Submission ID: f1233aa3
sp_ada(urban)_degeree_resize_womask
Processed: 21-06-23. Download link: f1233aa3e6f77462-degree.json
This page ranks the submission against all others using the same number of keypoints, regardless of descriptor size. Please hover over table headers for descriptions on metrics and full scene names.
- Phototourism dataset: Stereo track / Multiview track
- Prague Parks dataset: Stereo track / Multiview track
- Google Urban dataset: Stereo track / Multiview track
Metadata
- Authors: Anonymous (to be released: 2021-6-18)
- Keypoint: sp
- Descriptor: sp (256 float32: 1024 bytes)
- Number of features: 2048
- Summary: we use degree and DEGENSAC to filter raw match on the resized images. It is trained on the MegaDepth training data without the test data in Phototourism.
- Paper: N/A
- Website: N/A
- Processing date: 21-06-23
Phototourism dataset / Stereo track
mAA at 10 degrees: 0.56743 (±0.00000 over 1 run(s) / ±0.13329 over 9 scenes)
Rank (per category): 30 (of 87)
| Scene | Features | Matches (raw) |
Matches (final) |
Rep. @ 3 px. | MS @ 3 px. | mAA(5o) | mAA(10o) |
| BM | 2023.7 | — | 412.8 | 0.415 Rank: 76/87 |
0.859 Rank: 71/87 |
0.31654 (±0.00000) Rank: 30/87 |
0.47104 (±0.00000) Rank: 28/87 |
| FCS | 2041.1 | — | 514.7 | 0.374 Rank: 58/87 |
0.864 Rank: 42/87 |
0.65092 (±0.00000) Rank: 30/87 |
0.76778 (±0.00000) Rank: 30/87 |
| LMS | 2010.4 | — | 439.3 | 0.389 Rank: 54/87 |
0.690 Rank: 25/87 |
0.58027 (±0.00000) Rank: 28/87 |
0.71431 (±0.00000) Rank: 24/87 |
| LB | 2008.3 | — | 373.8 | 0.369 Rank: 58/87 |
0.688 Rank: 53/87 |
0.46659 (±0.00000) Rank: 30/87 |
0.58775 (±0.00000) Rank: 35/87 |
| MC | 2043.6 | — | 479.5 | 0.399 Rank: 60/87 |
0.843 Rank: 62/87 |
0.31826 (±0.00000) Rank: 30/87 |
0.47053 (±0.00000) Rank: 40/87 |
| MR | 2005.7 | — | 422.1 | 0.376 Rank: 72/87 |
0.882 Rank: 53/87 |
0.26893 (±0.00000) Rank: 32/87 |
