Submission ID: muaeyysj
Example: Upright SIFT (OpenCV), 8k, lowered detection threshold
Processed: 2021-05-13. Download link: muaeyysjzgdjq9j7igpn9s-rootsift-upright-8k-both-degensac.json
This page ranks the submission against all others using the same number of keypoints, regardless of descriptor size. Please hover over table headers for descriptions on metrics and full scene names.
- Phototourism dataset: Stereo track / Multiview track
- Prague Parks dataset: Stereo track / Multiview track
- Google Urban dataset: Stereo track / Multiview track
Metadata
- Authors: (contact)
- Keypoint: sift-lowth
- Descriptor: rootsift-upright (128 float32: 512 bytes)
- Number of features: 8000
- Summary: SIFT with 8000 features, using the built-in matcher (bidirectional filter with the both strategy, optimal inlier and ratio test thresholds) with DEGENSAC, and setting keypoint orientation to a constant value to increase performance. The detection threshold is lowered in order to extract as many features as possible.
- Paper: N/A
- Website: https://opencv.org
- Processing date: 2021-05-13
Phototourism dataset / Stereo track
mAA at 10 degrees: 0.51220 (±0.00000 over 1 run(s) / ±0.13704 over 9 scenes)
Rank (per category): 30 (of 51)
| Scene | Features | Matches (raw) |
Matches (final) |
Rep. @ 3 px. | MS @ 3 px. | mAA(5o) | mAA(10o) |
| BM | 7956.0 | 502.8 | 338.7 | 0.521 Rank: 41/51 |
0.960 Rank: 3/51 |
0.25114 (±0.00000) Rank: 22/51 |
0.37908 (±0.00000) Rank: 23/51 |
| FCS | 7838.2 | 571.8 | 409.6 | 0.465 Rank: 31/51 |
0.898 Rank: 20/51 |
0.58135 (±0.00000) Rank: 30/51 |
0.69445 (±0.00000) Rank: 31/51 |
