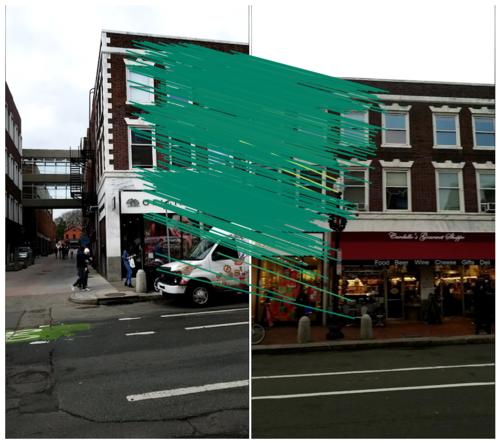
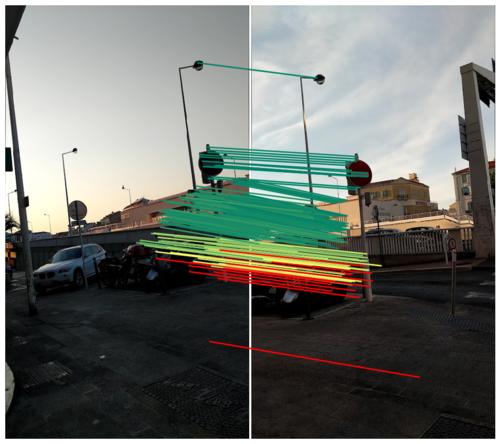
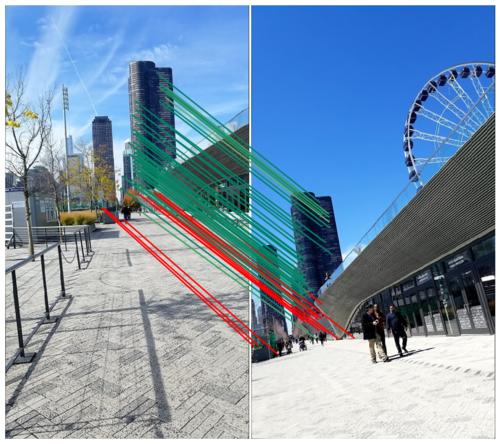
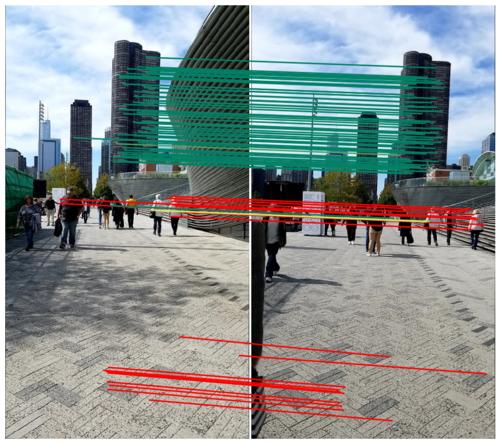
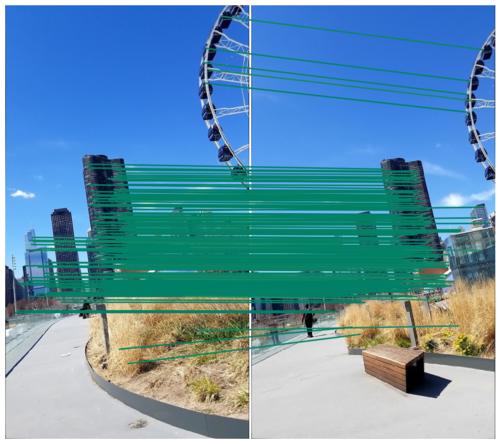
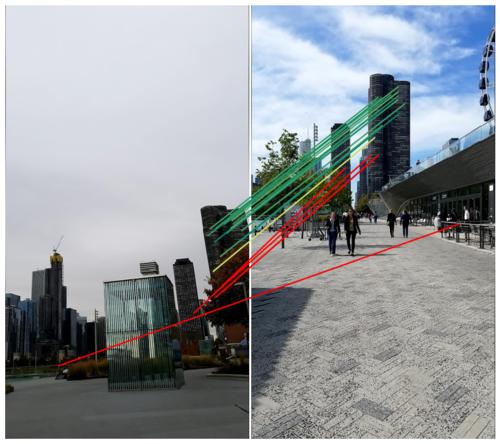
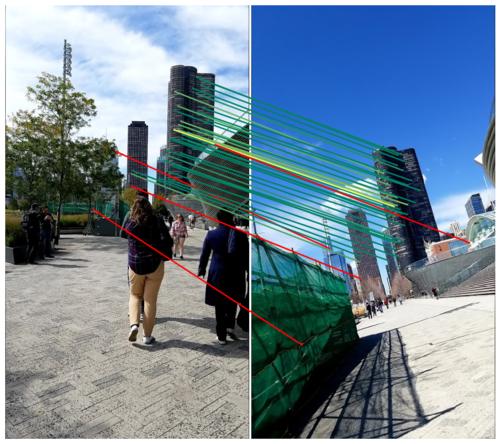
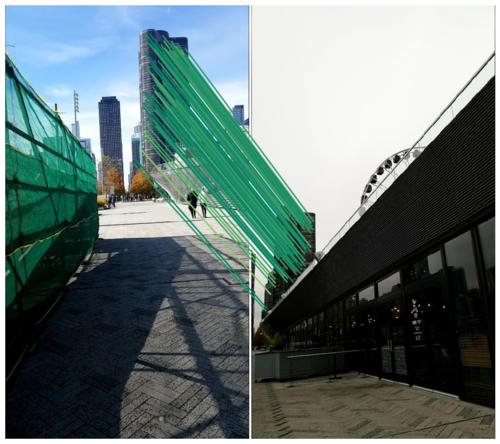
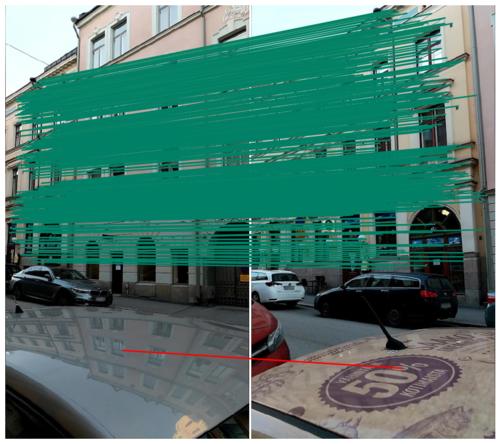