0.37981 (±0.00000) Rank: 32/87 |
| PSM | 2043.2 | — | 380.6 | 0.295 Rank: 71/87 |
0.603 Rank: 41/87 |
0.23738 (±0.00000) Rank: 23/87 |
0.40133 (±0.00000) Rank: 19/87 |
| SF | 2047.1 | — | 490.1 | 0.337 Rank: 73/87 |
0.774 Rank: 55/87 |
0.50384 (±0.00000) Rank: 29/87 |
0.64719 (±0.00000) Rank: 29/87 |
| SPC | 2047.5 | — | 440.3 | 0.360 Rank: 66/87 |
0.792 Rank: 54/87 |
0.50519 (±0.00000) Rank: 30/87 |
0.66717 (±0.00000) Rank: 28/87 |
| Avg | 2030.1 | — | 439.2 | 0.368 Rank: 67/87 |
0.777 Rank: 54/87 |
0.42755 (±0.00000) Rank: 30/87 |
0.56743 (±0.00000) Rank: 30/87 |
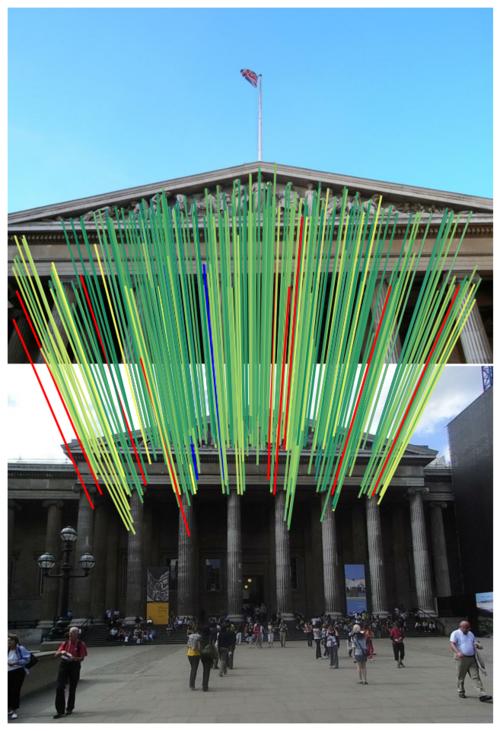
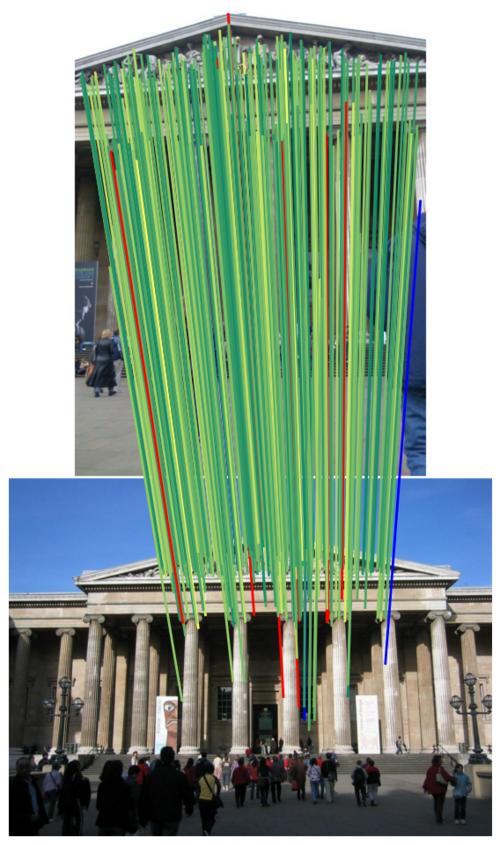
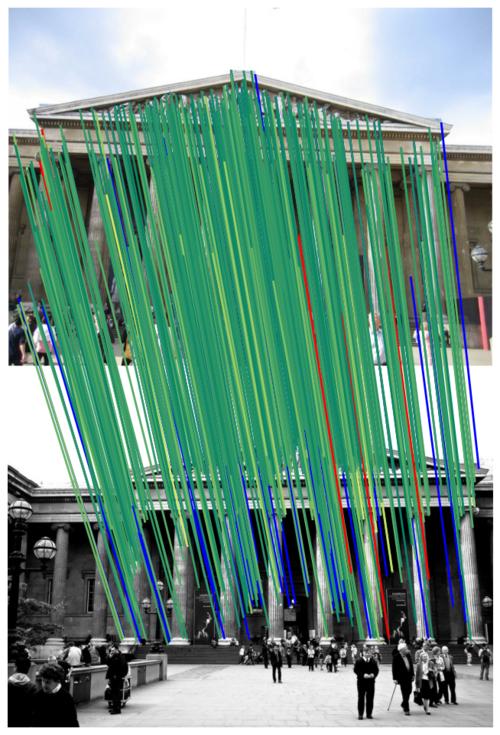
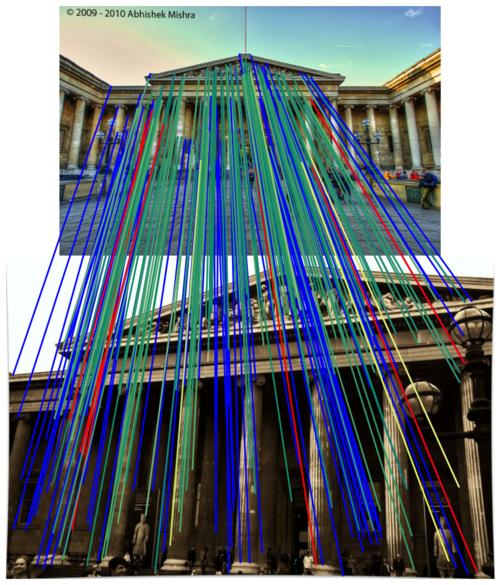
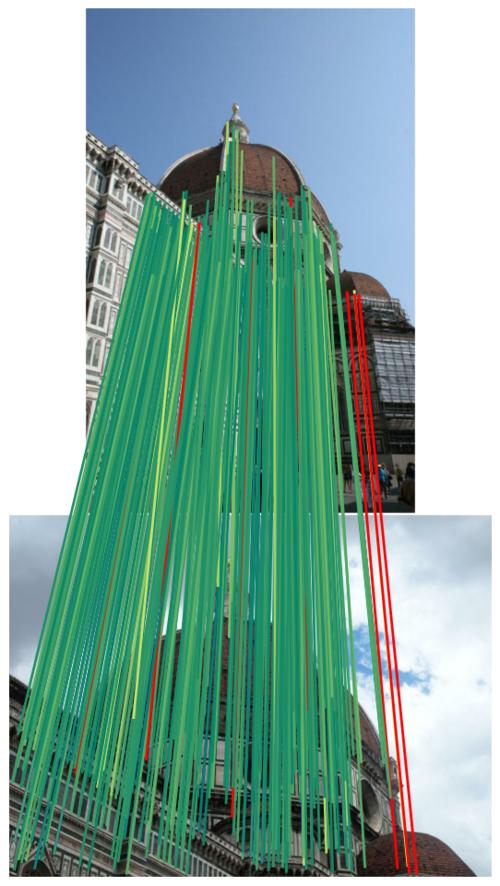
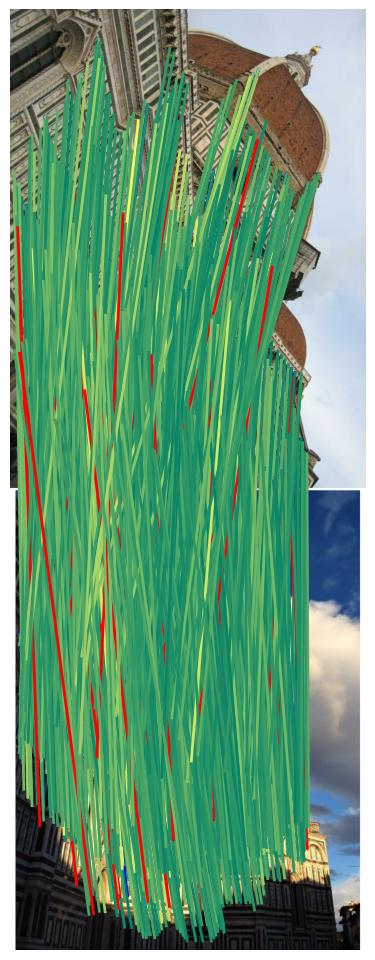
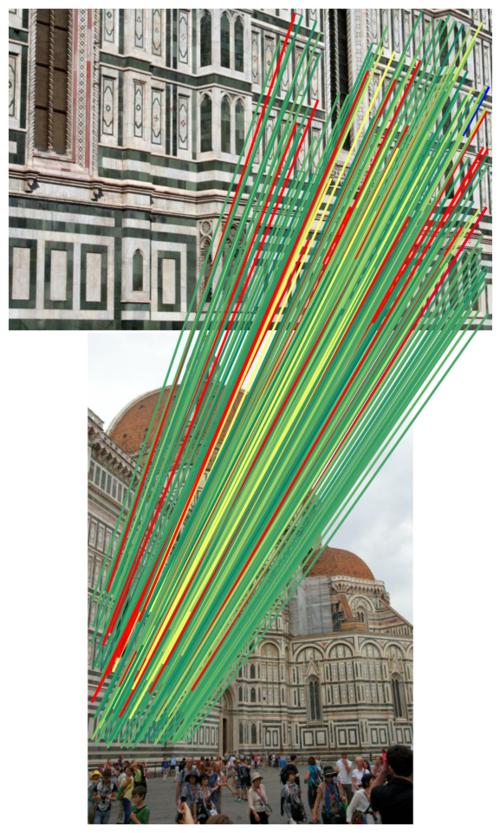
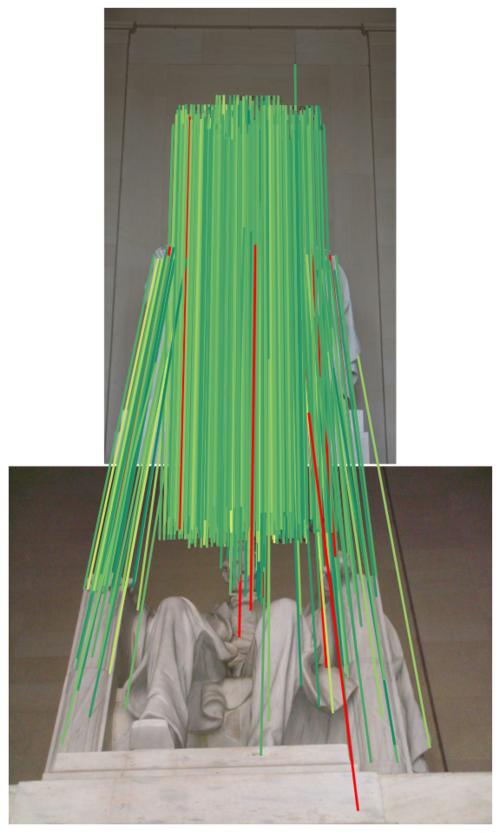
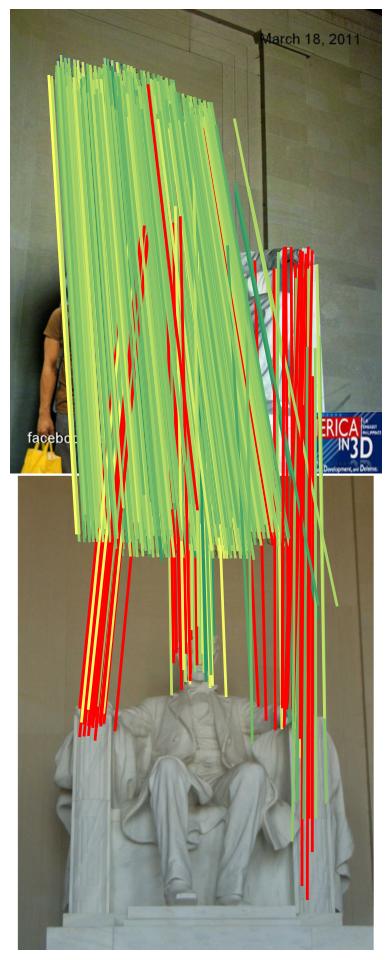
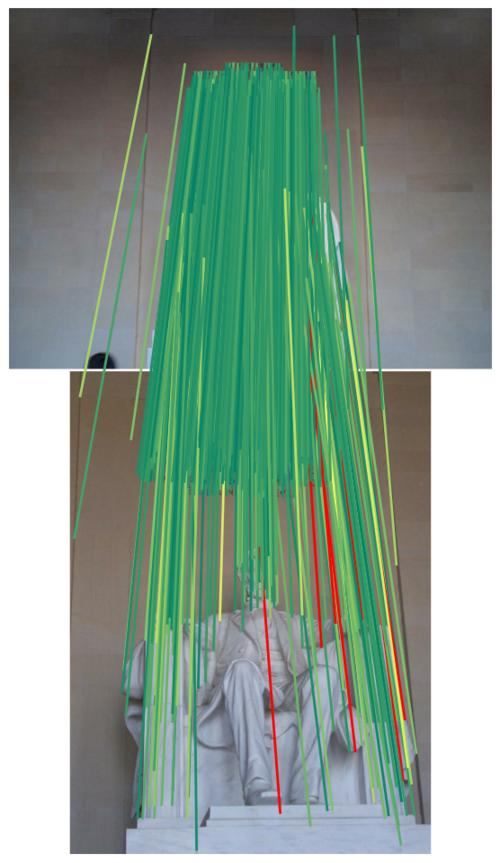
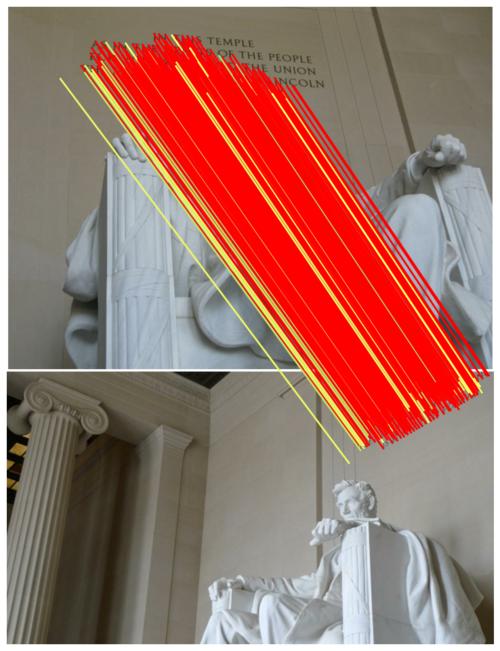
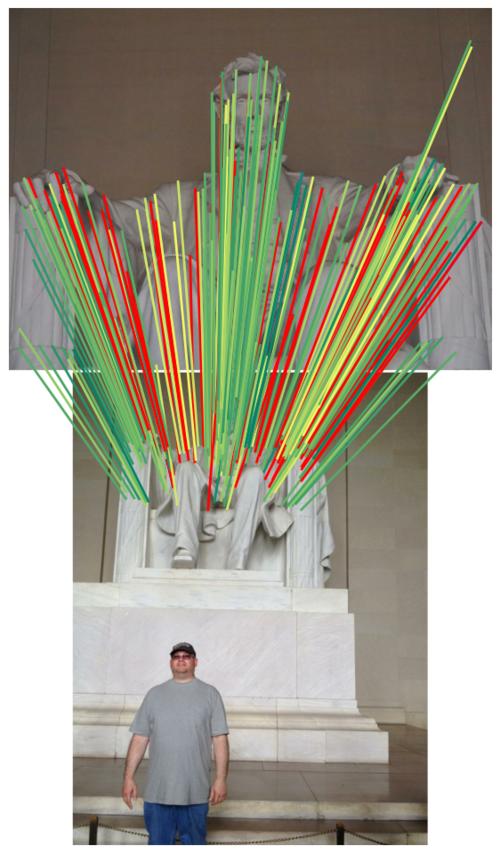
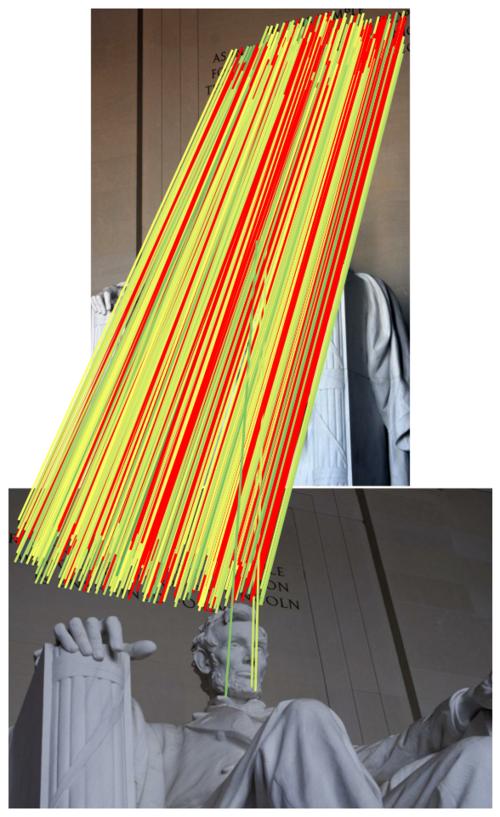
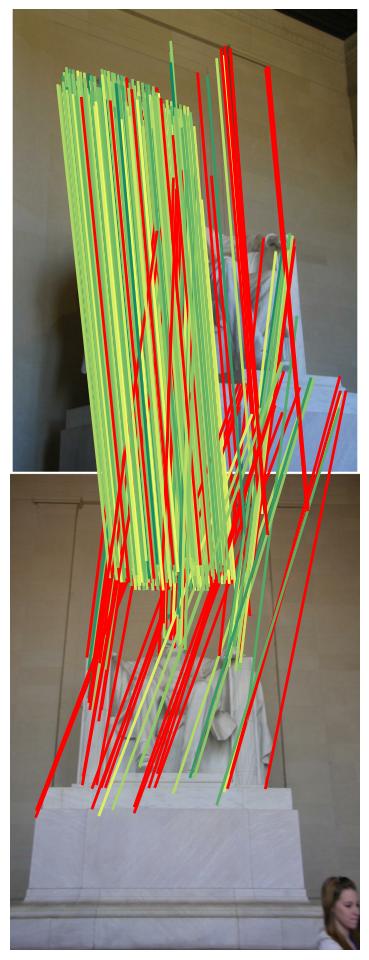
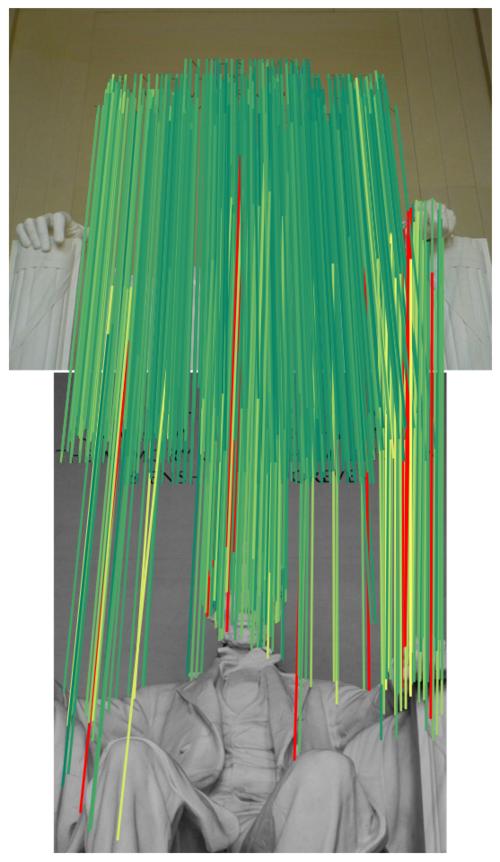
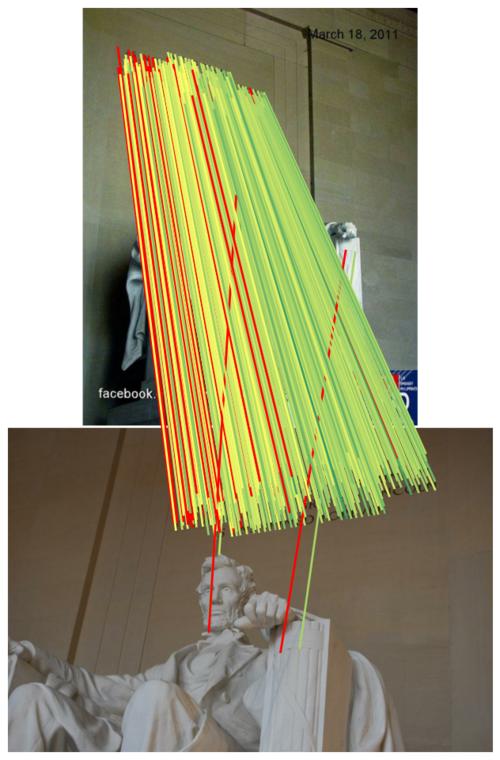
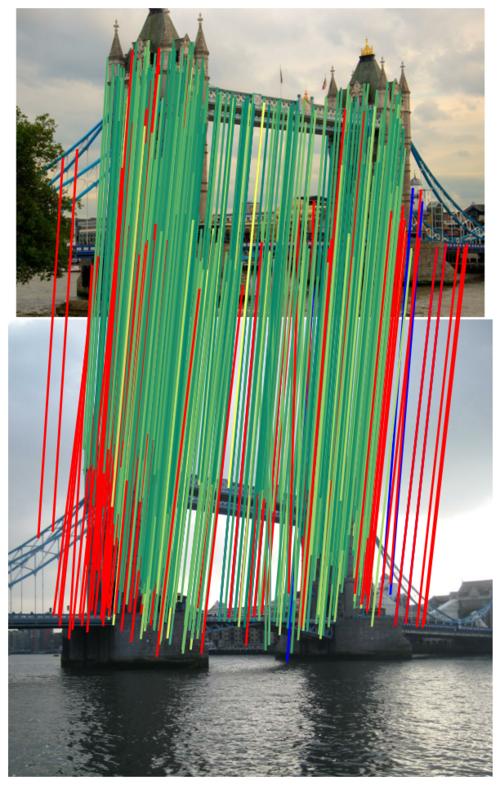
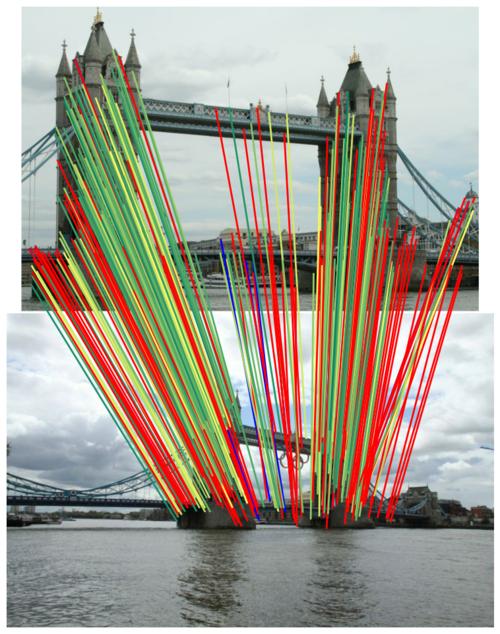
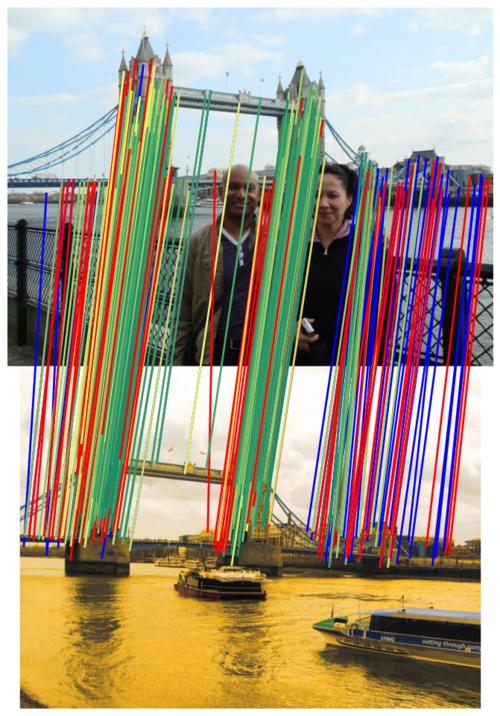
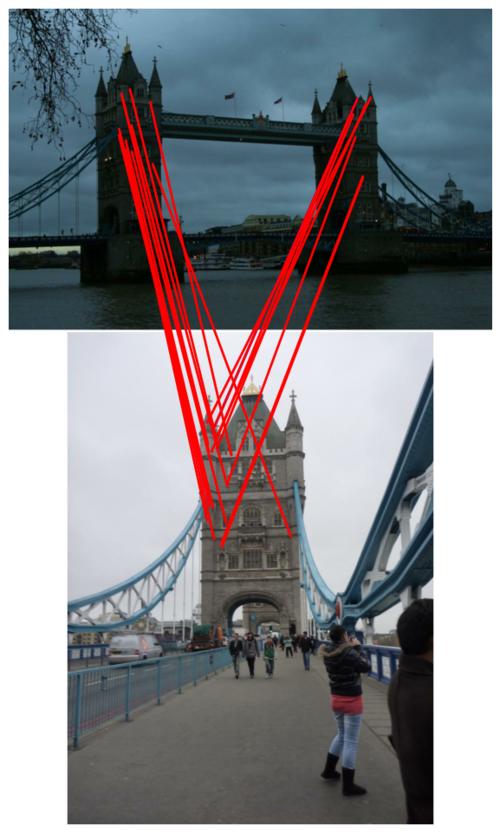
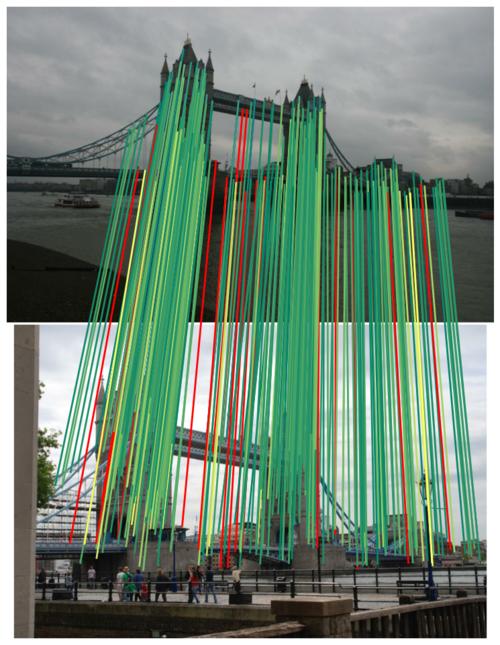
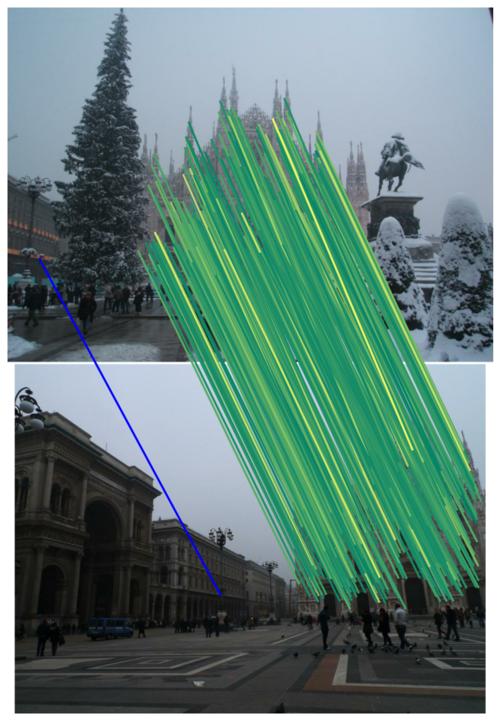
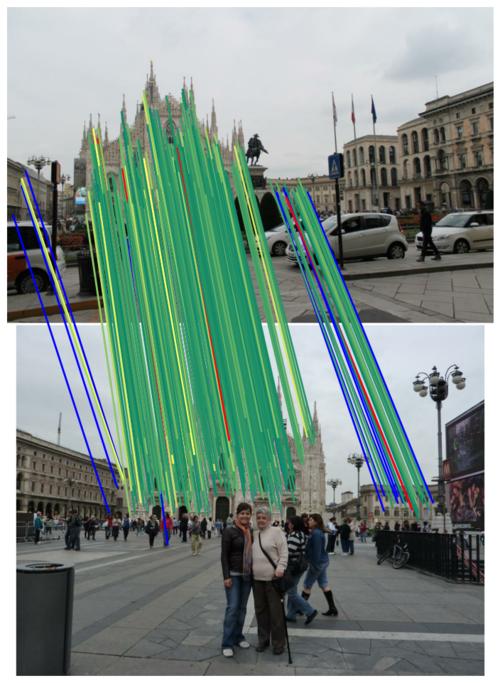
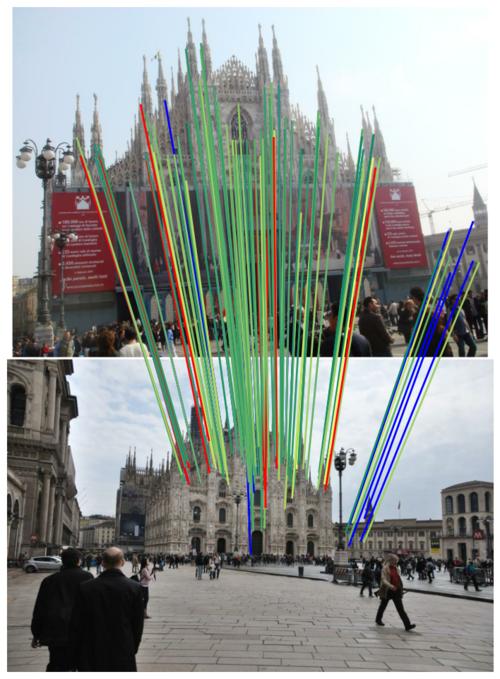
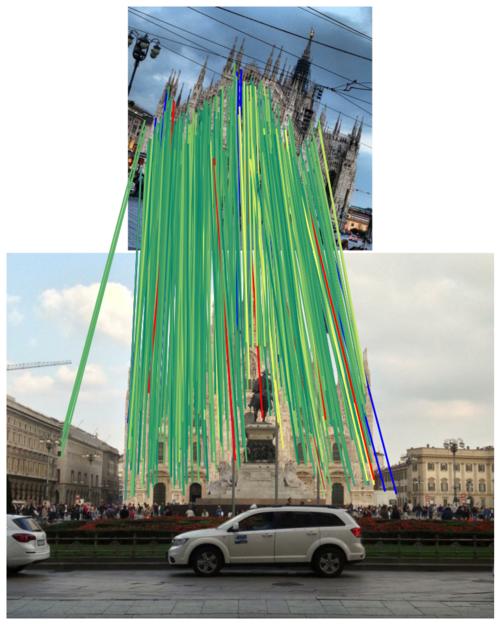
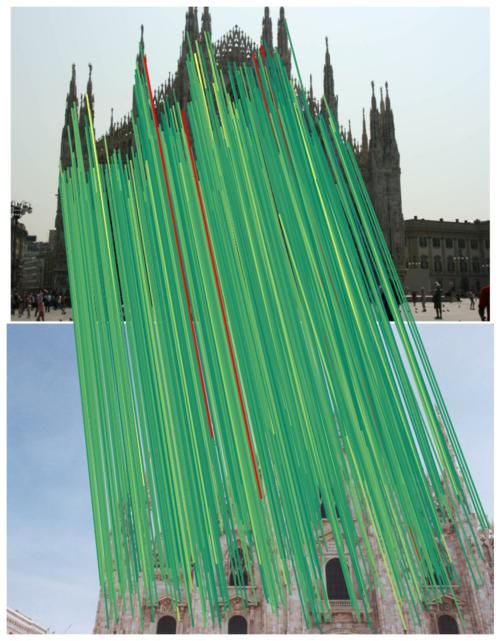
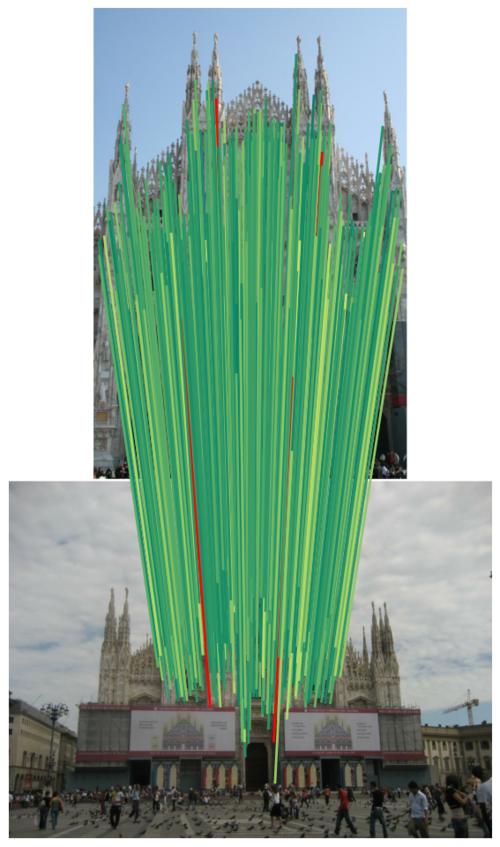
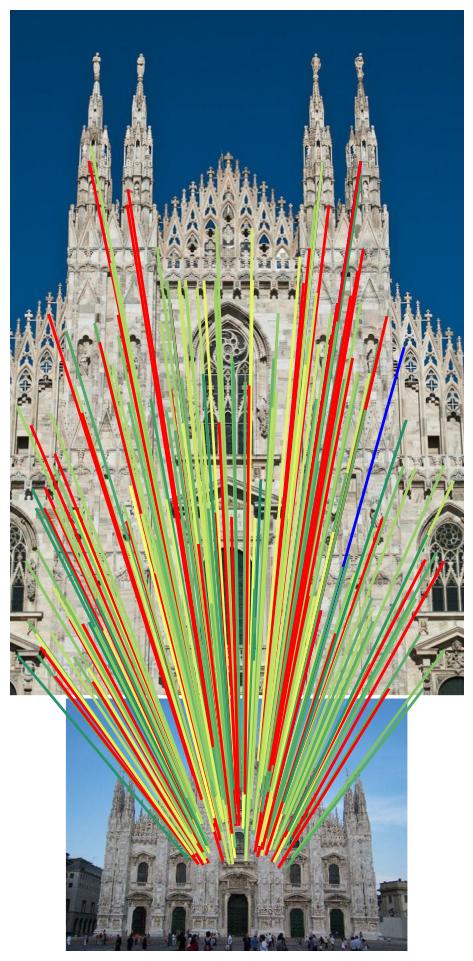
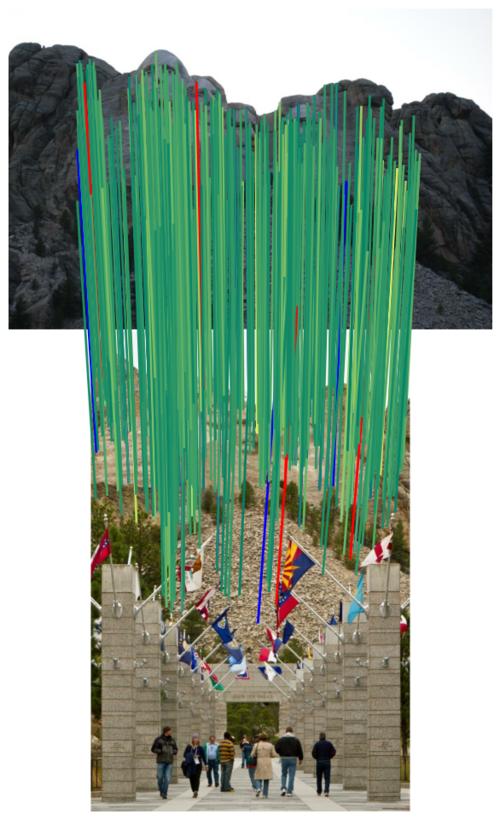
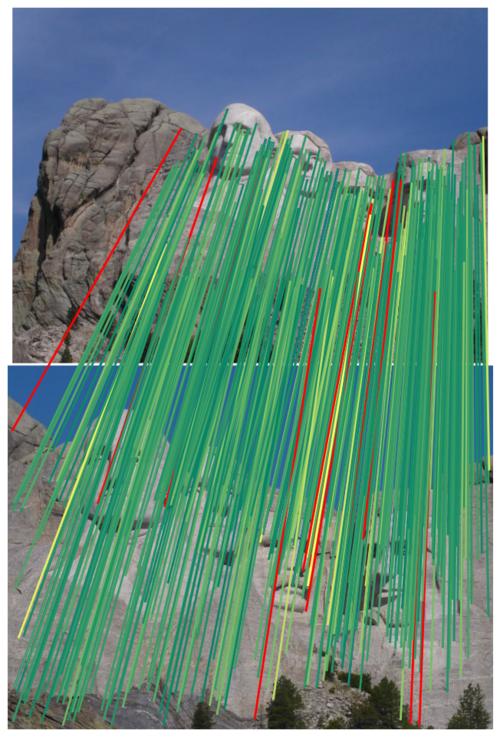
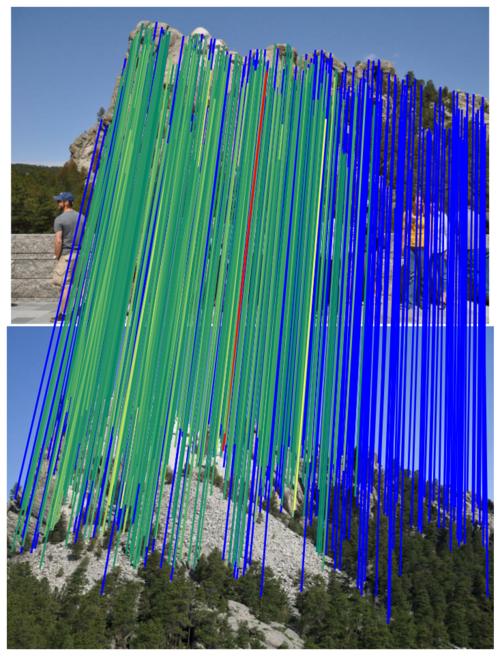
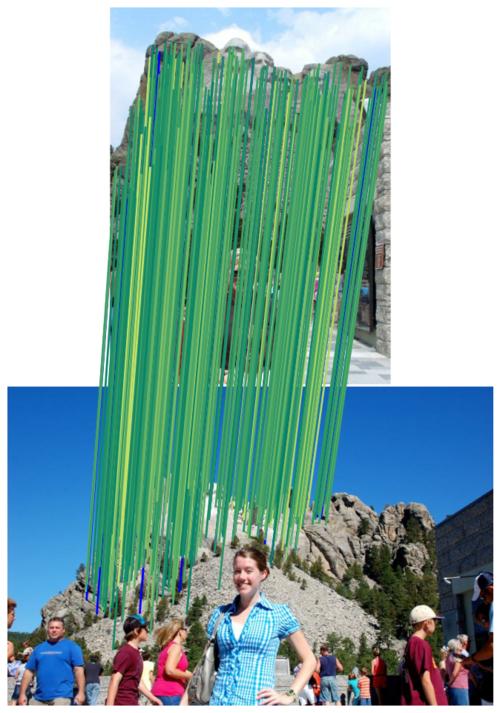