| LMS | 7720.4 | 414.6 | 231.3 | 0.467 Rank: 27/51 |
0.697 Rank: 15/51 |
0.53646 (±0.00000) Rank: 26/51 |
0.65036 (±0.00000) Rank: 27/51 |
| LB | 7937.6 | 414.6 | 260.9 | 0.492 Rank: 33/51 |
0.765 Rank: 15/51 |
0.46594 (±0.00000) Rank: 22/51 |
0.56240 (±0.00000) Rank: 27/51 |
| MC | 7779.7 | 639.6 | 459.2 | 0.549 Rank: 40/51 |
0.971 Rank: 2/51 |
0.40118 (±0.00000) Rank: 22/51 |
0.55197 (±0.00000) Rank: 22/51 |
| MR | 7756.6 | 733.1 | 557.4 | 0.479 Rank: 40/51 |
0.982 Rank: 1/51 |
0.34099 (±0.00000) Rank: 8/51 |
0.45150 (±0.00000) Rank: 12/51 |
| PSM | 7768.5 | 300.5 | 196.8 | 0.407 Rank: 38/51 |
0.673 Rank: 18/51 |
0.12574 (±0.00000) Rank: 35/51 |
0.22070 (±0.00000) Rank: 36/51 |
| SF | 7860.0 | 775.6 | 544.3 | 0.498 Rank: 28/51 |
0.846 Rank: 19/51 |
0.46754 (±0.00000) Rank: 32/51 |
0.59101 (±0.00000) Rank: 33/51 |
| SPC | 7849.4 | 399.9 | 246.4 | 0.501 Rank: 36/51 |
0.818 Rank: 31/51 |
0.37877 (±0.00000) Rank: 35/51 |
0.50828 (±0.00000) Rank: 39/51 |
| Avg | 7829.6 | 528.0 | 360.5 | 0.486 Rank: 35/51 |
0.846 Rank: 10/51 |
0.39434 (±0.00000) Rank: 28/51 |
0.51220 (±0.00000) Rank: 30/51 |
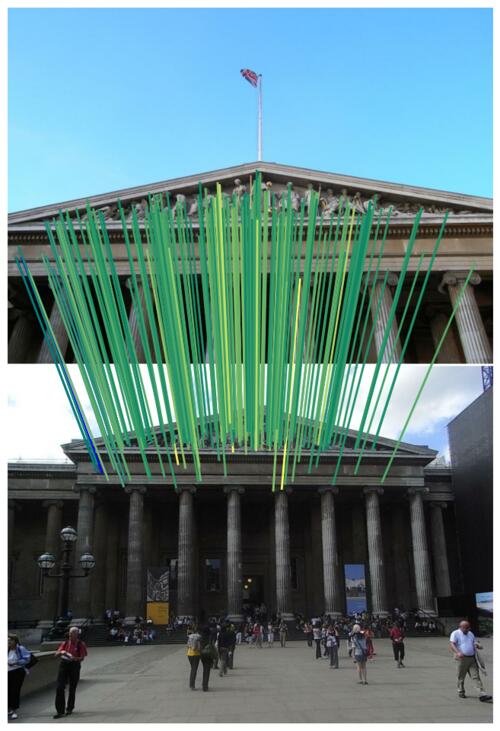
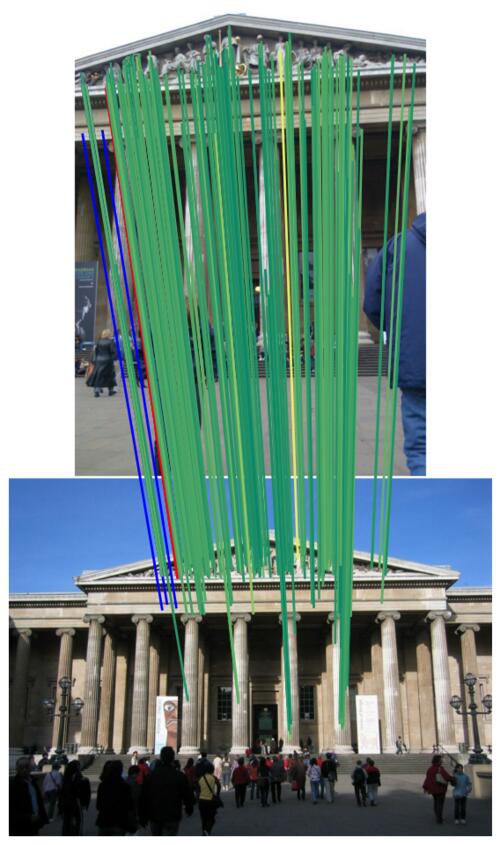
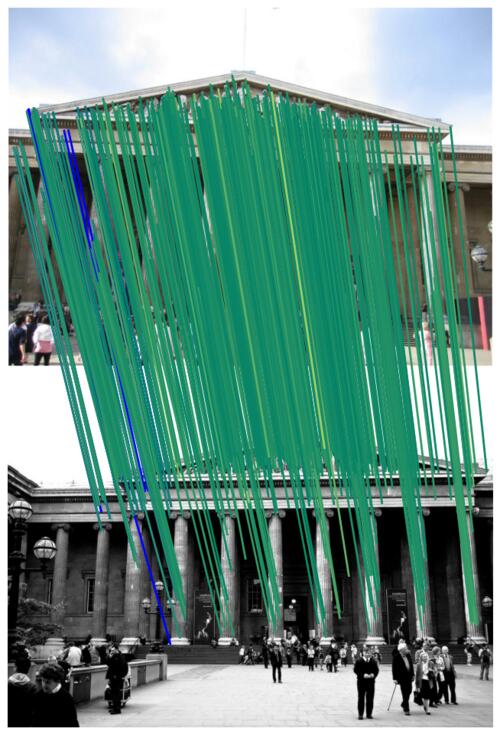
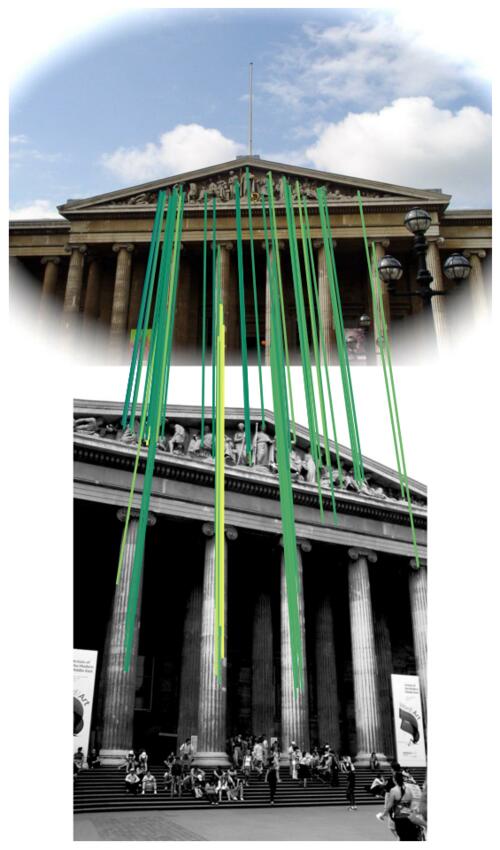
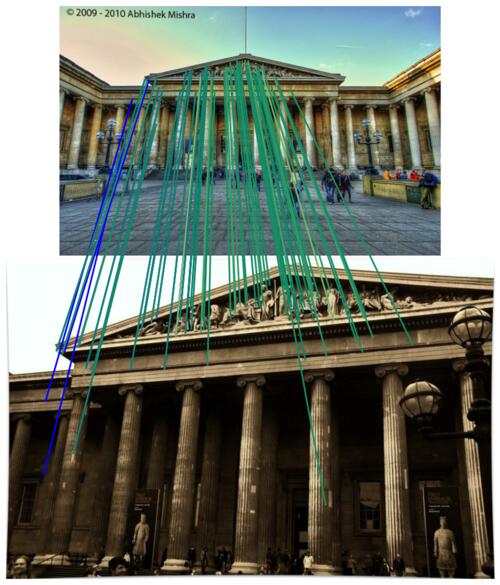
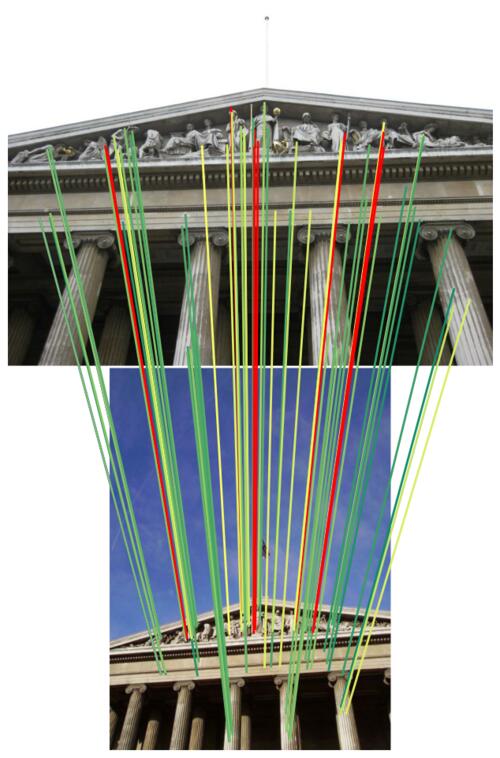
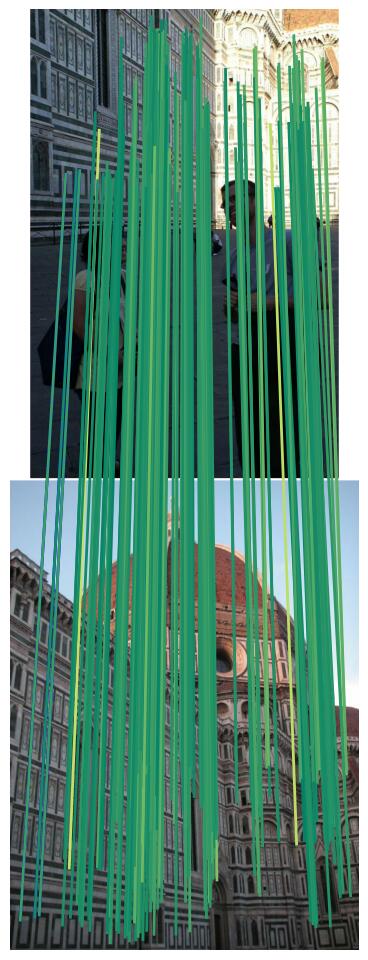
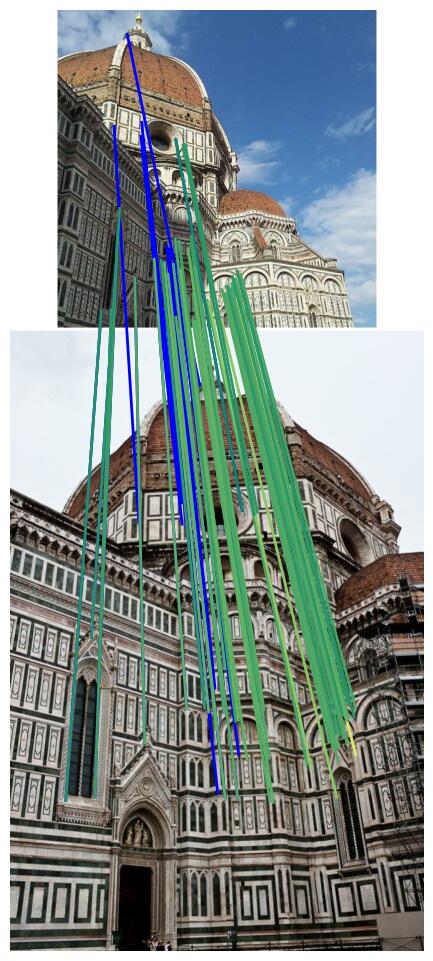
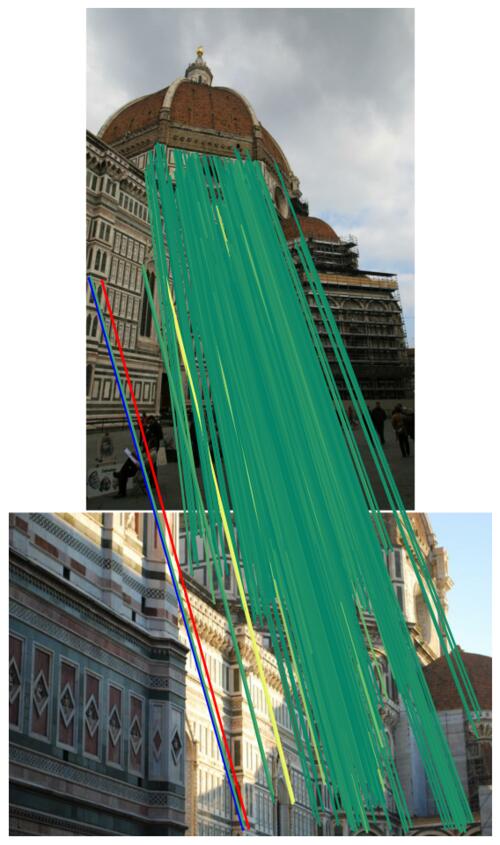
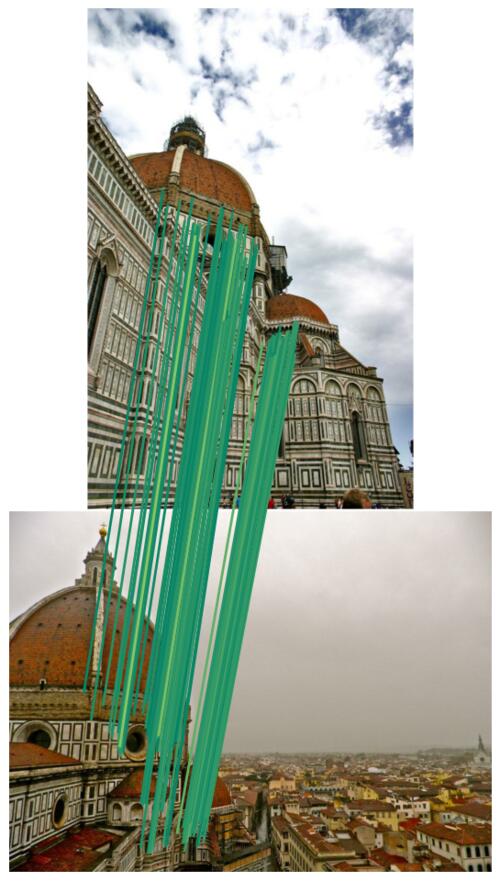
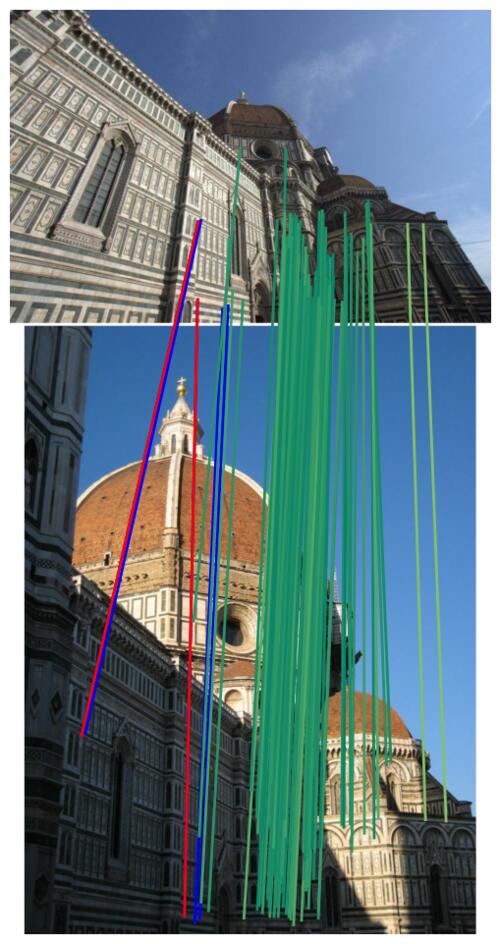
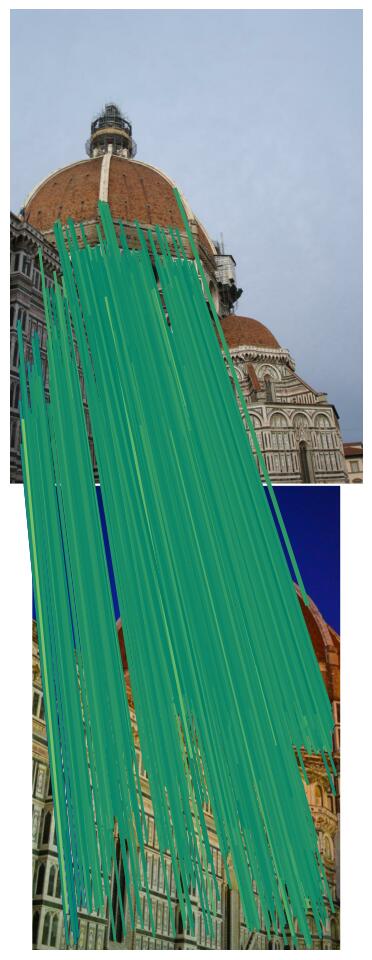
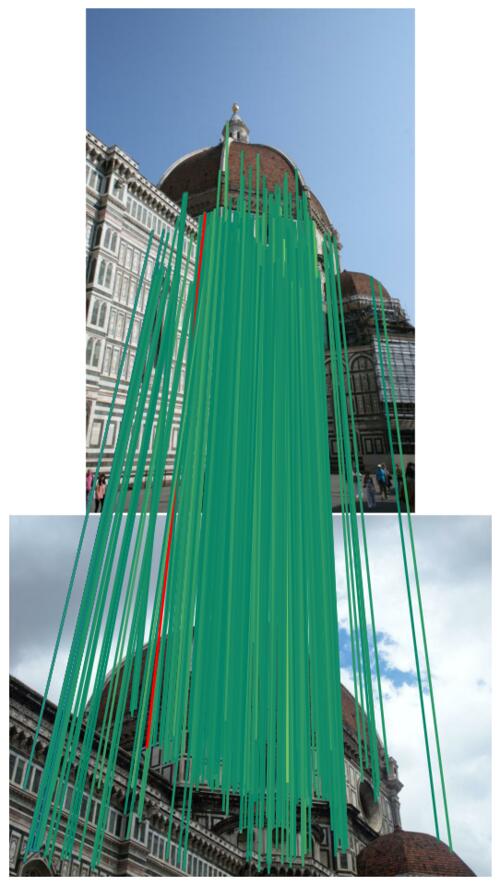