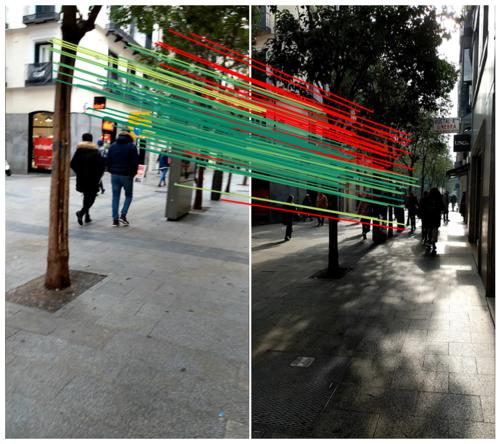
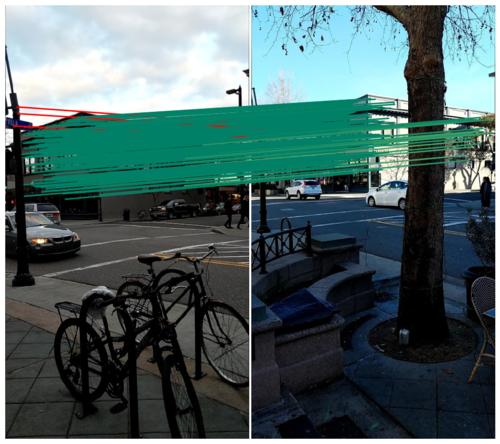
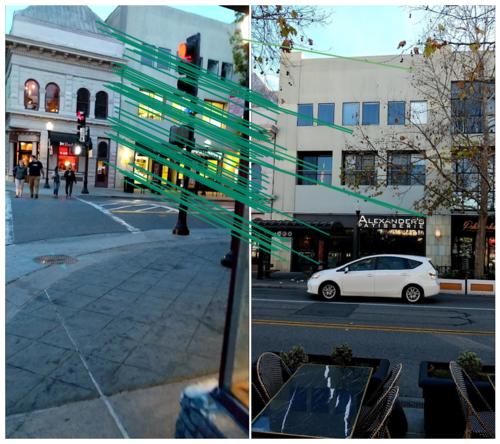
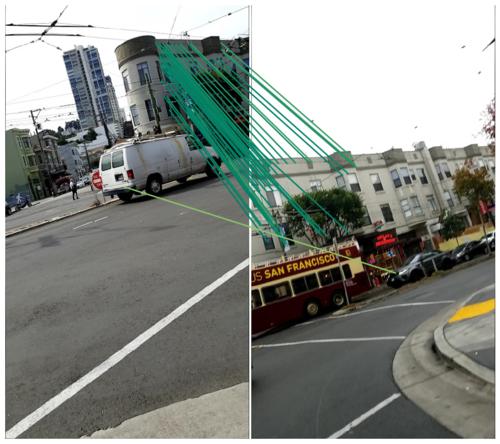
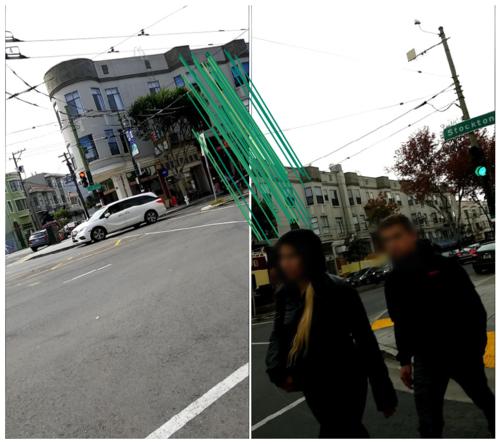
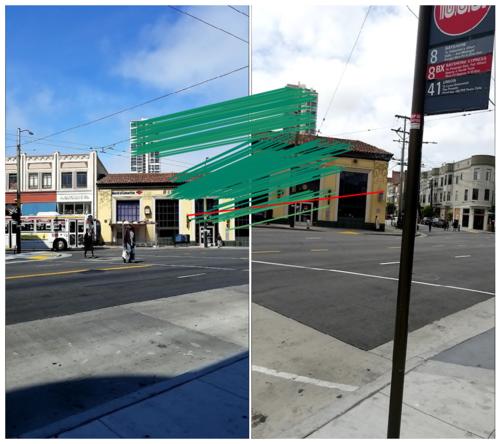
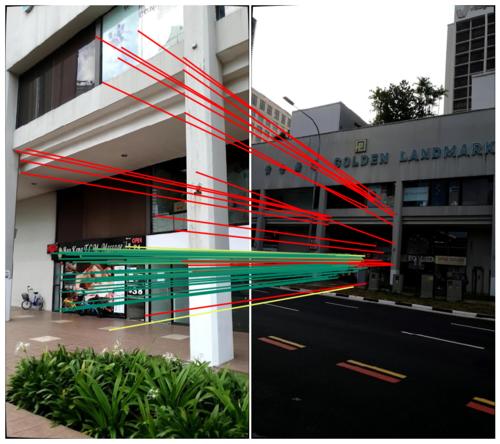
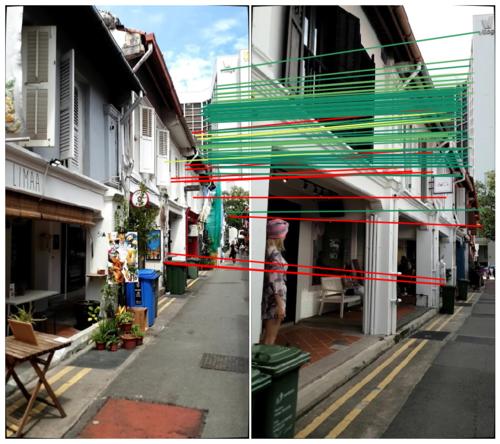