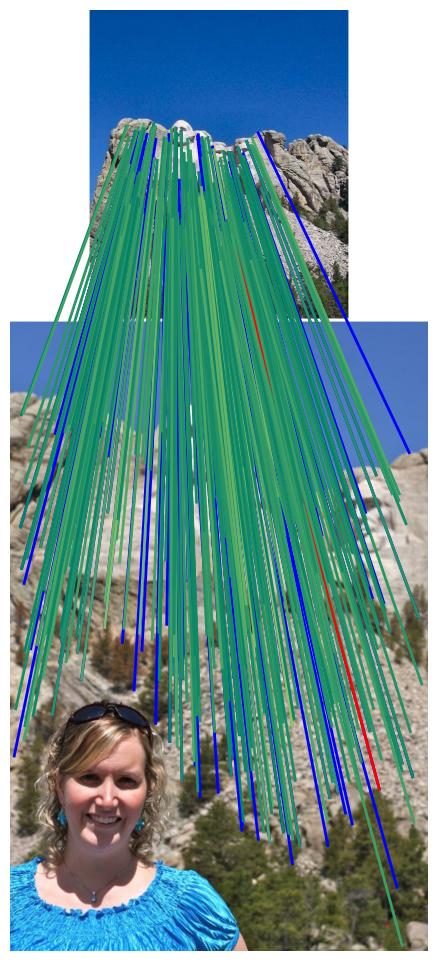
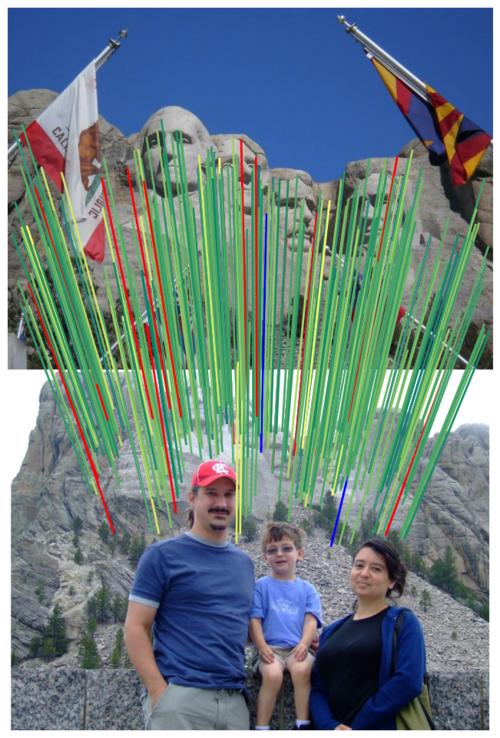
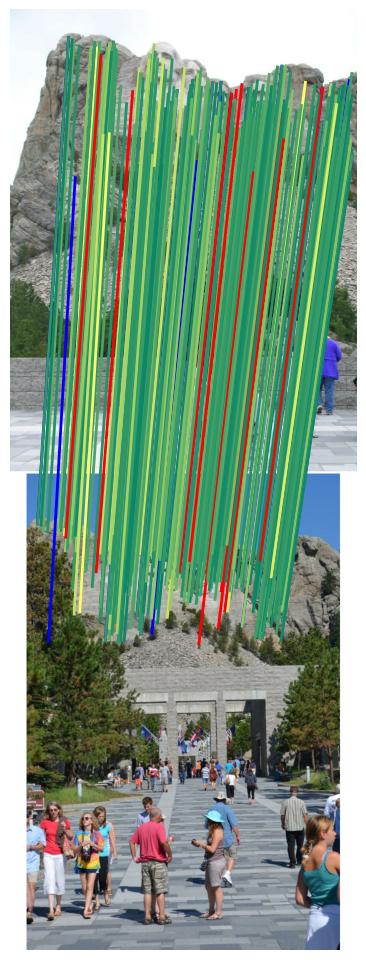
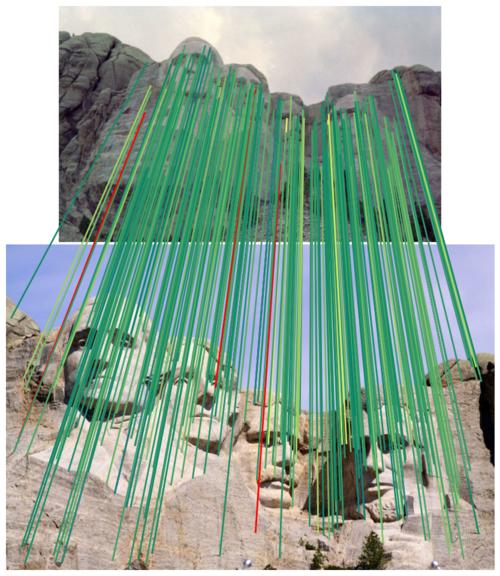
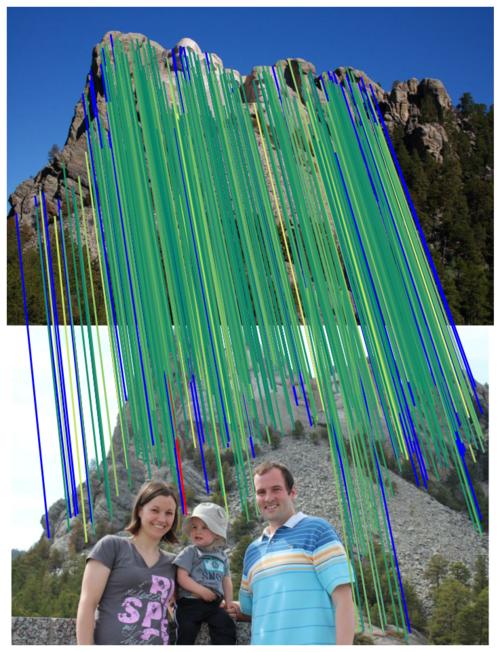
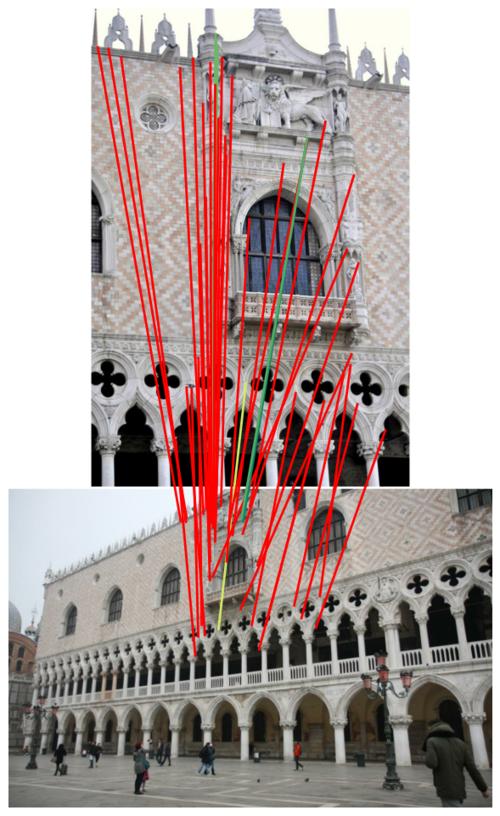
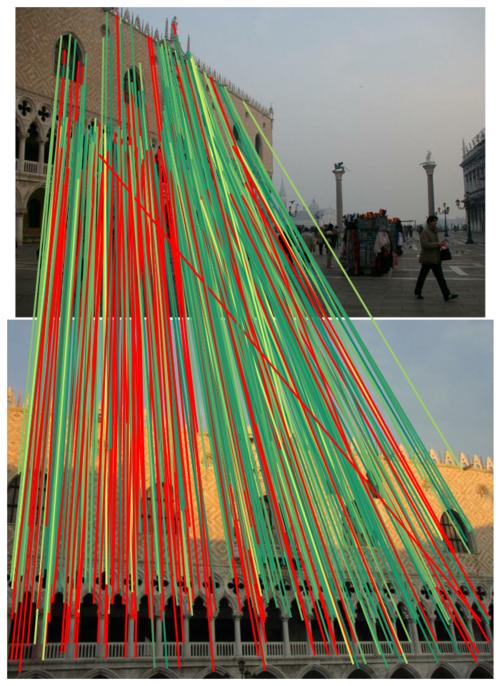
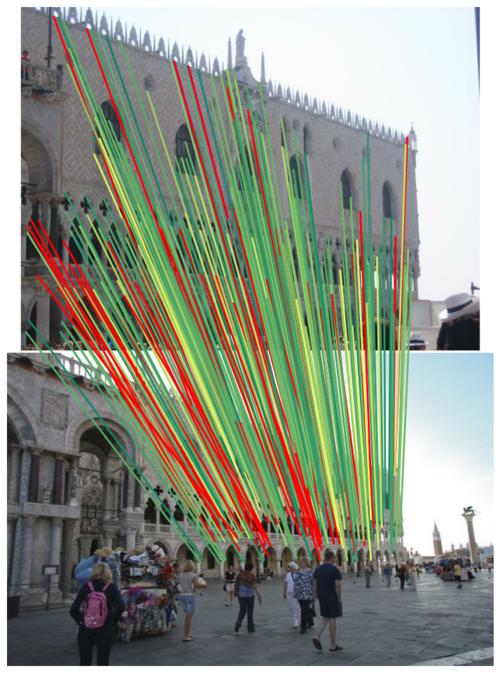
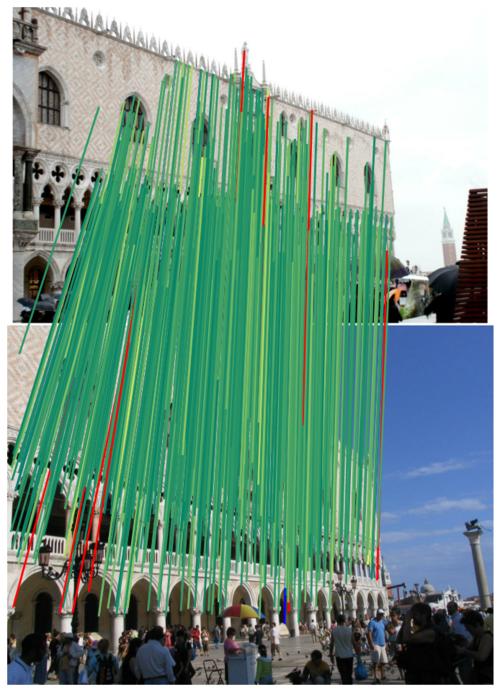
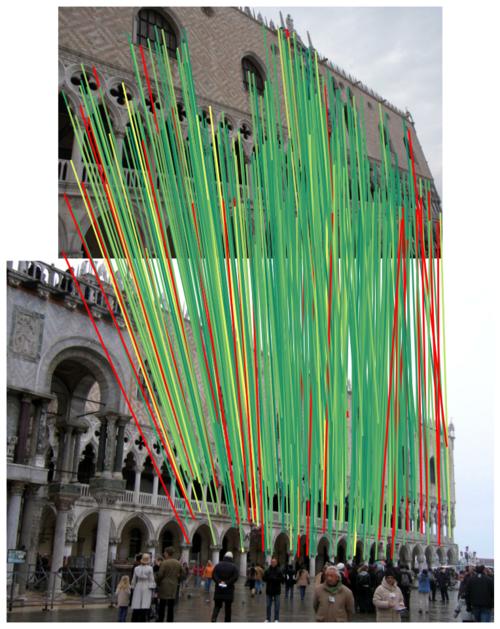
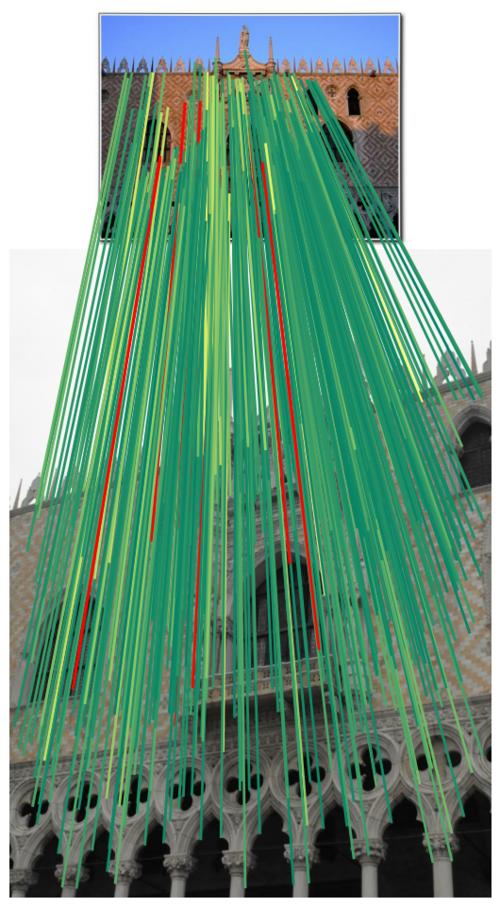
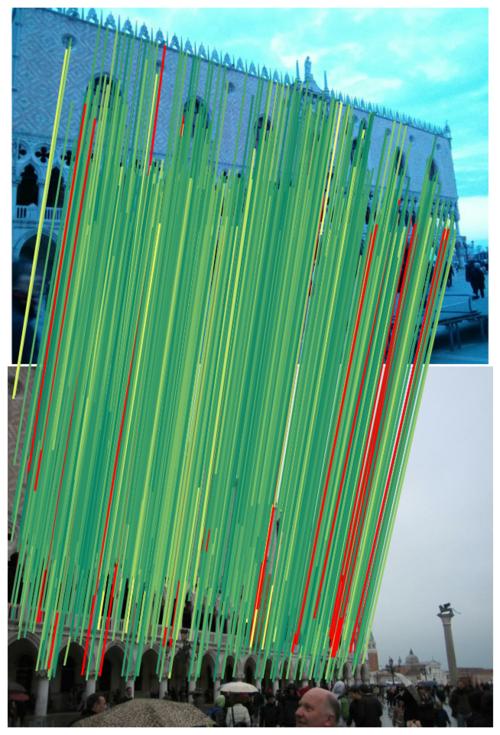
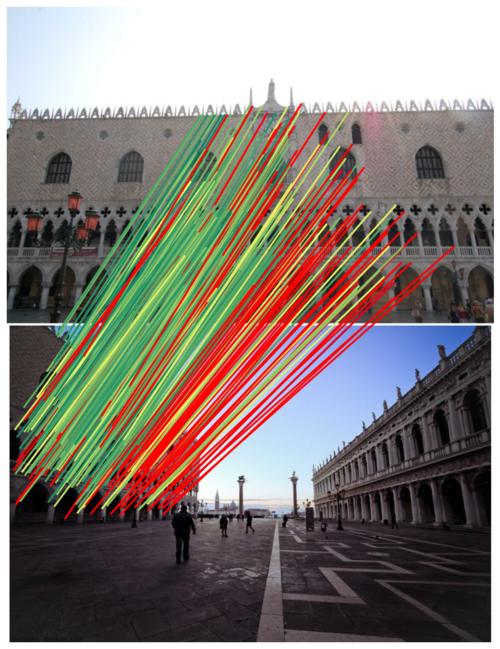
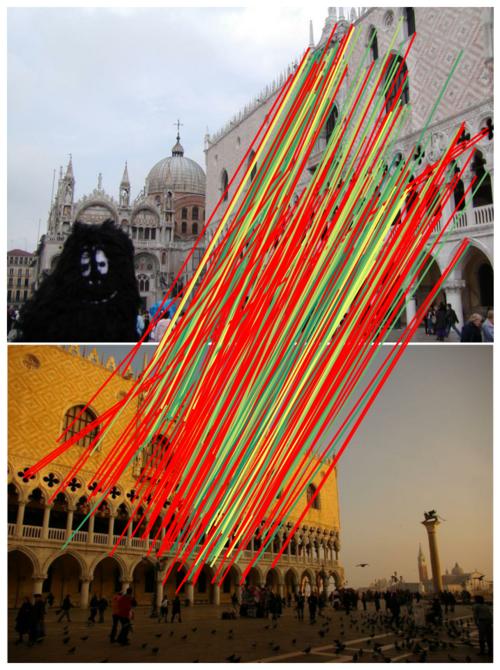
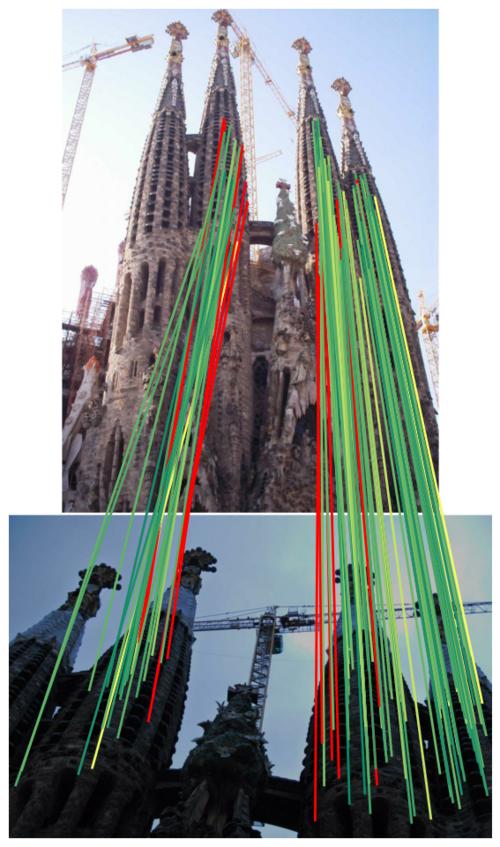
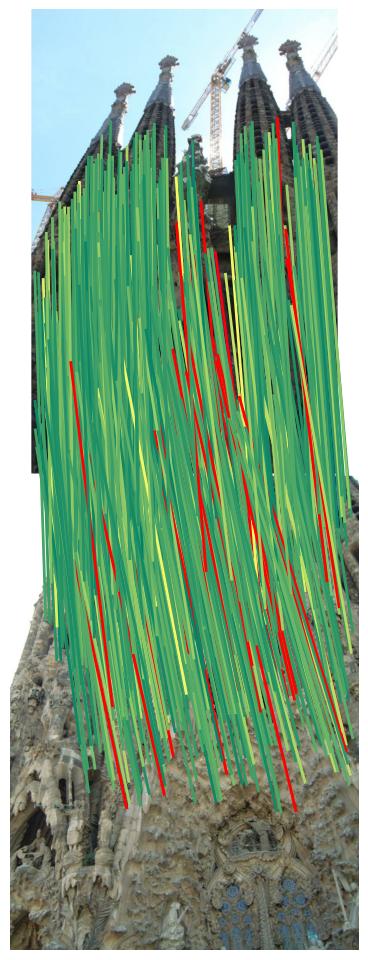
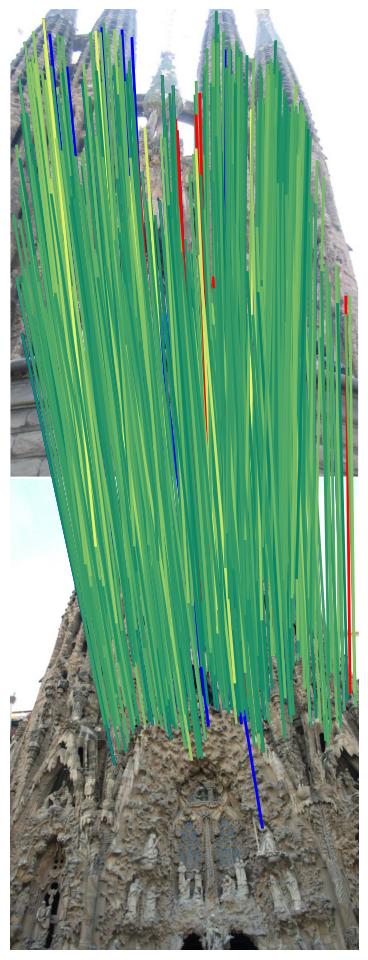
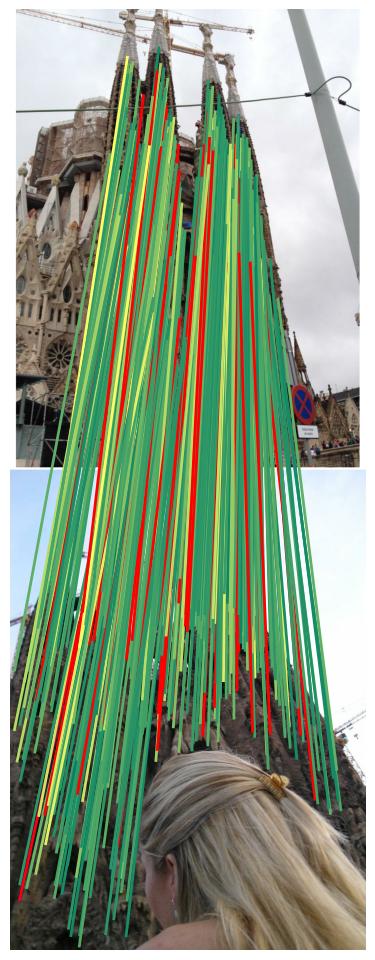
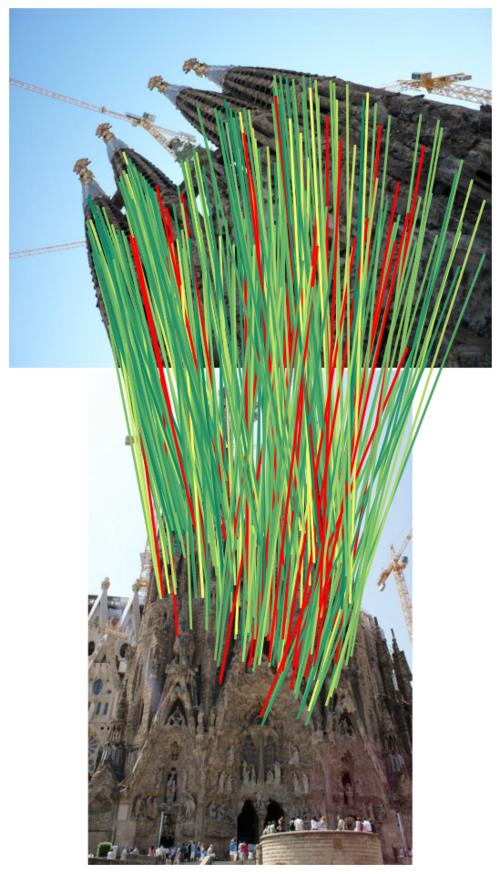
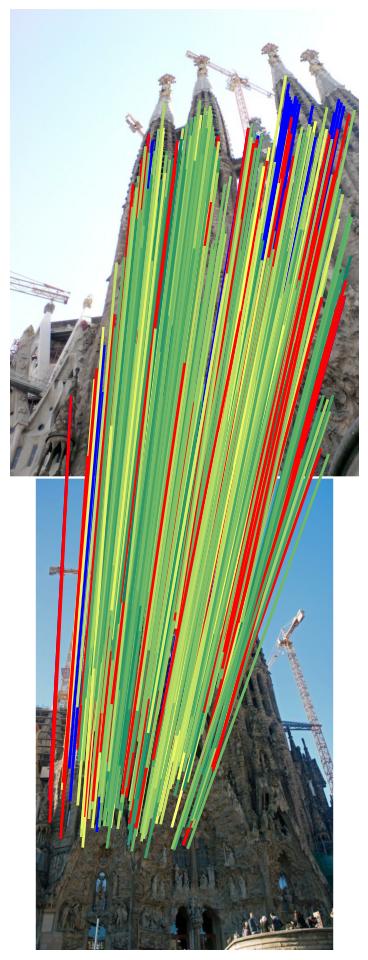
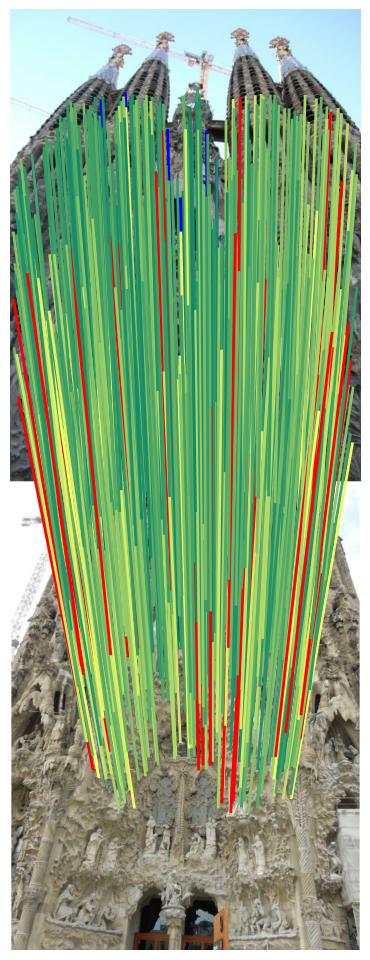
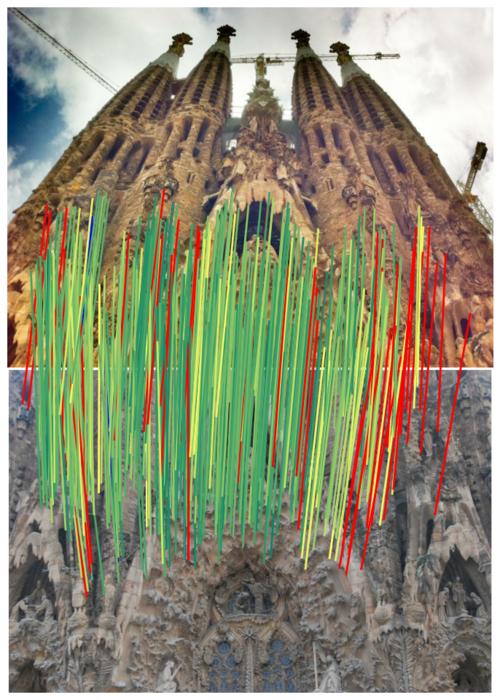
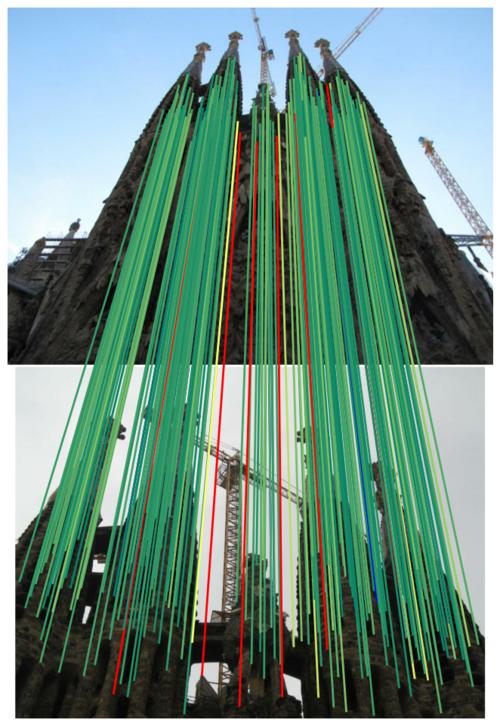
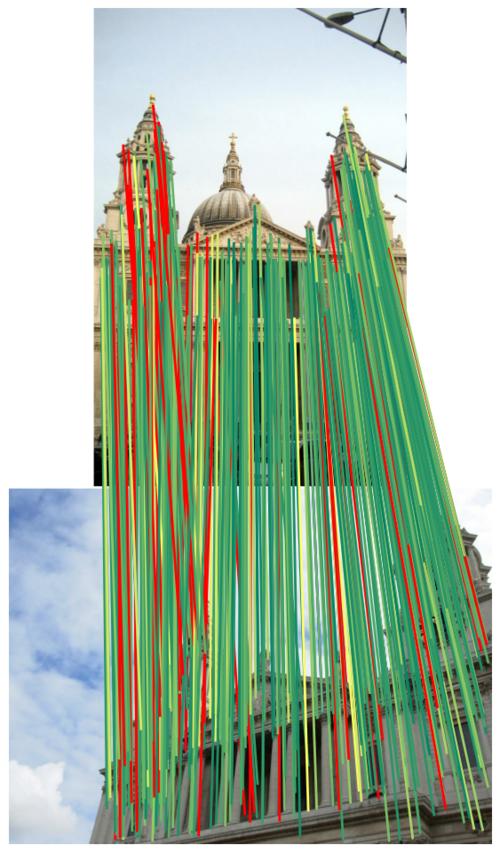
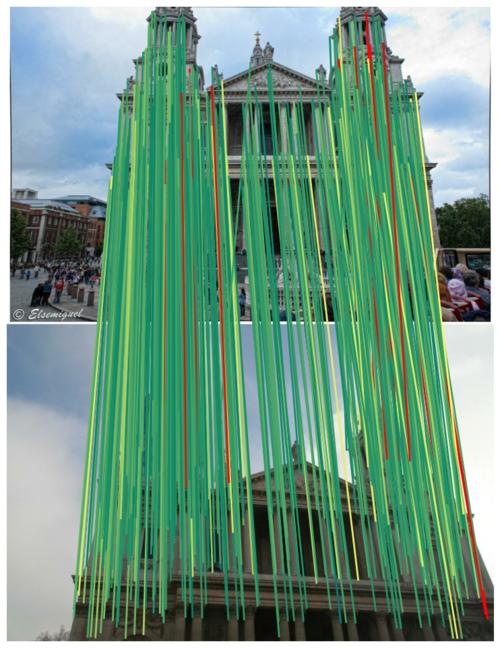
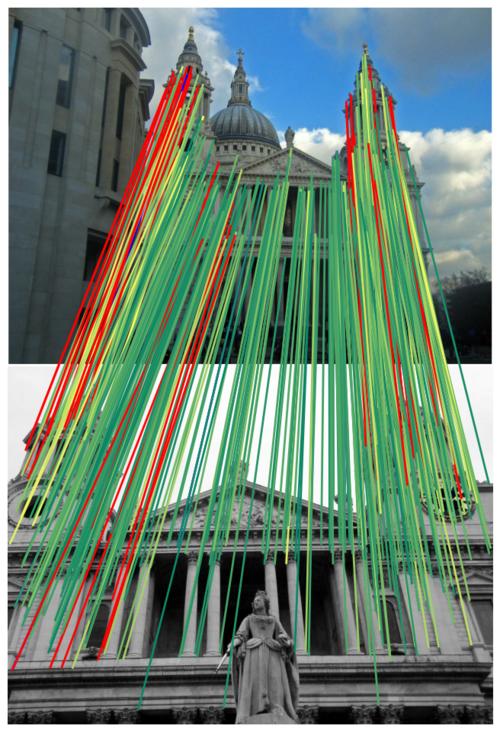
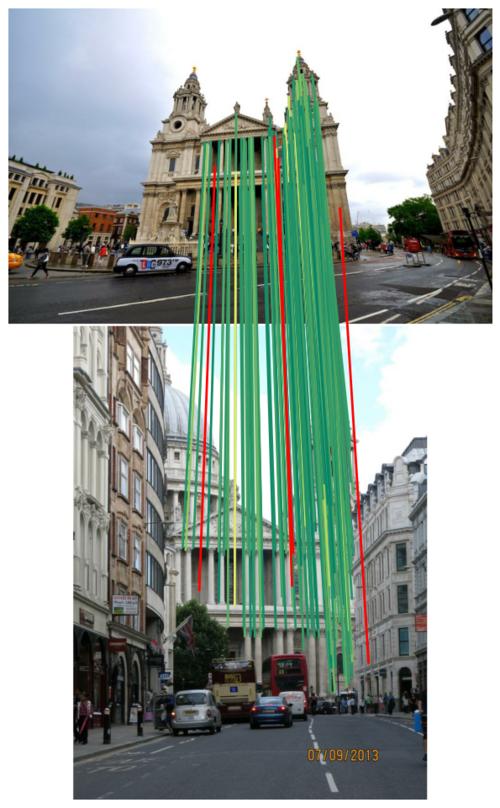
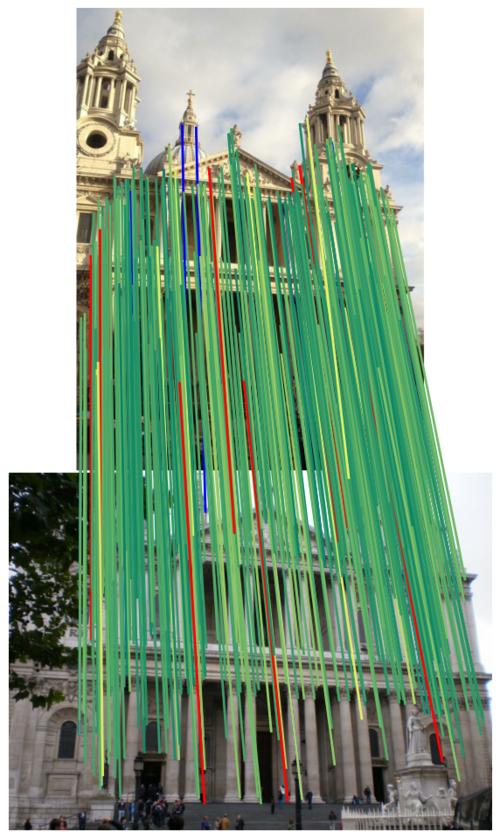
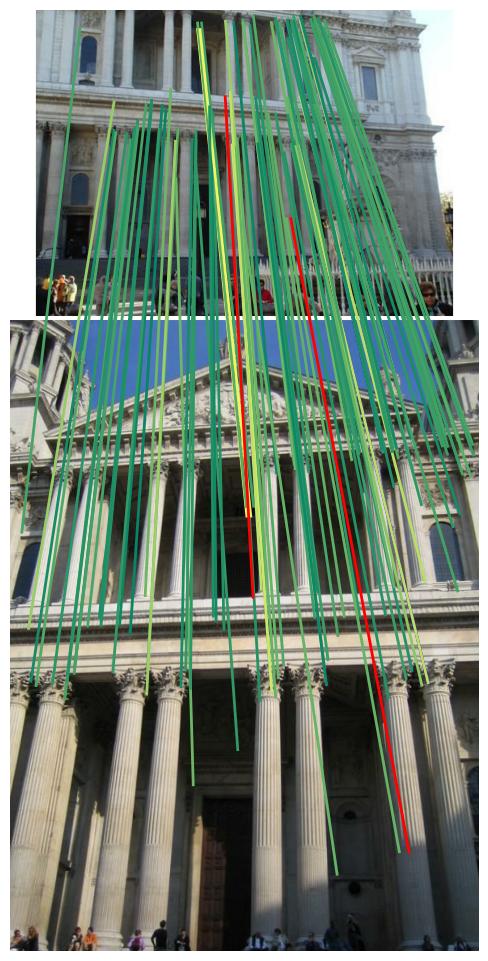
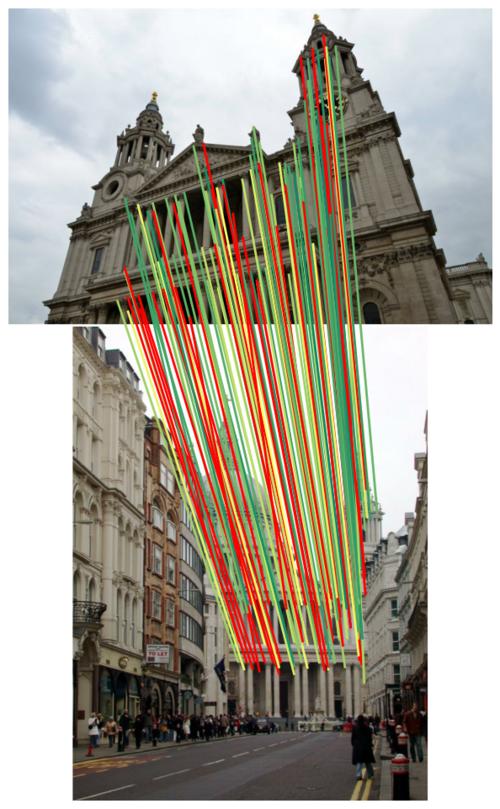
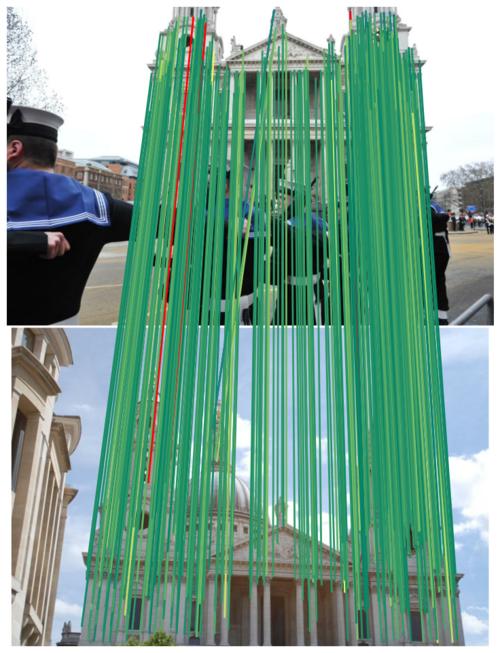
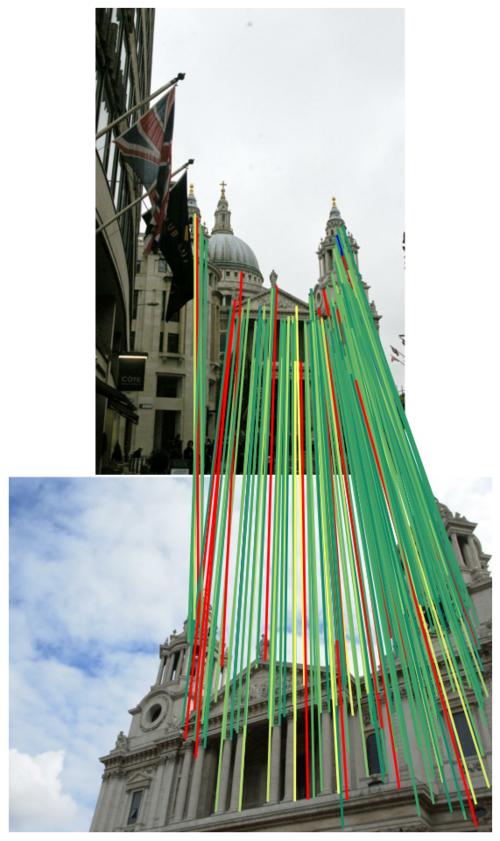
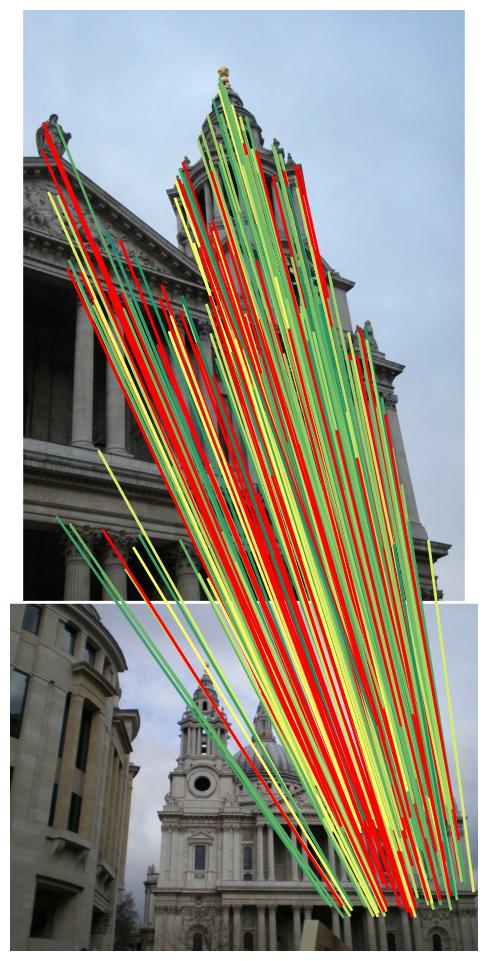
We show the inliers that survive the robust estimation loop (i.e. RANSAC), or those supplied with the submission if using custom matches, and use the depth estimates to determine whether they are correct. We draw matches above a 5-pixel error threshold in red, and those below are color-coded by their error, from 0 (green) to 5 pixels (yellow). Matches for which we do not have depth estimates are drawn in blue. Please note that the depth maps are estimates and may contain errors.
— British Museum —





