Starting and Calibrating ACME
If kiewa has been rebooted, then the motion controller card will have been reset, which means that the gantry and linear stages will have to be recalibrated. Log in to kiewa, and then do the following:- Run
% /usr/bin/rtpatchThis makes real-time Solaris extensions callable by regular users.
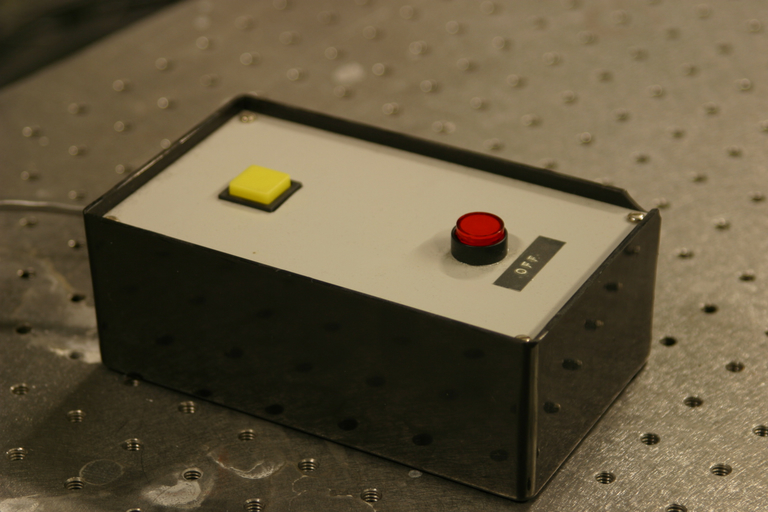
- Turn off the gantry/stage power by hitting the red button on the big power box (which connects to the controller rack through a long grey cable).
- Run
% acmebootThe program will ask if you know what you're doing; enter "yes".
- Make sure the gantry x axis (long side of the frame) is about 200 mm from its most negative direction of travel. You can position it by hand by manually turning the axle (this is the long spline that runs across the gantry at the positive end of the x axis).
- Turn on the gantry/stage power by hitting the yellow button on the big power box. The pan/tilt head will move briefly as it autocalibrates; wait for this to stop.
- Run
% acmehomeThis will move the gantry z first, then gantry y, then a few other joints in the test station, linear stage, and gantry. The process takes a few minutes, and should produce a bunch of output that looks like this:HOME: gantry-Z start: chan2: mode=1 setp=+00000041 curp=+00000041 maxerr=0000 search:chan2: mode=1 setp=+00001229 curp=+00001323 maxerr=0000 switch:chan2: mode=1 setp=-00104294 curp=-00104143 maxerr=0000 zero: chan2: mode=1 setp=-00099421 curp=-00099284 maxerr=0000 home: chan2: mode=1 setp=+00000000 curp=-00000023 maxerr=0121 HOME: gantry-Y start: chan1: mode=1 setp=-00000001 curp=-00000001 maxerr=0000 search:chan1: mode=1 setp=-00010005 curp=-00010005 maxerr=0000 ...finishing withHeadCfg: max step: 1000, start: 1000, accel: 16, power: 20 GPA Moving to joint values: -757.057 67.030 -150.385 -180.000 -0.000Sometimes, the calibration process will bail out prematurely, with a message likestageX not homedIf this happens, try calibrating again. If the problem repeats, it may be that the amps in the controller rack need to be power cycled. To do this, haltkiewafirst (kiewais connected to the rack). The proper way to haltkiewais with the/etc/haltcommand, but you need an admin to do this. Otherwise, runsynca few times from the keyboard and then power cycle the rack using the switch on the bottom panel. Do not power offkiewaseparately (a sign onkiewawill remind you of this).