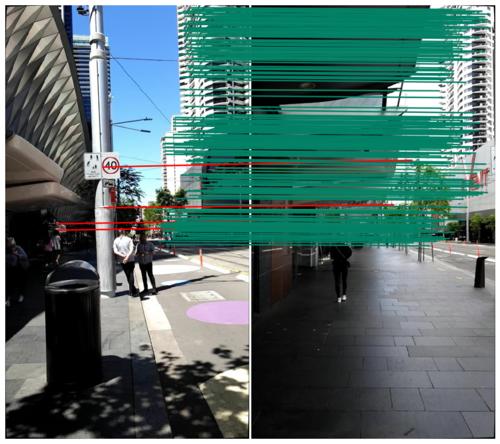
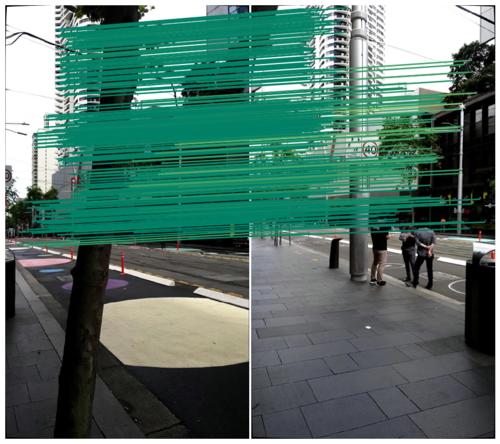
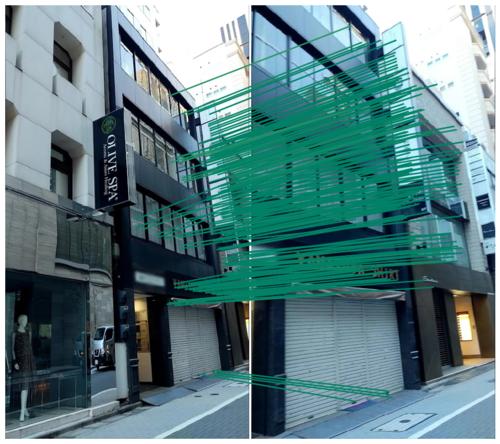
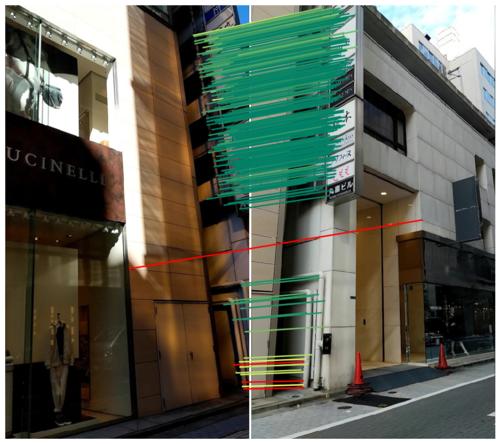
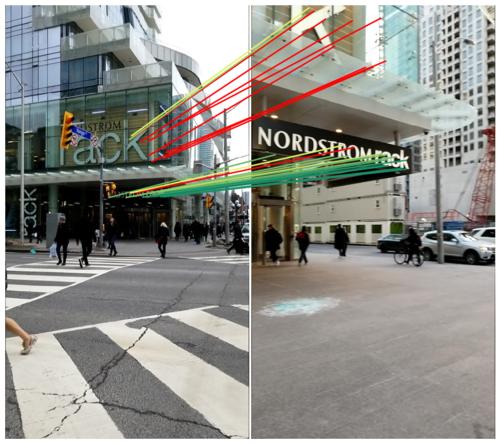
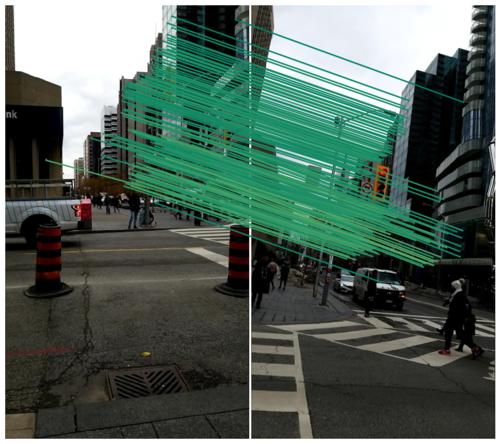
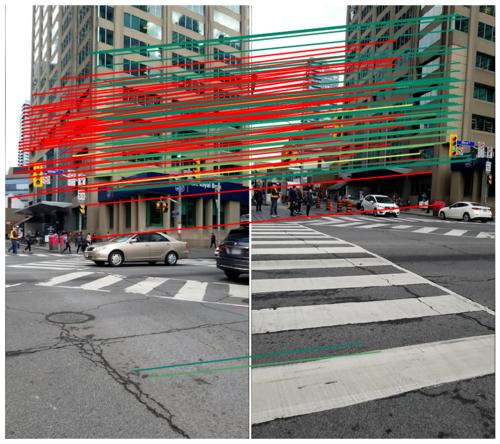
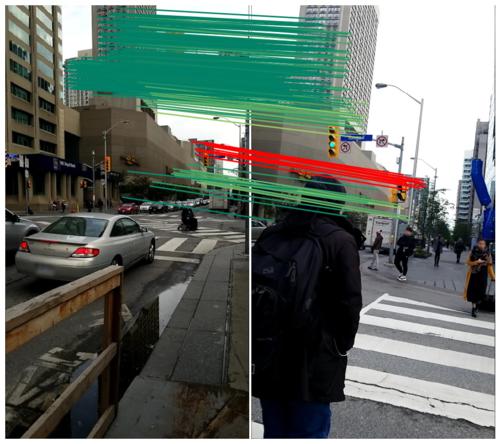
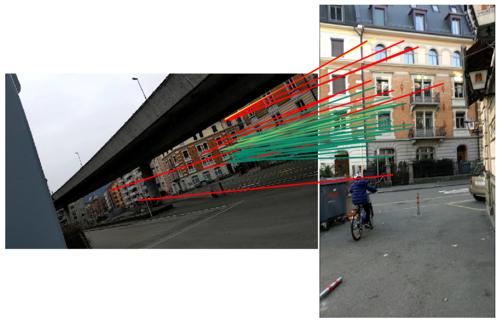