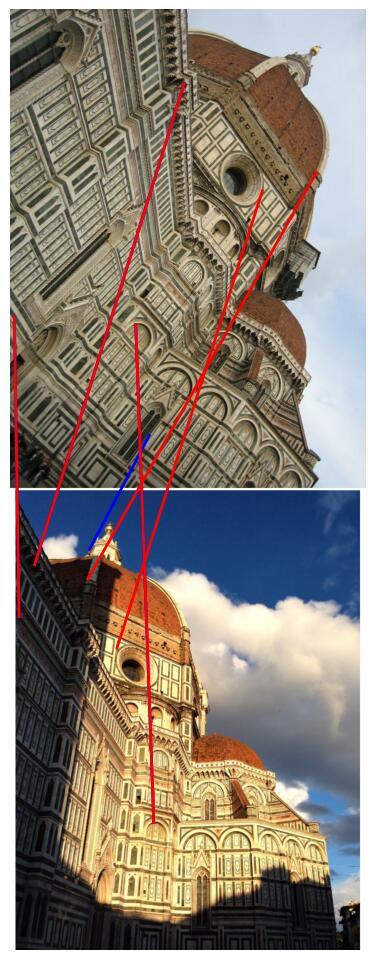
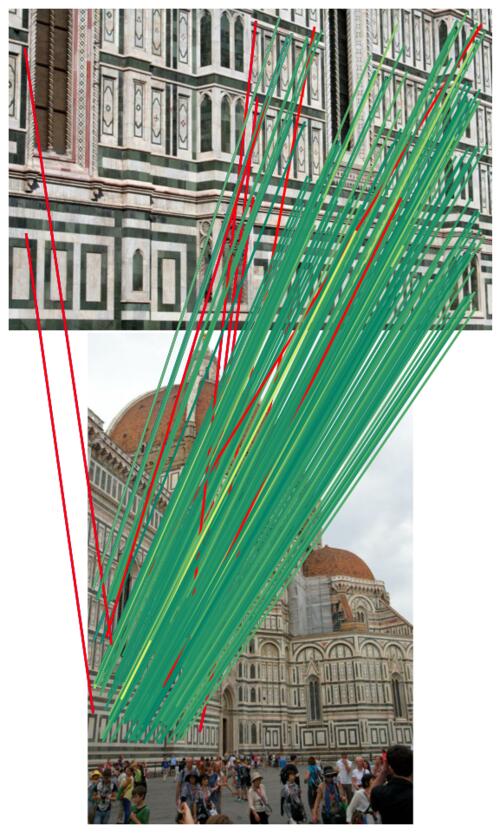
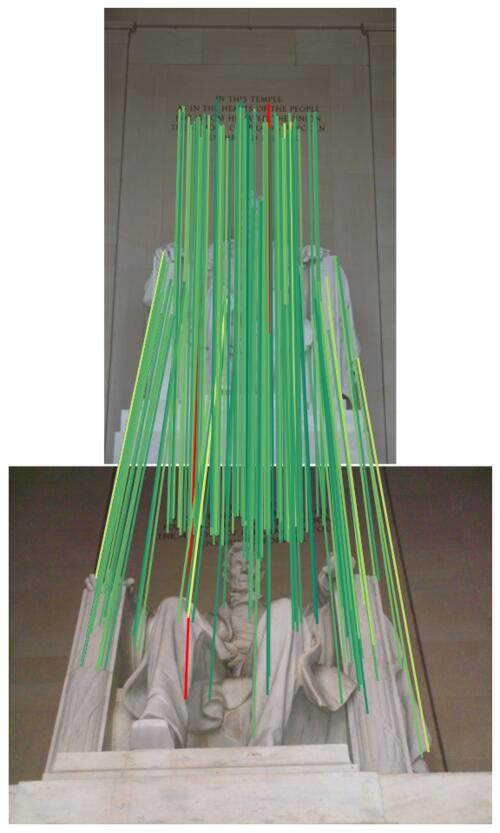
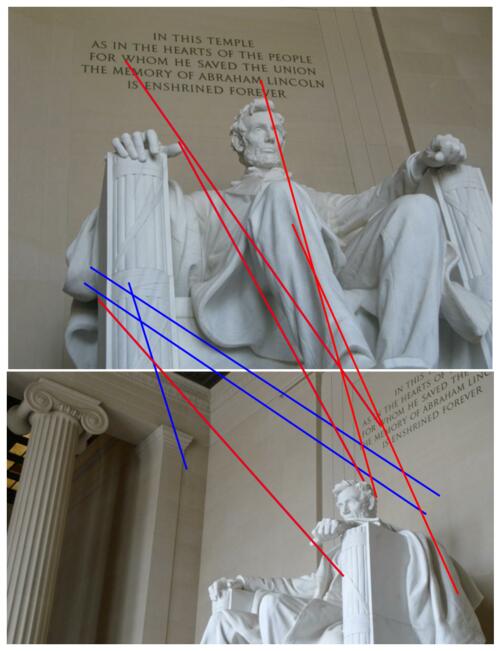
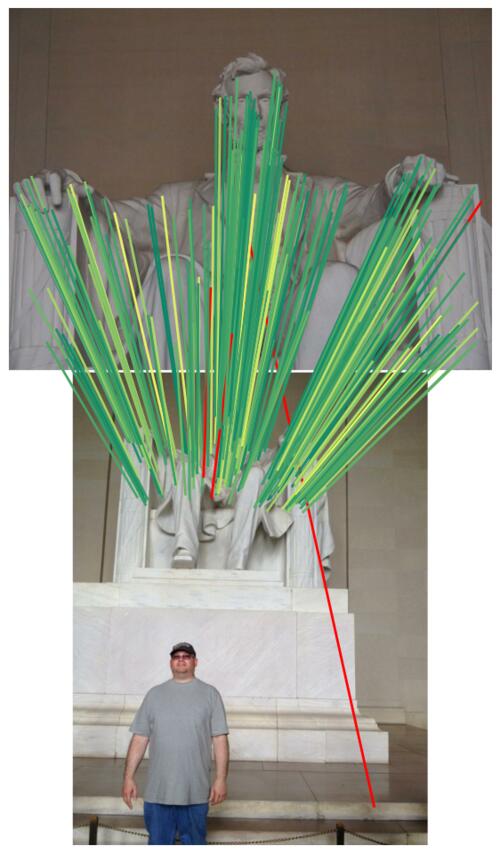
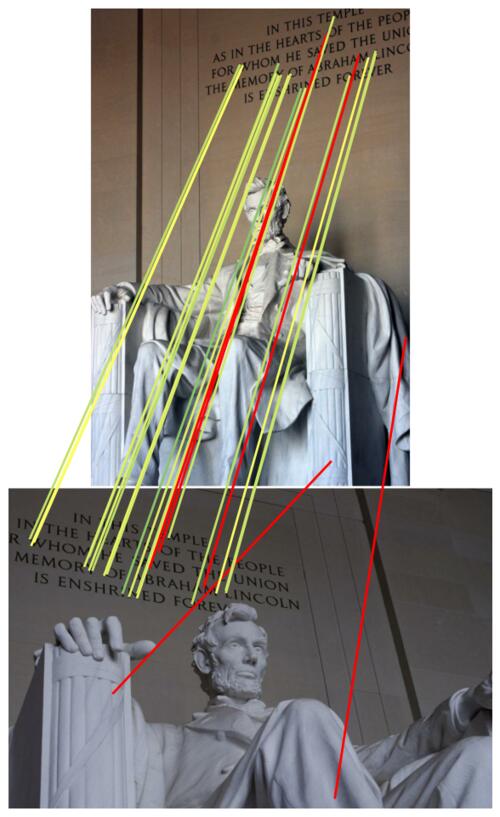
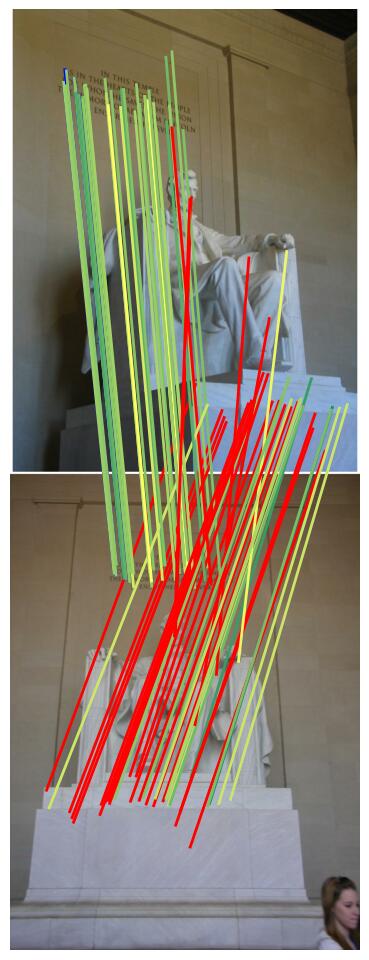
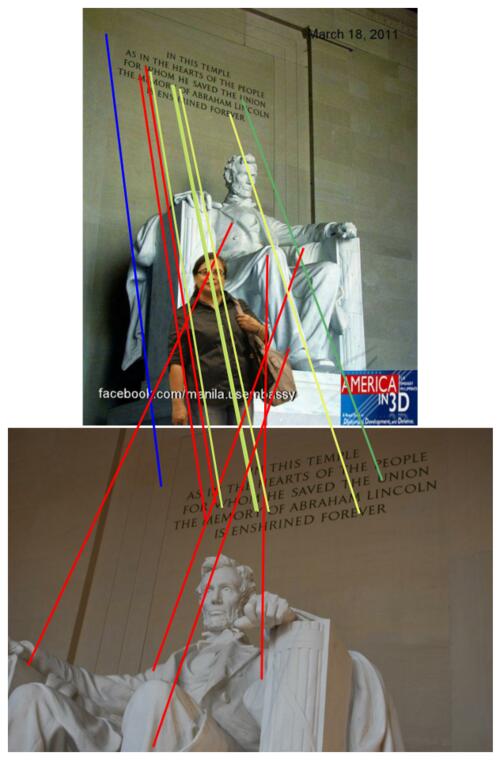
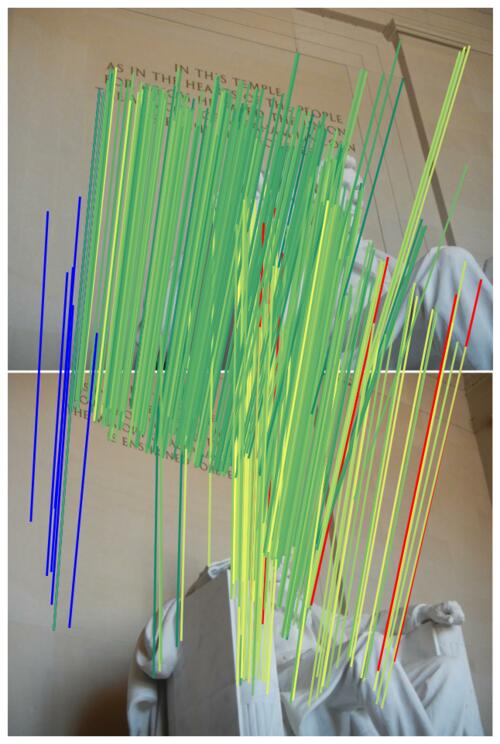
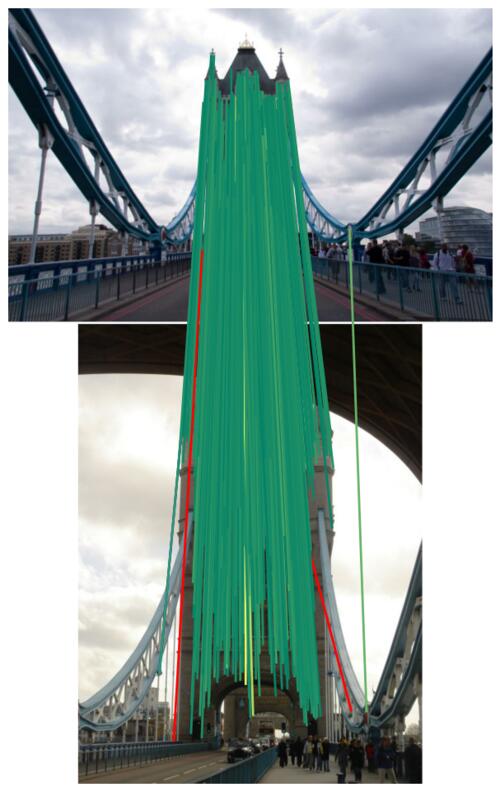
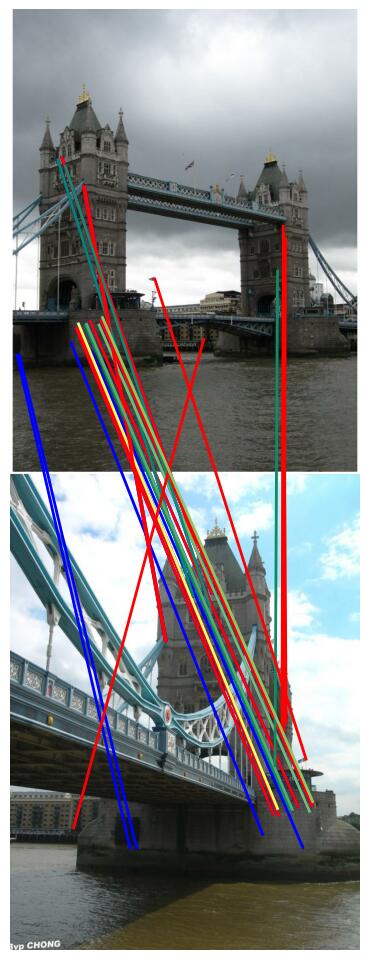
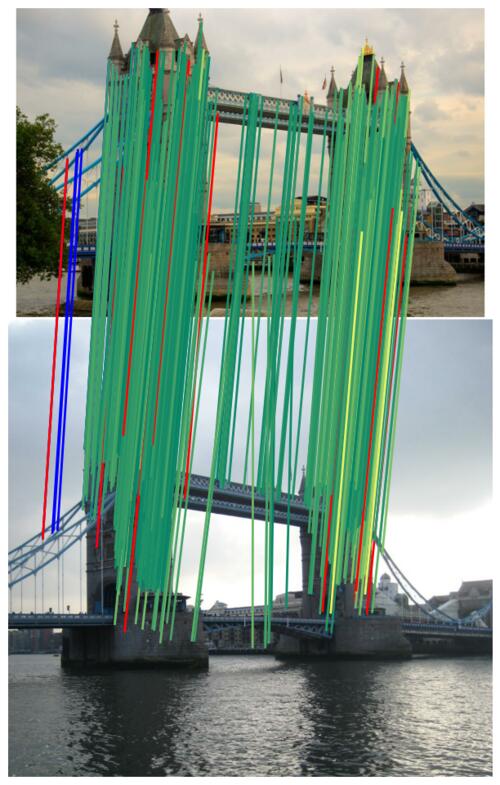
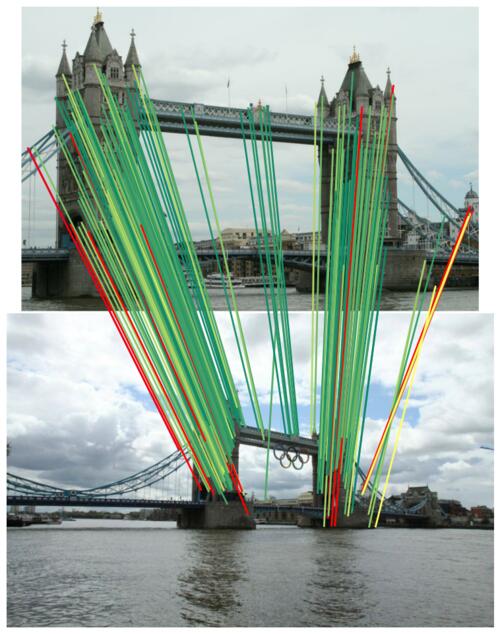
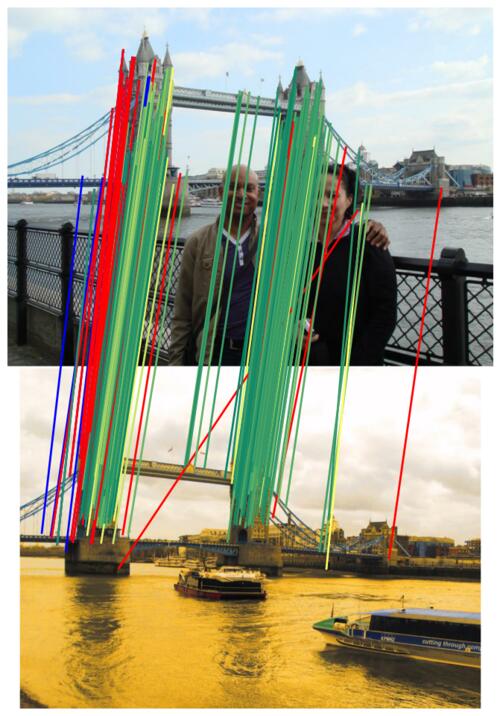
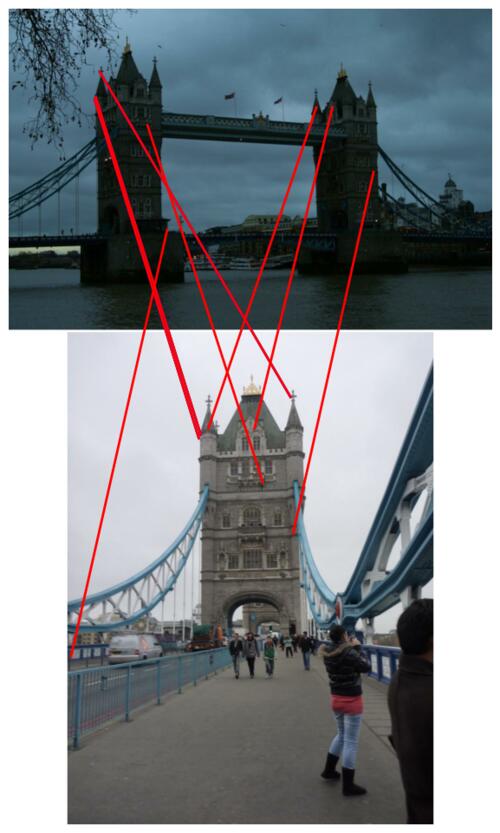
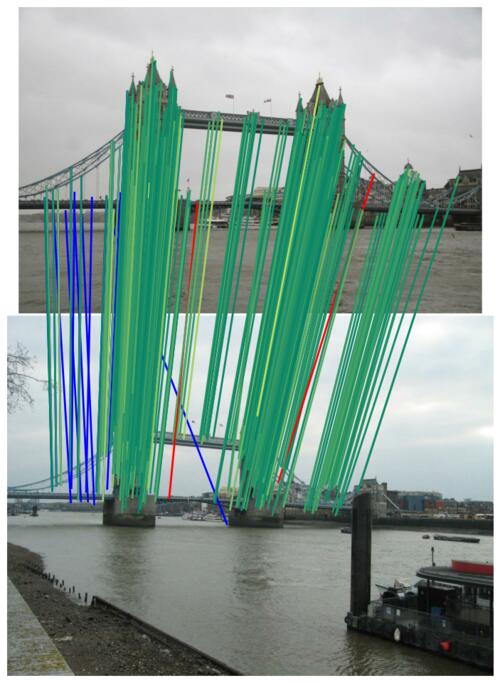
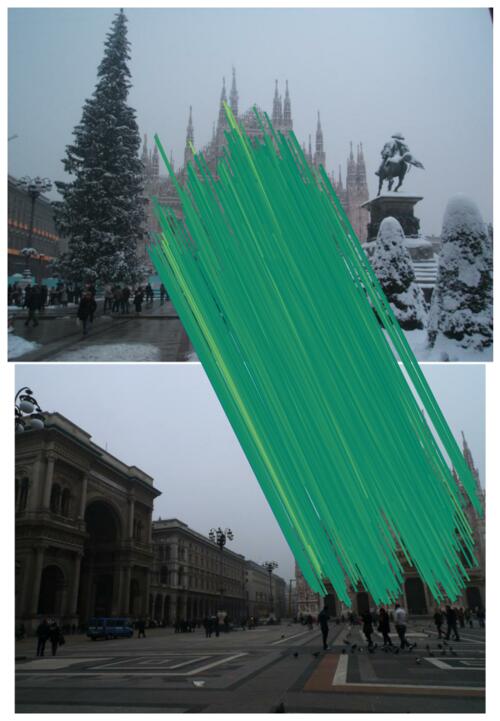
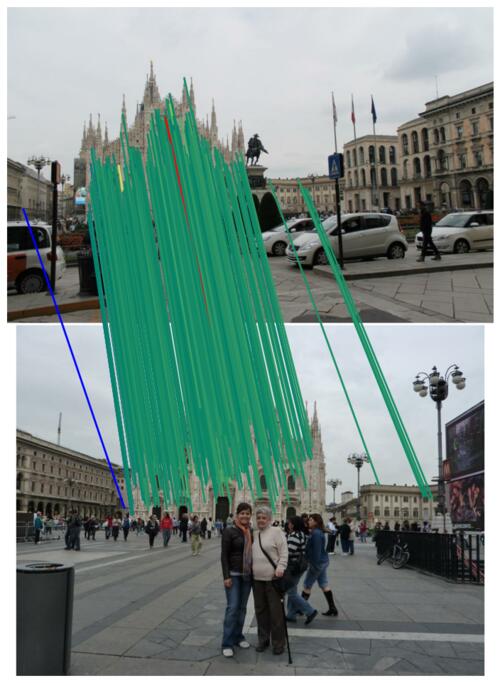
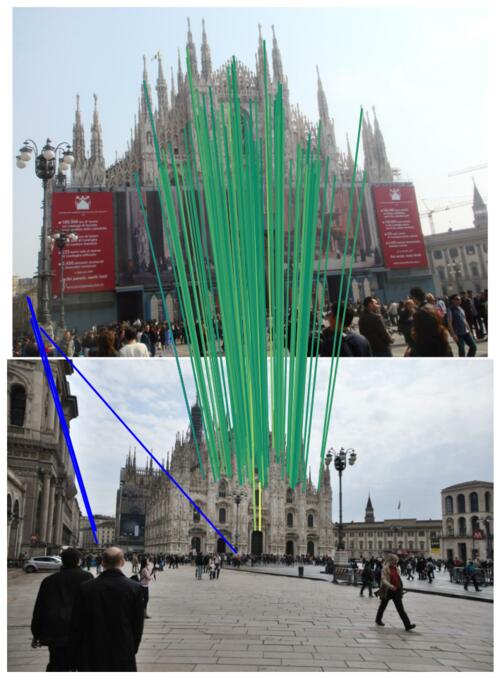
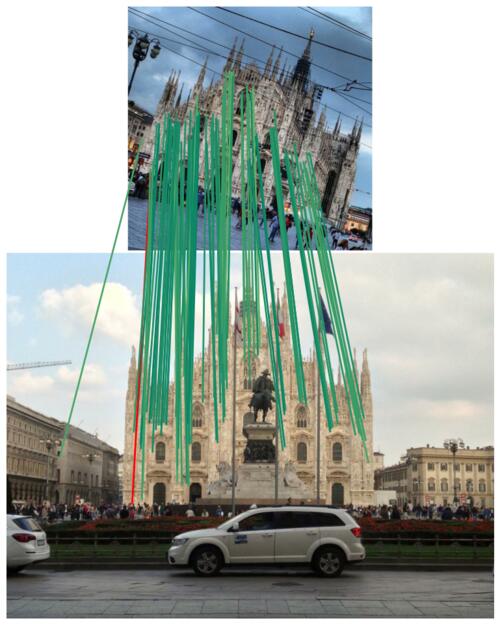
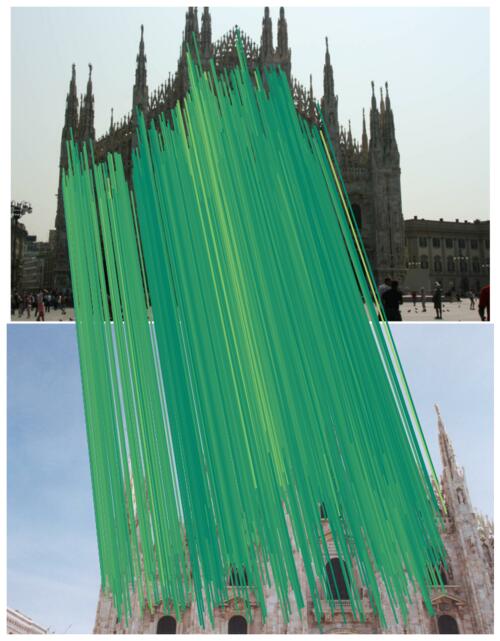
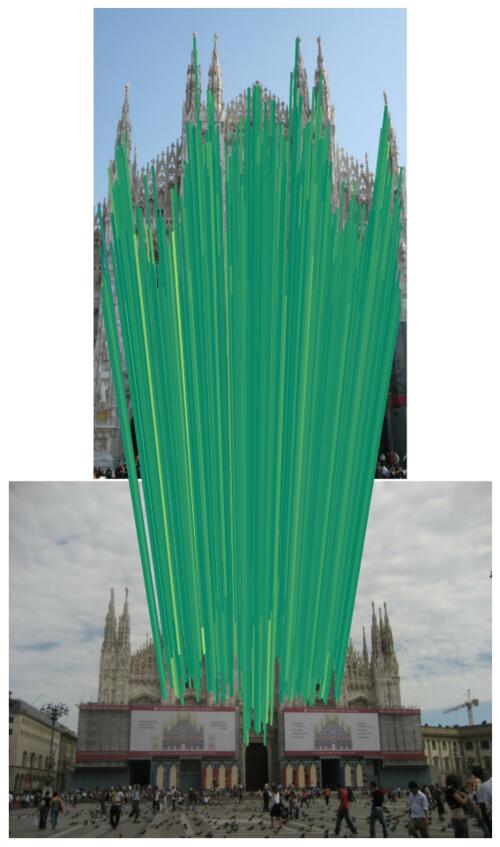
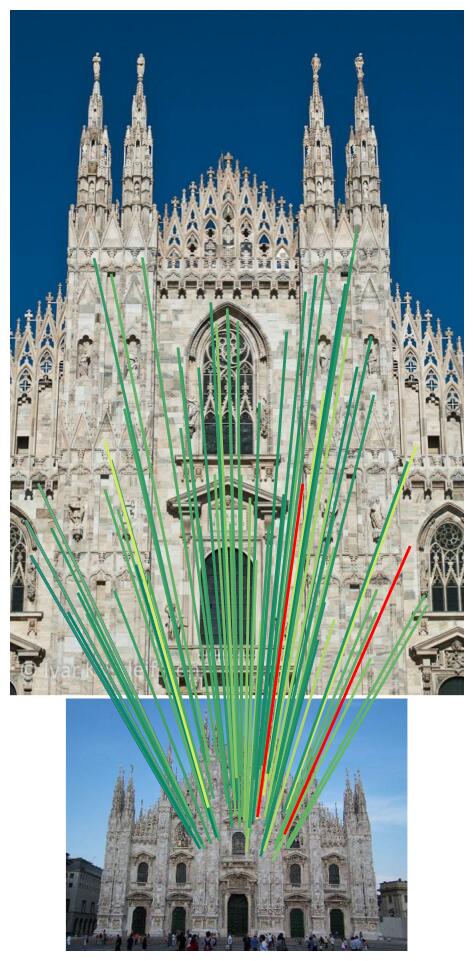
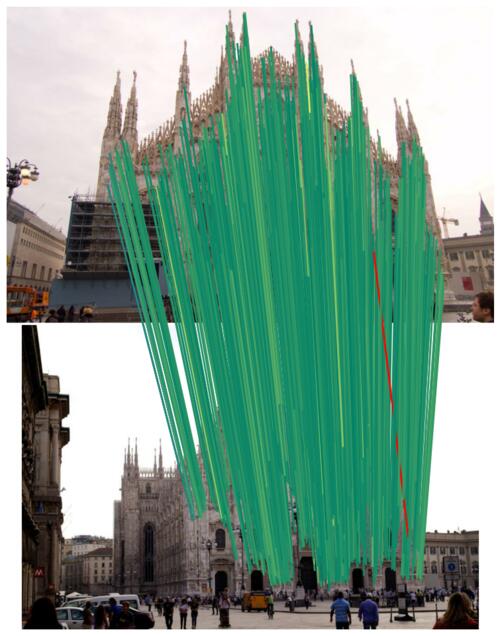
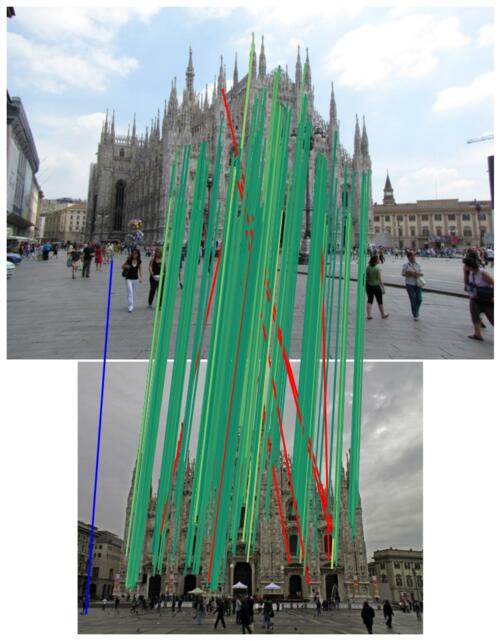
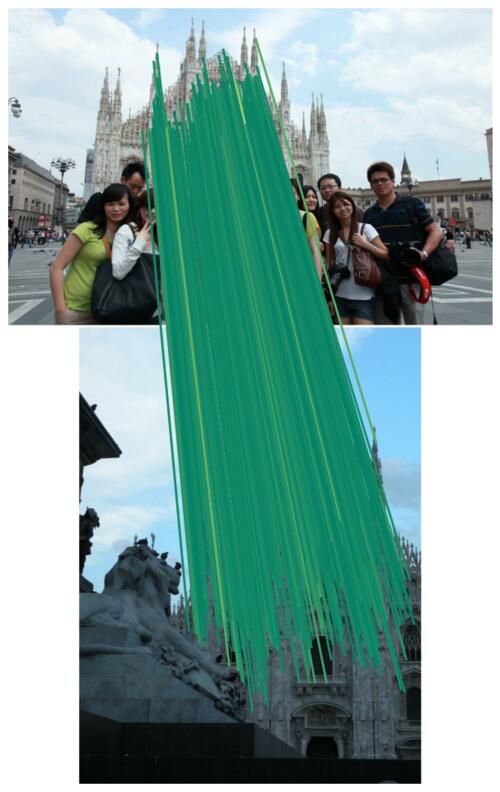
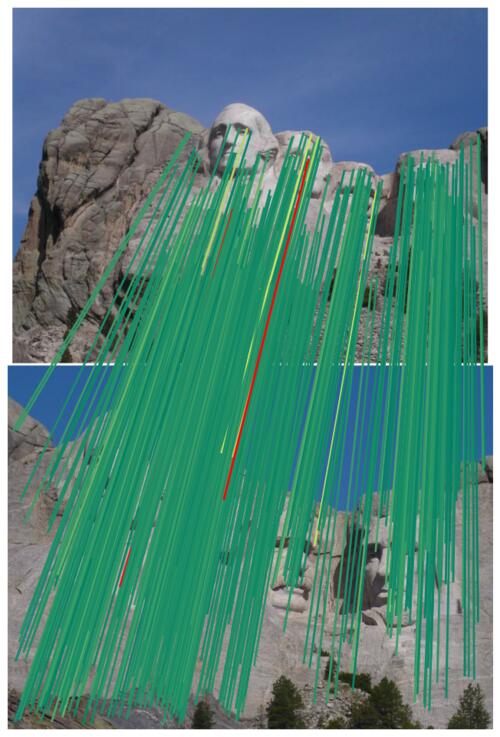
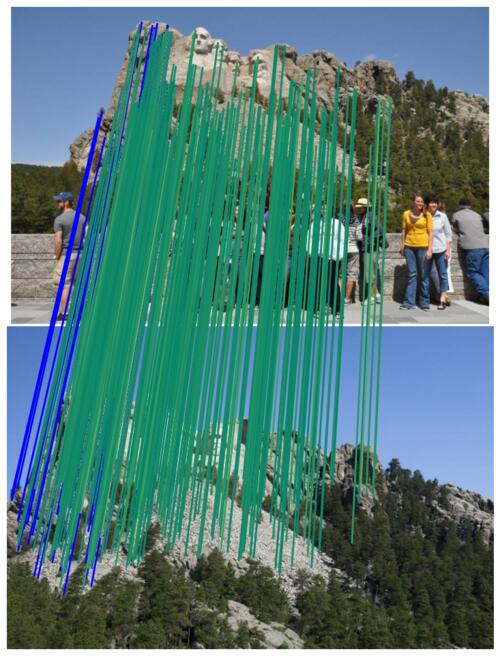
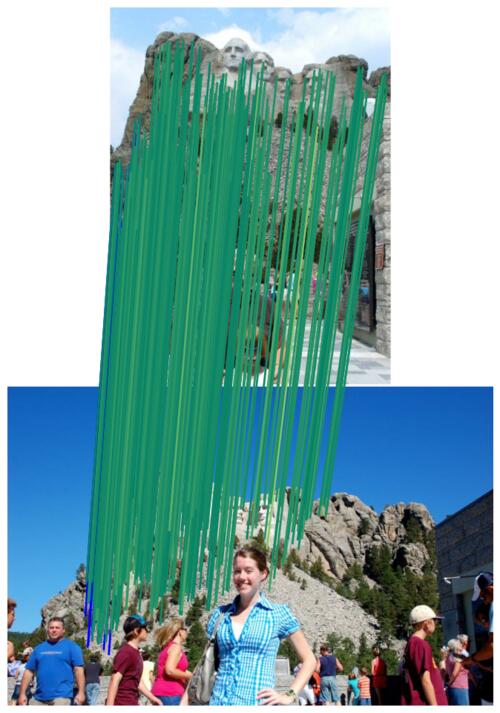
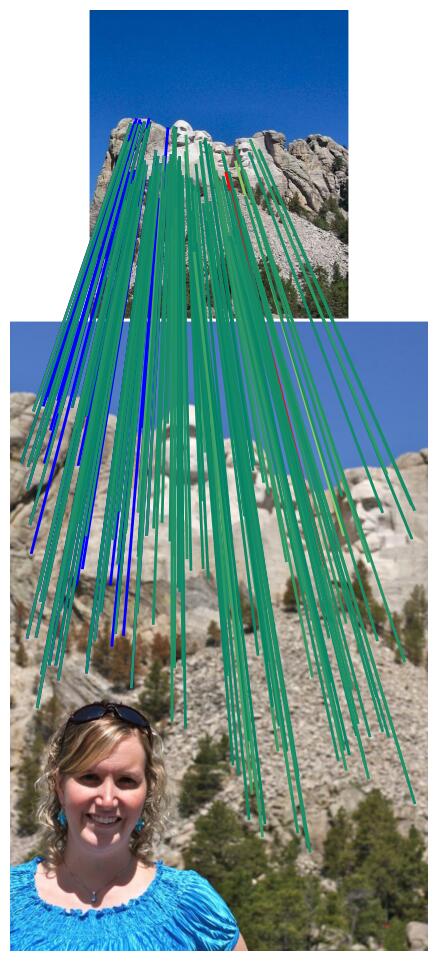
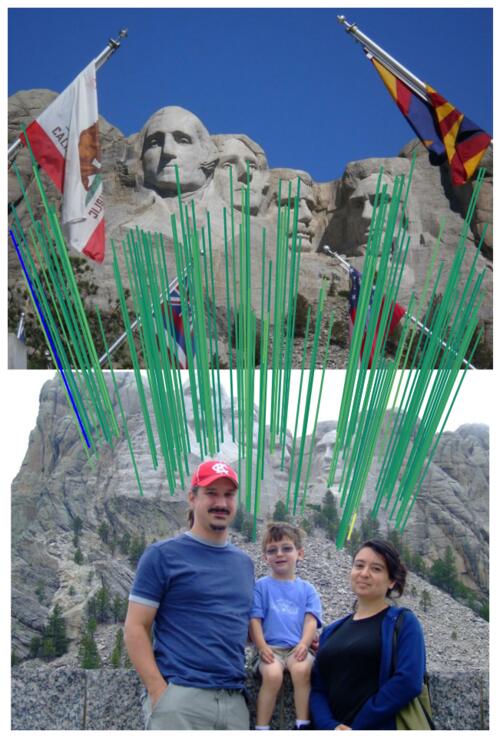
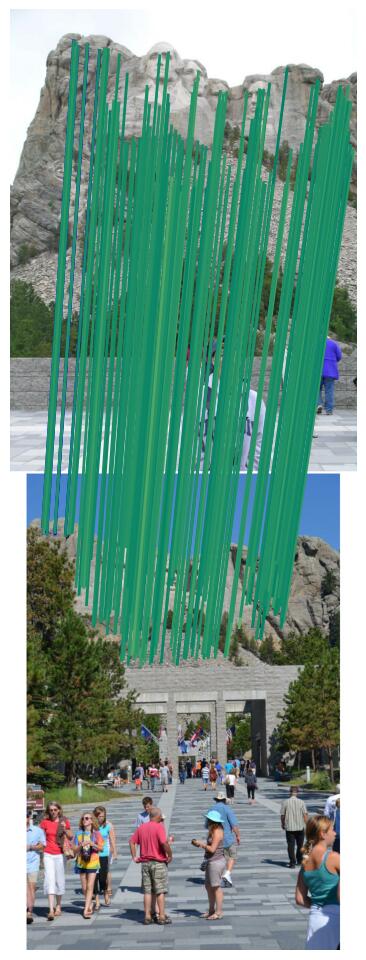
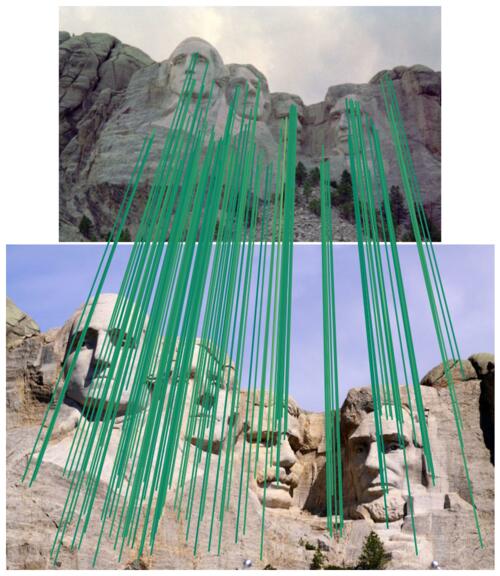
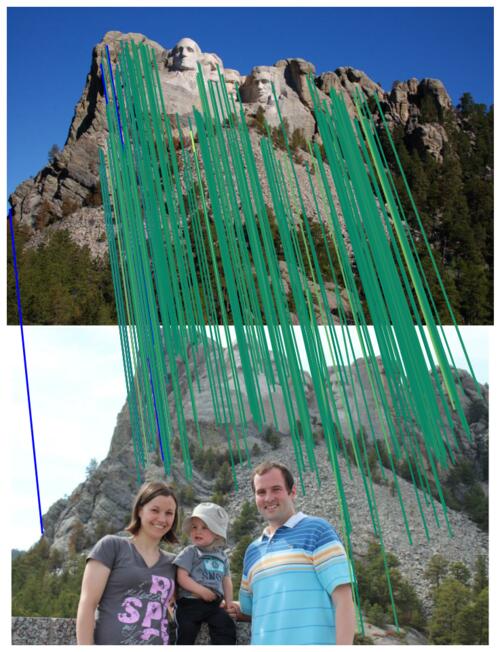
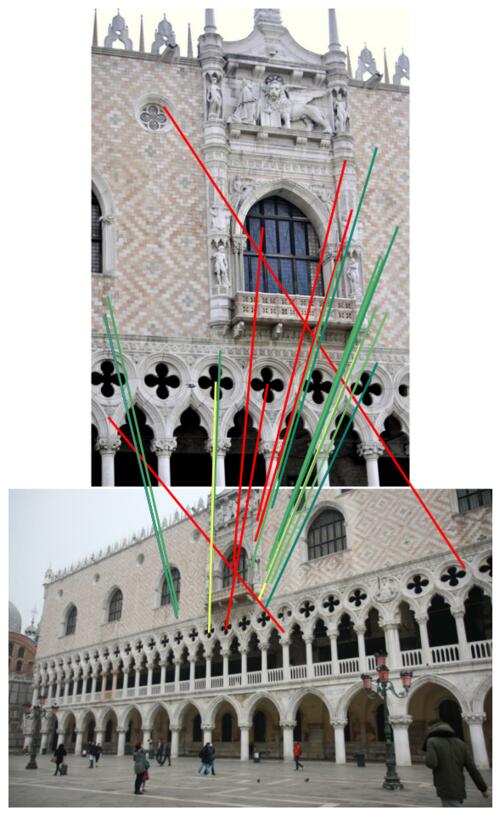
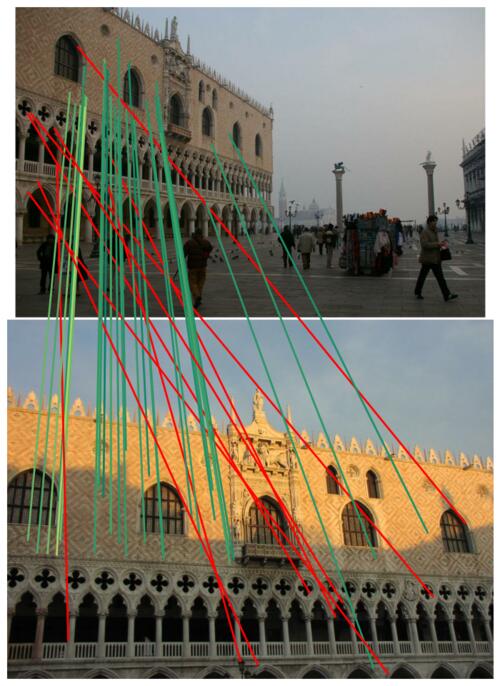
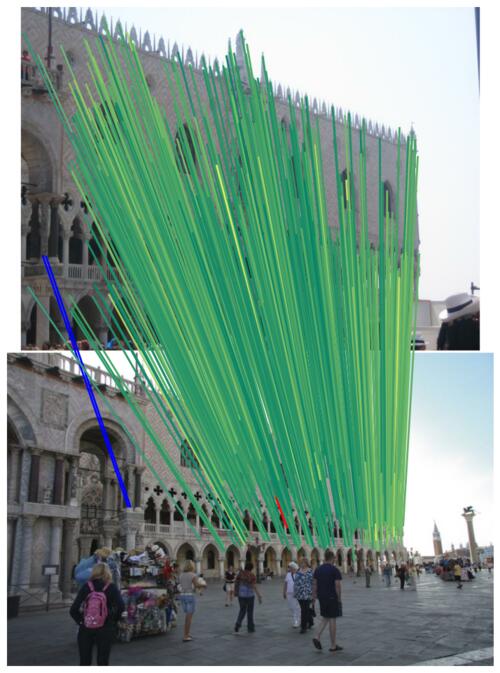
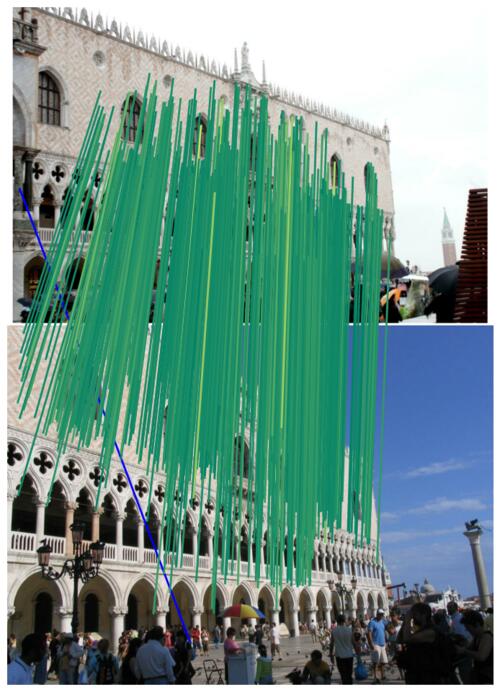
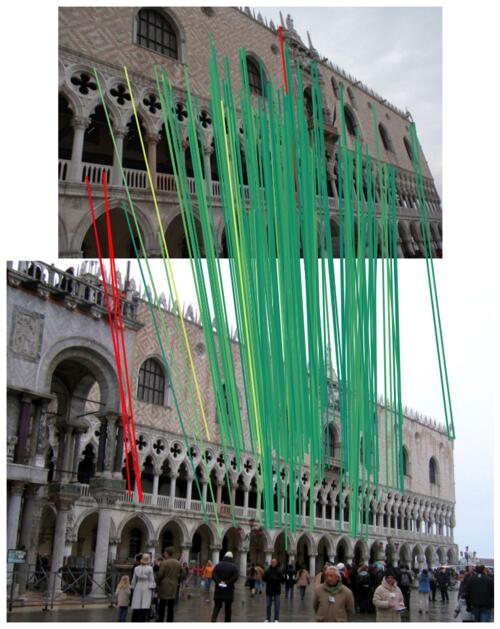
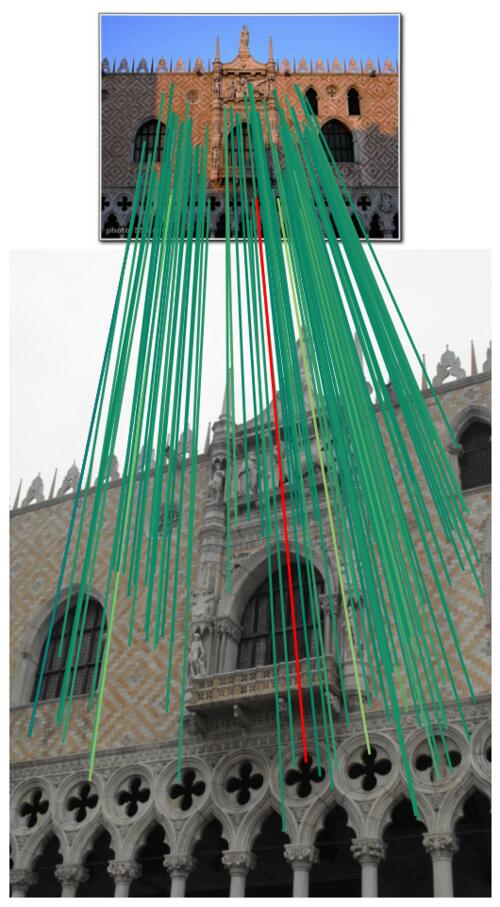