— Florence Cathedral Side —
— Lincoln Memorial Statue —
— London Bridge —


— Milan Cathedral —
— Mount Rushmore —
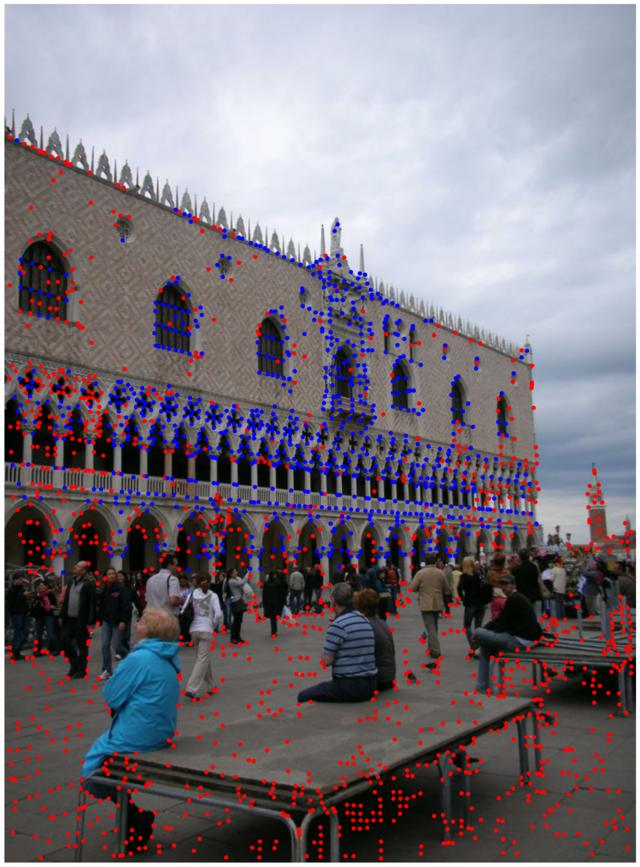
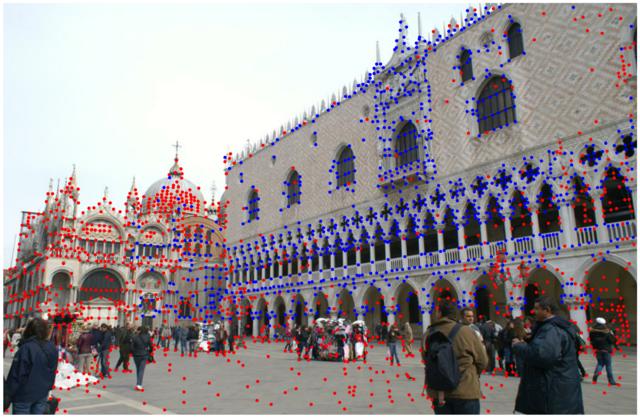
— Piazza San Marco —

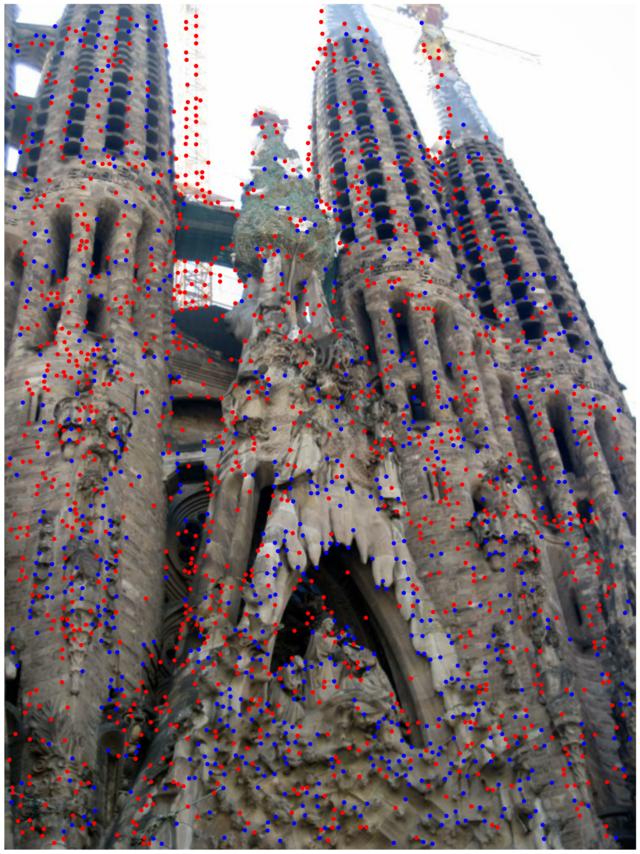
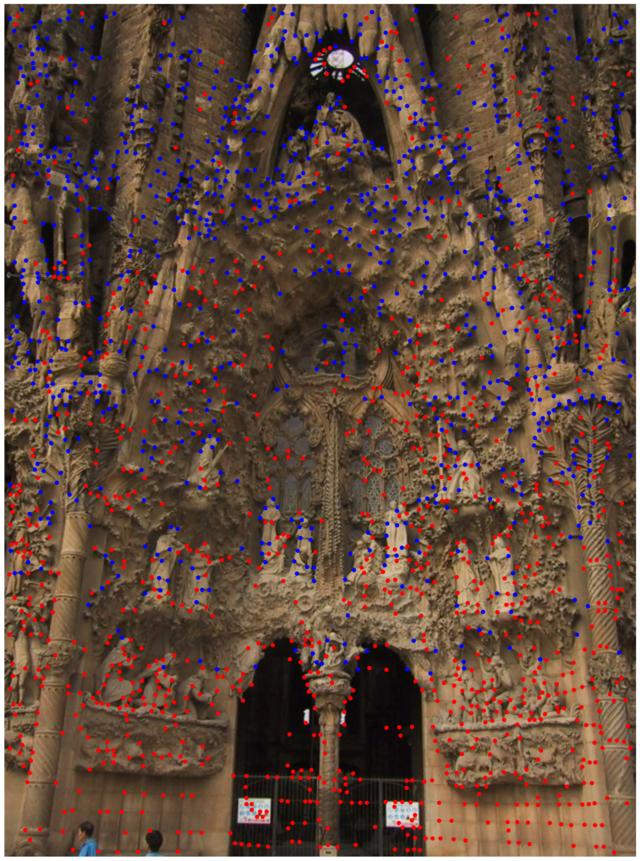
— Sagrada Familia —

— Saint Paul's Cathedral —
Phototourism dataset / Multiview track
mAA at 10 degrees: N/A (±0.00000 over 1 run(s) / ±0.09795 over 9 scenes)
Rank (per category): 27 (of 87)
| Scene | Features | Matches (input) |
RegistrationRatio (%) | Number of Landmarks |
Track Length | ATE | mAA(50) | mAA(100) |
| BM | 2023.7 | 413.77 | 99.95 Rank: 22/87 |
2373.80 Rank: 8/87 |
4.776 Rank: 64/87 |
0.37464 Rank: 36/87 |
0.57318 (±0.00000) Rank: 32/87 |
0.70714 (±0.00000) Rank: 37/87 |
| FCS | 2041.1 | 519.94 | 98.53 Rank: 10/87 |
2875.26 Rank: 5/87 |
4.898 Rank: 42/87 |
0.24940 Rank: 35/87 |
0.75875 (±0.00000) Rank: 11/87 |
0.81641 (±0.00000) Rank: 9/87 |
| LMS | 2010.4 | 457.00 | 99.40 Rank: 24/87 |
1923.83 Rank: 38/87 |
5.321 Rank: 54/87 |
0.28889 Rank: 31/87 |
0.83650 (±0.00000) Rank: 36/87 |
0.88932 (±0.00000) Rank: 38/87 |
| LB | 2008.3 | 440.12 | 98.09 Rank: 46/87 |
2232.27 Rank: 13/87 |
5.049 Rank: 51/87 |
0.50308 Rank: 61/87 |
0.71359 (±0.00000) Rank: 33/87 |
0.80648 (±0.00000) Rank: 33/87 |
| MC | 2043.6 | 472.62 | 100.00 Rank: 1/87 |
2521.91 Rank: 10/87 |
5.124 Rank: 35/87 |
0.34826 Rank: 19/87 |
0.55848 (±0.00000) Rank: 19/87 |
0.70203 (±0.00000) Rank: 27/87 |
| MR | 2005.7 | 413.18 | 94.03 Rank: 45/87 |
2384.13 Rank: 23/87 |
4.687 Rank: 49/87 |
0.49641 Rank: 17/87 |
0.43679 (±0.00000) Rank: 24/87 |
0.55865 (±0.00000) Rank: 23/87 |
| PSM | 2043.2 | 377.68 | 99.68 Rank: 8/87 |
2715.53 Rank: 9/87 |
4.403 Rank: 38/87 |
0.36639 Rank: 37/87 |
0.64930 (±0.00000) Rank: 19/87 |
0.74011 (±0.00000) Rank: 17/87 |
| SF | 2047.1 | 482.19 | 99.81 Rank: 21/87 |
2974.76 Rank: 12/87 |
4.806 Rank: 55/87 |
0.28164 Rank: 31/87 |
0.77800 (±0.00000) Rank: 27/87 |
0.85957 (±0.00000) Rank: 30/87 |
| SPC | 2047.5 | 450.15 | 100.00 Rank: 1/87 |
2544.28 Rank: 9/87 |
5.040 Rank: 49/87 |
0.46551 Rank: 43/87 |
0.75722 (±0.00000) Rank: 19/87 |
0.85041 (±0.00000) Rank: 18/87 |
| Avg | 2030.1 | 447.41 | 98.83 Rank: 23/87 |
2505.09 Rank: 16/87 |
4.900 Rank: 51/87 |
0.37491 Rank: 36/87 |
0.67353 (±0.00000) Rank: 28/87 |
0.77001 (±0.00000) Rank: 27/87 |
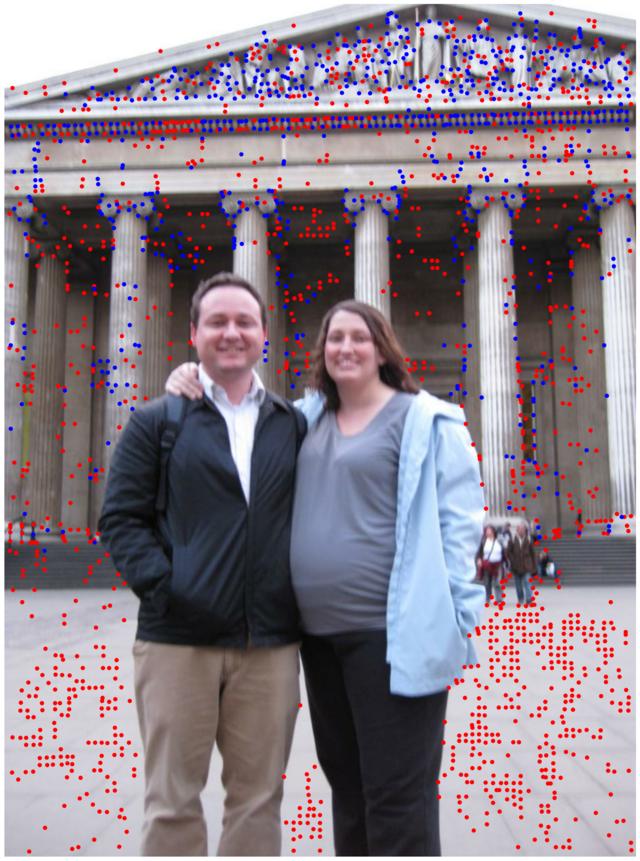
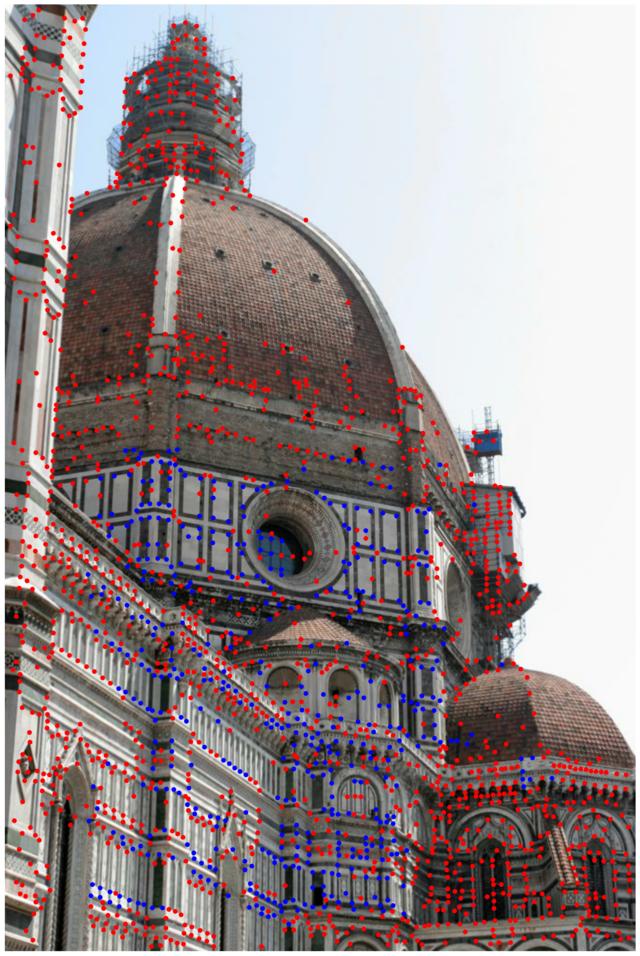
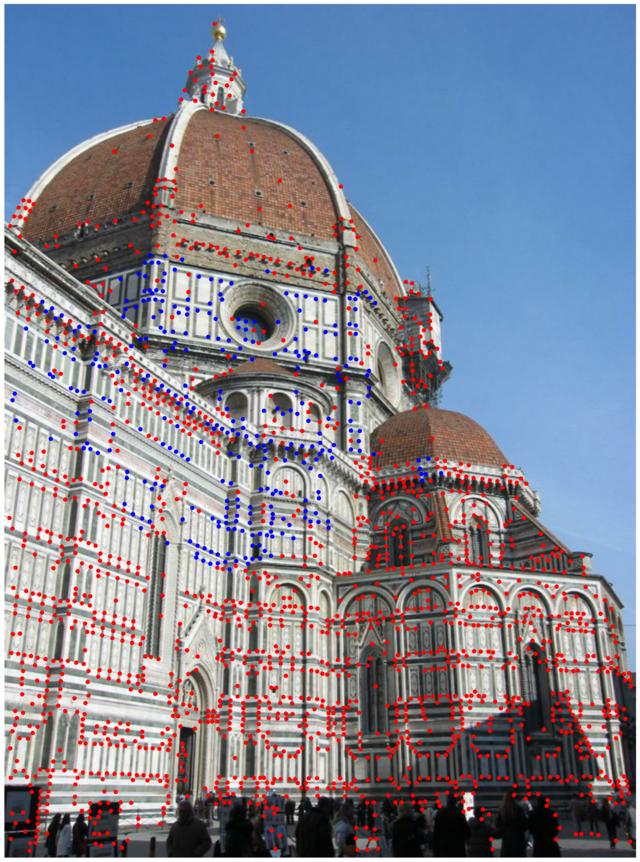
In the multi-view track we reconstruct the scene with Structure-from-Motion (Colmap) with small sets of images. We show the results for one bag of 10 images. Keypoints are drawn in blue if they are part of the model, and in red otherwise.
— British Museum —









— Florence Cathedral Side —




— Lincoln Memorial Statue —

— London Bridge —








— Milan Cathedral —








— Mount Rushmore —







— Piazza San Marco —








— Sagrada Familia —


— Saint Paul's Cathedral —










Prague Parks dataset / Stereo track
mAA at 10 degrees: 0.74421 (±0.00000 over 1 run(s) / ±0.03549 over 3 scenes)
Rank (per category): 23 (of 87)
| Scene | Features | Matches (raw) |
Matches (final) |
Rep. @ 3 px. | MS @ 3 px. | mAA(5o) | mAA(10o) |
| Lizard | 1884.7 | — | 305.0 | 0.031 Rank: 55/87 |
0.009 Rank: 48/87 |
0.58696 (±0.00000) Rank: 16/87 |
0.72233 (±0.00000) Rank: 16/87 |
| Pond | 2048.0 | — | 321.1 | 0.047 Rank: 66/87 |
0.046 Rank: 64/87 |
0.56393 (±0.00000) Rank: 24/87 |
0.71603 (±0.00000) Rank: 23/87 |
| Tree | 2048.0 | — | 199.1 | 0.028 Rank: 61/87 |
0.026 Rank: 8/87 |
0.67241 (±0.00000) Rank: 29/87 |
0.79426 (±0.00000) Rank: 29/87 |
| Avg | 1993.6 | — | 275.0 | 0.035 Rank: 59/87 |
0.027 Rank: 37/87 |
0.60777 (±0.00000) Rank: 25/87 |
0.74421 (±0.00000) Rank: 23/87 |
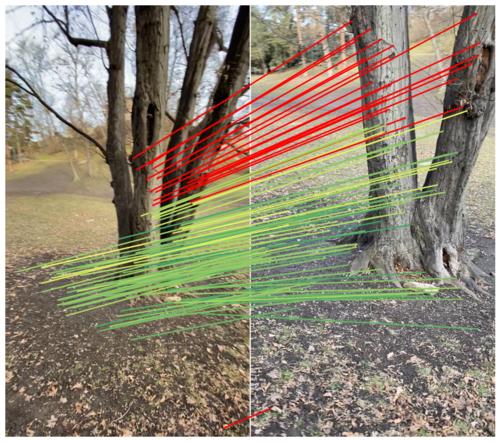
We show the inliers that survive the robust estimation loop (i.e. RANSAC), or those supplied with the submission if using custom matches, and use the depth estimates to determine whether they are correct. We draw matches above a 5-pixel error threshold in red, and those below are color-coded by their error, from 0 (green) to 5 pixels (yellow). Matches for which we do not have depth estimates are drawn in blue. Please note that the depth maps are estimates and may contain errors.
— Lizard —