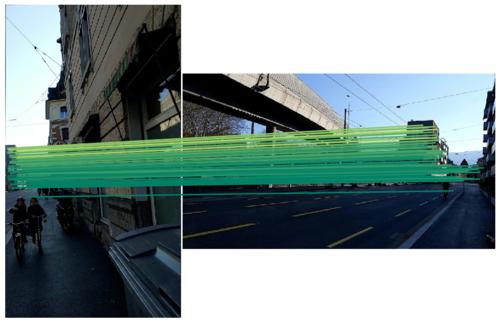
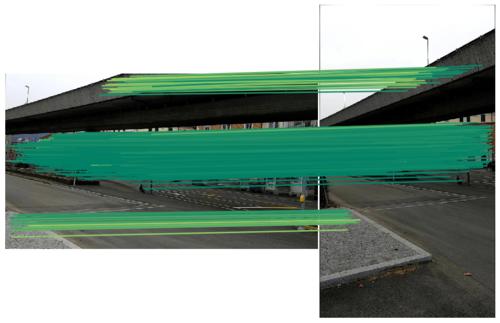
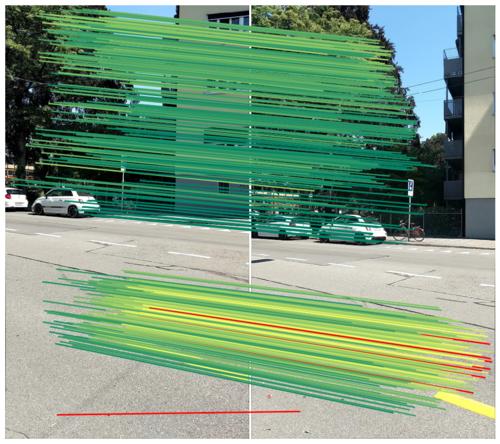
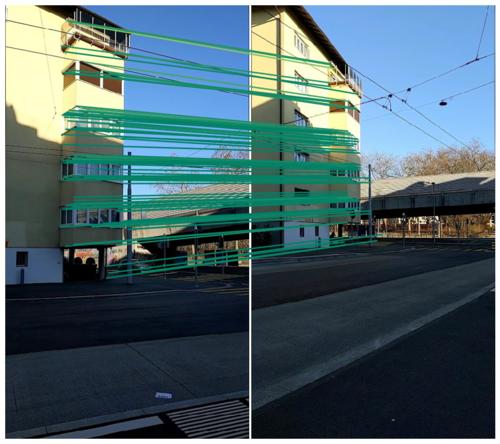
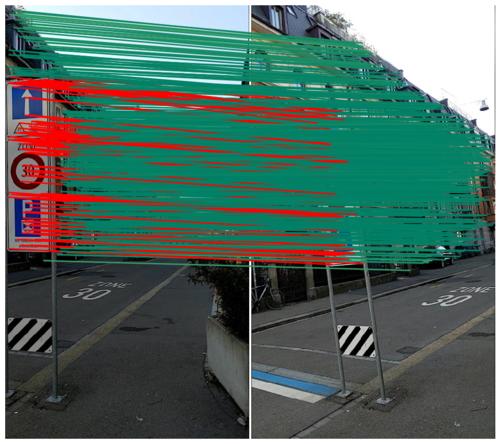
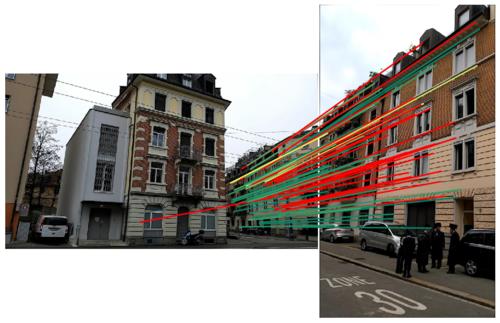
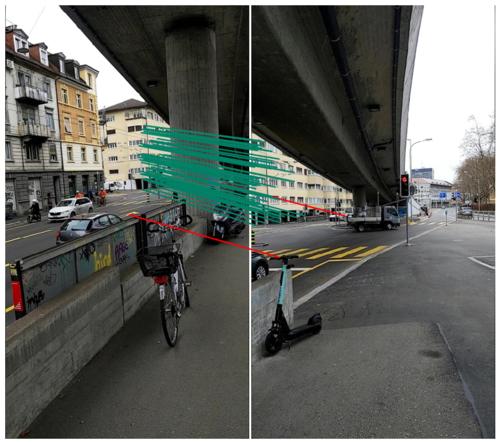
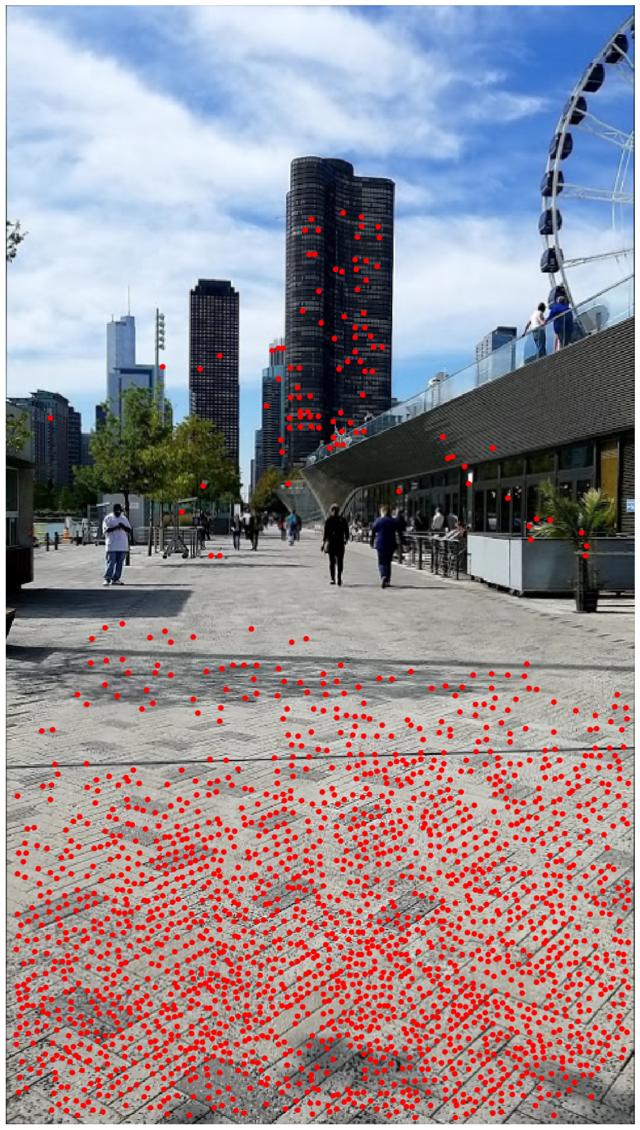
We show the inliers that survive the robust estimation loop (i.e. RANSAC), or those supplied with the submission if using custom matches. As the dataset does not contain depth, we color them based on the symmetric epopilar distance on normalized coordinates: from 0 (green) to 2e-4 (yellow), and in red above it. Note that these occasionally contain false positives.
— Amsterdam —