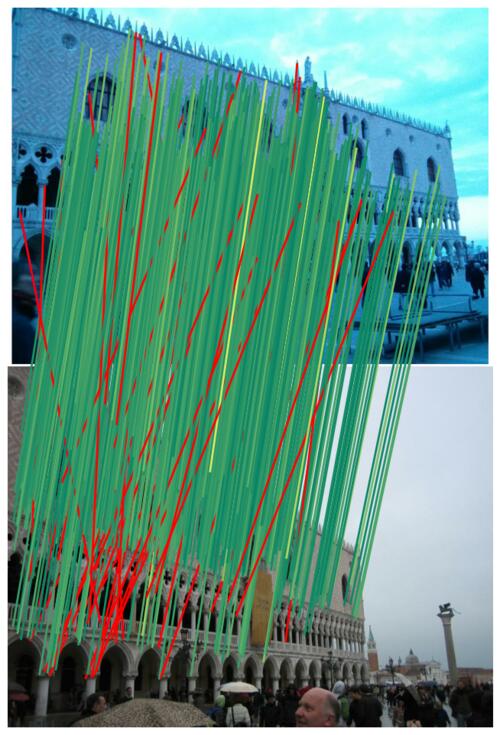
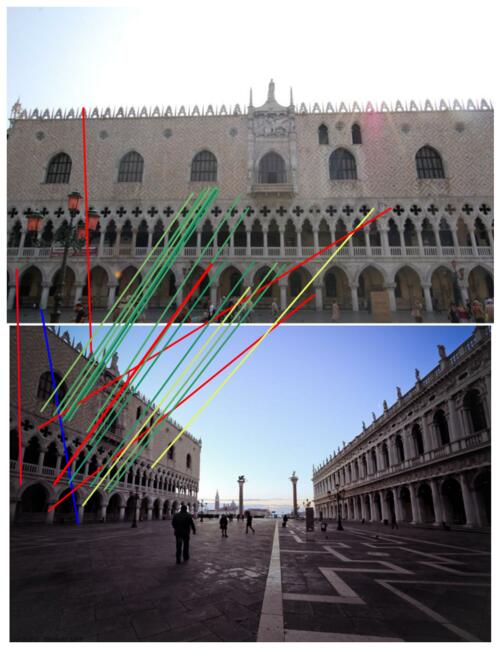
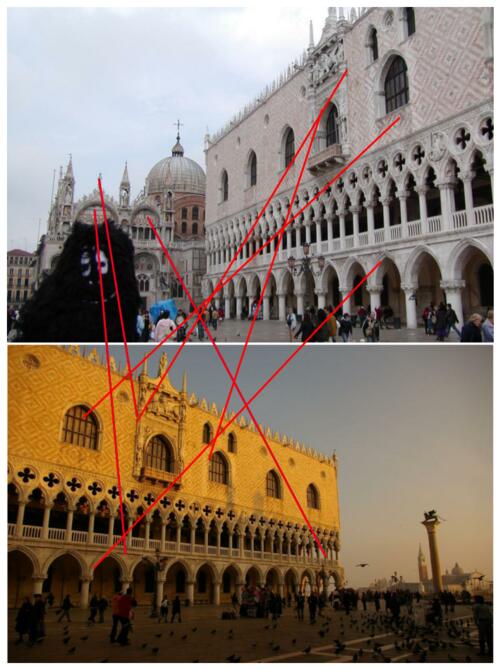
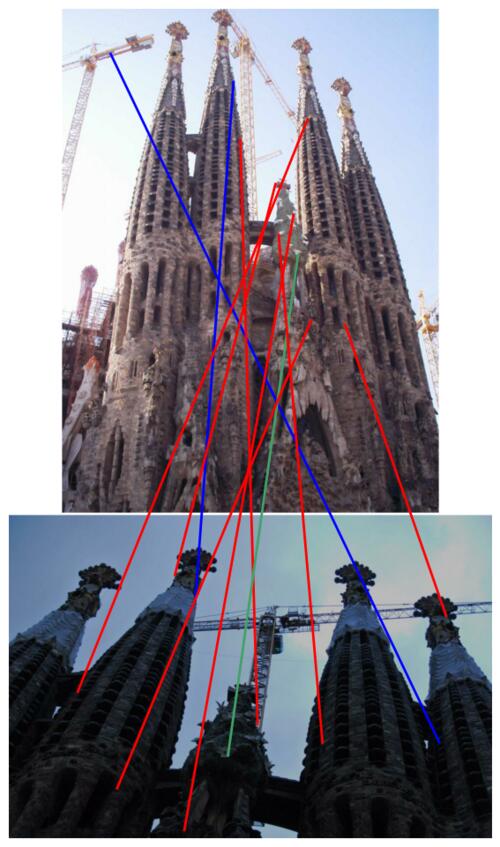
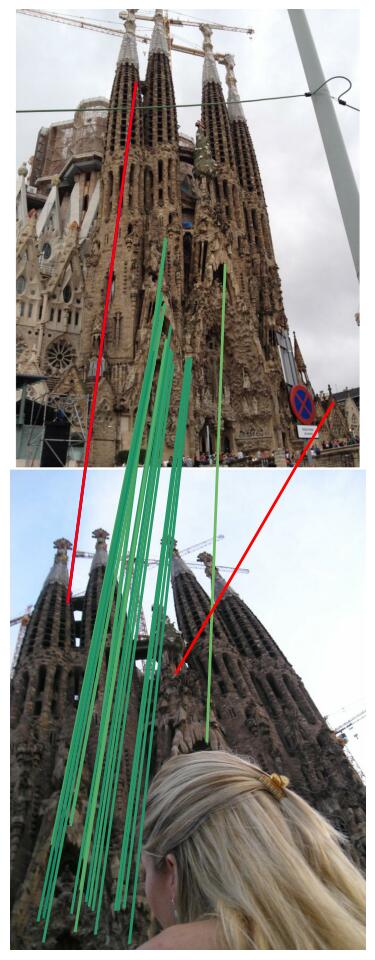
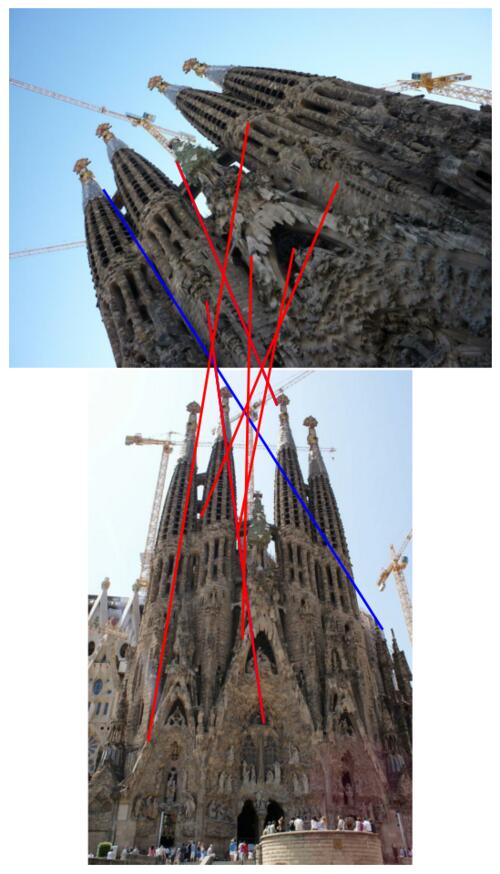
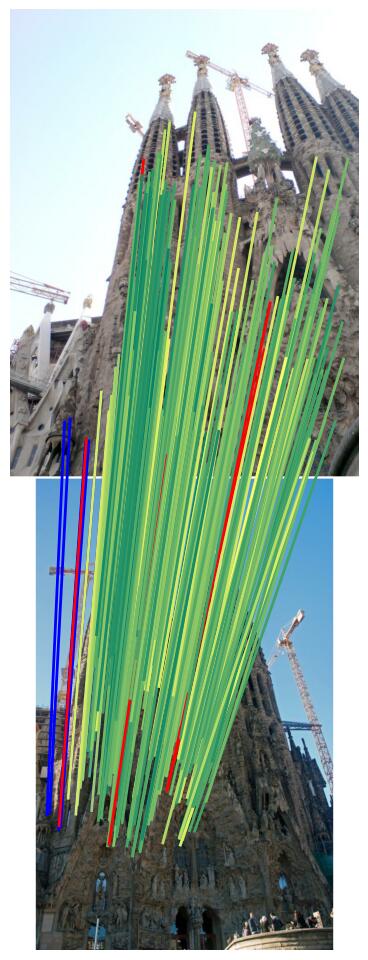
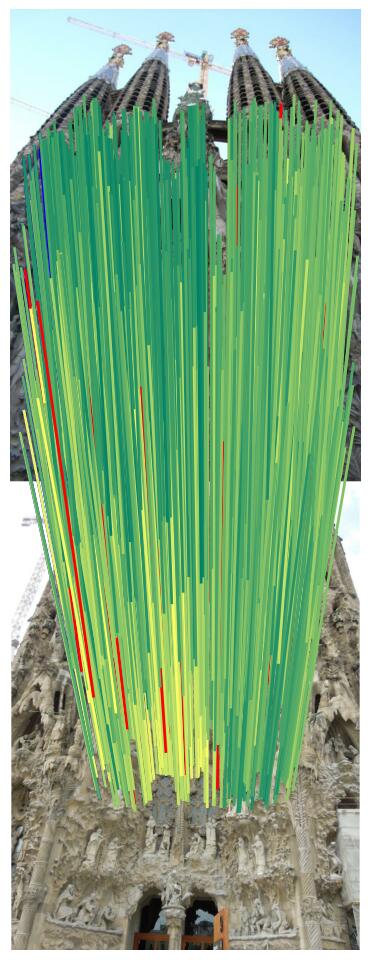
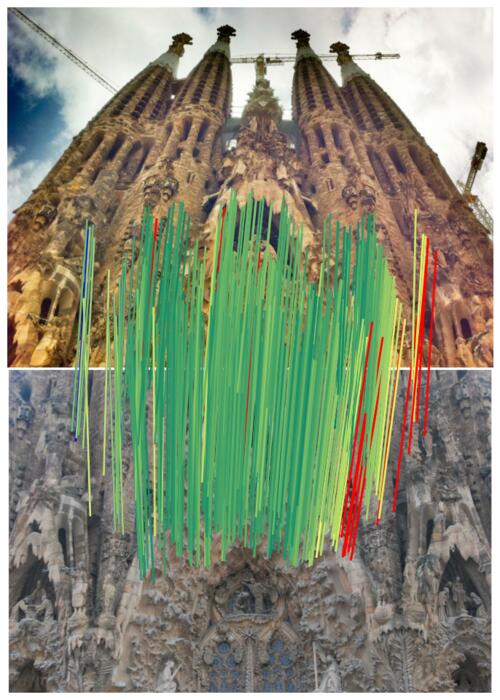
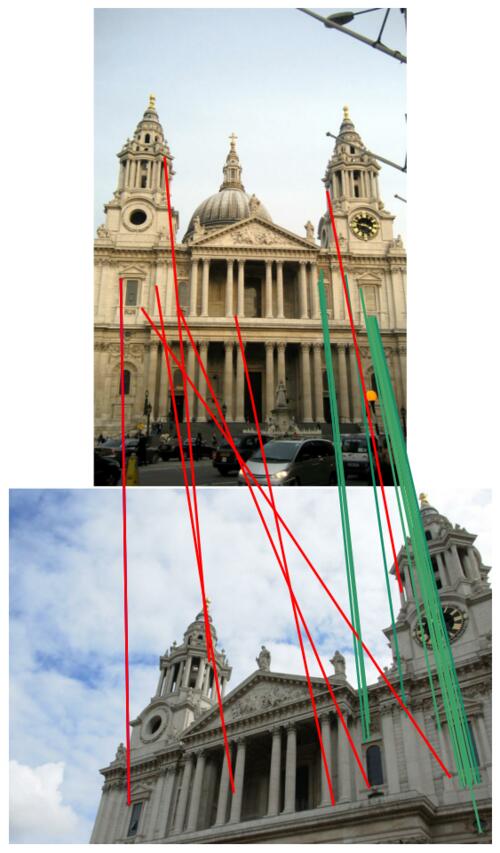
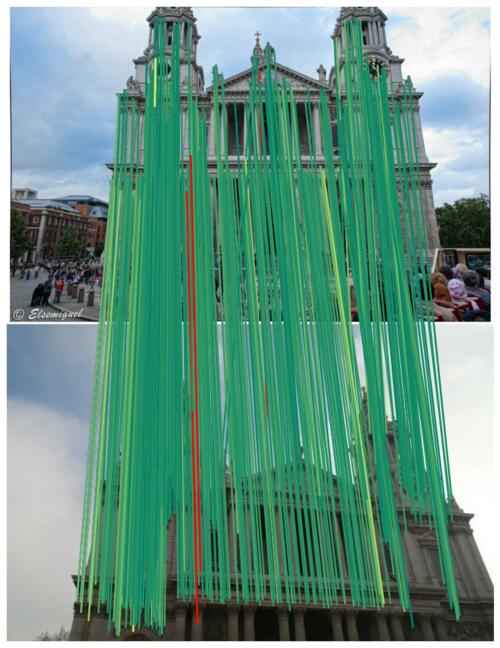
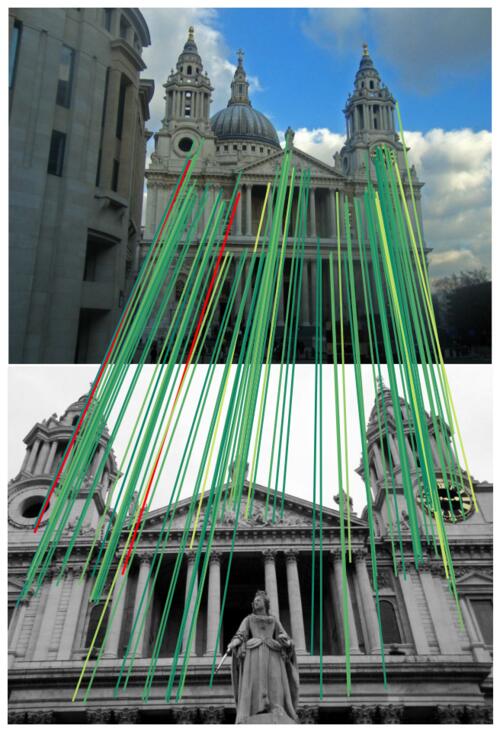
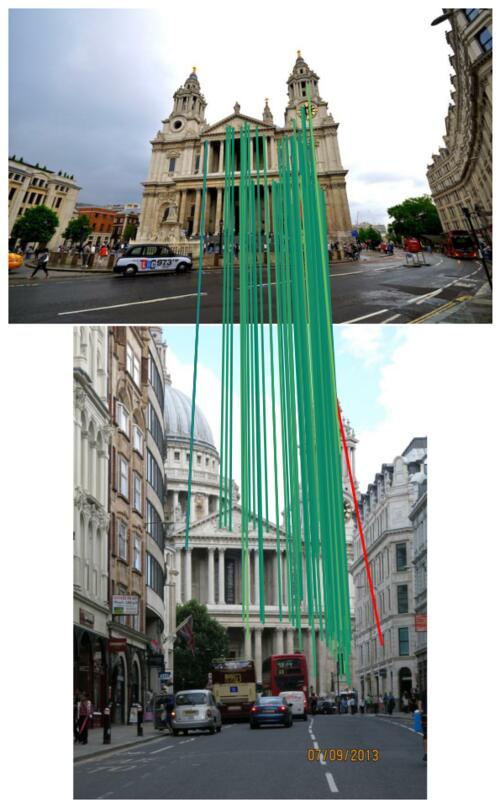
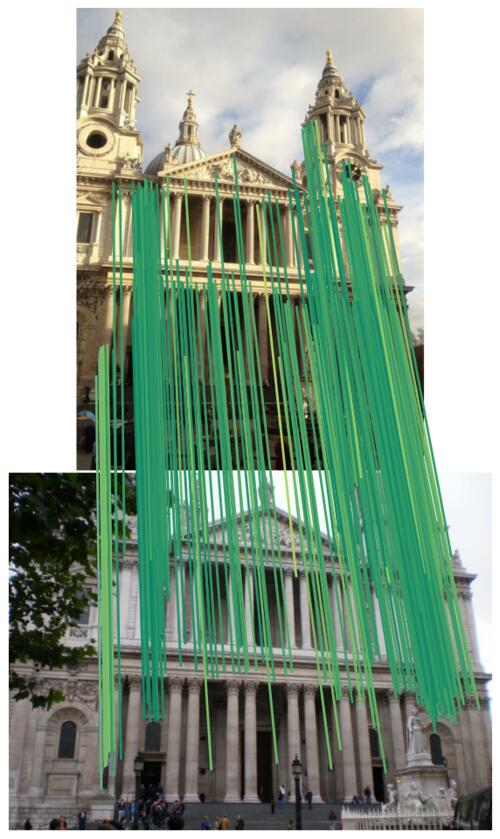
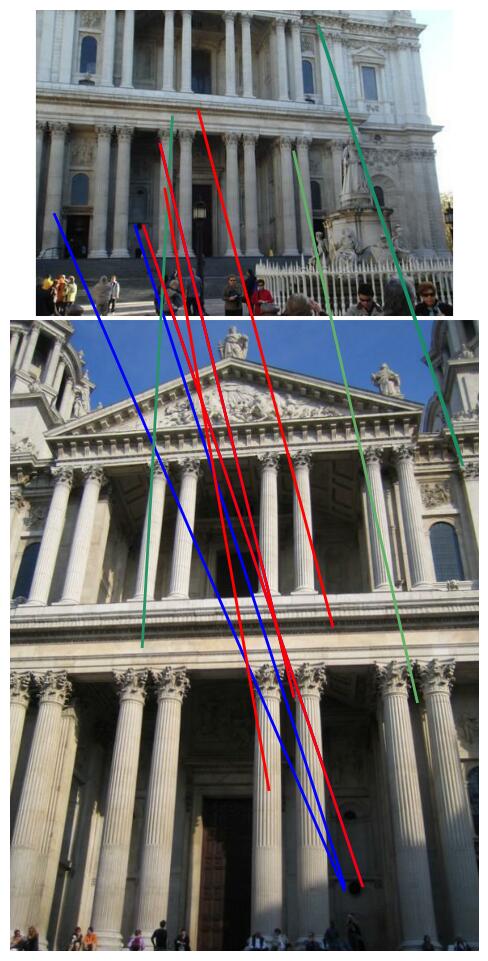
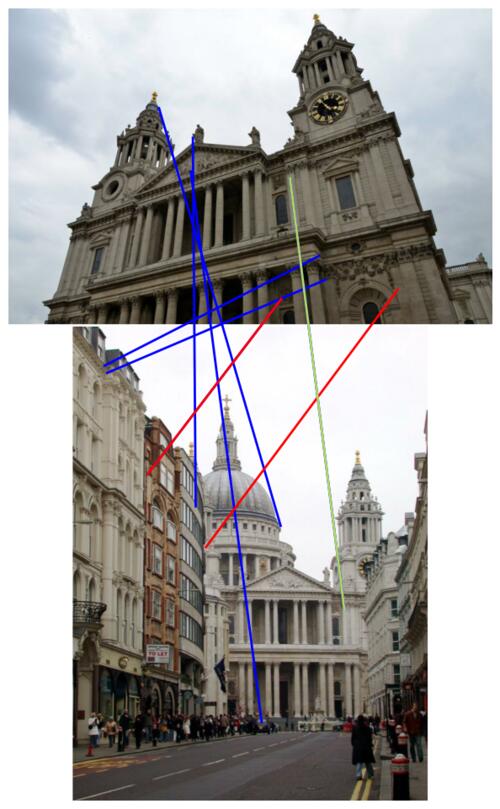
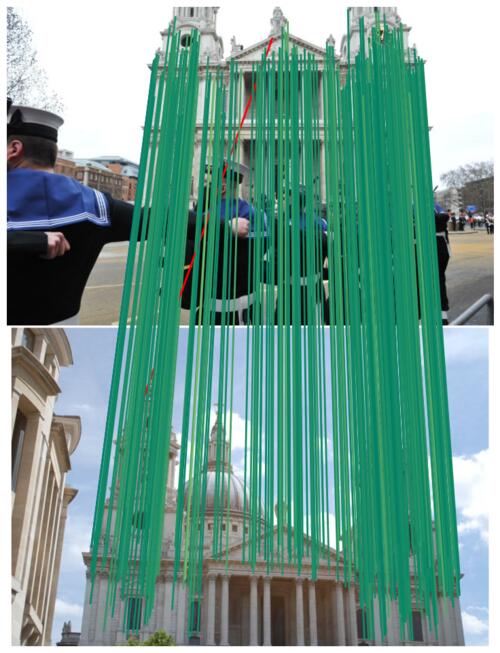
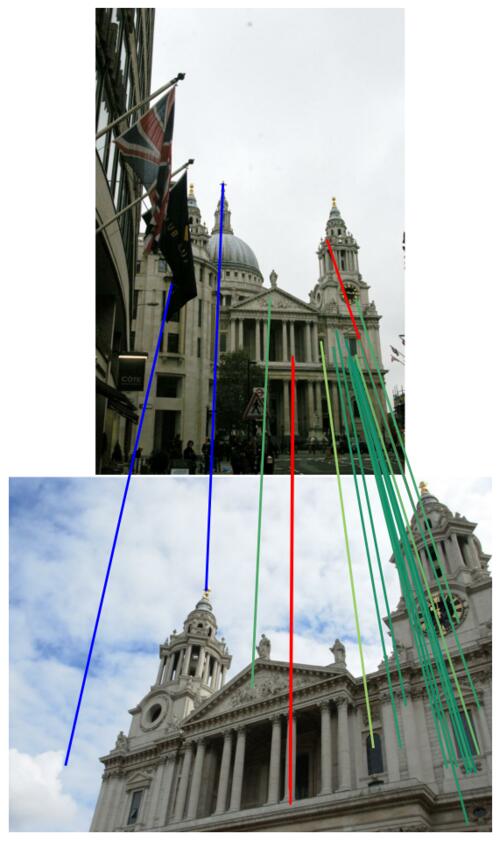
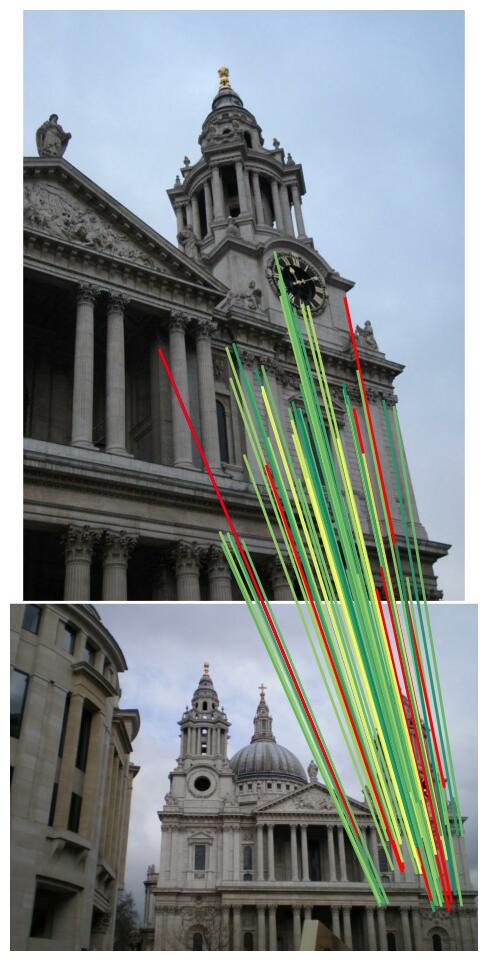
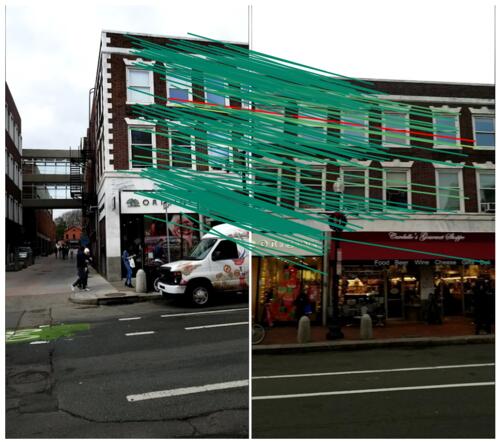
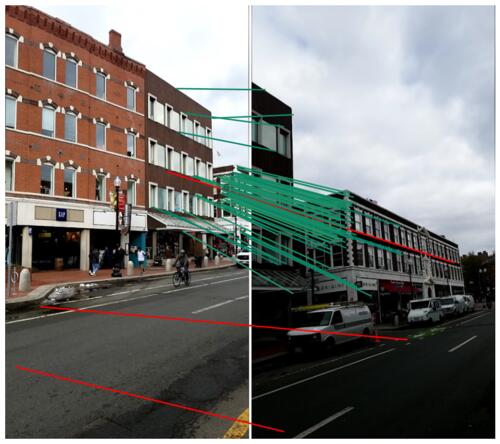
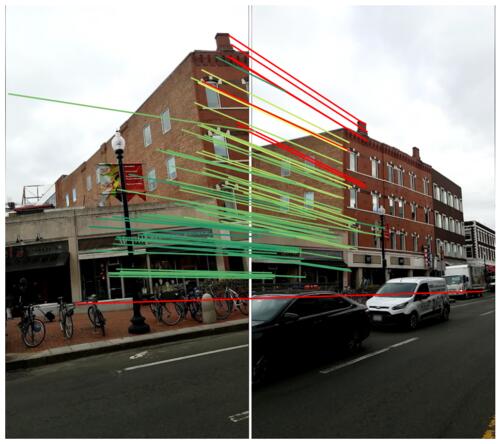
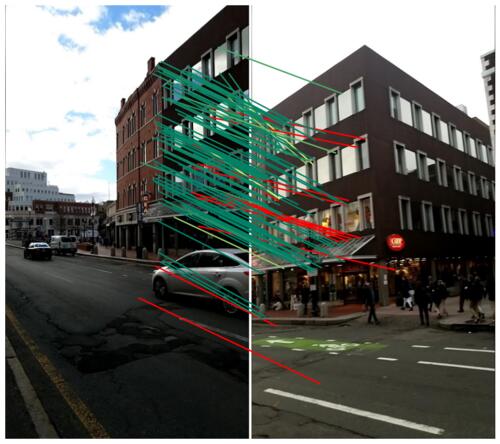
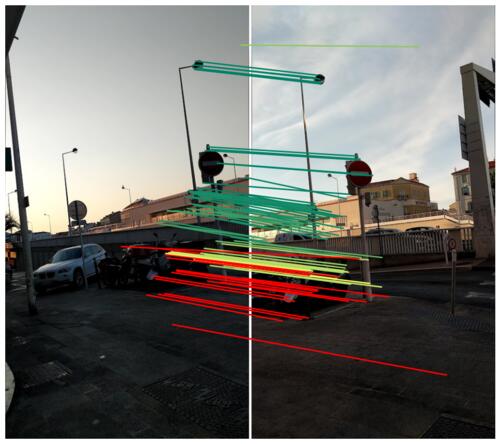
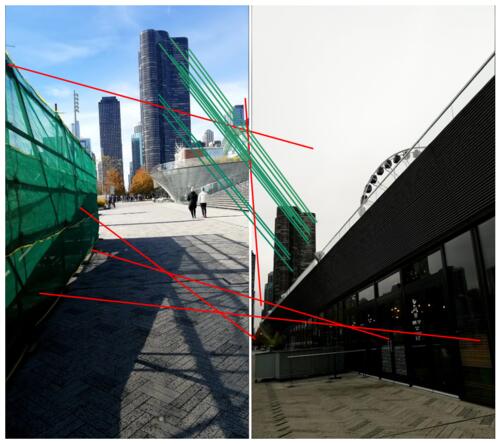
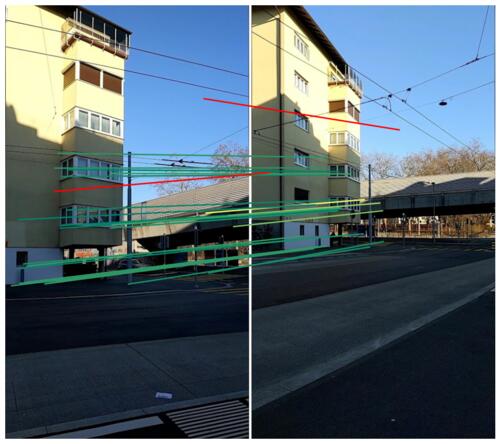
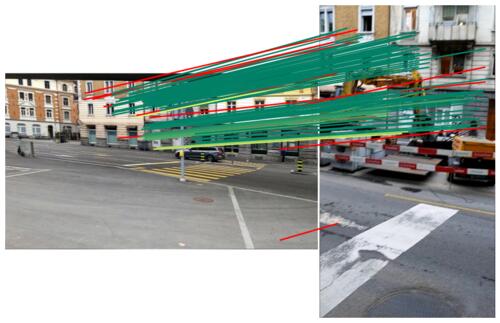
We show the inliers that survive the robust estimation loop (i.e. RANSAC), or those supplied with the submission if using custom matches, and use the depth estimates to determine whether they are correct. We draw matches above a 5-pixel error threshold in red, and those below are color-coded by their error, from 0 (green) to 5 pixels (yellow). Matches for which we do not have depth estimates are drawn in blue. Please note that the depth maps are estimates and may contain errors.
— British Museum —