— Pond —

— Tree —






Prague Parks dataset / Multiview track
mAA at 10 degrees: N/A (±0.00000 over 1 run(s) / ±0.13883 over 3 scenes)
Rank (per category): 8 (of 87)
| Scene | Features | Matches (input) |
RegistrationRatio (%) | Number of Landmarks |
Track Length | ATE | mAA(50) | mAA(100) |
| Lizard | 1884.7 | 332.14 | 85.30 Rank: 19/87 |
1069.03 Rank: 27/87 |
3.381 Rank: 35/87 |
14.23819 Rank: 47/87 |
0.59549 (±0.00000) Rank: 9/87 |
0.67620 (±0.00000) Rank: 12/87 |
| Pond | 2048.0 | 356.42 | 67.20 Rank: 52/87 |
842.23 Rank: 44/87 |
2.804 Rank: 56/87 |
0.43029 Rank: 41/87 |
0.30382 (±0.00000) Rank: 3/87 |
0.33800 (±0.00000) Rank: 3/87 |
| Tree | 2048.0 | 195.02 | 71.91 Rank: 22/87 |
485.56 Rank: 41/87 |
2.974 Rank: 37/87 |
6.20221 Rank: 61/87 |
0.43791 (±0.00000) Rank: 27/87 |
0.47633 (±0.00000) Rank: 27/87 |
| Avg | 1993.6 | 294.53 | 74.80 Rank: 36/87 |
798.94 Rank: 34/87 |
3.053 Rank: 48/87 |
6.95690 Rank: 54/87 |
0.44574 (±0.00000) Rank: 10/87 |
0.49684 (±0.00000) Rank: 8/87 |
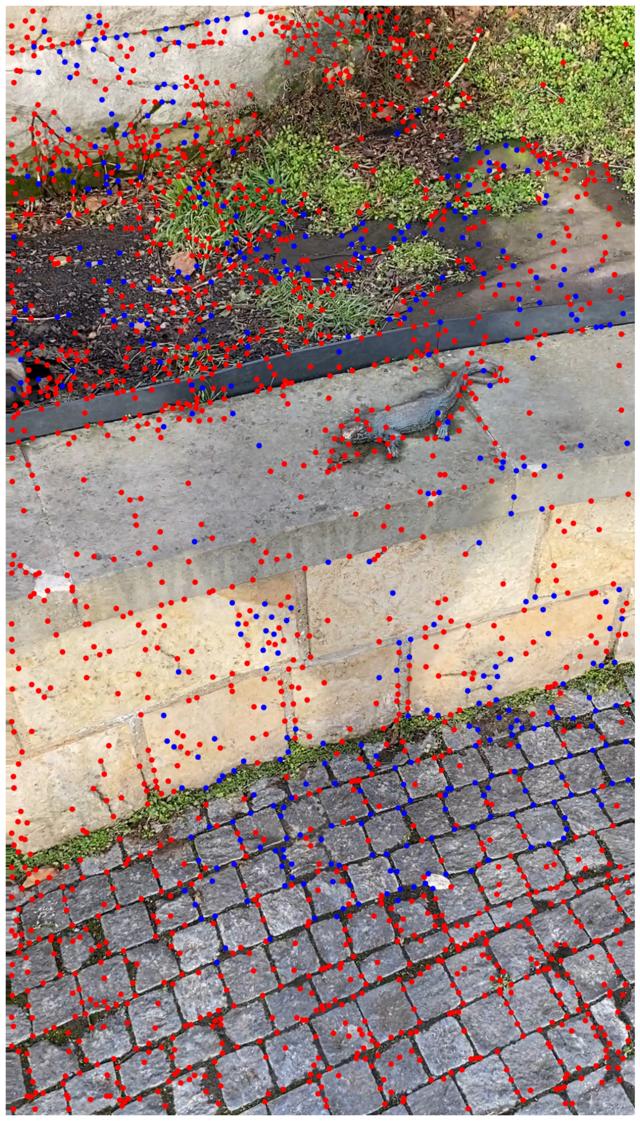
In the multi-view track we reconstruct the scene with Structure-from-Motion (Colmap) with small sets of images. We show the results for one bag of 10 images. Keypoints are drawn in blue if they are part of the model, and in red otherwise.
— Lizard —