— Bangkok —





— Barcelona —








— Buenos Aires —




— Cambridge —








— Cannes —






— Chicago —




— Helsinki —

— Madrid —




— Mountain View —





— New Orleans —






— San Francisco —






— Singapore —








— Sydney —








— Tokyo —







— Toronto —






— Zurich —


Google Urban dataset / Multiview track
mAA at 10 degrees: N/A (±0.00000 over 1 run(s) / ±0.12977 over 17 scenes)
Rank (per category): 40 (of 87)
| Scene | Features | Matches (input) |
RegistrationRatio (%) | Number of Landmarks |
Track Length | ATE | mAA(50) | mAA(100) |
| AMS | 2048.0 | 197.06 | 85.91 Rank: 40/87 |
1586.35 Rank: 4/87 |
3.881 Rank: 6/87 |
23.49138 Rank: 14/87 |
0.30821 (±0.00000) Rank: 37/87 |
0.39498 (±0.00000) Rank: 38/87 |
| BGK | 2048.0 | 264.99 | 96.40 Rank: 29/87 |
2480.86 Rank: 19/87 |
3.770 Rank: 6/87 |
11.56650 Rank: 9/87 |
0.02546 (±0.00000) Rank: 31/87 |
0.08326 (±0.00000) Rank: 30/87 |
| BCN | 2048.0 | 109.40 | 79.37 Rank: 41/87 |
808.24 Rank: 32/87 |
3.554 Rank: 41/87 |
25.70295 Rank: 20/87 |
0.12033 (±0.00000) Rank: 34/87 |
0.19229 (±0.00000) Rank: 34/87 |
| BAR | 2048.0 | 135.27 | 81.99 Rank: 36/87 |
1188.29 Rank: 28/87 |
3.312 Rank: 37/87 |
14.64632 Rank: 14/87 |
0.16459 (±0.00000) Rank: 19/87 |
0.27007 (±0.00000) Rank: 23/87 |
| CAM | 2048.0 | 179.41 | 89.06 Rank: 12/87 |
1610.25 Rank: 1/87 |
3.560 Rank: 18/87 |
26.75835 Rank: 28/87 |
0.19105 (±0.00000) Rank: 15/87 |
0.28345 (±0.00000) Rank: 15/87 |
| CAN | 2048.0 | 176.31 | 76.28 Rank: 29/87 |
