PartwiseMPC:
Interactive Control of Contact-Guided Motions
NILOOFAR KHOSHSIYARUniversity of British Columbia, Canada RUIYU GOU University of British Columbia, Canada TIANHONG ZHOU University of British Columbia, Canada SHELDON ANDREWS, École de Technologie Supérieure, Canada MICHIEL VAN DE PANNE, University of British Columbia, Canada
Paper: PDF
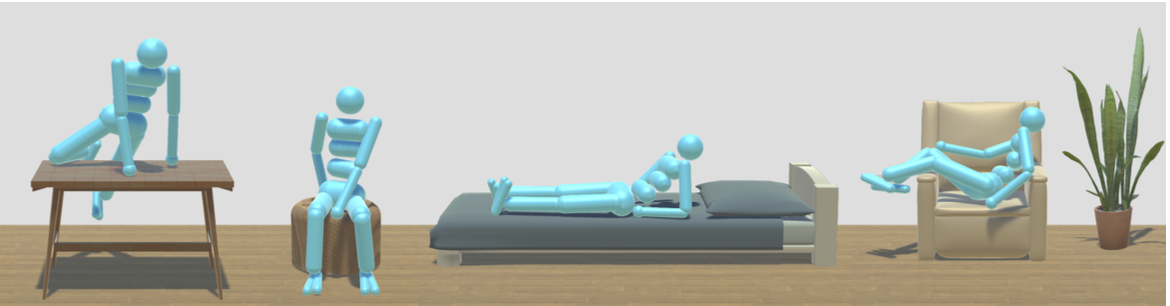
Physics-based character motions remain difficult to create and control. We make two contributions towards simpler specification and faster generation of physics-based control. First, we introduce a novel partwise model predictive control (MPC) method that exploits independent planning for body parts when this proves beneficial, while defaulting to whole-body motion planning when that proves to be more effective. Second, we introduce a new approach to motion specification, based on specifying an ordered set of contact keyframes. These each specify a small number of pairwise contacts between the body and the environment, and serve as loose specifications of motion strategies. Unlike regular keyframes or traditional trajectory optimization constraints, they are heavily under-constrained and have flexible timing. We demonstrate a range of challenging contact-rich motions that can be generated online at interactive rates using this framework. We further show the generalization capabilities of the method.
Video
Citation
@article{partwiseMPC,
author = {Khoshsiyar, Niloofar and Gou, Ruiyu, and Zhou, Tianhong and Andrews, Sheldon and van de Panne, Michiel},
title = {PartwiseMPC: Interactive Control of Contact-Guided Motions},
journal = {Computer Graphics Forum},
volume = {43},
number = {8},
year = {2024},
numpages = {12},
doi = {10.1111/cgf.15174}
}