— Pond —




— Tree —




Google Urban dataset / Stereo track
mAA at 10 degrees: 0.42400 (±0.00000 over 1 run(s) / ±0.13743 over 17 scenes)
Rank (per category): 1 (of 87)
| Scene | Features | Matches (raw) |
Matches (final) |
mAA(5o) | mAA(10o) |
| Amsterdam (AMS) | 2048.0 | — | 370.8 | 0.28839 (±0.00000) Rank: 1/87 |
0.45714 (±0.00000) Rank: 1/87 |
| Bangkok (BGK) | 1910.9 | — | 406.4 | 0.07792 (±0.00000) Rank: 1/87 |
0.19429 (±0.00000) Rank: 2/87 |
| Barcelona (BCN) | 1953.9 | — | 360.8 | 0.14359 (±0.00000) Rank: 2/87 |
0.24322 (±0.00000) Rank: 2/87 |
| Buenos Aires (BAR) | 2027.5 | — | 322.1 | 0.25388 (±0.00000) Rank: 1/87 |
0.41553 (±0.00000) Rank: 1/87 |
| Cambridge (CAM) | 1990.8 | — | 357.0 | 0.33836 (±0.00000) Rank: 1/87 |
0.49863 (±0.00000) Rank: 1/87 |
| Cannes (CAN) | 1948.2 | — | 405.0 | 0.40369 (±0.00000) Rank: 10/87 |
0.52673 (±0.00000) Rank: 10/87 |
| Chicago (CHI) | 1884.6 | — | 221.7 | 0.26175 (±0.00000) Rank: 1/87 |
0.40840 (±0.00000) Rank: 1/87 |
| Helsinki (HEL) | 1710.4 | — | 581.4 | 0.41237 (±0.00000) Rank: 1/87 |
0.59845 (±0.00000) Rank: 1/87 |
| Madrid (MAD) | 1887.9 | — | 229.3 | 0.09119 (±0.00000) Rank: 14/87 |
0.20000 (±0.00000) Rank: 16/87 |
| Mountain View (MTV) | 1891.7 | — | 314.7 | 0.25742 (±0.00000) Rank: 2/87 |
0.41758 (±0.00000) Rank: 2/87 |
| New Orleans (NOR) | 1902.6 | — | 266.8 | 0.28225 (±0.00000) Rank: 17/87 |
0.39467 (±0.00000) Rank: 13/87 |
| San Francisco (SF) | 1978.4 | — | 376.4 | 0.24199 (±0.00000) Rank: 1/87 |
0.39055 (±0.00000) Rank: 1/87 |
| Singapore (SG) | 1947.0 | — | 323.6 | 0.35063 (±0.00000) Rank: 5/87 |
0.47943 (±0.00000) Rank: 3/87 |
| Sydney (SYD) | 2002.9 | — | 354.2 | 0.35284 (±0.00000) Rank: 7/87 |
0.51310 (±0.00000) Rank: 8/87 |
| Tokyo (TOK) | 2026.0 | — | 430.1 | 0.61667 (±0.00000) Rank: 3/87 |
0.76005 (±0.00000) Rank: 1/87 |
| Toronto (TOR) | 1999.0 | — | 272.5 | 0.21200 (±0.00000) Rank: 21/87 |
0.38680 (±0.00000) Rank: 17/87 |
| Zurich (ZRH) | 1880.5 | — | 353.1 | 0.23368 (±0.00000) Rank: 33/87 |
0.32337 (±0.00000) Rank: 31/87 |
| Average (Avg) | 1940.6 | — | 349.7 | 0.28345 (±0.00000) Rank: 1/87 |
0.42400 (±0.00000) Rank: 1/87 |
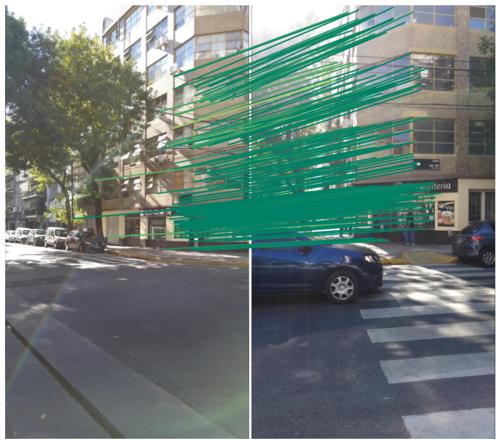
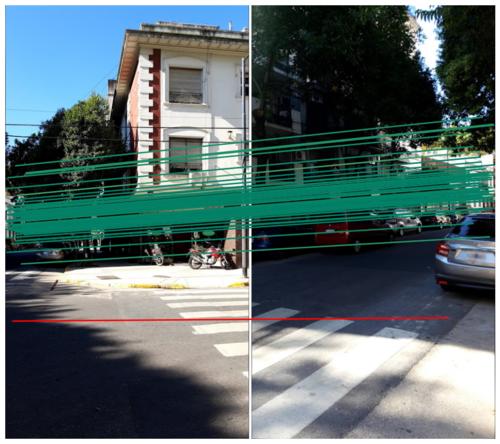
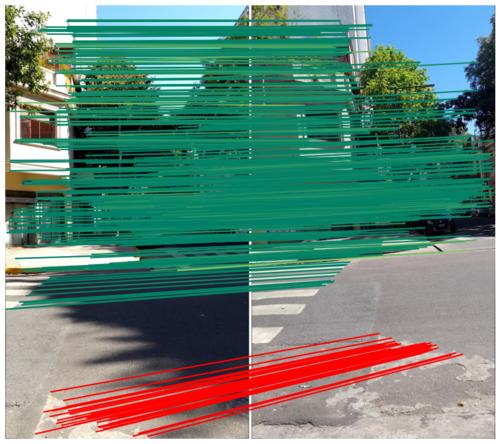