831.37 Rank: 28/87 |
3.547 Rank: 18/87 |
19.22556 Rank: 27/87 |
0.04772 (±0.00000) Rank: 36/87 |
0.09467 (±0.00000) Rank: 35/87 |
| CHI | 2048.0 | 55.72 | 75.01 Rank: 43/87 |
354.38 Rank: 35/87 |
3.864 Rank: 44/87 |
49.51692 Rank: 52/87 |
0.04839 (±0.00000) Rank: 39/87 |
0.09439 (±0.00000) Rank: 41/87 |
| HEL | 2048.0 | 340.18 | 94.60 Rank: 17/87 |
2441.46 Rank: 8/87 |
3.999 Rank: 29/87 |
13.65311 Rank: 20/87 |
0.29246 (±0.00000) Rank: 38/87 |
0.42217 (±0.00000) Rank: 37/87 |
| MAD | 2048.0 | 104.74 | 87.35 Rank: 40/87 |
1119.06 Rank: 33/87 |
3.292 Rank: 21/87 |
4.56129 Rank: 12/87 |
0.03912 (±0.00000) Rank: 43/87 |
0.10174 (±0.00000) Rank: 43/87 |
| MTV | 2048.0 | 126.53 | 88.34 Rank: 40/87 |
1096.74 Rank: 32/87 |
3.760 Rank: 38/87 |
14.95731 Rank: 10/87 |
0.15973 (±0.00000) Rank: 42/87 |
0.26196 (±0.00000) Rank: 42/87 |
| NOR | 2048.0 | 105.57 | 75.58 Rank: 39/87 |
860.38 Rank: 31/87 |
3.131 Rank: 42/87 |
11.68458 Rank: 22/87 |
0.14288 (±0.00000) Rank: 38/87 |
0.20607 (±0.00000) Rank: 38/87 |
| SF | 2048.0 | 158.36 | 89.36 Rank: 41/87 |
1359.37 Rank: 30/87 |
3.705 Rank: 25/87 |
16.33568 Rank: 13/87 |
0.18266 (±0.00000) Rank: 39/87 |
0.30074 (±0.00000) Rank: 39/87 |
| SG | 2048.0 | 141.24 | 69.38 Rank: 42/87 |
844.53 Rank: 31/87 |
3.414 Rank: 13/87 |
15.19874 Rank: 12/87 |
0.10236 (±0.00000) Rank: 43/87 |
0.15358 (±0.00000) Rank: 42/87 |
| SYD | 2048.0 | 119.52 | 80.81 Rank: 41/87 |
951.04 Rank: 37/87 |
3.336 Rank: 38/87 |
20.28132 Rank: 26/87 |