Dealing with calibration problems
These procedures are not guaranteed to work, but they have done so in the past. Lubricating the parts (especially the rotation stage) and removing dust every now and again should help too.stage2 not homed
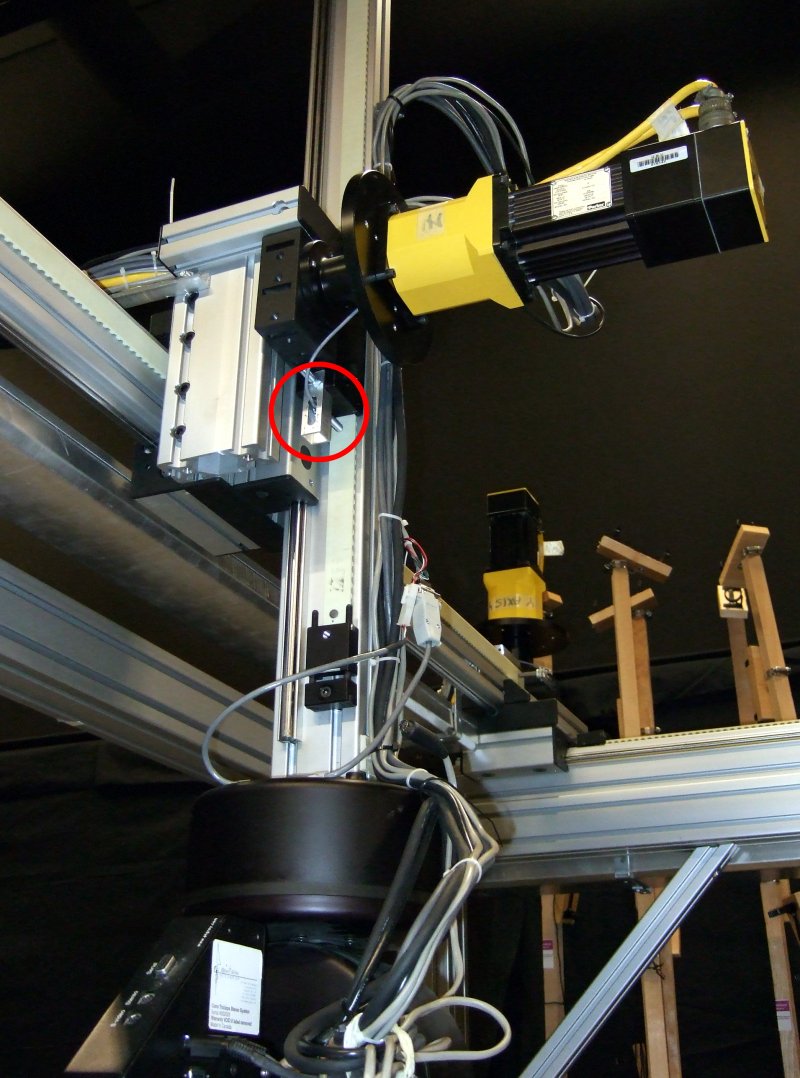
This culprit in this case is the gantry z-axis. There is an impedance sensor on it to detect when it has moved all the to the top of its travel range (see attached image). There is a yellow light in the sensor (where the wire enters) which comes on when the marker on the drive belt is sufficiently close to the tip. This should not be on while the gantry is sitting ilde waiting for you to issue the acmehome command. Loosen the nut and tilt the tip of the sensor as far upwards as you can. When you fasten the nut again, the light should go off. Try acmehome again.stage3 not homed
This is the linear stage. Power cycling kiewa seems to do the trick. -- BradAtcheson - 16 Dec 2006

| I | Attachment | History | Action | Size | Date | Who | Comment |
|---|---|---|---|---|---|---|---|
| |
z-axis-sensor.jpg | r1 | manage | 152.0 K | 2006-12-16 - 22:43 | BradAtcheson | z-axis impedance sensor |
Topic revision: r3 - 2006-12-16 - BradAtcheson

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Ideas, requests, problems regarding TWiki? Send feedback