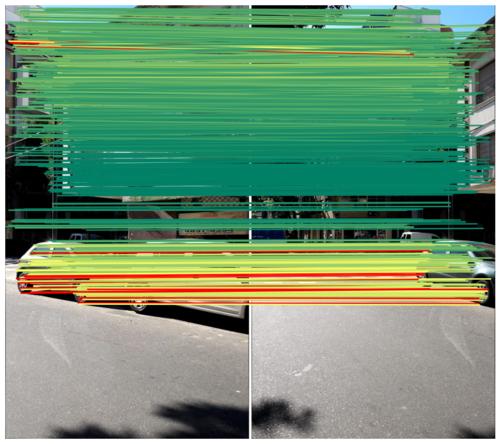
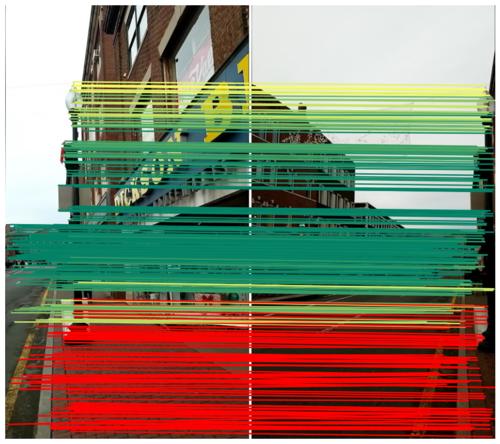
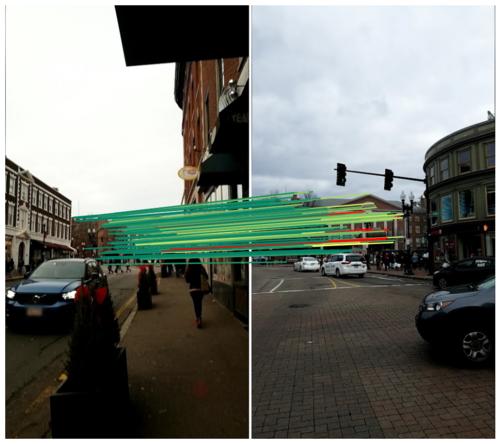
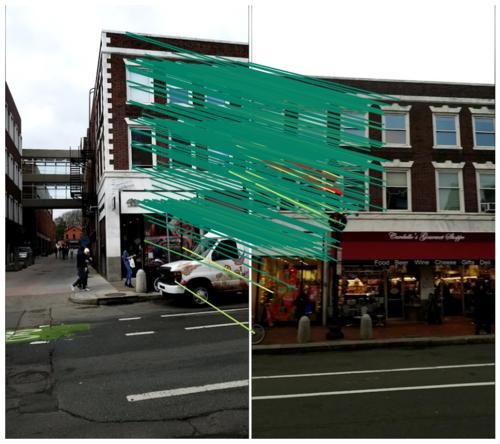
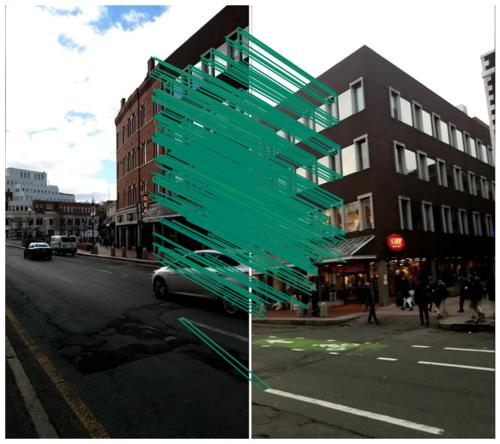
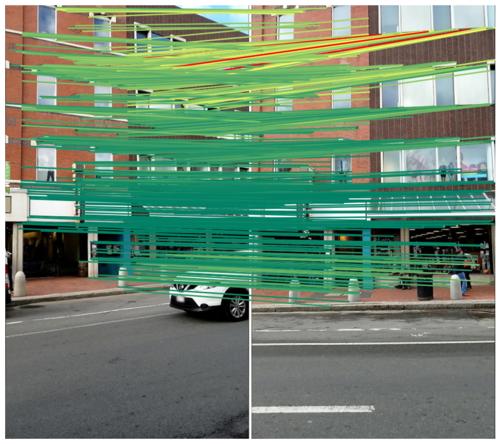
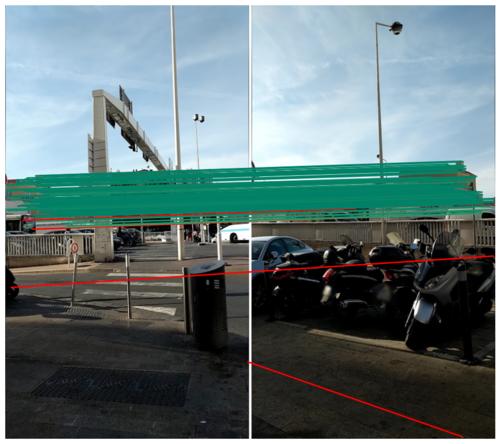
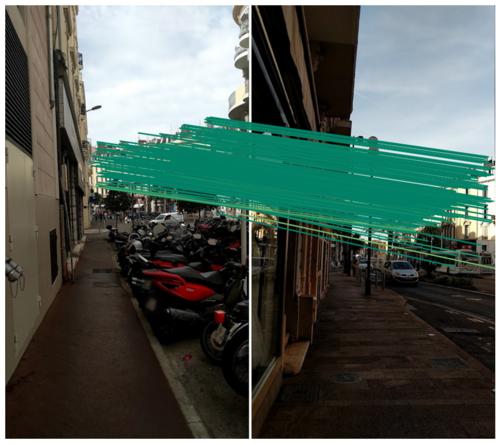
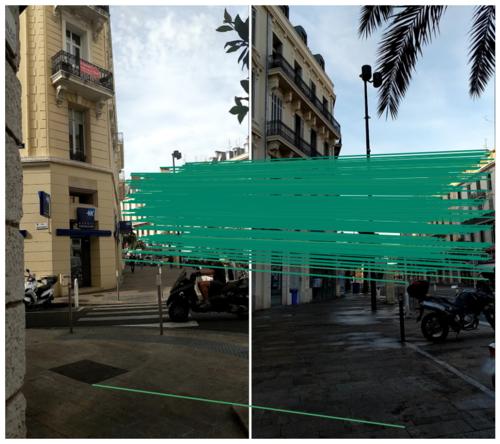
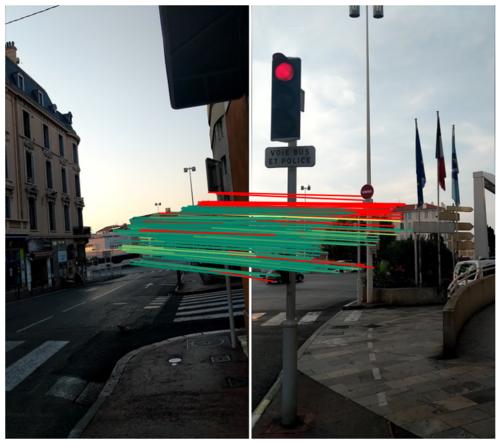
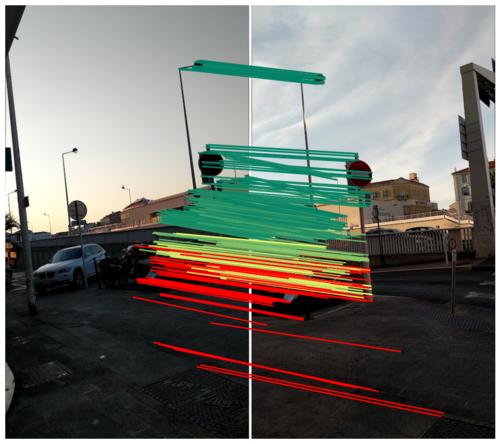
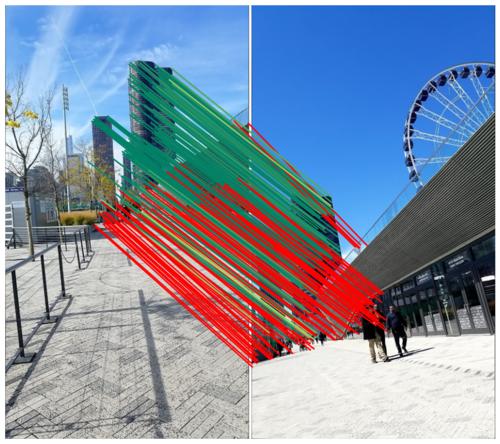
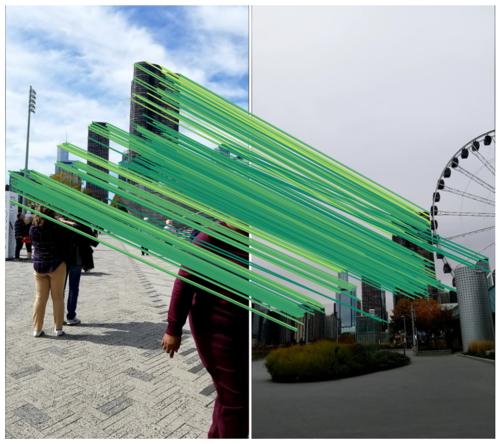
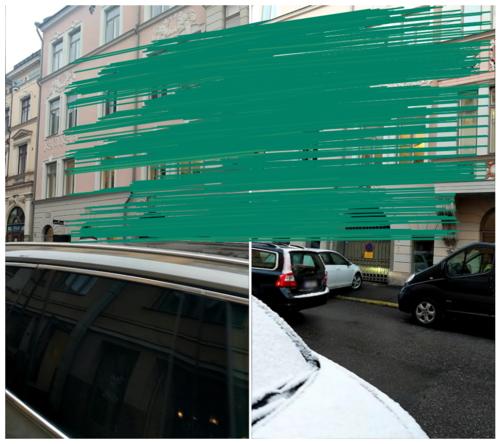
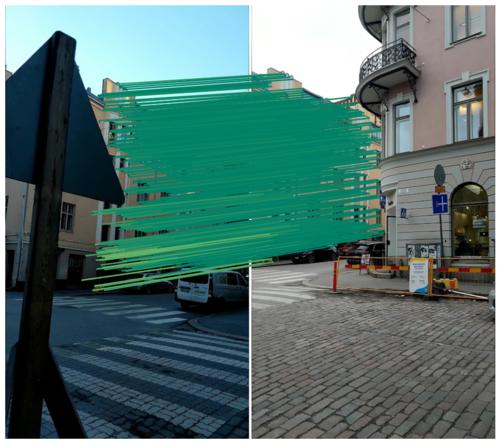
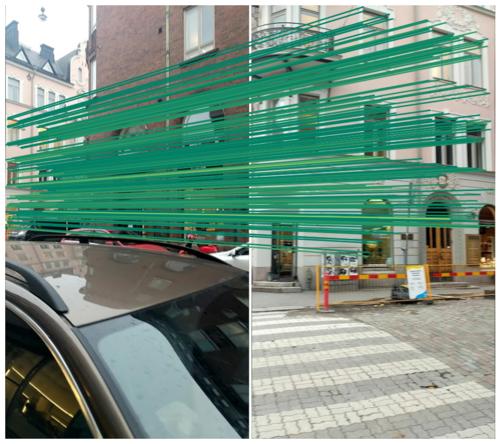
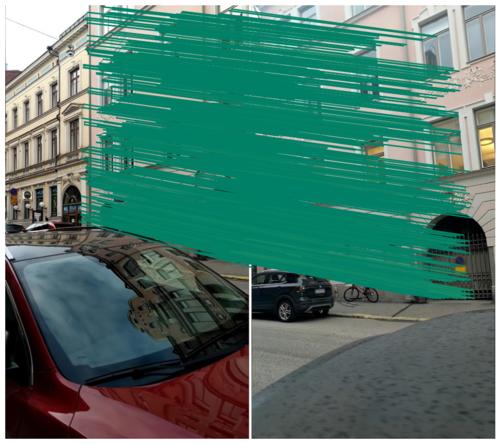
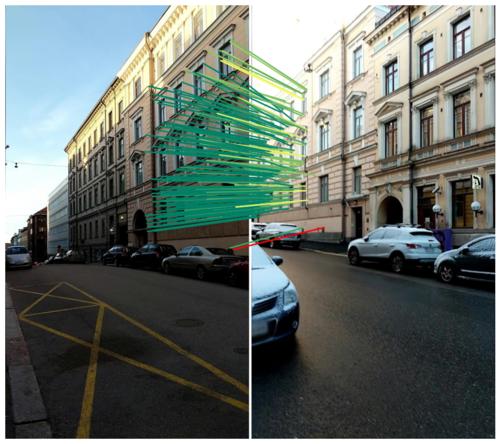
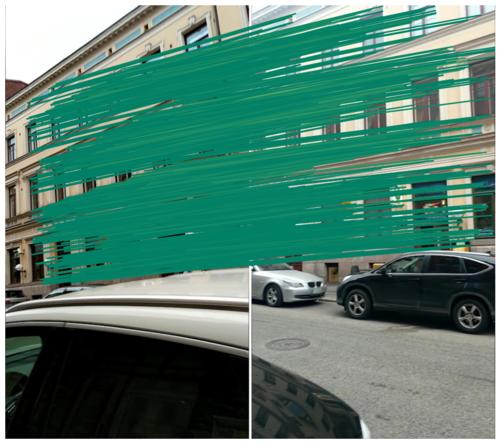
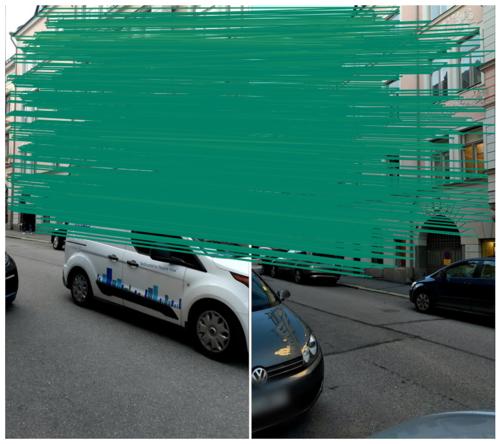
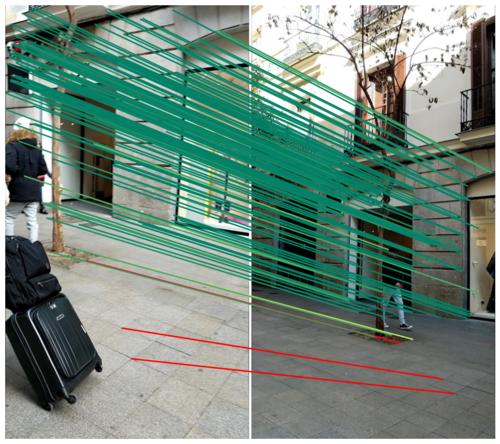
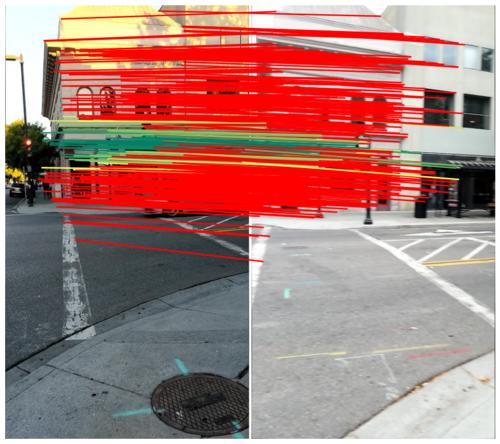
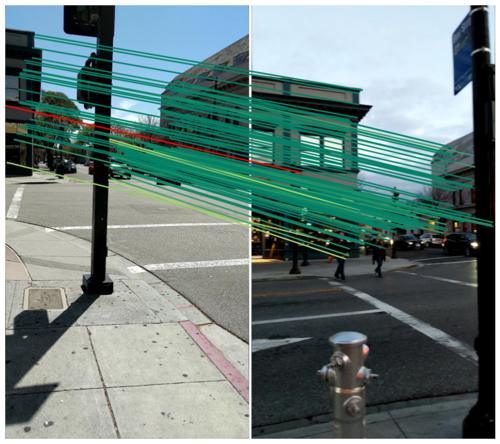
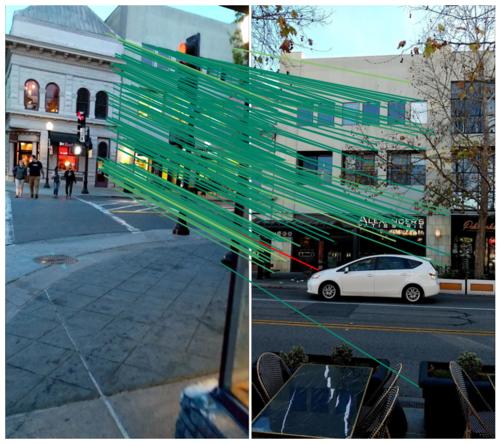
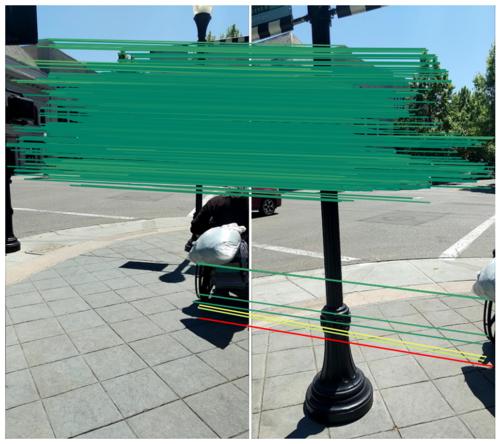
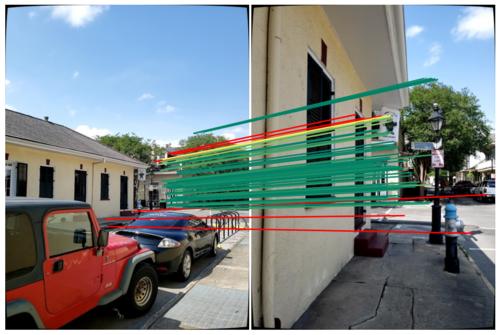
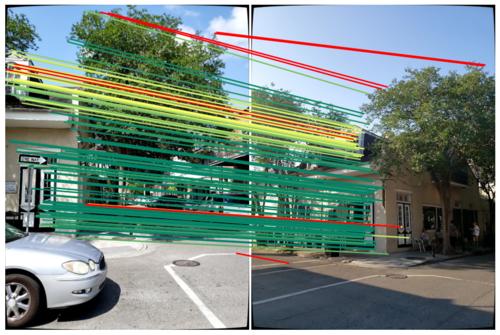
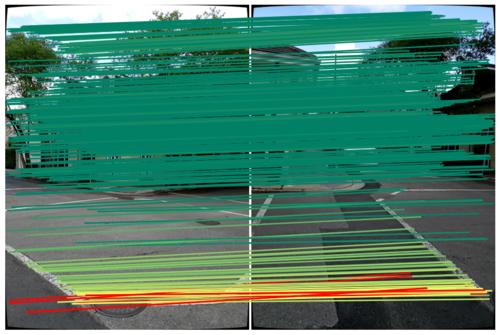
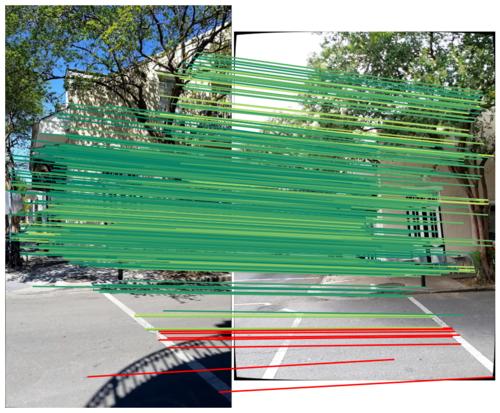
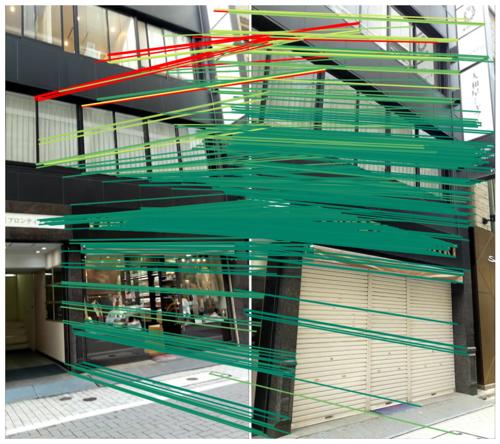
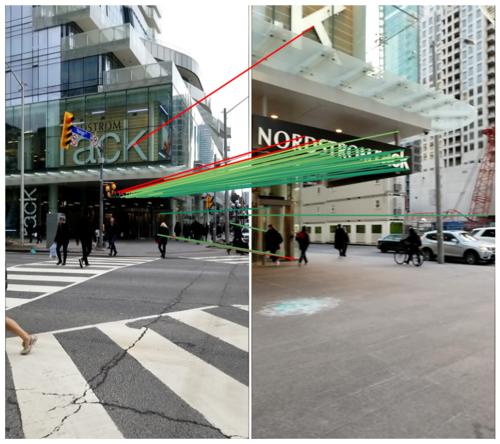
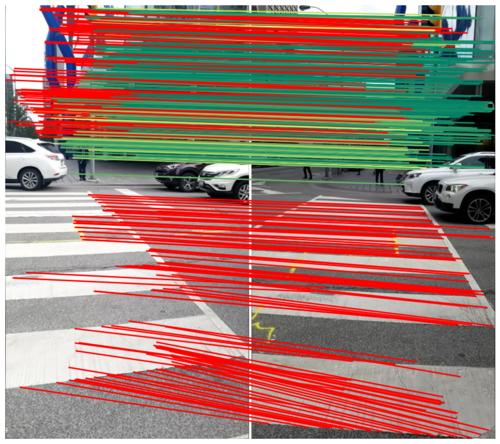
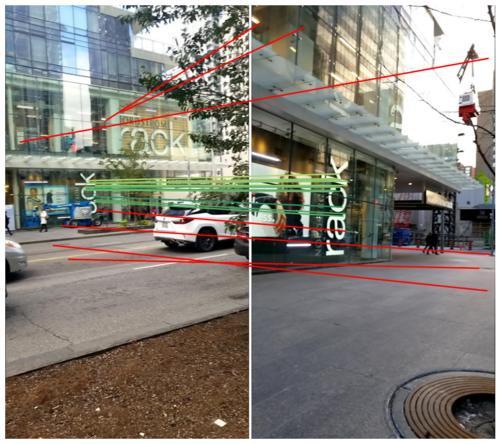
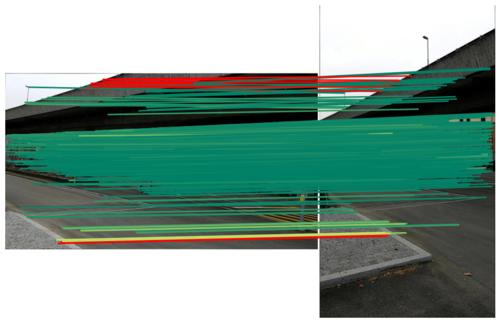
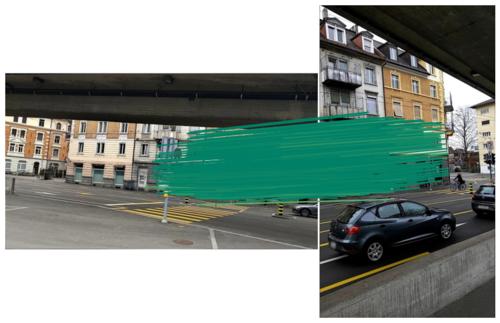
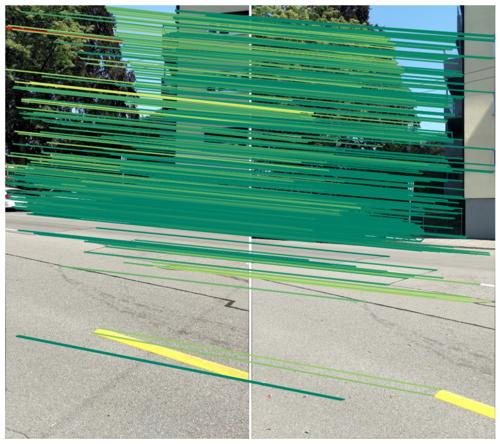
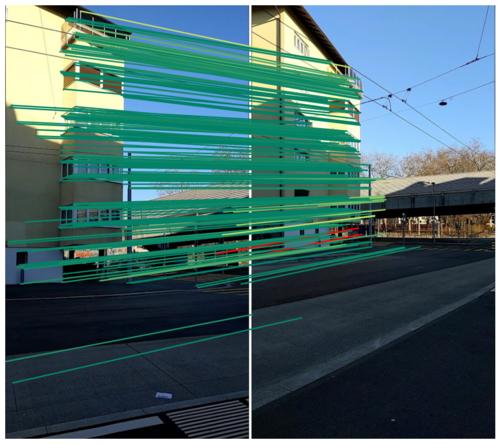
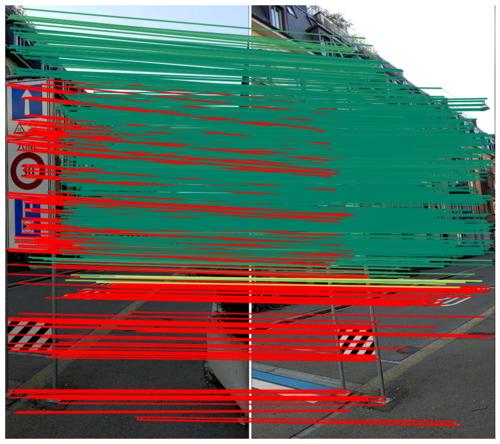
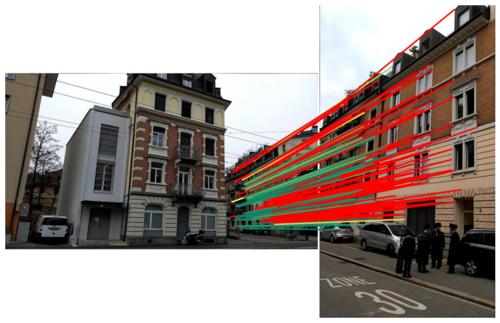
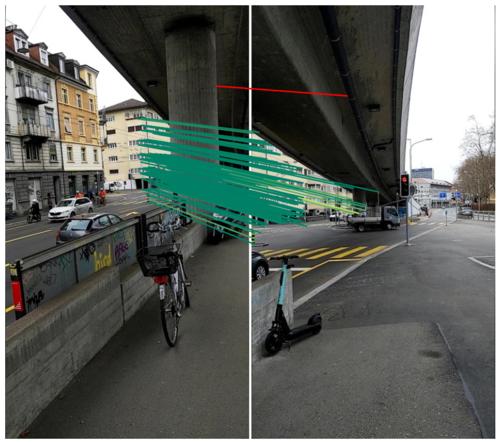
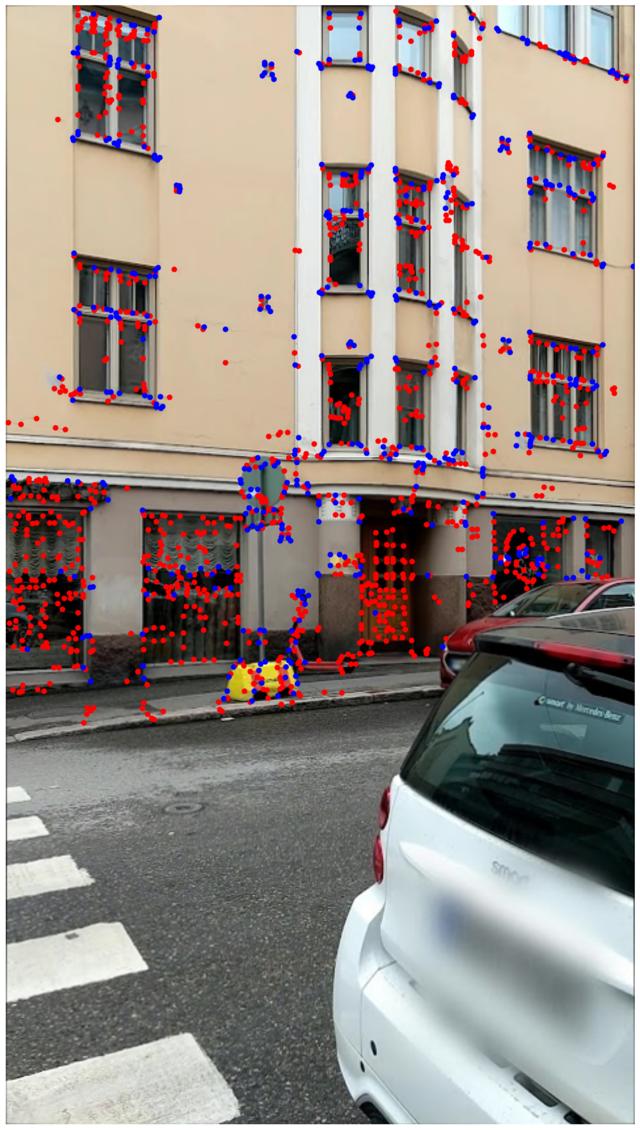
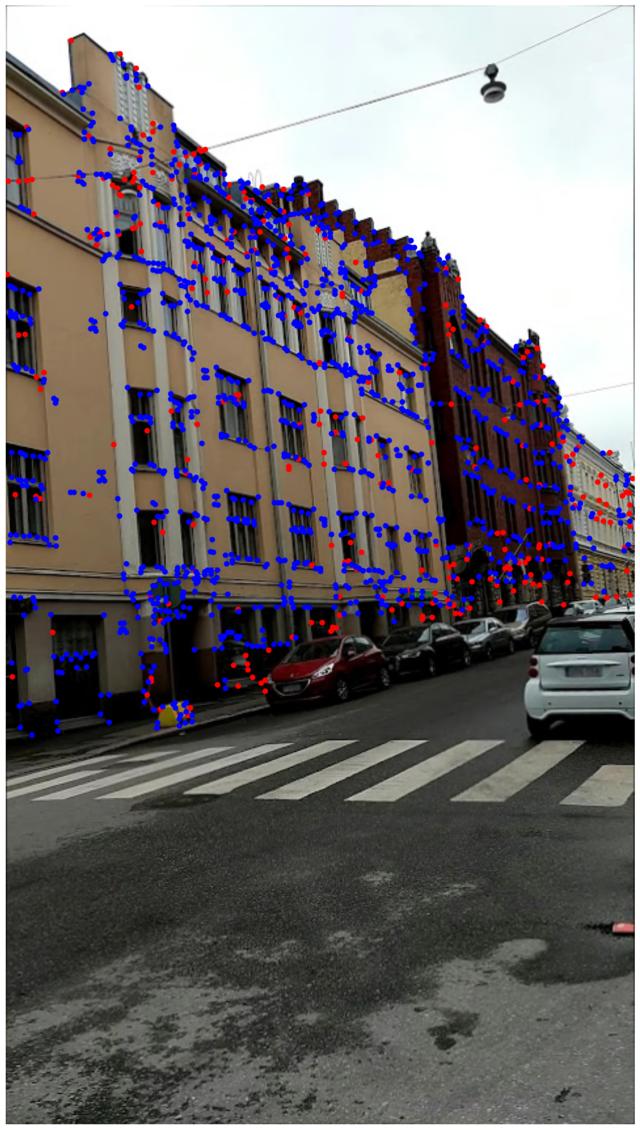
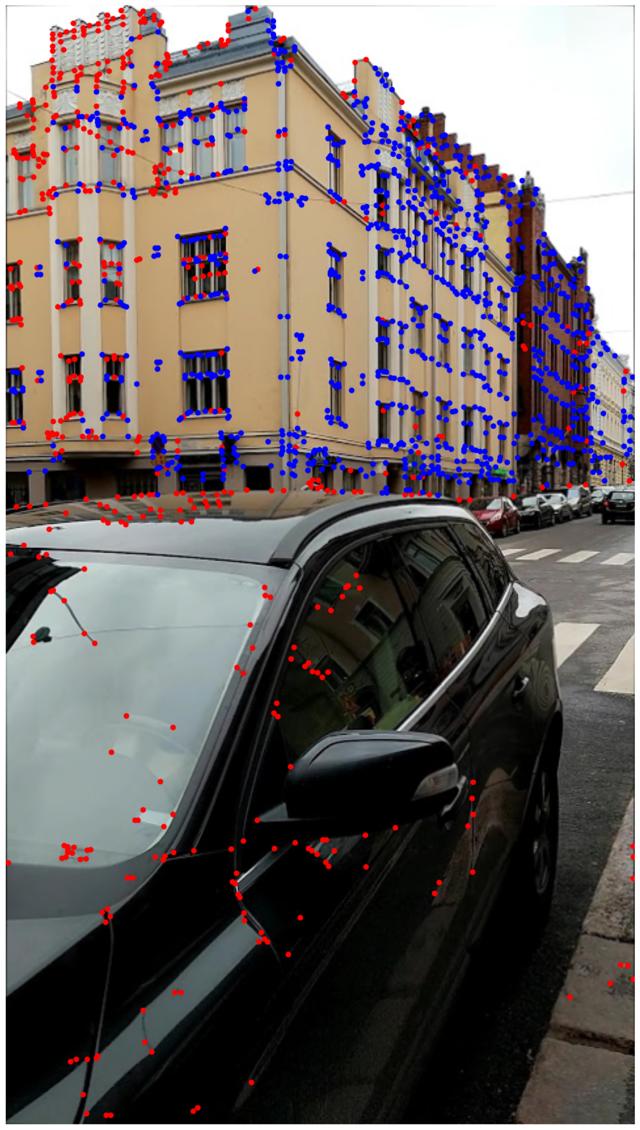
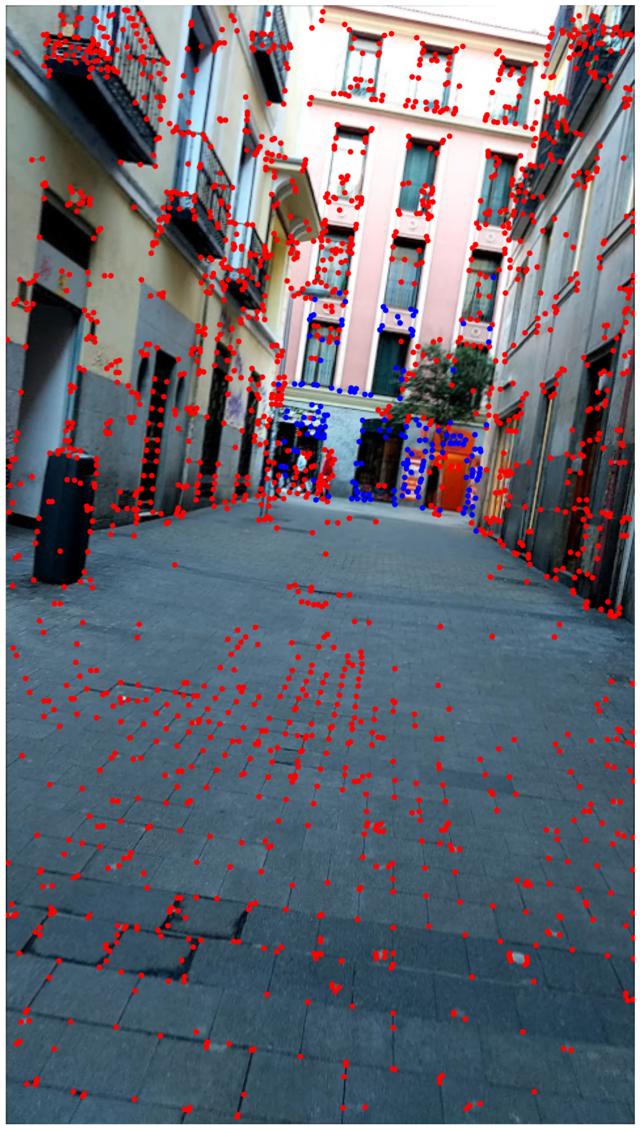
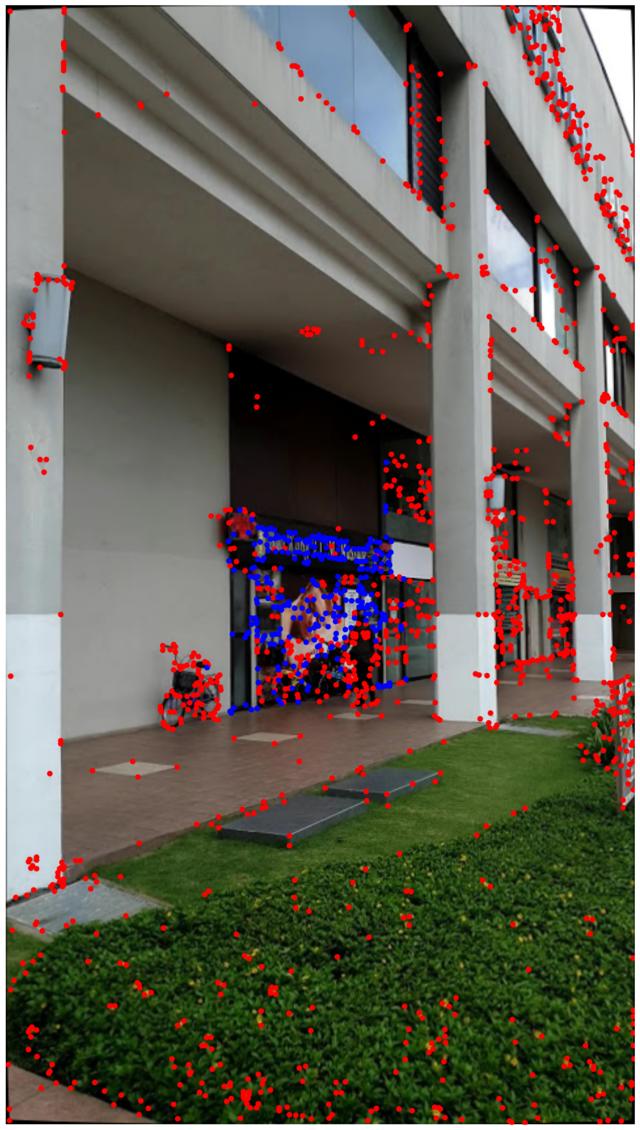
We show the inliers that survive the robust estimation loop (i.e. RANSAC), or those supplied with the submission if using custom matches. As the dataset does not contain depth, we color them based on the symmetric epopilar distance on normalized coordinates: from 0 (green) to 2e-4 (yellow), and in red above it. Note that these occasionally contain false positives.
— Amsterdam —