— Florence Cathedral Side —
— Lincoln Memorial Statue —

— London Bridge —



— Milan Cathedral —
— Mount Rushmore —


— Piazza San Marco —

— Sagrada Familia —



— Saint Paul's Cathedral —
Phototourism dataset / Multiview track
mAA at 10 degrees: N/A (±0.00000 over 1 run(s) / ±0.12922 over 9 scenes)
Rank (per category): 34 (of 51)
| Scene | Features | Matches (input) |
RegistrationRatio (%) | Number of Landmarks |
Track Length | ATE | mAA(50) | mAA(100) |
| BM | 7956.0 | 500.34 | 99.61 Rank: 37/51 |
3280.21 Rank: 29/51 |
4.782 Rank: 34/51 |
0.47213 Rank: 28/51 |
0.46118 (±0.00000) Rank: 30/51 |
0.60299 (±0.00000) Rank: 31/51 |
| FCS | 7838.2 | 606.40 | 96.61 Rank: 35/51 |
4951.52 Rank: 27/51 |
4.480 Rank: 31/51 |
0.23818 Rank: 21/51 |
0.69352 (±0.00000) Rank: 32/51 |
0.76857 (±0.00000) Rank: 30/51 |
| LMS | 7720.4 | 455.90 | 99.21 Rank: 21/51 |
3587.61 Rank: 23/51 |
4.441 Rank: 31/51 |
0.34731 Rank: 37/51 |
0.82748 (±0.00000) Rank: 19/51 |
0.88386 (±0.00000) Rank: 18/51 |
| LB | 7937.6 | 504.52 | 98.09 Rank: 21/51 |
3558.90 Rank: 27/51 |
4.565 Rank: 31/51 |
0.46649 Rank: 10/51 |
0.63295 (±0.00000) Rank: 37/51 |
0.72775 (±0.00000) Rank: 38/51 |
| MC | 7779.7 | 632.24 | 99.77 Rank: 31/51 |
4662.79 Rank: 24/51 |
4.702 Rank: 32/51 |
0.37942 Rank: 33/51 |
0.51484 (±0.00000) Rank: 35/51 |
0.65915 (±0.00000) Rank: 35/51 |
| MR | 7756.6 | 738.69 | 93.60 Rank: 35/51 |
5674.43 Rank: 21/51 |
4.310 Rank: 35/51 |
0.48466 Rank: 18/51 |
0.46967 (±0.00000) Rank: 15/51 |
0.58293 (±0.00000) Rank: 16/51 |
| PSM | 7768.5 | 296.97 | 90.73 Rank: 35/51 |
3673.27 Rank: 31/51 |
3.296 Rank: 34/51 |
0.61588 Rank: 36/51 |
0.32856 (±0.00000) Rank: 39/51 |
0.41880 (±0.00000) Rank: 36/51 |
| SF | 7860.0 | 770.96 | 96.77 Rank: 30/51 |
6545.94 Rank: 20/51 |
4.471 Rank: 33/51 |
0.32631 Rank: 32/51 |
0.70903 (±0.00000) Rank: 30/51 |
0.79097 (±0.00000) Rank: 30/51 |
| SPC | 7849.4 | 411.29 | 96.17 Rank: 40/51 |
3854.36 Rank: 34/51 |
4.201 Rank: 35/51 |
0.53502 Rank: 37/51 |
0.63224 (±0.00000) Rank: 37/51 |
0.72987 (±0.00000) Rank: 34/51 |
| Avg | 7829.6 | 546.37 | 96.73 Rank: 34/51 |
4421.00 Rank: 27/51 |
4.361 Rank: 32/51 |
0.42949 Rank: 32/51 |
0.58550 (±0.00000) Rank: 34/51 |
0.68499 (±0.00000) Rank: 34/51 |
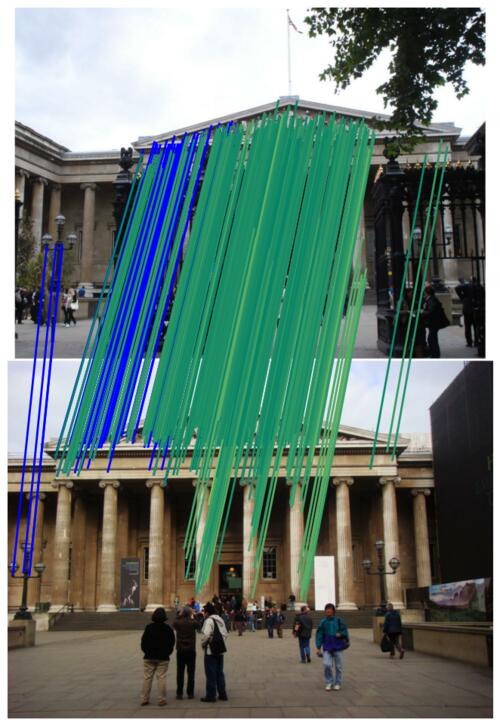
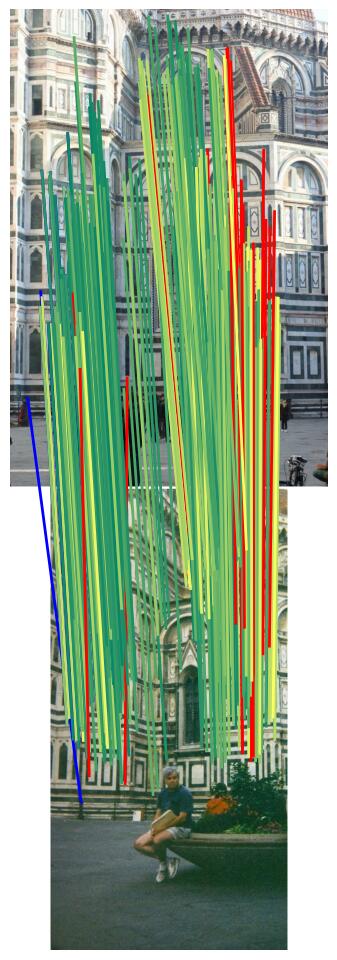
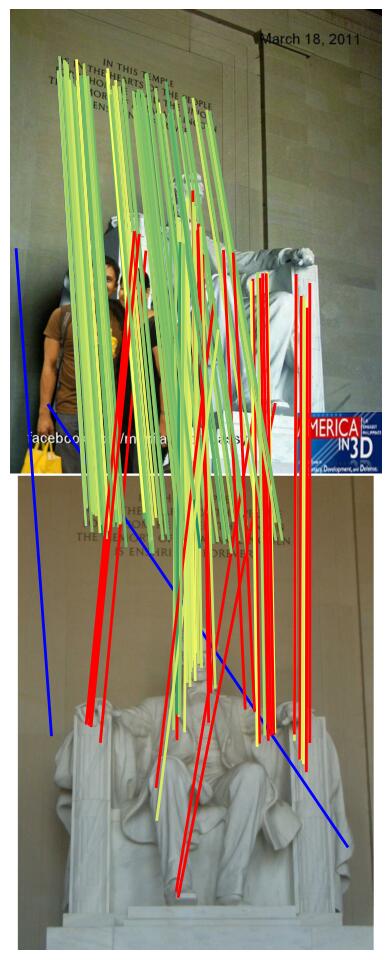
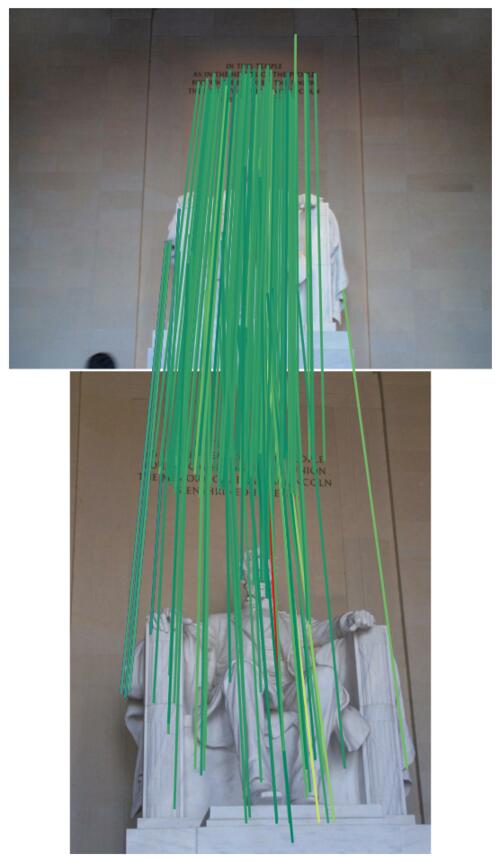
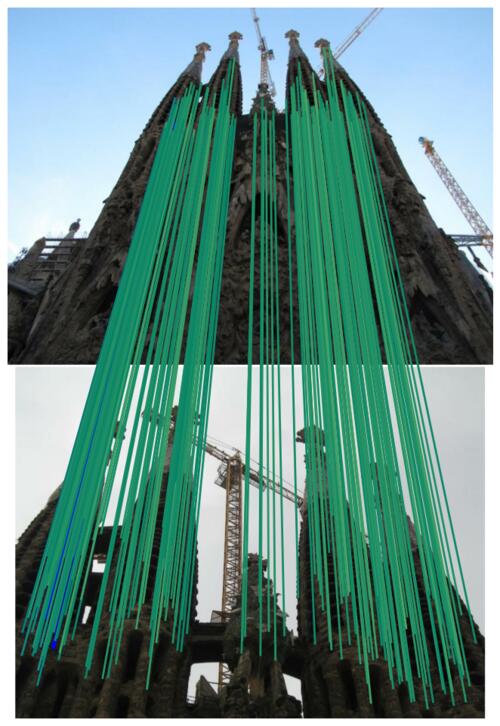
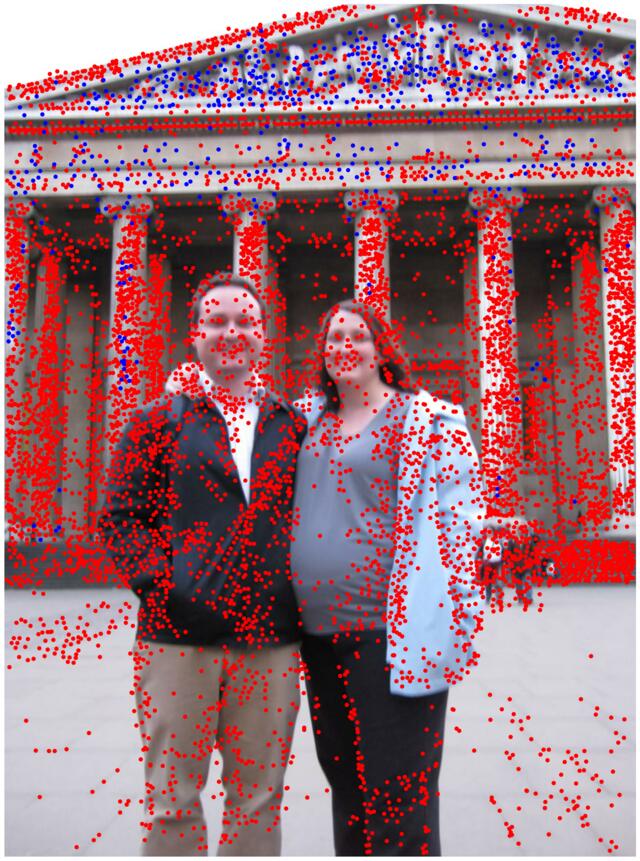
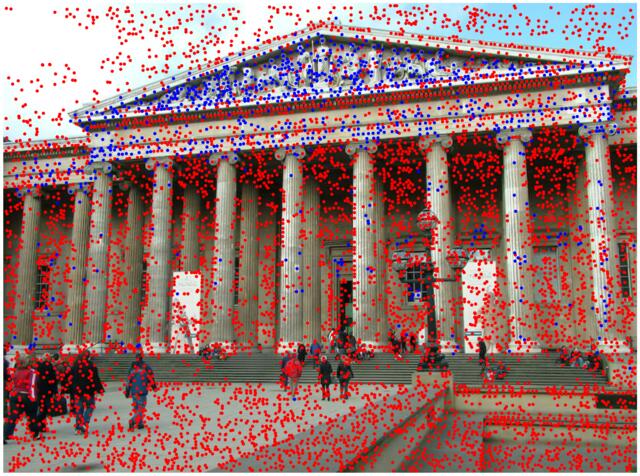
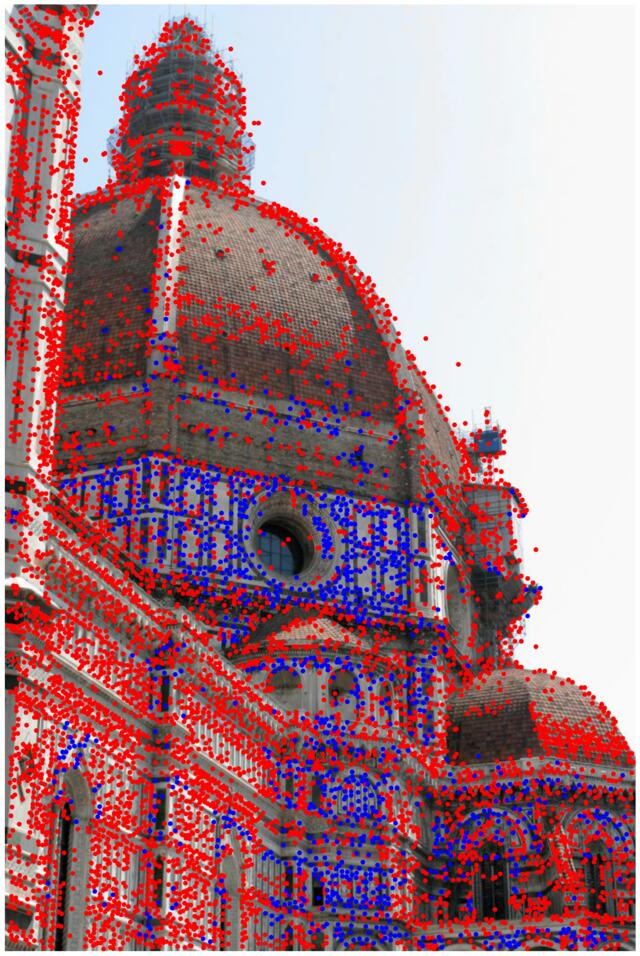
In the multi-view track we reconstruct the scene with Structure-from-Motion (Colmap) with small sets of images. We show the results for one bag of 10 images. Keypoints are drawn in blue if they are part of the model, and in red otherwise.
— British Museum —








— Florence Cathedral Side —

— Lincoln Memorial Statue —

— London Bridge —









— Milan Cathedral —







— Mount Rushmore —


— Piazza San Marco —





— Sagrada Familia —
— Saint Paul's Cathedral —






Prague Parks dataset / Stereo track
mAA at 10 degrees: 0.53697 (±0.00000 over 1 run(s) / ±0.05037 over 3 scenes)
Rank (per category): 30 (of 51)
| Scene | Features | Matches (raw) |
Matches (final) |
Rep. @ 3 px. | MS @ 3 px. | mAA(5o) | mAA(10o) |
| Lizard | 8000.0 | 575.7 | 460.0 | 0.145 Rank: 4/51 |
0.008 Rank: 35/51 |
0.38585 (±0.00000) Rank: 26/51 |
0.48710 (±0.00000) Rank: 27/51 |
| Pond | 8000.0 | 742.7 | 544.4 | 0.172 Rank: 1/51 |
0.056 Rank: 8/51 |
0.40561 (±0.00000) Rank: 30/51 |
0.51784 (±0.00000) Rank: 31/51 |
| Tree | 8000.0 | 478.2 | 315.7 | 0.126 Rank: 17/51 |
0.019 Rank: 31/51 |
0.52583 (±0.00000) Rank: 25/51 |
0.60596 (±0.00000) Rank: 28/51 |
| Avg | 8000.0 | 598.9 | 440.0 | 0.148 Rank: 10/51 |
0.028 Rank: 22/51 |
0.43910 (±0.00000) Rank: 28/51 |
0.53697 (±0.00000) Rank: 30/51 |
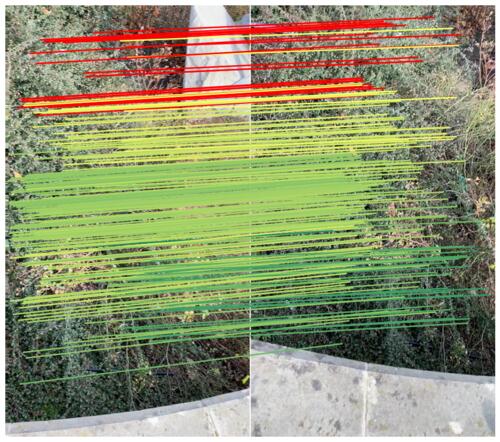
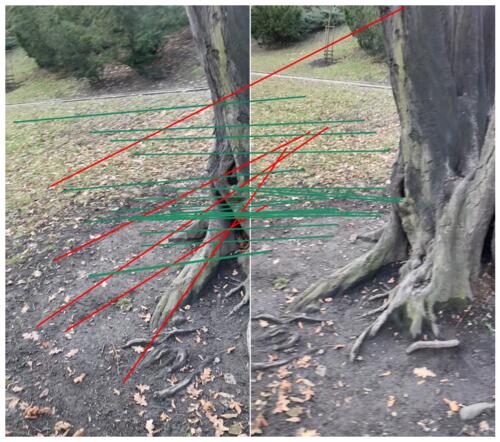
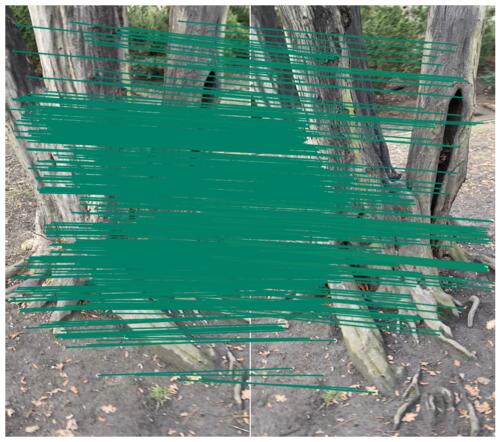
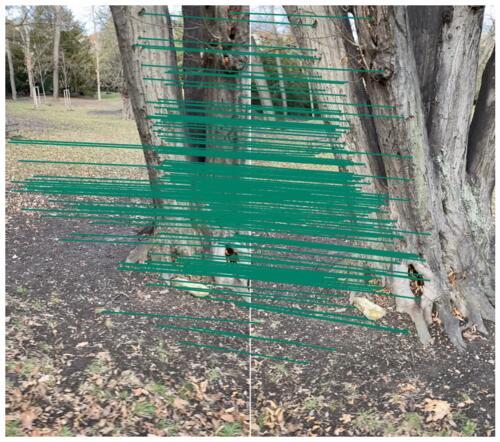
We show the inliers that survive the robust estimation loop (i.e. RANSAC), or those supplied with the submission if using custom matches, and use the depth estimates to determine whether they are correct. We draw matches above a 5-pixel error threshold in red, and those below are color-coded by their error, from 0 (green) to 5 pixels (yellow). Matches for which we do not have depth estimates are drawn in blue. Please note that the depth maps are estimates and may contain errors.
— Lizard —



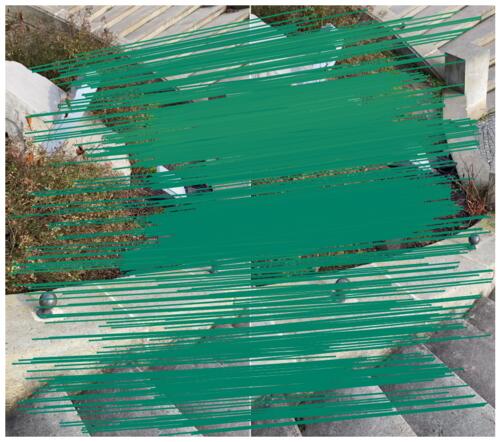

— Pond —
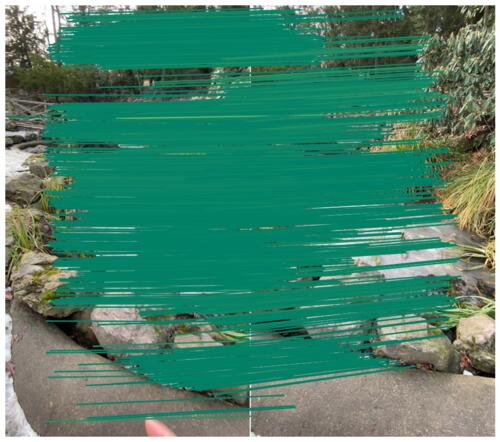

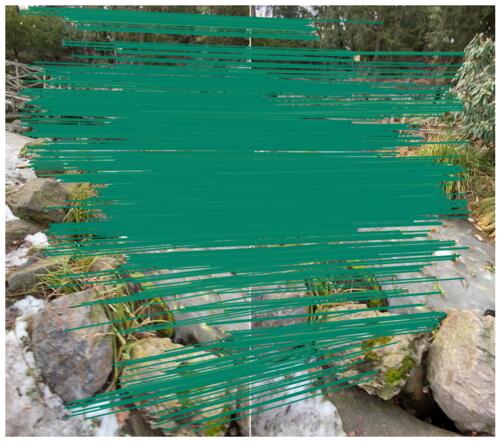

— Tree —





Prague Parks dataset / Multiview track
mAA at 10 degrees: N/A (±0.00000 over 1 run(s) / ±0.14355 over 3 scenes)
Rank (per category): 12 (of 51)
| Scene | Features | Matches (input) |
RegistrationRatio (%) | Number of Landmarks |
Track Length | ATE | mAA(50) | mAA(100) |
| Lizard | 8000.0 | 459.14 | 81.57 Rank: 33/51 |
1328.26 Rank: 29/51 |
3.209 Rank: 27/51 |
13.34833 Rank: 5/51 |
0.56342 (±0.00000) Rank: 16/51 |
0.62924 (±0.00000) Rank: 20/51 |
| Pond | 8000.0 | 790.23 | 67.23 Rank: 33/51 |
1555.69 Rank: 30/51 |
2.917 Rank: 21/51 |
0.40396 Rank: 4/51 |
0.24471 (±0.00000) Rank: 32/51 |
0.28676 (±0.00000) Rank: 25/51 |
| Tree | 8000.0 | 446.88 | 73.06 Rank: 9/51 |
1016.82 Rank: 24/51 |
2.968 Rank: 19/51 |
5.81376 Rank: 12/51 |
0.47996 (±0.00000) Rank: 4/51 |
0.52694 (±0.00000) Rank: 2/51 |
| Avg | 8000.0 | 565.42 | 73.95 Rank: 31/51 |
1300.26 Rank: 29/51 |
3.031 Rank: 25/51 |
6.52202 Rank: 6/51 |
0.42936 (±0.00000) Rank: 12/51 |
0.48098 (±0.00000) Rank: 12/51 |
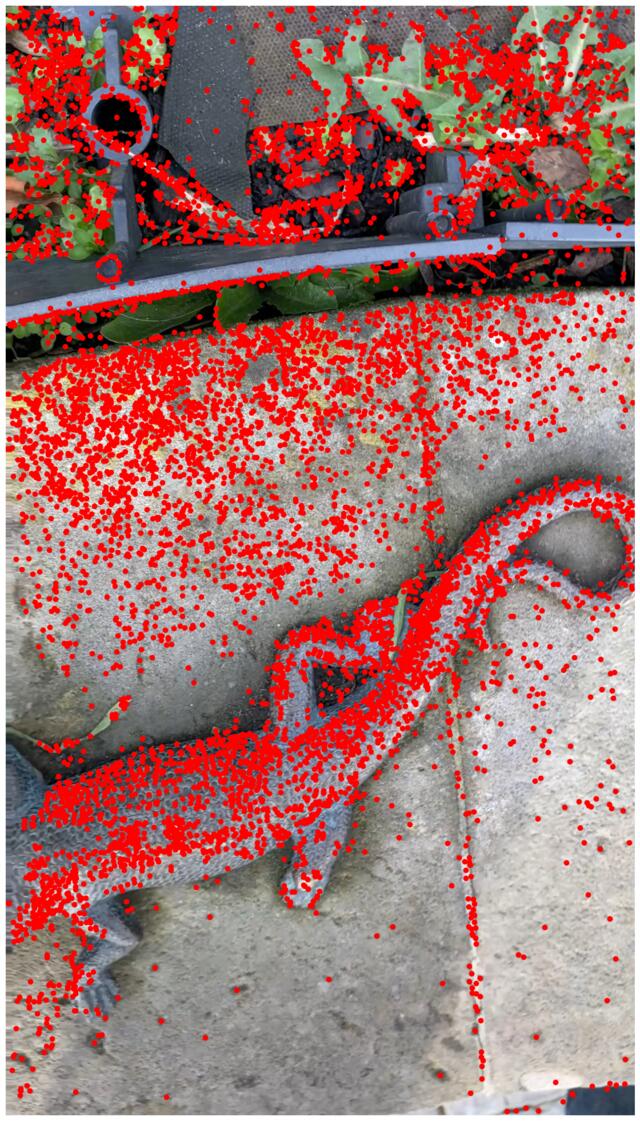
In the multi-view track we reconstruct the scene with Structure-from-Motion (Colmap) with small sets of images. We show the results for one bag of 10 images. Keypoints are drawn in blue if they are part of the model, and in red otherwise.
— Lizard —




