Basic Actuation
In this lab, I am adding actuator and electronics to move the puppets from Lab 1Design Process
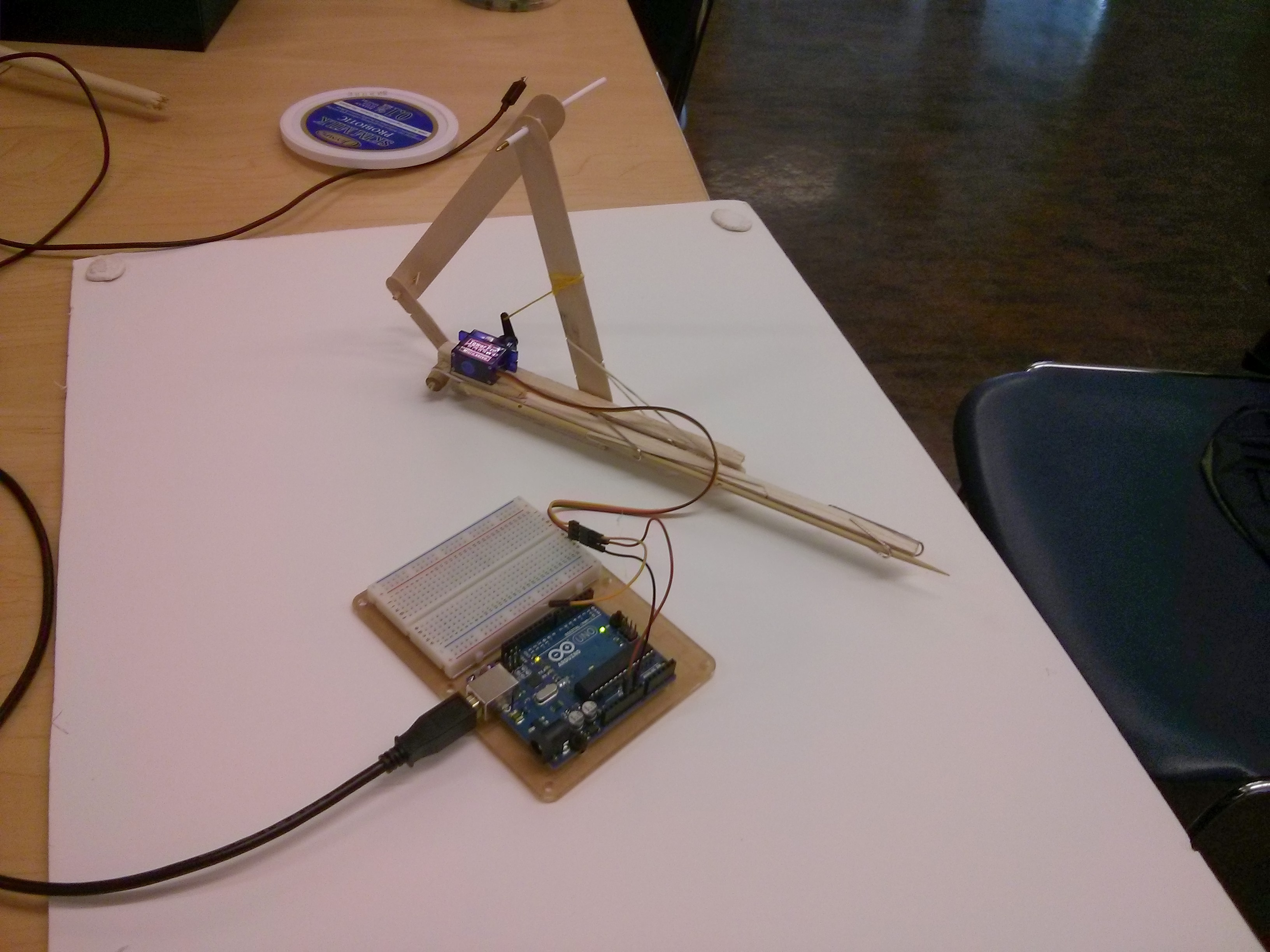
In the design phase, I began with an intention to actuate the 100mm arch puppet such that it could draw some variations of arch on a board. I added a servo motor to one of its link, then started to obtain some variability in motion. While varying the motion, I observed an interesting behavior actuated like a bird picking something from the ground. It was obtained by moving the links back and forth to obtain a certain kind of arch based on trial and observation. The speed of the servo motor was varied in a certain fashion. At the end of the arch that takes the link from air to the table floor, a slightly faster speed of the servo gave a feeling of quickly picking up something as if like a bird. Now, if it was a bird I wanted it to not only move its head but have a tail or something at the back to flutter while its picking. Then came the idea to use 10 mm puppet with a long linear actuator to plug into one of the shafts of the actuated arch puppet. And here it is.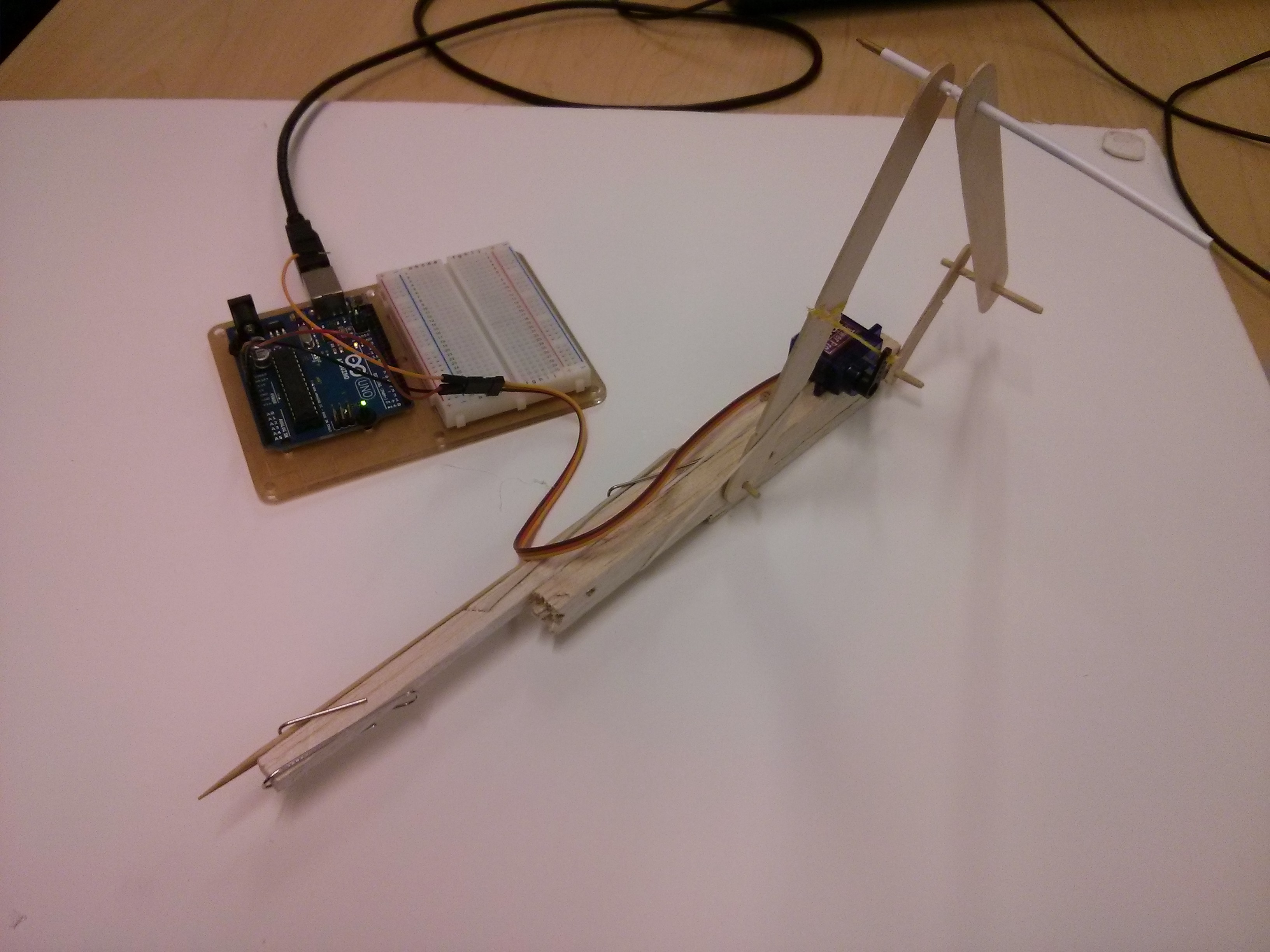
 And a video here: http://www.youtube.com/watch?v=ysG890BNLlc&feature=youtu.be
And a video here: http://www.youtube.com/watch?v=ysG890BNLlc&feature=youtu.beReflection
This lab was an interesting journey through design of a creature behavior using simple actuator. The end result used puppets designed in previous lab with an actuator having variability in speed and position as well as repeatability. This puppet converted an arch motion of a servo motor to a linear and a magnified arch motion. Now I am thinking to take this idea forward into developing this puppet with a feet and a head actuated to graze when its hungry during day. Stay tuned, in lab 3

| I | Attachment | History | Action | Size | Date | Who | Comment |
|---|---|---|---|---|---|---|---|
| |
image.jpg | r1 | manage | 1111.9 K | 2014-02-07 - 16:43 | BikramAdhikari | |
| |
image1.jpg | r1 | manage | 1102.8 K | 2014-02-07 - 17:02 | BikramAdhikari |
Topic revision: r4 - 2014-02-14 - BikramAdhikari

{kind=link}
{kind=link}
Ideas, requests, problems regarding TWiki? Send feedback