0.23330 (±0.00000) Rank: 37/87 |
0.31881 (±0.00000) Rank: 37/87 |
| TOK | 2048.0 | 164.26 | 85.57 Rank: 43/87 |
1606.38 Rank: 33/87 |
3.703 Rank: 30/87 |
12.42759 Rank: 12/87 |
0.46110 (±0.00000) Rank: 45/87 |
0.53102 (±0.00000) Rank: 45/87 |
| TOR | 2048.0 | 76.88 | 75.22 Rank: 43/87 |
696.32 Rank: 42/87 |
3.158 Rank: 39/87 |
12.33538 Rank: 11/87 |
0.07199 (±0.00000) Rank: 43/87 |
0.14103 (±0.00000) Rank: 43/87 |
| ZRH | 2048.0 | 150.27 | 78.55 Rank: 42/87 |
1153.00 Rank: 34/87 |
3.470 Rank: 21/87 |
15.10363 Rank: 12/87 |
0.03604 (±0.00000) Rank: 44/87 |
0.07926 (±0.00000) Rank: 43/87 |
| Avg | 2048.0 | 153.28 | 82.87 Rank: 40/87 |
1234.59 Rank: 31/87 |
3.556 Rank: 34/87 |
18.08509 Rank: 15/87 |
0.15455 (±0.00000) Rank: 40/87 |
0.23115 (±0.00000) Rank: 40/87 |
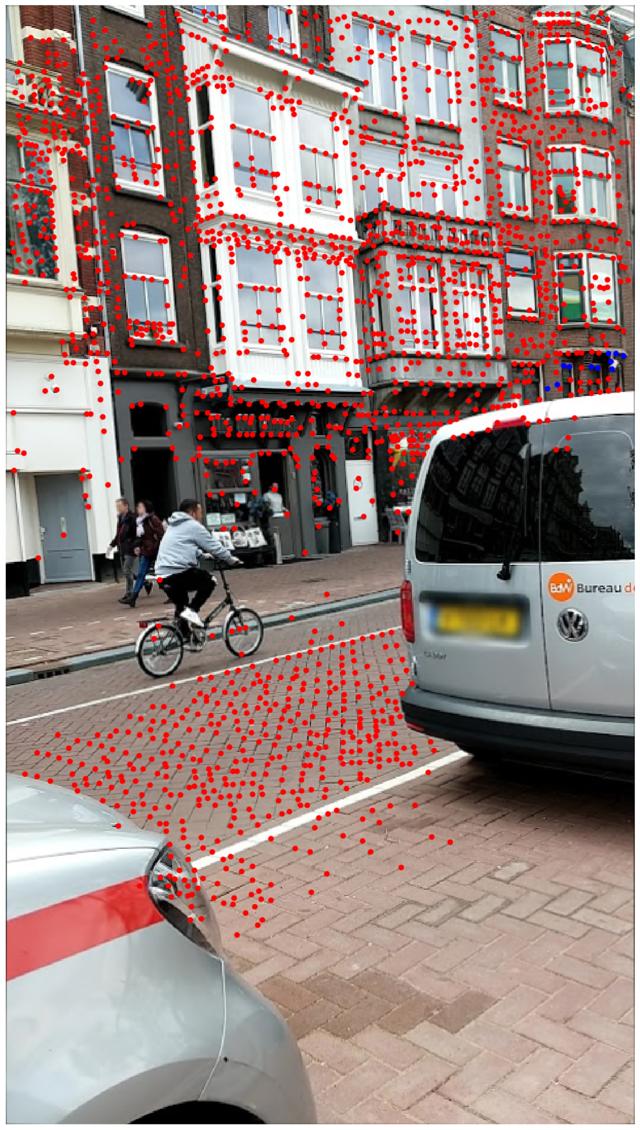
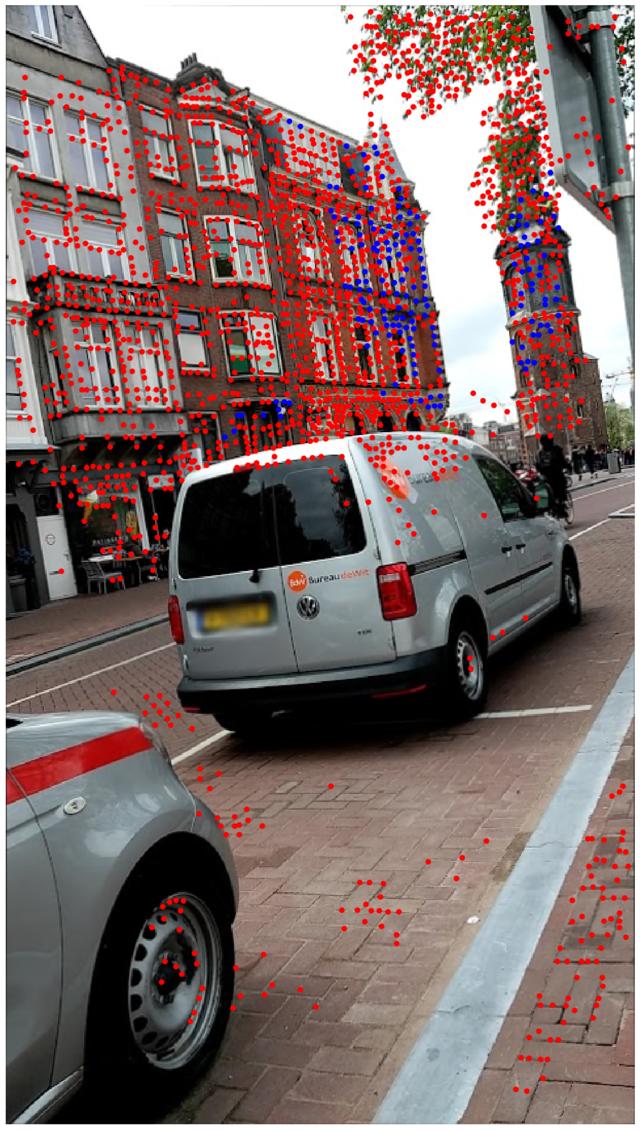
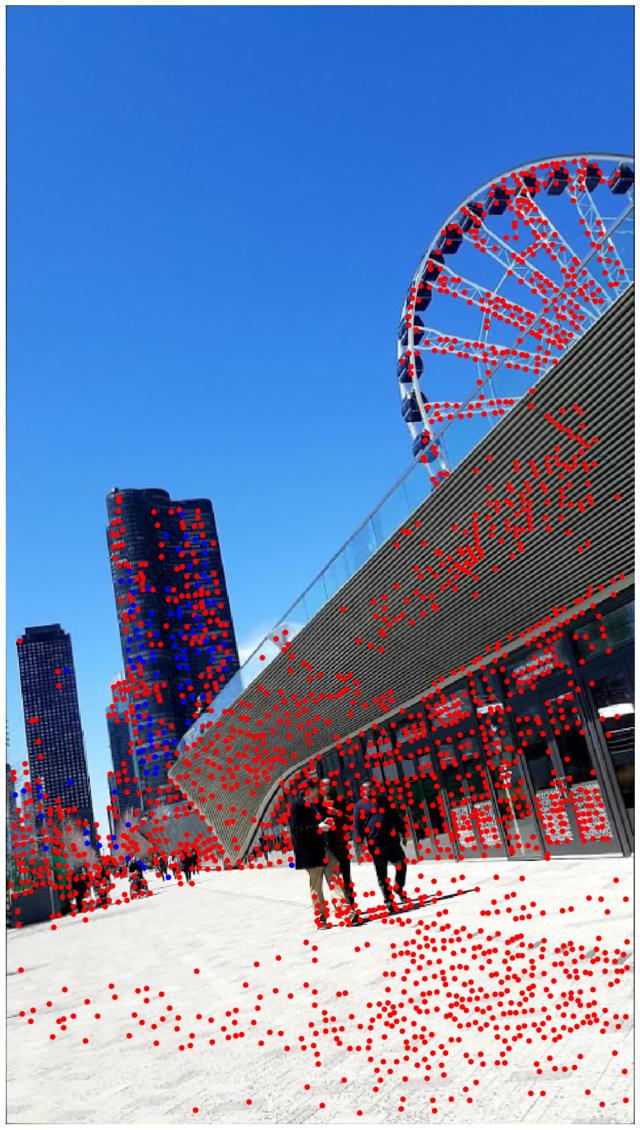
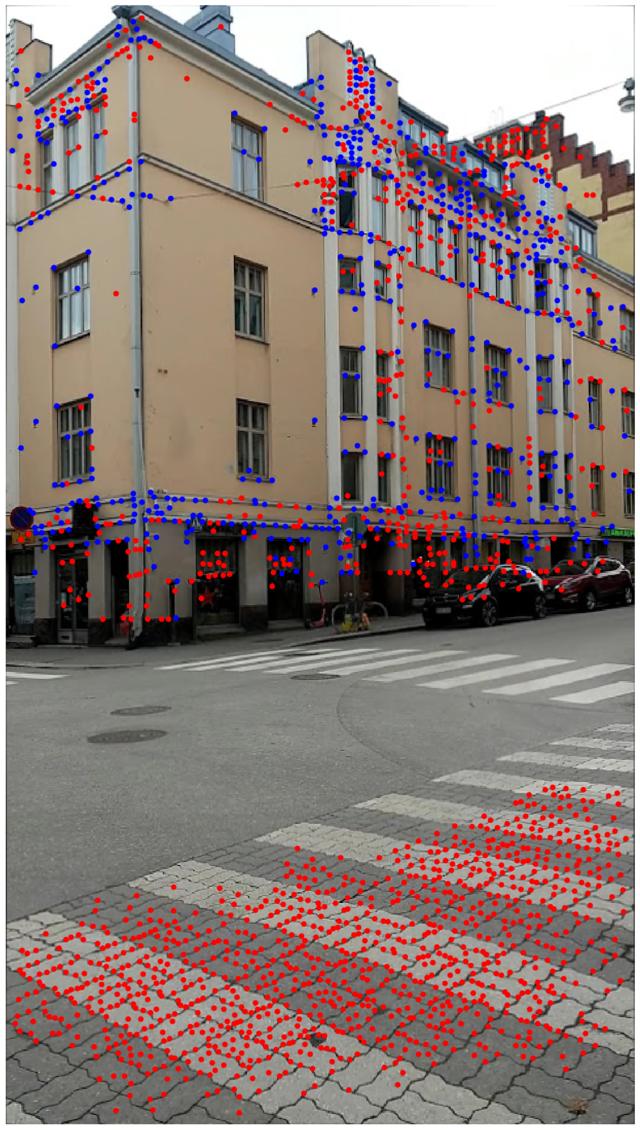
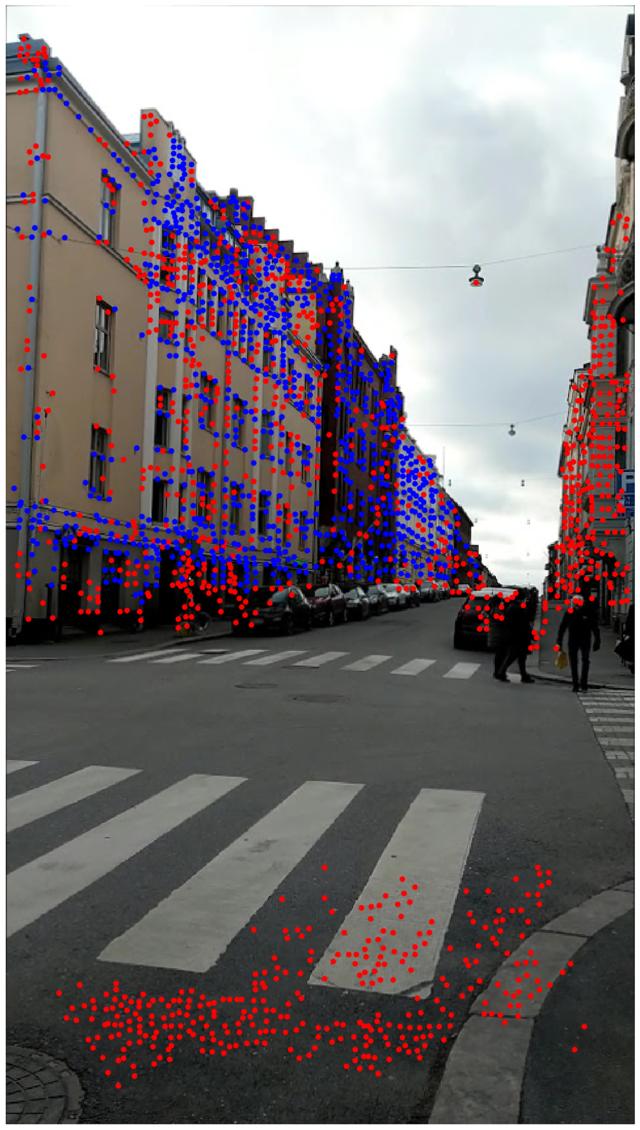
In the multi-view track we reconstruct the scene with Structure-from-Motion (Colmap) with small sets of images. We show the results for one bag of 10 images. Keypoints are drawn in blue if they are part of the model, and in red otherwise.
— Amsterdam —



— Bangkok —


— Barcelona —


— Buenos Aires —



— Cambridge —


— Cannes —

— Chicago —

— Helsinki —



— Madrid —



— Mountain View —


— New Orleans —





— San Francisco —



— Singapore —




— Sydney —


— Tokyo —
— Toronto —



— Zurich —