

| I | Attachment | History | Action | Size | Date | Who | Comment |
|---|---|---|---|---|---|---|---|
| |
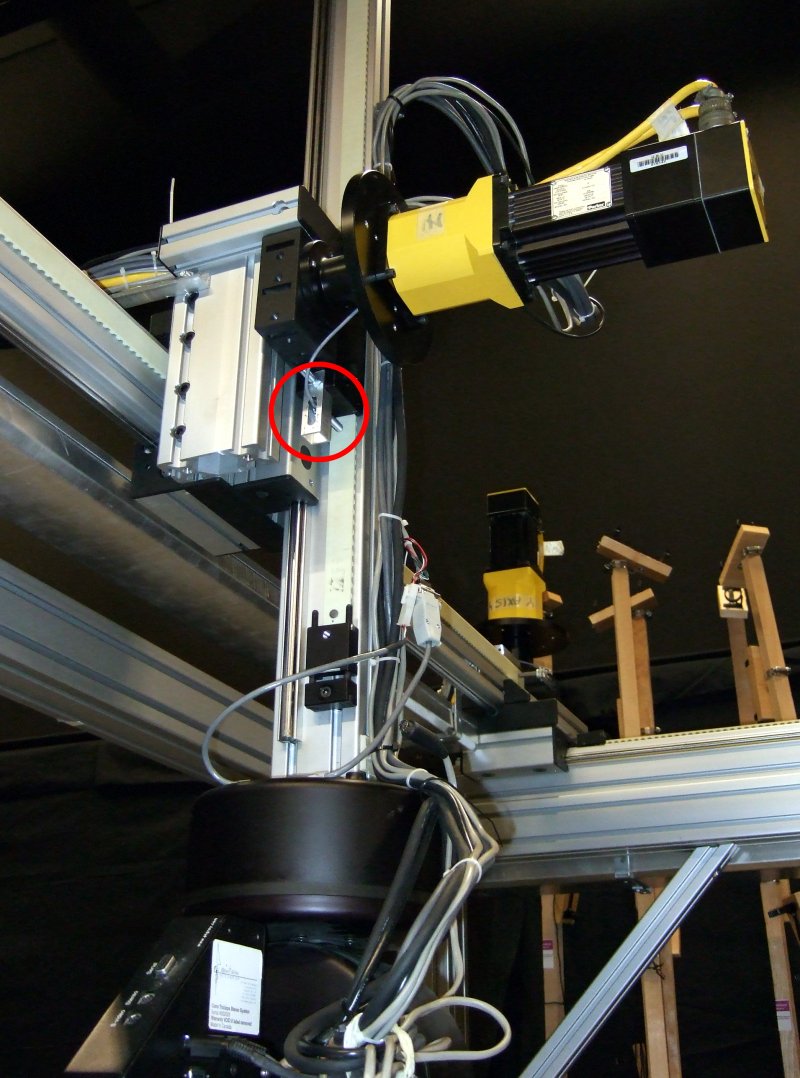
z-axis-sensor.jpg | r1 | manage | 152.0 K | 2006-12-16 - 22:43 | BradAtcheson | z-axis impedance sensor |
Topic revision: r4 - 2006-12-20 - BradAtcheson

{kind=link}
{kind=link}
Ideas, requests, problems regarding TWiki? Send feedback
| I | Attachment | History | Action | Size | Date | Who | Comment |
|---|---|---|---|---|---|---|---|
| |
z-axis-sensor.jpg | r1 | manage | 152.0 K | 2006-12-16 - 22:43 | BradAtcheson | z-axis impedance sensor |