— Pond —

— Tree —
Google Urban dataset / Stereo track
mAA at 10 degrees: 0.26931 (±0.00000 over 1 run(s) / ±0.11895 over 17 scenes)
Rank (per category): 22 (of 51)
| Scene | Features | Matches (raw) |
Matches (final) |
mAA(5o) | mAA(10o) |
| Amsterdam (AMS) | 5064.6 | 298.9 | 161.6 | 0.14107 (±0.00000) Rank: 25/51 |
0.26473 (±0.00000) Rank: 25/51 |
| Bangkok (BGK) | 5221.0 | 258.6 | 120.8 | 0.05906 (±0.00000) Rank: 18/51 |
0.14442 (±0.00000) Rank: 21/51 |
| Barcelona (BCN) | 4545.4 | 235.6 | 118.9 | 0.11062 (±0.00000) Rank: 19/51 |
0.17766 (±0.00000) Rank: 20/51 |
| Buenos Aires (BAR) | 5431.6 | 324.7 | 166.8 | 0.15342 (±0.00000) Rank: 25/51 |
0.27397 (±0.00000) Rank: 23/51 |
| Cambridge (CAM) | 5002.4 | 236.2 | 94.0 | 0.18562 (±0.00000) Rank: 25/51 |
0.29384 (±0.00000) Rank: 25/51 |
| Cannes (CAN) | 4810.6 | 299.2 | 140.0 | 0.31982 (±0.00000) Rank: 21/51 |
0.40645 (±0.00000) Rank: 21/51 |
| Chicago (CHI) | 4589.0 | 153.4 | 41.8 | 0.05260 (±0.00000) Rank: 23/51 |
0.09843 (±0.00000) Rank: 24/51 |
| Helsinki (HEL) | 5608.3 | 398.2 | 210.2 | 0.32423 (±0.00000) Rank: 21/51 |
0.51701 (±0.00000) Rank: 21/51 |
| Madrid (MAD) | 6004.1 | 256.5 | 100.7 | 0.05106 (±0.00000) Rank: 22/51 |
0.12523 (±0.00000) Rank: 22/51 |
| Mountain View (MTV) | 5148.7 | 202.2 | 75.9 | 0.12773 (±0.00000) Rank: 21/51 |
0.21855 (±0.00000) Rank: 21/51 |
| New Orleans (NOR) | 5063.9 | 241.0 | 99.7 | 0.18047 (±0.00000) Rank: 23/51 |
0.23314 (±0.00000) Rank: 24/51 |
| San Francisco (SF) | 5023.4 | 247.9 | 122.7 | 0.06719 (±0.00000) Rank: 26/51 |
0.14961 (±0.00000) Rank: 28/51 |
| Singapore (SG) | 6042.3 | 309.6 | 122.5 | 0.21456 (±0.00000) Rank: 20/51 |
0.32848 (±0.00000) Rank: 17/51 |
| Sydney (SYD) | 5518.2 | 280.6 | 114.8 | 0.20087 (±0.00000) Rank: 25/51 |
0.32576 (±0.00000) Rank: 22/51 |
| Tokyo (TOK) | 5494.4 | 337.1 | 135.0 | 0.38088 (±0.00000) Rank: 22/51 |
0.51348 (±0.00000) Rank: 23/51 |
| Toronto (TOR) | 6037.9 | 238.0 | 72.1 | 0.12400 (±0.00000) Rank: 22/51 |
0.23400 (±0.00000) Rank: 22/51 |
| Zurich (ZRH) | 4937.5 | 266.6 | 146.4 | 0.22405 (±0.00000) Rank: 20/51 |
0.27354 (±0.00000) Rank: 25/51 |
| Average (Avg) | 5267.3 | 269.7 | 120.2 | 0.17160 (±0.00000) Rank: 22/51 |
0.26931 (±0.00000) Rank: 22/51 |
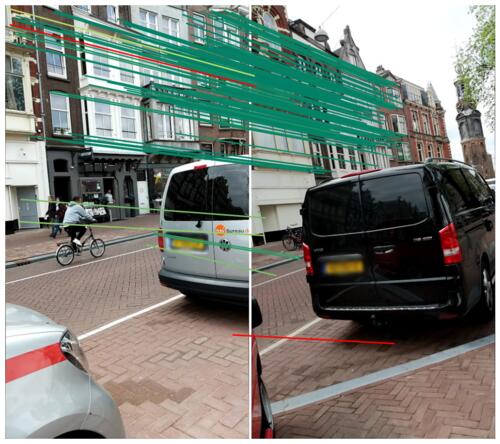
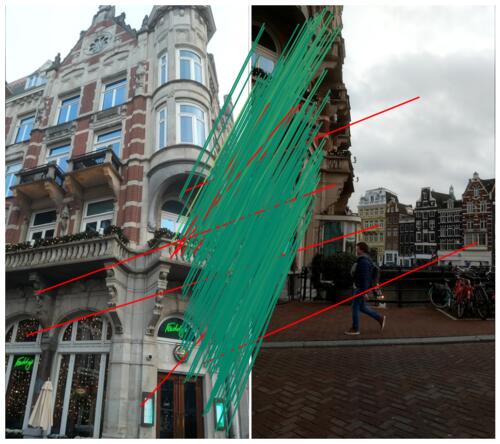
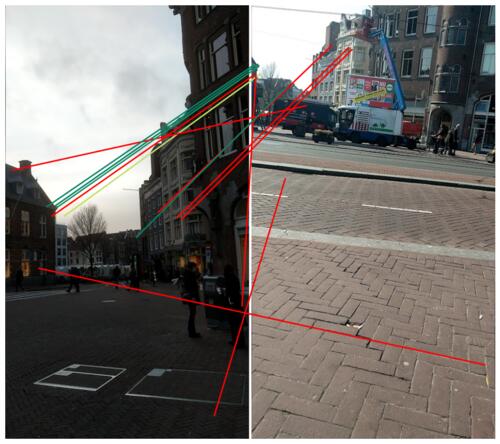
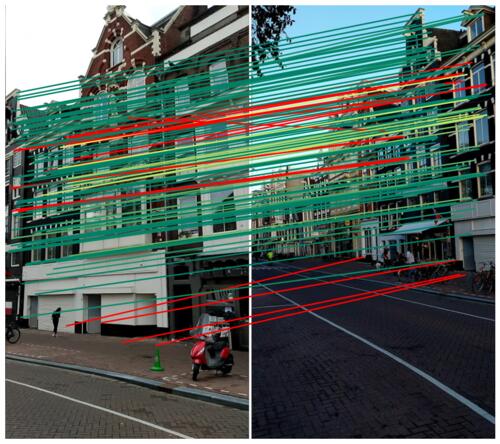
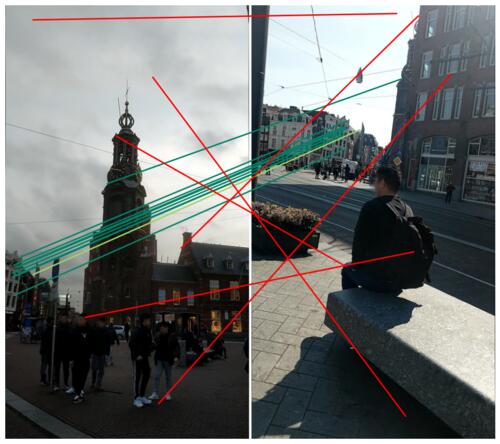
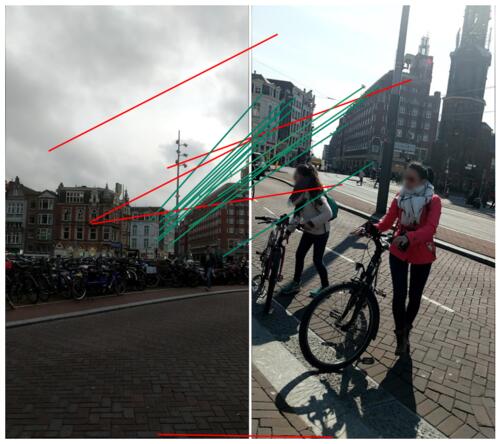
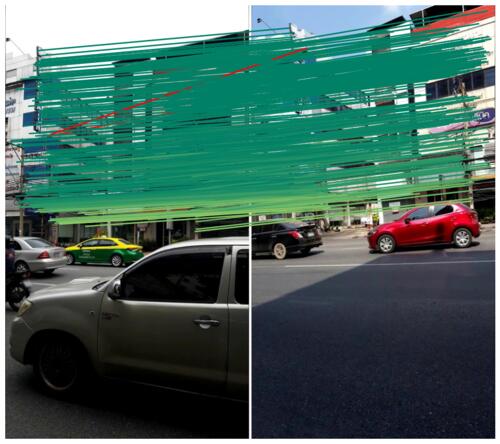
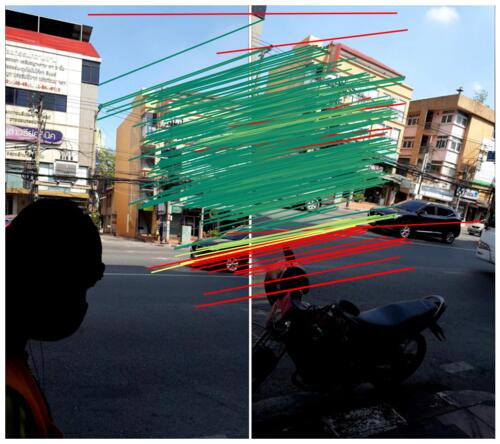
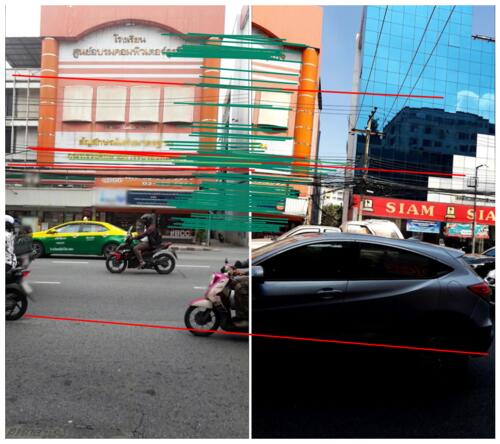
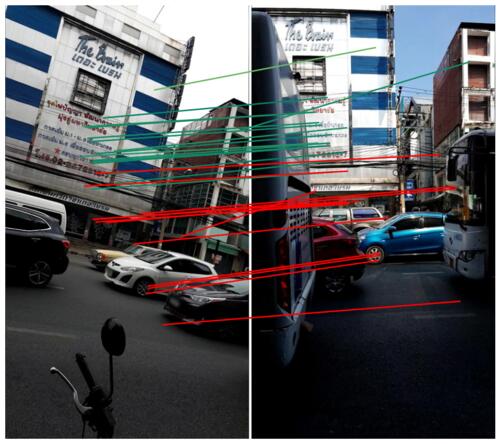
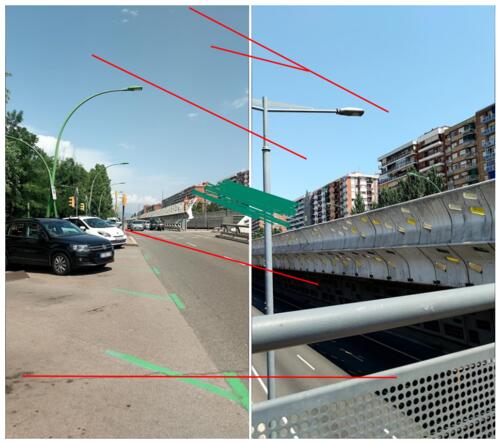
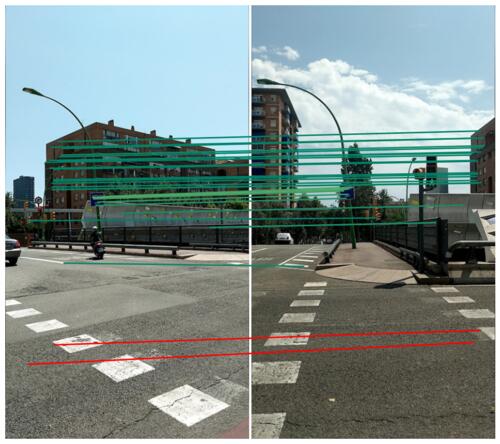
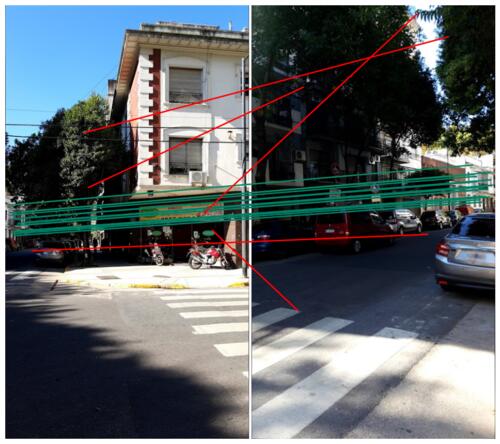
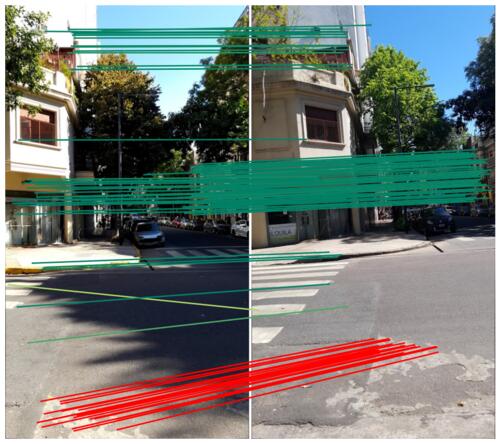
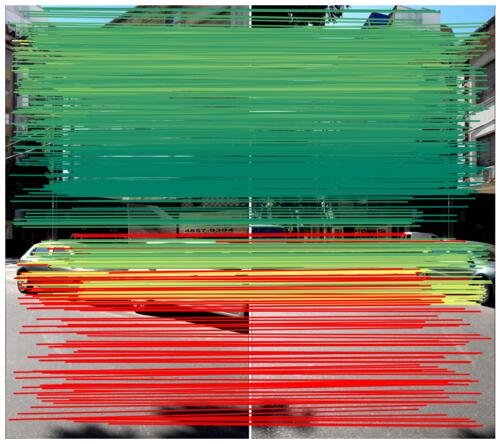
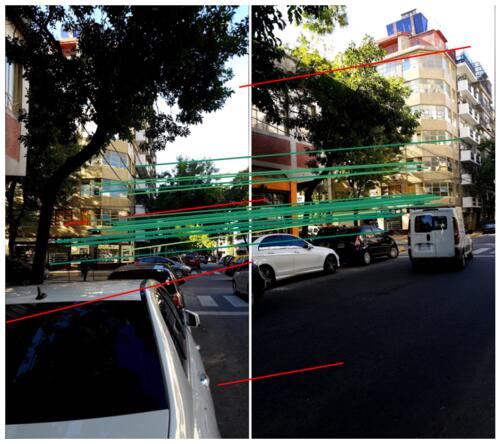
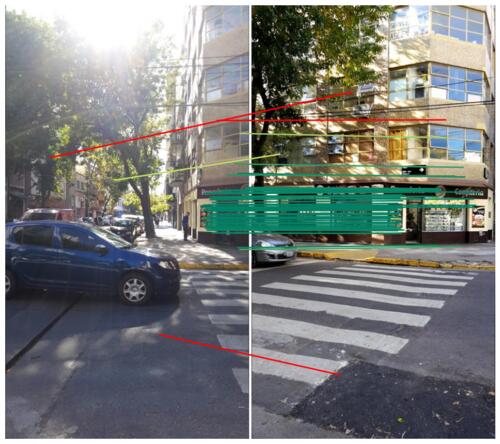