— Bangkok —





— Barcelona —






— Buenos Aires —






— Cambridge —





— Cannes —





— Chicago —





— Helsinki —


— Madrid —





— Mountain View —



— New Orleans —



— San Francisco —






— Singapore —








— Sydney —






— Tokyo —





— Toronto —







— Zurich —

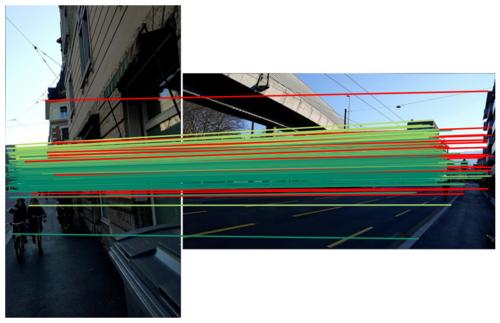

Google Urban dataset / Multiview track
mAA at 10 degrees: N/A (±0.00000 over 1 run(s) / ±0.16249 over 17 scenes)
Rank (per category): 2 (of 87)
| Scene | Features | Matches (input) |
RegistrationRatio (%) | Number of Landmarks |
Track Length | ATE | mAA(50) | mAA(100) |
| AMS | 2048.0 | 246.92 | 93.33 Rank: 11/87 |
1681.51 Rank: 1/87 |
3.937 Rank: 2/87 |
25.30598 Rank: 30/87 |
0.39399 (±0.00000) Rank: 3/87 |
0.51309 (±0.00000) Rank: 4/87 |
| BGK | 1910.9 | 279.57 | 97.60 Rank: 6/87 |
2340.54 Rank: 24/87 |
3.672 Rank: 21/87 |
15.36030 Rank: 49/87 |
0.03754 (±0.00000) Rank: 2/87 |
0.10205 (±0.00000) Rank: 3/87 |
| BCN | 1953.9 | 222.87 | 85.73 Rank: 18/87 |
1429.74 Rank: 4/87 |
3.856 Rank: 4/87 |
27.96672 Rank: 32/87 |
0.15339 (±0.00000) Rank: 6/87 |
0.24928 (±0.00000) Rank: 4/87 |
| BAR | 2027.5 | 192.11 | 88.24 Rank: 10/87 |
1315.92 Rank: 9/87 |
3.464 Rank: 10/87 |
17.58138 Rank: 50/87 |
0.17402 (±0.00000) Rank: 11/87 |
0.28923 (±0.00000) Rank: 8/87 |
| CAM | 1990.8 | 226.06 | 90.40 Rank: 3/87 |
1290.97 Rank: 18/87 |
3.655 Rank: 5/87 |
26.56170 Rank: 27/87 |
0.18322 (±0.00000) Rank: 20/87 |
0.27479 (±0.00000) Rank: 18/87 |
| CAN | 1948.2 | 226.61 | 81.57 Rank: 7/87 |
1000.27 Rank: 7/87 |
3.601 Rank: 8/87 |
24.47988 Rank: 52/87 |
0.09100 (±0.00000) Rank: 12/87 |
0.15414 (±0.00000) Rank: 12/87 |
| CHI | 1884.6 | 196.57 | 84.53 Rank: 37/87 |
669.35 Rank: 14/87 |
3.914 Rank: 41/87 |
46.14297 Rank: 18/87 |
0.08921 (±0.00000) Rank: 31/87 |
0.17497 (±0.00000) Rank: 31/87 |
| HEL | 1710.4 | 414.55 | 93.62 Rank: 33/87 |
2163.61 Rank: 29/87 |
4.184 Rank: 2/87 |
13.62444 Rank: 19/87 |
0.36491 (±0.00000) Rank: 9/87 |
0.49172 (±0.00000) Rank: 11/87 |
| MAD | 1887.9 | 149.89 | 91.72 Rank: 9/87 |
1403.18 Rank: 21/87 |
3.400 Rank: 4/87 |
7.18222 Rank: 44/87 |
0.11017 (±0.00000) Rank: 4/87 |
0.22581 (±0.00000) Rank: 2/87 |
| MTV | 1891.7 | 227.95 | 92.83 Rank: 11/87 |
1449.19 Rank: 25/87 |
3.977 Rank: 5/87 |
17.07965 Rank: 37/87 |
0.29565 (±0.00000) Rank: 12/87 |
0.42830 (±0.00000) Rank: 13/87 |
| NOR | 1902.6 | 173.50 | 91.66 Rank: 3/87 |
1307.55 Rank: 12/87 |
3.591 Rank: 4/87 |
14.12292 Rank: 45/87 |
0.35968 (±0.00000) Rank: 3/87 |
0.45576 (±0.00000) Rank: 2/87 |
| SF | 1978.4 | 248.39 | 96.53 Rank: 10/87 |
1787.63 Rank: 13/87 |
3.802 Rank: 8/87 |
20.93364 Rank: 36/87 |
0.34534 (±0.00000) Rank: 2/87 |
0.48811 (±0.00000) Rank: 2/87 |
| SG | 1947.0 | 203.01 | 82.25 Rank: 3/87 |
1316.31 Rank: 1/87 |
3.564 Rank: 1/87 |
20.07369 Rank: 51/87 |
0.28748 (±0.00000) Rank: 1/87 |
0.37131 (±0.00000) Rank: 1/87 |
| SYD | 2002.9 | 223.16 | 91.42 Rank: 9/87 |
1588.58 Rank: 14/87 |
3.705 Rank: 2/87 |
21.57958 Rank: 35/87 |
0.28332 (±0.00000) Rank: 26/87 |
0.37740 (±0.00000) Rank: 26/87 |
| TOK | 2026.0 | 272.90 | 93.47 Rank: 14/87 |
2099.51 Rank: 17/87 |
3.898 Rank: 5/87 |
14.42326 Rank: 28/87 |
0.67741 (±0.00000) Rank: 9/87 |
0.74951 (±0.00000) Rank: 9/87 |
| TOR | 1999.0 | 168.76 | 90.53 Rank: 4/87 |
1563.52 Rank: 2/87 |
3.293 Rank: 3/87 |
18.27214 Rank: 41/87 |
0.21299 (±0.00000) Rank: 7/87 |
0.34747 (±0.00000) Rank: 8/87 |
| ZRH | 1880.5 | 221.12 | 87.84 Rank: 29/87 |
1678.57 Rank: 25/87 |
3.520 Rank: 9/87 |
17.70750 Rank: 20/87 |
0.08751 (±0.00000) Rank: 34/87 |
0.14932 (±0.00000) Rank: 34/87 |
| Avg | 1940.6 | 229.06 | 90.19 Rank: 10/87 |
1534.47 Rank: 16/87 |
3.708 Rank: 4/87 |
20.49400 Rank: 40/87 |
0.24393 (±0.00000) Rank: 2/87 |
0.34366 (±0.00000) Rank: 2/87 |
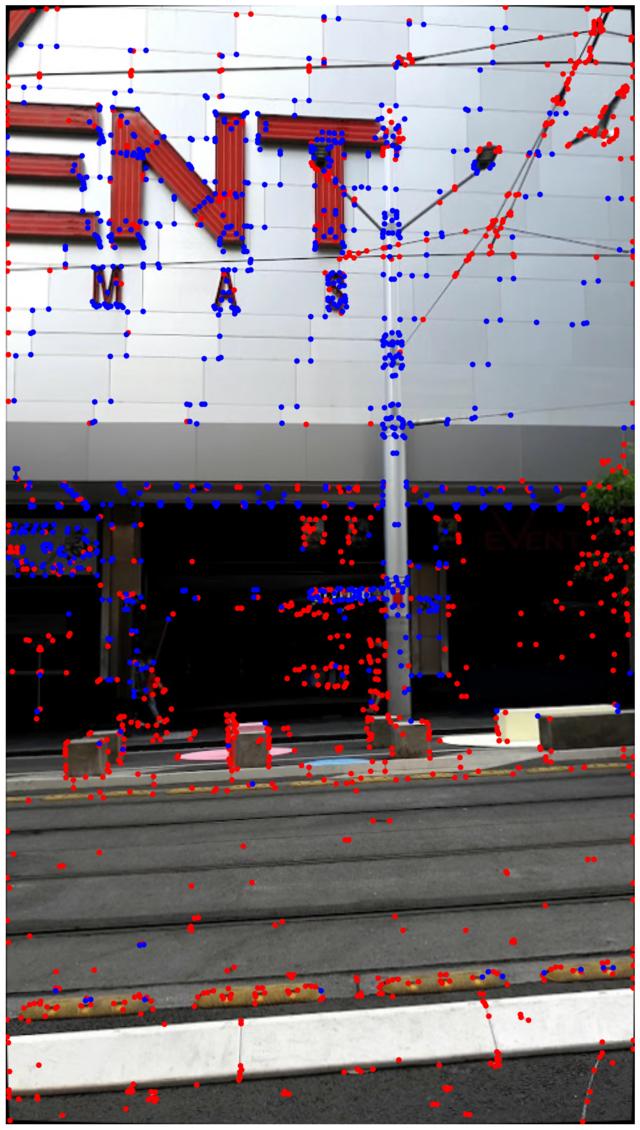
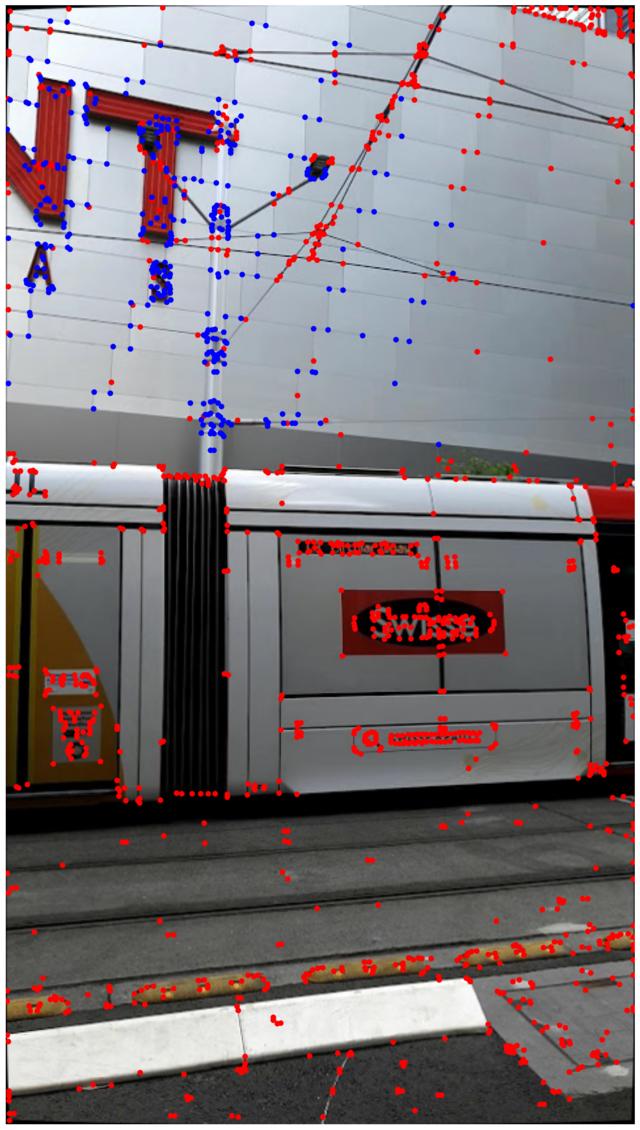
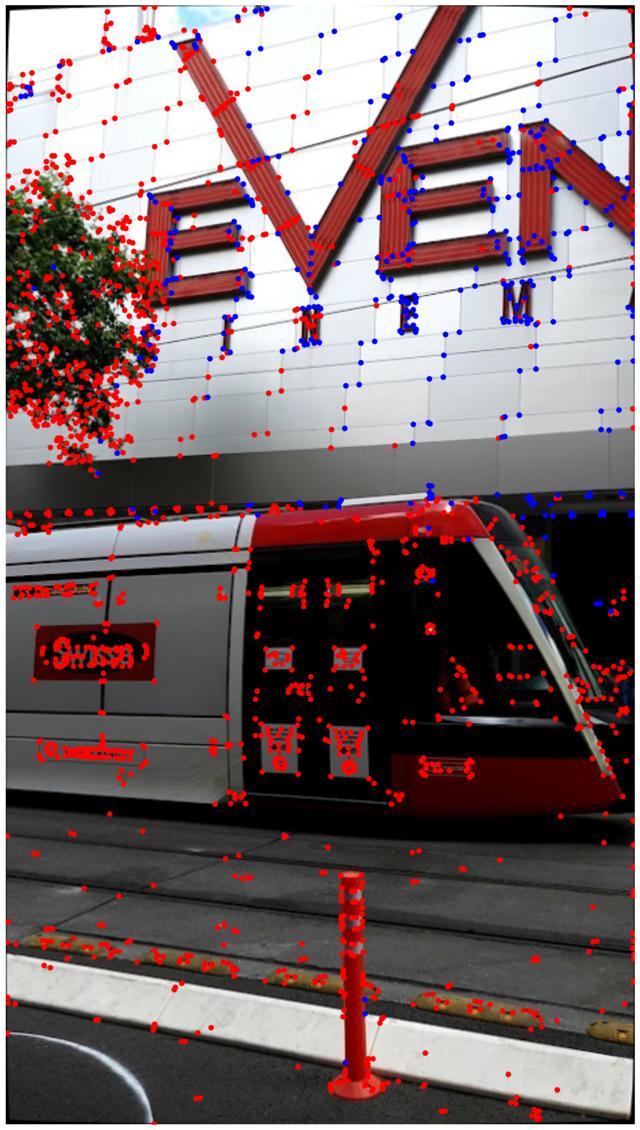
In the multi-view track we reconstruct the scene with Structure-from-Motion (Colmap) with small sets of images. We show the results for one bag of 10 images. Keypoints are drawn in blue if they are part of the model, and in red otherwise.
— Amsterdam —




— Bangkok —


— Barcelona —


— Buenos Aires —



— Cambridge —



— Cannes —
— Chicago —

— Helsinki —


— Madrid —





— Mountain View —


— New Orleans —



— San Francisco —

— Singapore —

— Sydney —
— Tokyo —

— Toronto —






— Zurich —