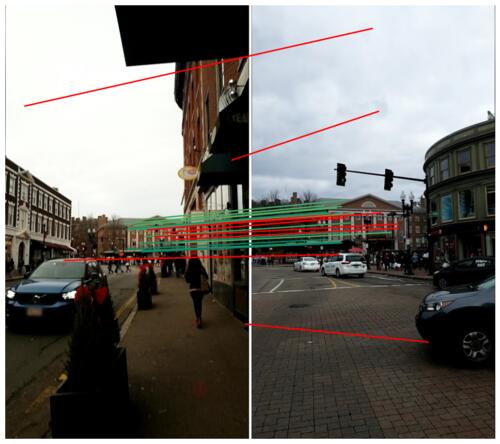
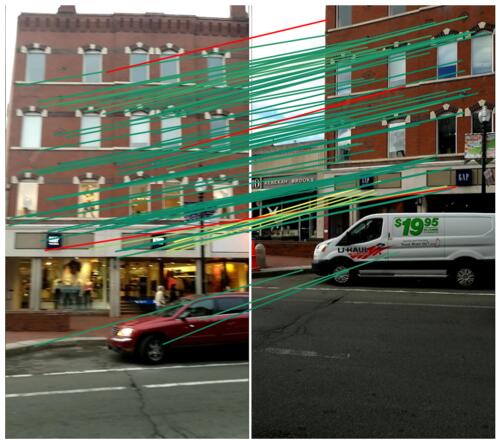
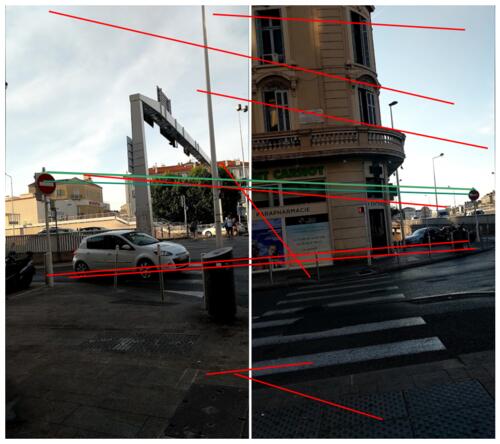
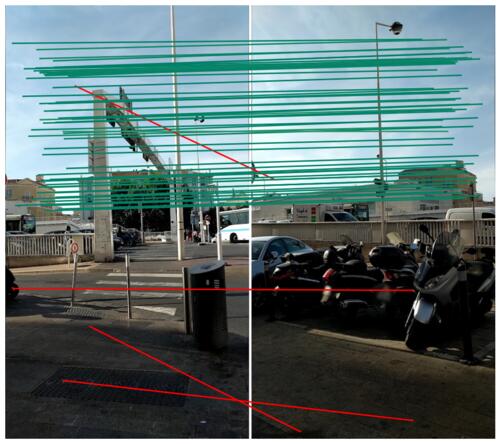
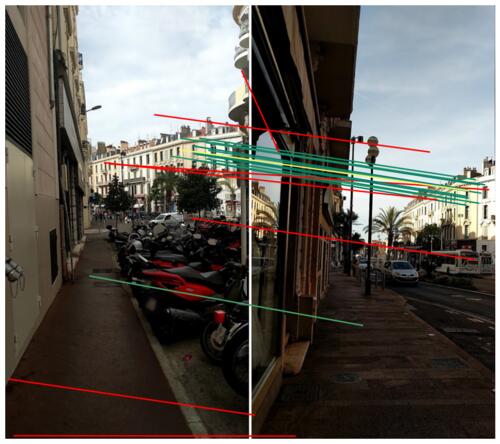
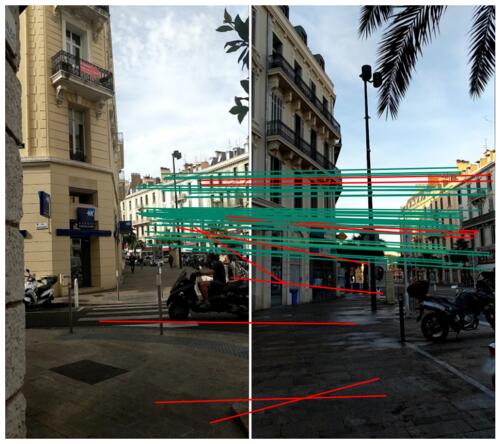
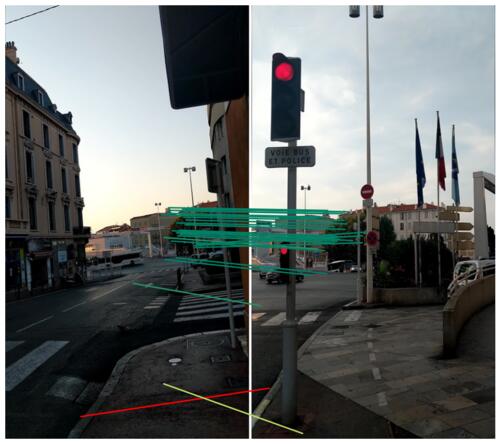
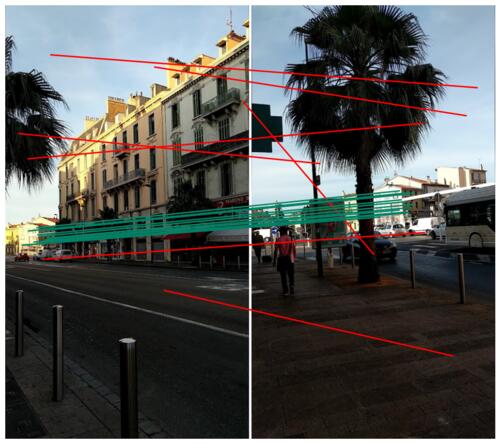
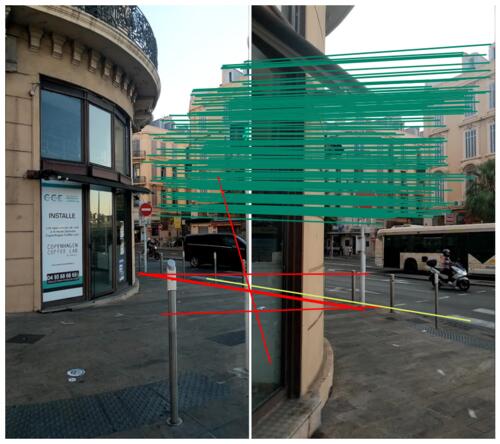
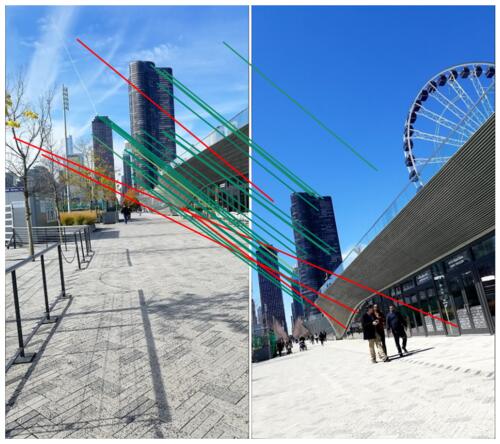
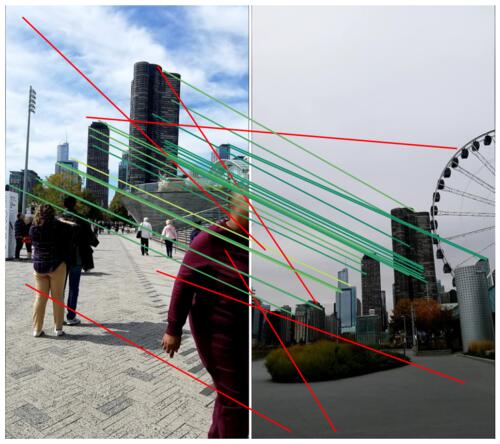
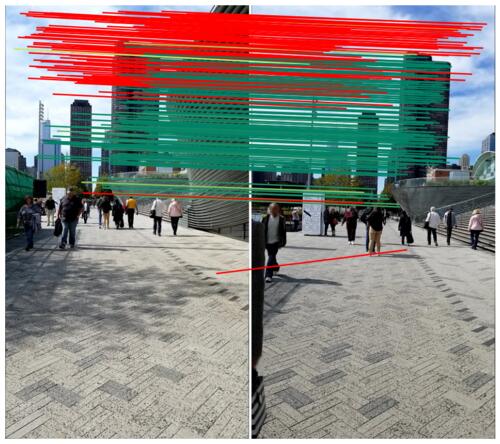
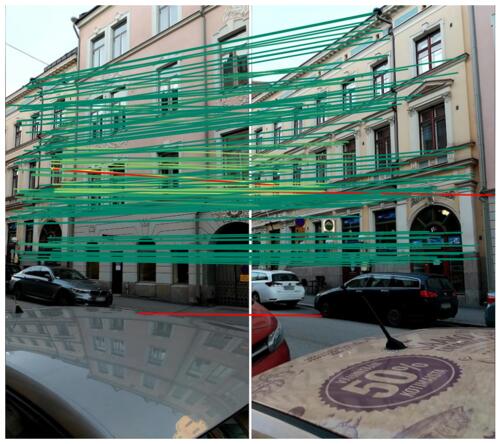
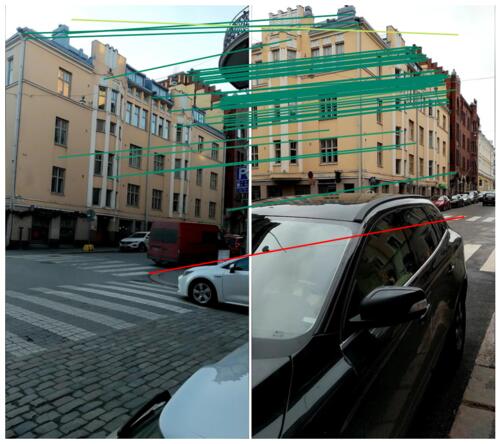
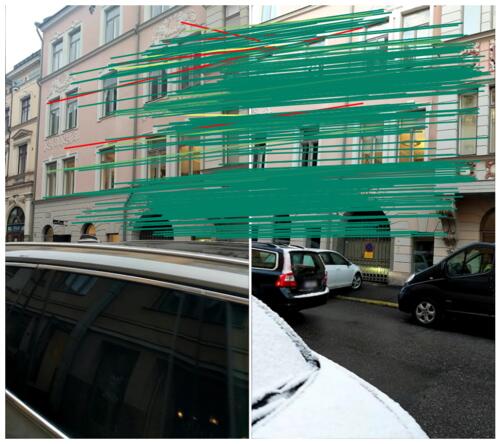
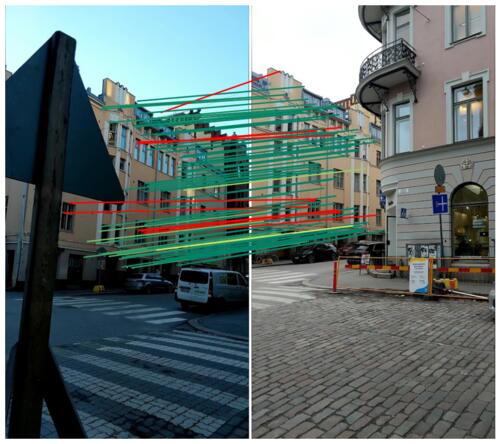
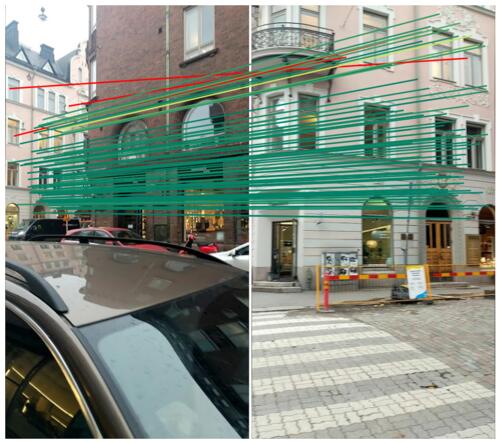
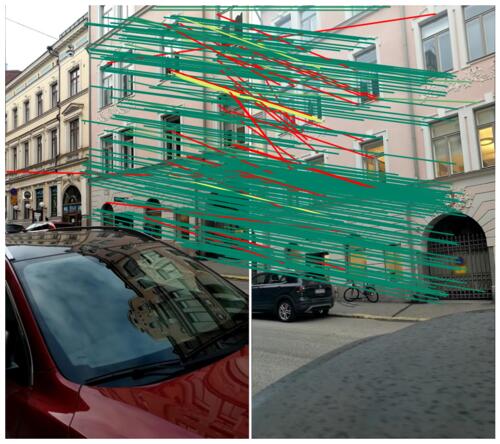
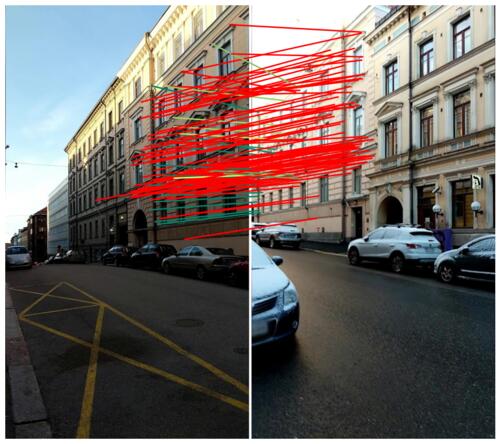
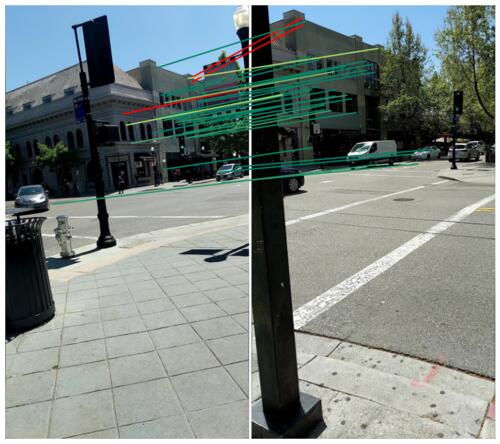
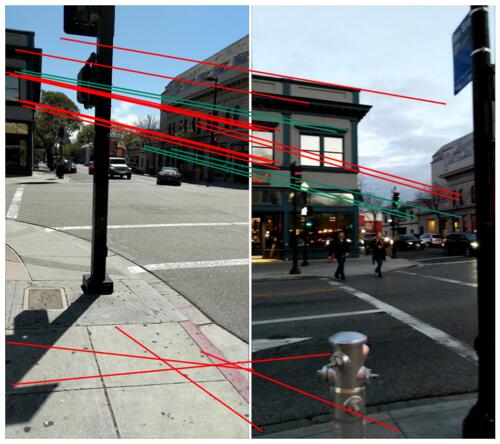
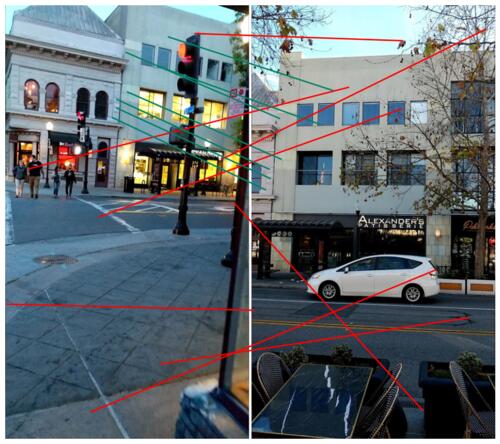
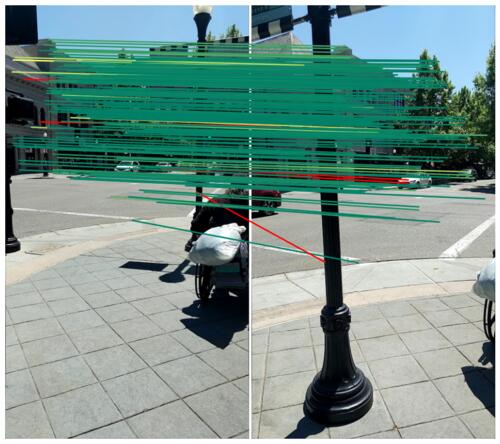
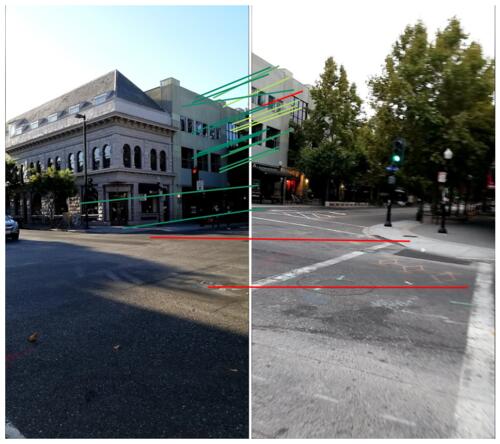
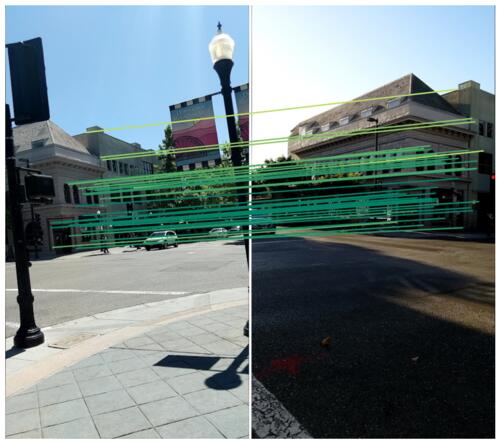
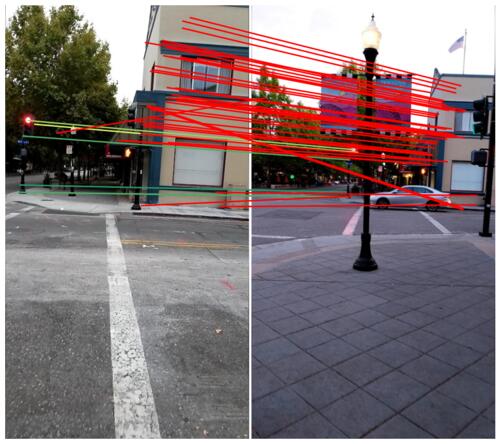
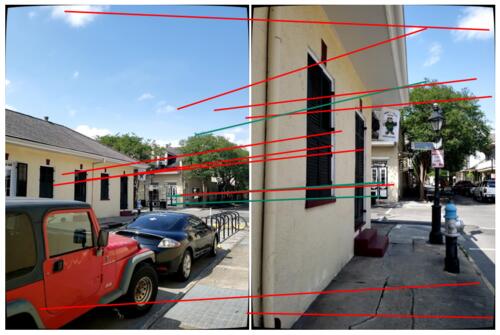
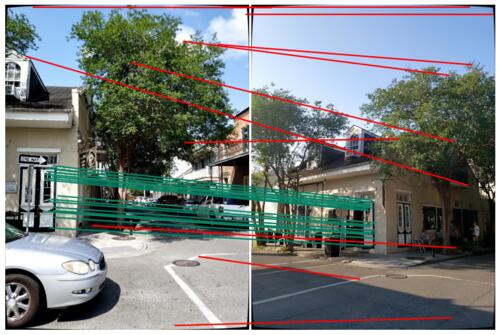
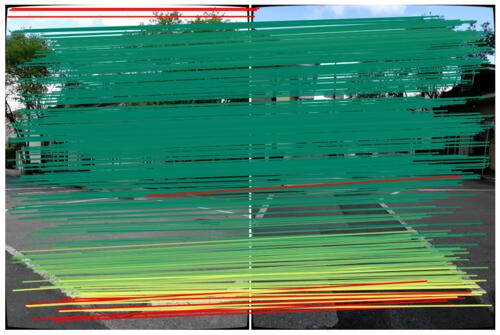
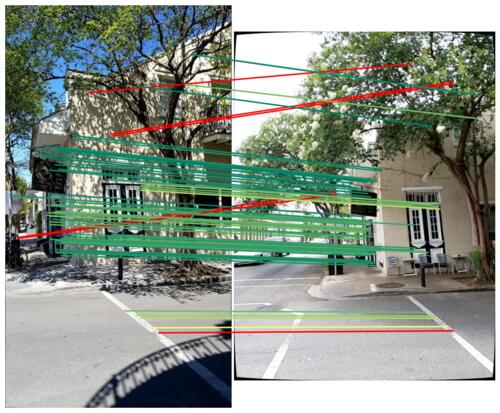
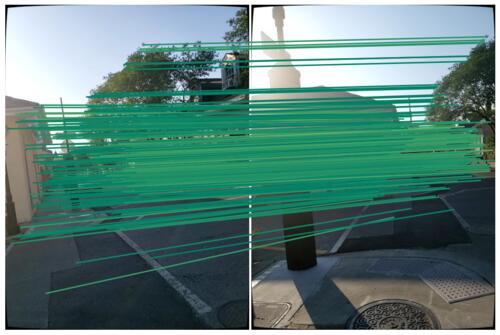
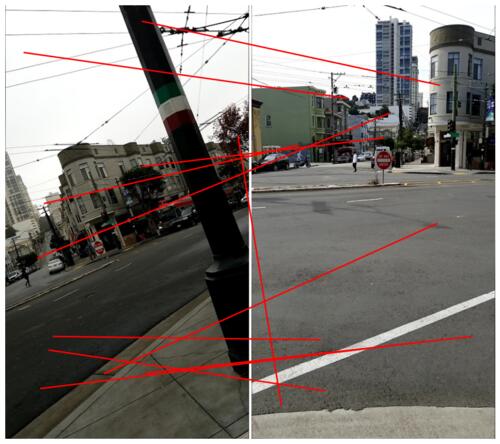
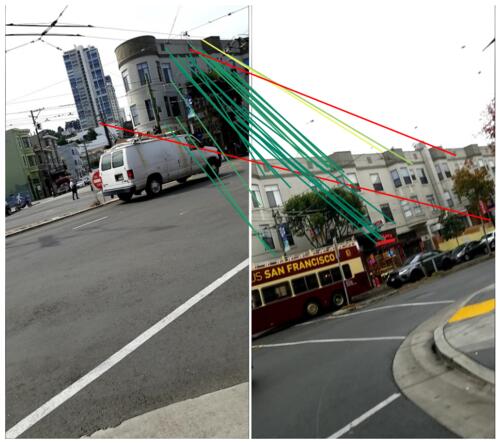
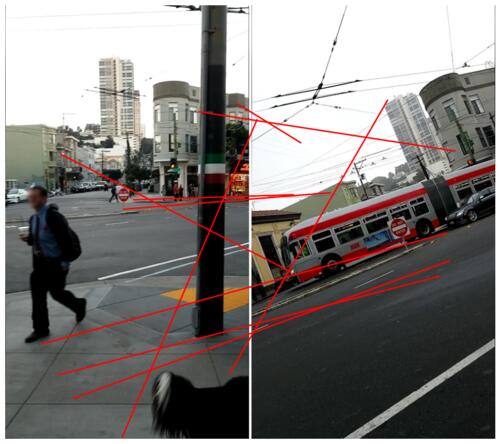
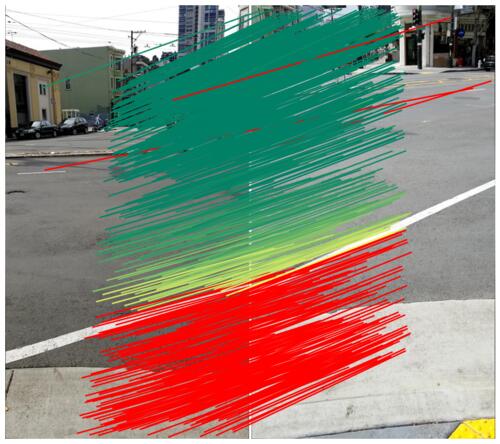
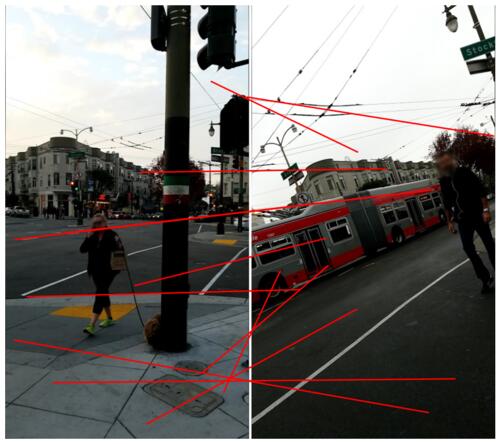
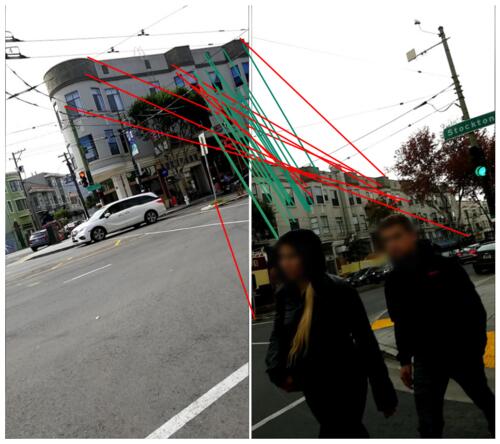
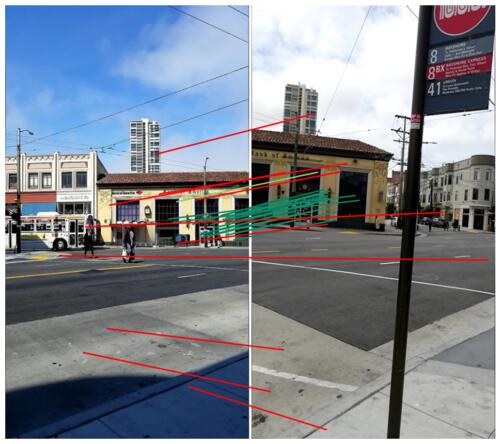
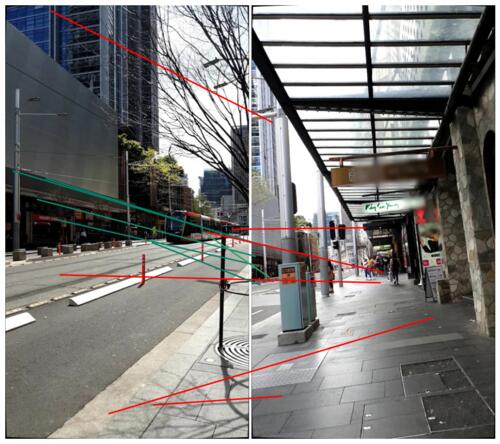
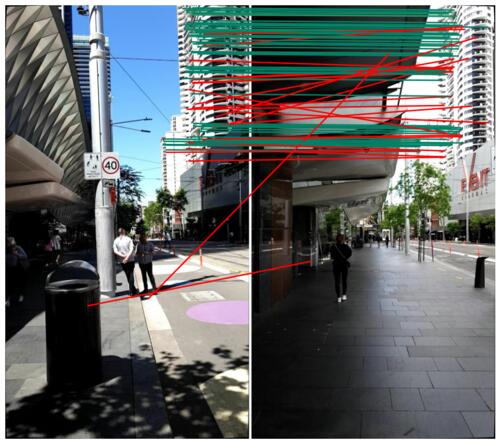
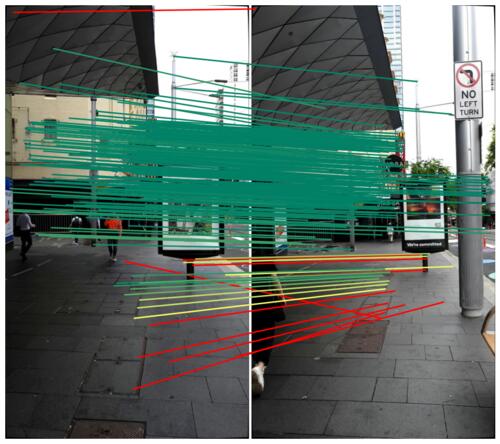
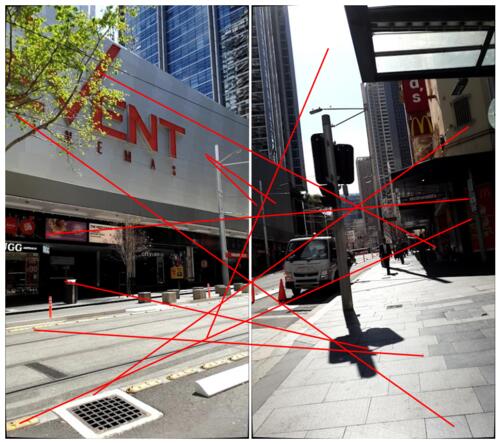
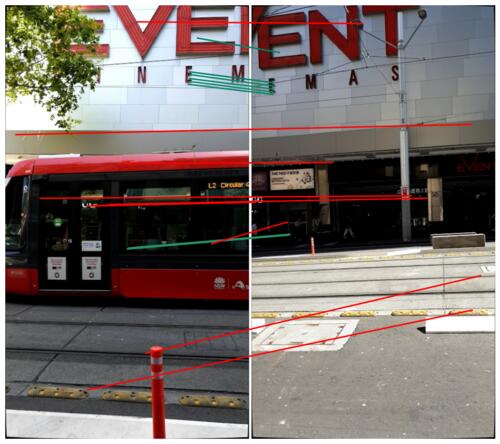
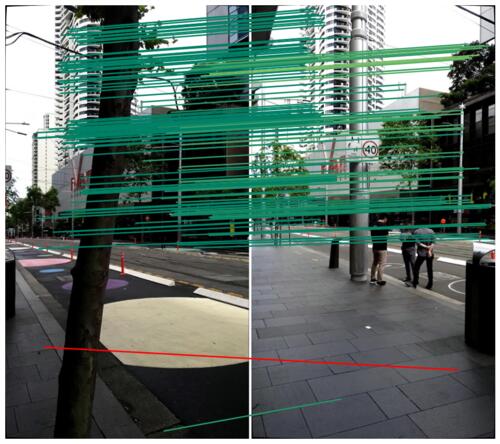
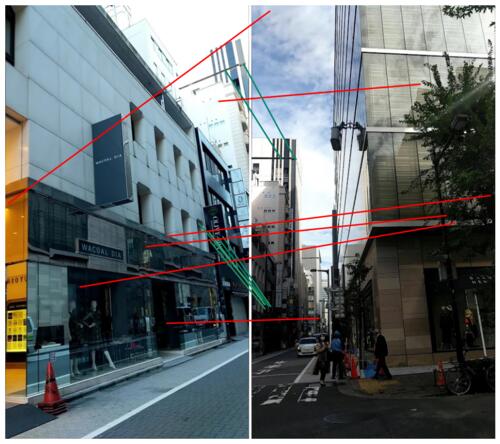
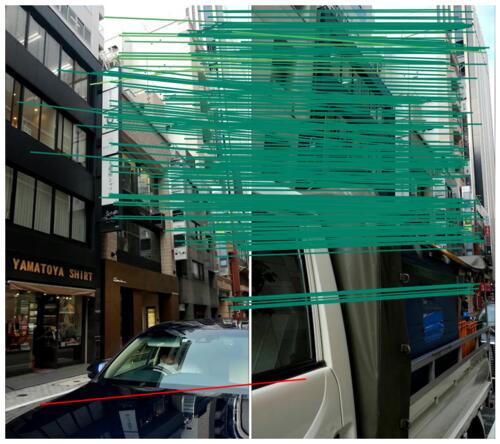
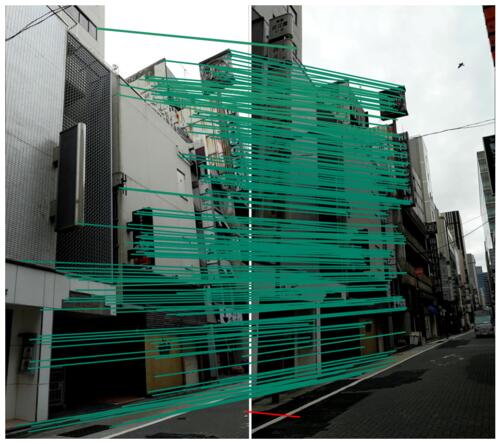
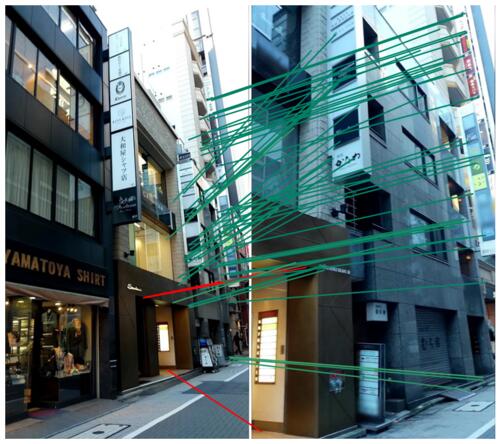
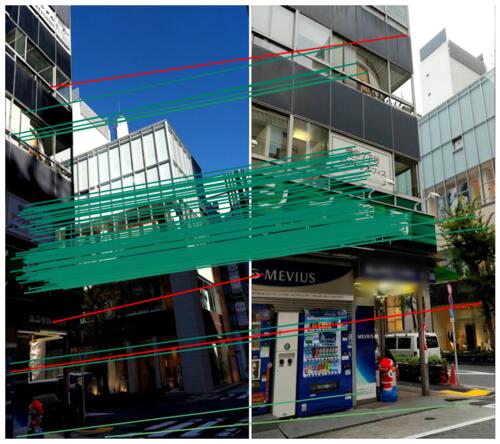
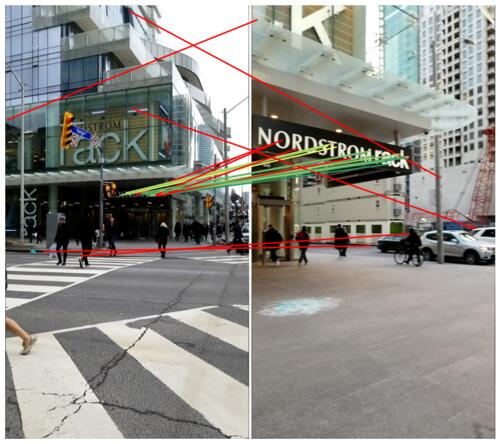
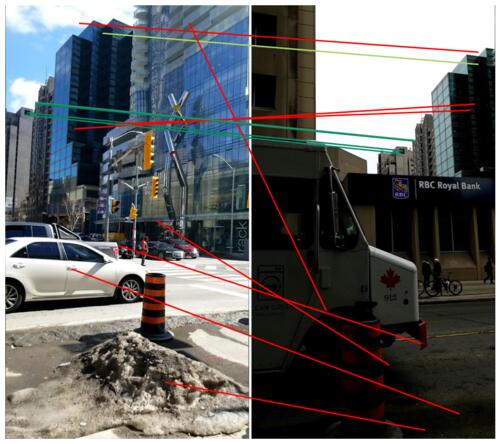
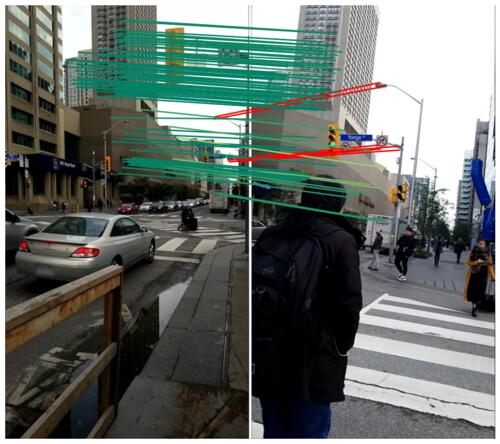
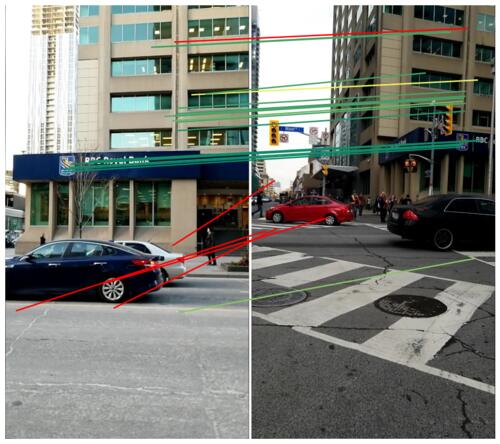
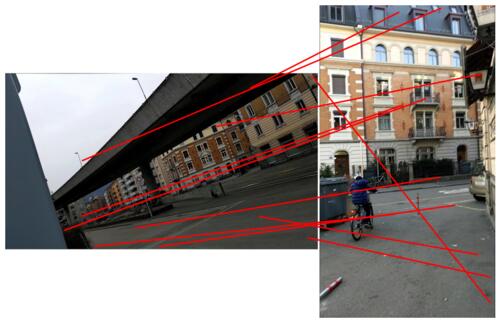
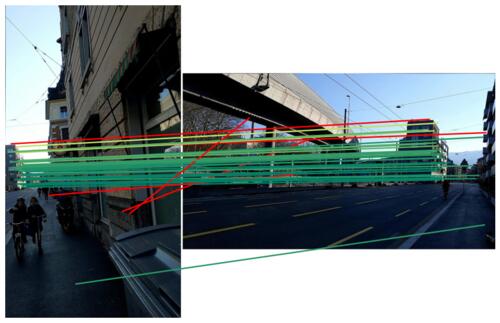
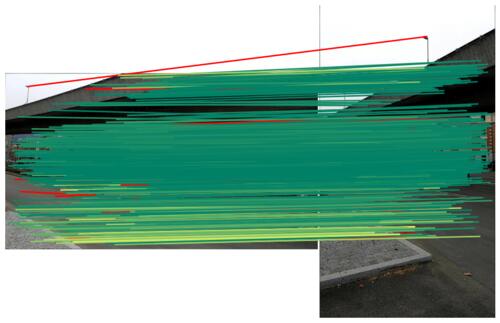
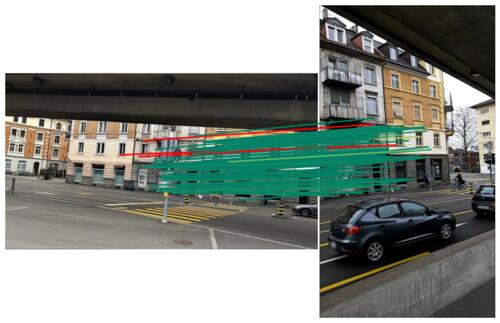
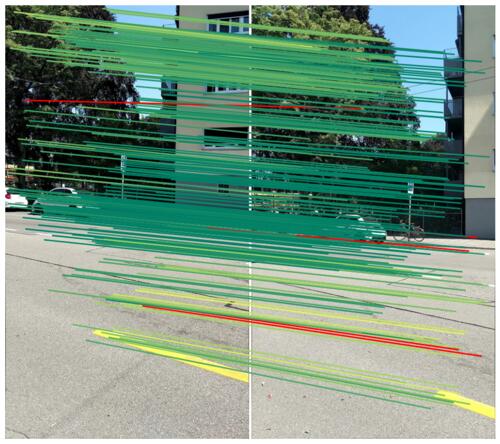
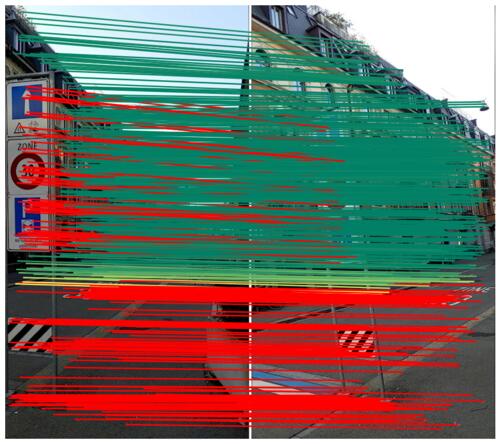
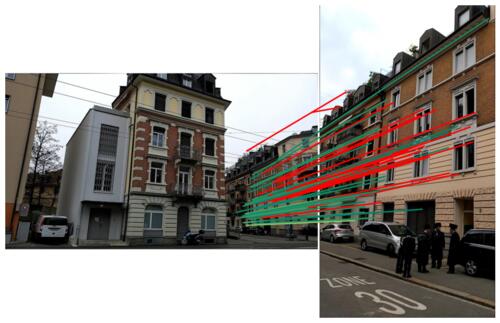
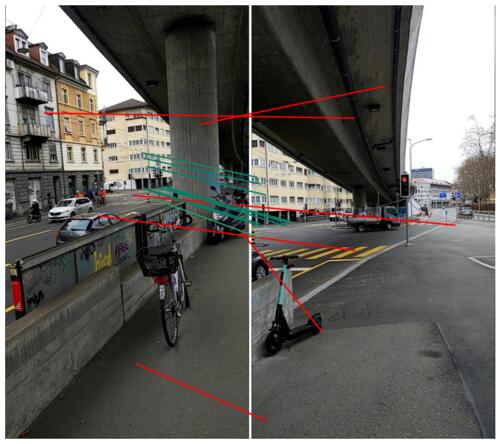
We show the inliers that survive the robust estimation loop (i.e. RANSAC), or those supplied with the submission if using custom matches. As the dataset does not contain depth, we color them based on the symmetric epopilar distance on normalized coordinates: from 0 (green) to 2e-4 (yellow), and in red above it. Note that these occasionally contain false positives.
— Amsterdam —



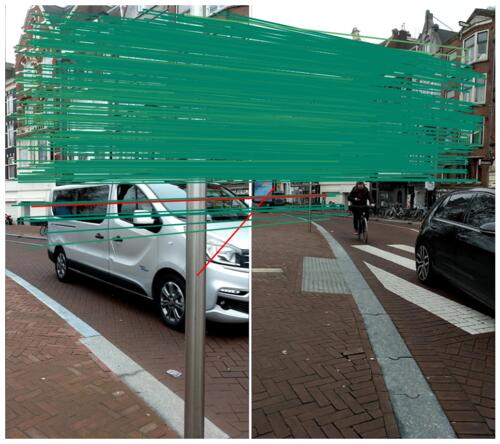
— Bangkok —






— Barcelona —




— Buenos Aires —





— Cambridge —



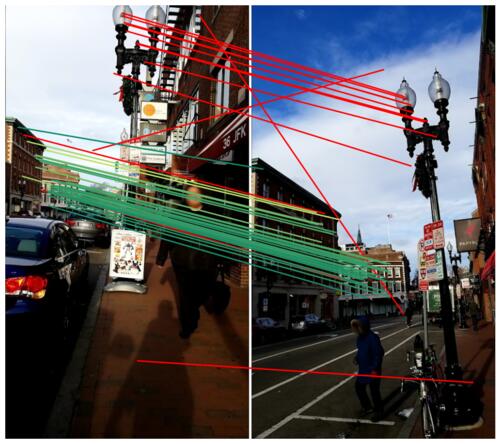
— Cannes —


— Chicago —


— Helsinki —

— Madrid —








— Mountain View —



— New Orleans —



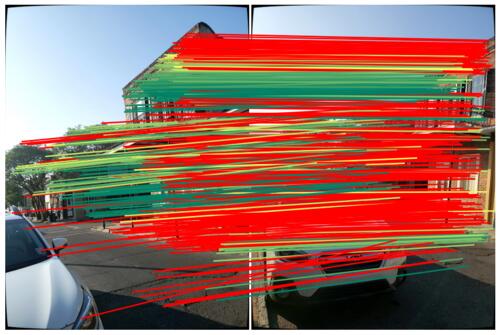

— San Francisco —



— Singapore —










— Sydney —




— Tokyo —





— Toronto —


— Zurich —
Google Urban dataset / Multiview track
mAA at 10 degrees: N/A (±0.00000 over 1 run(s) / ±0.11110 over 17 scenes)
Rank (per category): 27 (of 51)
| Scene | Features | Matches (input) |
RegistrationRatio (%) | Number of Landmarks |
Track Length | ATE | mAA(50) | mAA(100) |
| AMS | 5064.6 | 123.58 | 59.69 Rank: 27/51 |
707.95 Rank: 27/51 |
2.878 Rank: 28/51 |
12.65665 Rank: 2/51 |
0.07286 (±0.00000) Rank: 27/51 |
0.11058 (±0.00000) Rank: 27/51 |
| BGK | 5221.0 | 112.15 | 82.11 Rank: 27/51 |
897.39 Rank: 27/51 |
3.232 Rank: 25/51 |
10.12628 Rank: 2/51 |
0.01367 (±0.00000) Rank: 27/51 |
0.04274 (±0.00000) Rank: 27/51 |
| BCN | 4545.4 | 98.28 | 69.31 Rank: 26/51 |
593.00 Rank: 26/51 |
3.114 Rank: 25/51 |
18.04571 Rank: 2/51 |
0.05838 (±0.00000) Rank: 27/51 |
0.09546 (±0.00000) Rank: 27/51 |
| BAR | 5431.6 | 123.99 | 51.60 Rank: 27/51 |
326.10 Rank: 27/51 |
2.715 Rank: 26/51 |
5.75548 Rank: 2/51 |
0.00513 (±0.00000) Rank: 27/51 |
0.01482 (±0.00000) Rank: 27/51 |
| CAM | 5002.4 | 87.98 | 55.36 Rank: 27/51 |
411.44 Rank: 27/51 |
2.710 Rank: 27/51 |
8.41854 Rank: 2/51 |
0.03913 (±0.00000) Rank: 27/51 |
0.06576 (±0.00000) Rank: 27/51 |
| CAN | 4810.6 | 117.90 | 51.68 Rank: 25/51 |
390.93 Rank: 24/51 |
2.783 Rank: 23/51 |
10.39605 Rank: 8/51 |
0.01181 (±0.00000) Rank: 25/51 |
0.02450 (±0.00000) Rank: 26/51 |
| CHI | 4589.0 | 69.28 | 54.00 Rank: 26/51 |
212.72 Rank: 24/51 |
2.895 Rank: 26/51 |
34.20100 Rank: 5/51 |
0.00355 (±0.00000) Rank: 26/51 |
0.01633 (±0.00000) Rank: 26/51 |
| HEL | 5608.3 | 200.50 | 84.23 Rank: 25/51 |
1658.28 Rank: 26/51 |
3.050 Rank: 26/51 |
13.08747 Rank: 18/51 |
0.21896 (±0.00000) Rank: 24/51 |
0.35994 (±0.00000) Rank: 23/51 |
| MAD | 6004.1 | 98.59 | 72.05 Rank: 26/51 |
706.35 Rank: 27/51 |
3.002 Rank: 24/51 |
3.19445 Rank: 1/51 |
0.02204 (±0.00000) Rank: 26/51 |
0.05590 (±0.00000) Rank: 26/51 |
| MTV | 5148.7 | 86.83 | 57.79 Rank: 27/51 |
398.99 Rank: 27/51 |
2.785 Rank: 27/51 |
7.25418 Rank: 2/51 |
0.03428 (±0.00000) Rank: 27/51 |
0.06394 (±0.00000) Rank: 27/51 |
| NOR | 5063.9 | 106.16 | 41.41 Rank: 27/51 |
248.23 Rank: 26/51 |
2.531 Rank: 27/51 |
3.02344 Rank: 1/51 |
0.00907 (±0.00000) Rank: 27/51 |
0.01623 (±0.00000) Rank: 27/51 |
| SF | 5023.4 | 96.26 | 48.81 Rank: 27/51 |
383.28 Rank: 27/51 |
2.687 Rank: 25/51 |
5.14691 Rank: 2/51 |
0.00522 (±0.00000) Rank: 27/51 |
0.01497 (±0.00000) Rank: 27/51 |
| SG | 6042.3 | 127.69 | 56.61 Rank: 25/51 |
504.38 Rank: 26/51 |
2.885 Rank: 23/51 |
10.81913 Rank: 5/51 |
0.04290 (±0.00000) Rank: 25/51 |
0.06849 (±0.00000) Rank: 25/51 |
| SYD | 5518.2 | 109.46 | 60.80 Rank: 25/51 |
407.55 Rank: 26/51 |
2.864 Rank: 24/51 |
6.55770 Rank: 2/51 |
0.05547 (±0.00000) Rank: 27/51 |
0.09387 (±0.00000) Rank: 27/51 |
| TOK | 5494.4 | 139.97 | 75.97 Rank: 24/51 |
1044.02 Rank: 26/51 |
3.122 Rank: 22/51 |
7.94783 Rank: 5/51 |
0.35097 (±0.00000) Rank: 22/51 |
0.40673 (±0.00000) Rank: 22/51 |
| TOR | 6037.9 | 84.03 | 57.03 Rank: 26/51 |
309.35 Rank: 26/51 |
2.833 Rank: 25/51 |
9.81537 Rank: 3/51 |
0.01900 (±0.00000) Rank: 27/51 |
0.04270 (±0.00000) Rank: 27/51 |
| ZRH | 4937.5 | 108.28 | 59.86 Rank: 26/51 |
662.36 Rank: 27/51 |
2.839 Rank: 25/51 |
10.16493 Rank: 3/51 |
0.01925 (±0.00000) Rank: 25/51 |
0.04115 (±0.00000) Rank: 26/51 |
| Avg | 5267.3 | 111.23 | 61.08 Rank: 26/51 |
580.14 Rank: 27/51 |
2.878 Rank: 24/51 |
10.38889 Rank: 2/51 |
0.05775 (±0.00000) Rank: 27/51 |
0.09024 (±0.00000) Rank: 27/51 |
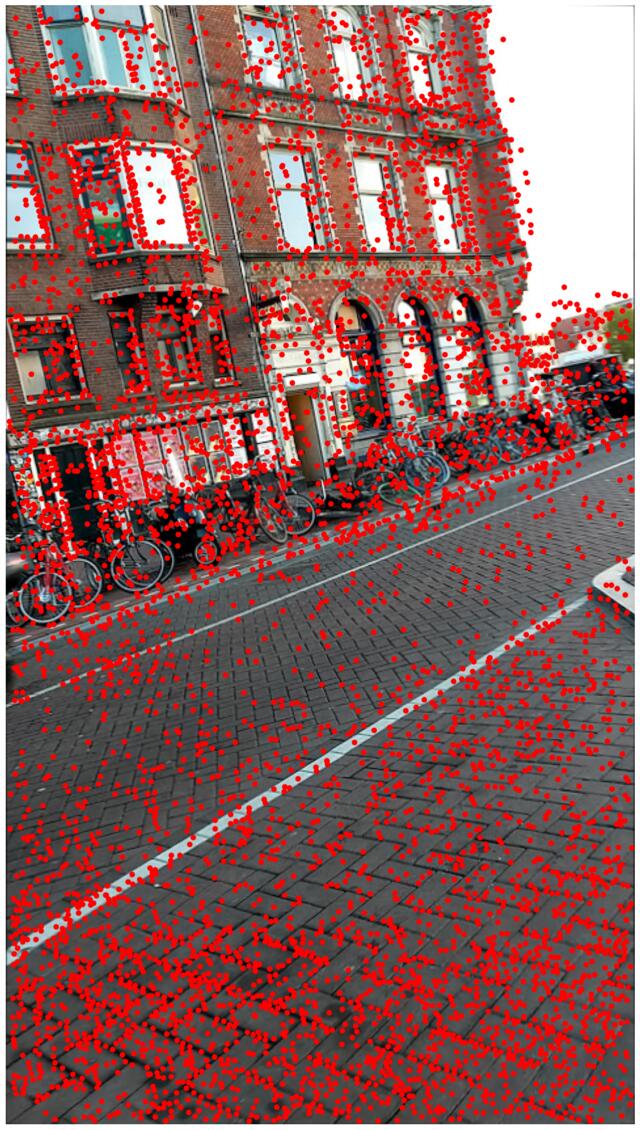
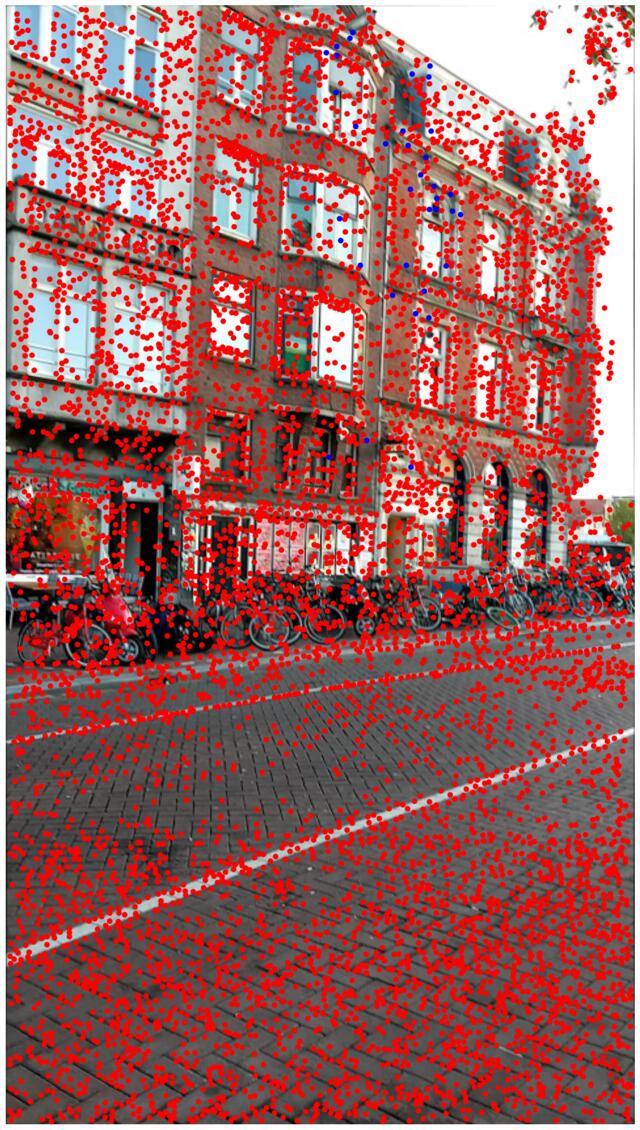
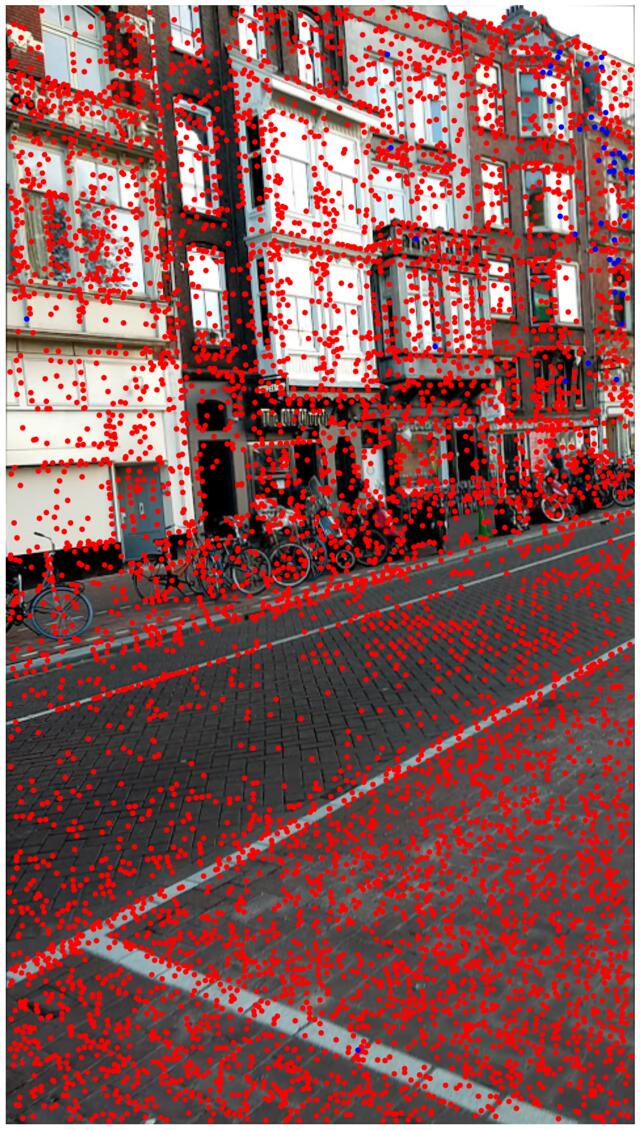
In the multi-view track we reconstruct the scene with Structure-from-Motion (Colmap) with small sets of images. We show the results for one bag of 10 images. Keypoints are drawn in blue if they are part of the model, and in red otherwise.
— Amsterdam —





— Bangkok —



— Barcelona —
— Buenos Aires —

— Cambridge —




— Cannes —


— Chicago —

— Helsinki —




— Madrid —



— Mountain View —


— New Orleans —


— San Francisco —

— Singapore —





— Sydney —




— Tokyo —




— Toronto —

— Zurich —