Guide to Using ACME
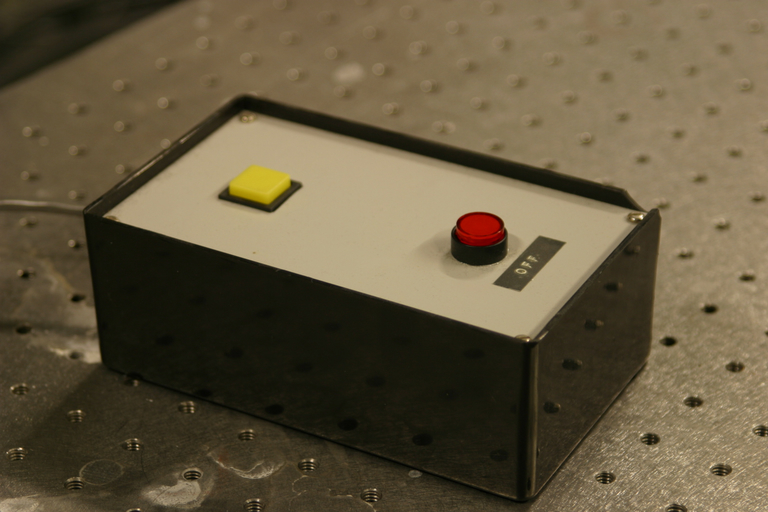
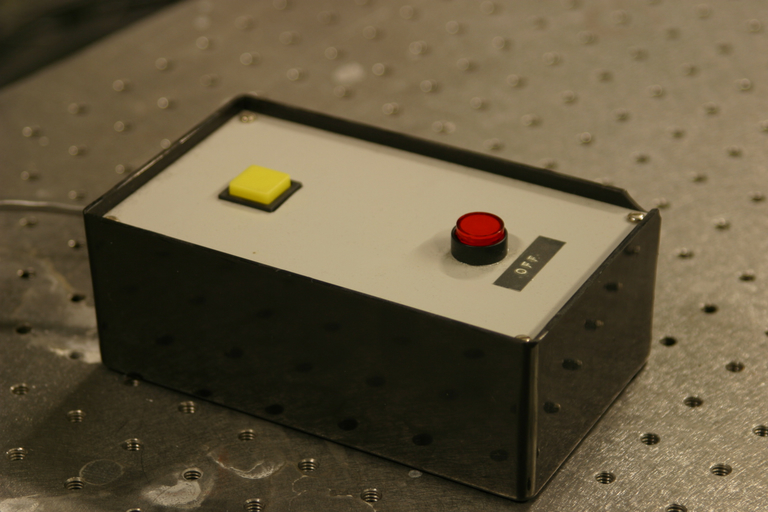
ACME is a robotic facility located in PSM. This guide discusses general procedures for running experiments on the low-level commandline interface. There are also a higher level C API, and an (even higher level) Java class hierarchy. Currently, there is no documentation for either of those in this location. IMPORTANT: whenever working with ACME, make sure that you switch off power at the end of the day (red button on the ACME Power Box)! Otherwise the amplifiers might burn through! And, of course, don't forget to switch power on (yellow button) before you start...- Environment Settings. Discusses how to set up a UNIX account for ACME use. This is required for all other operations.
- Reboot and Calibration. Procedures for calibrating ACME. These need to be executed every time the host
kiewais rebooted.
- Command Line Interface. Commands for operating the stages and gantry.
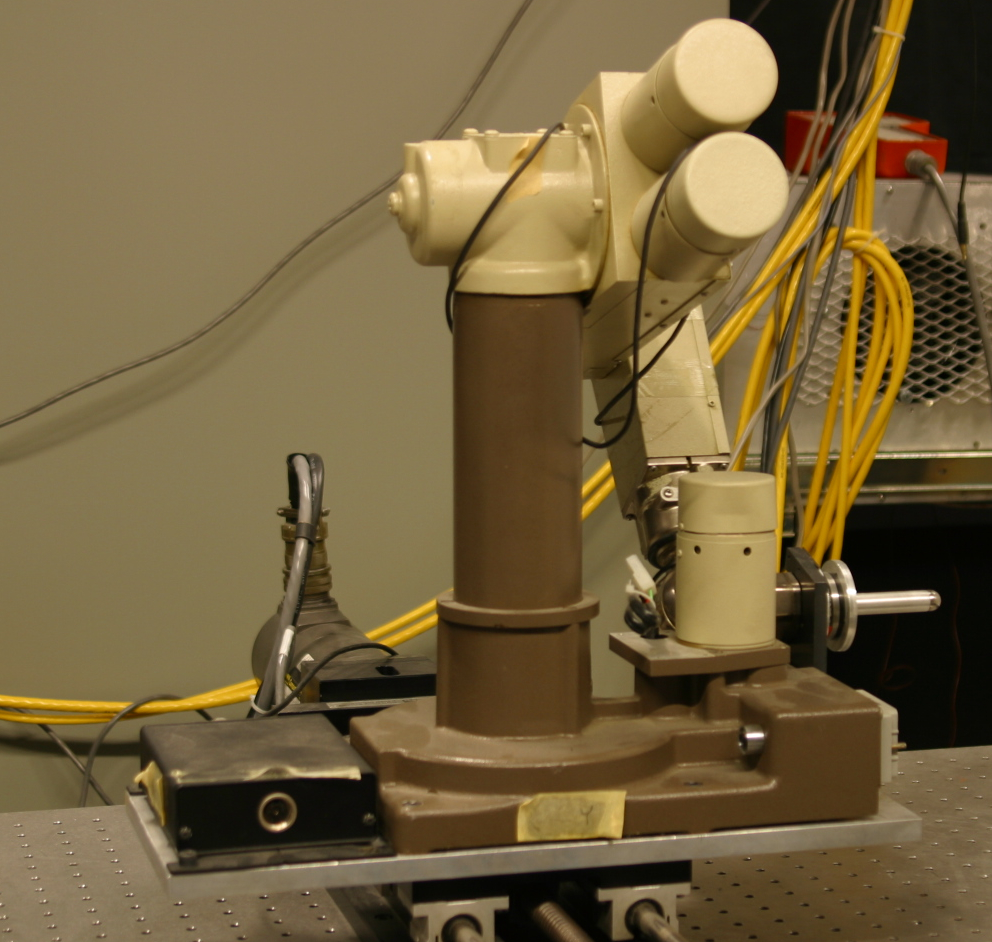
- Puma Robot. Procedures for calibrating the Puma robot.


| I | Attachment | History | Action | Size | Date | Who | Comment |
|---|---|---|---|---|---|---|---|
| |
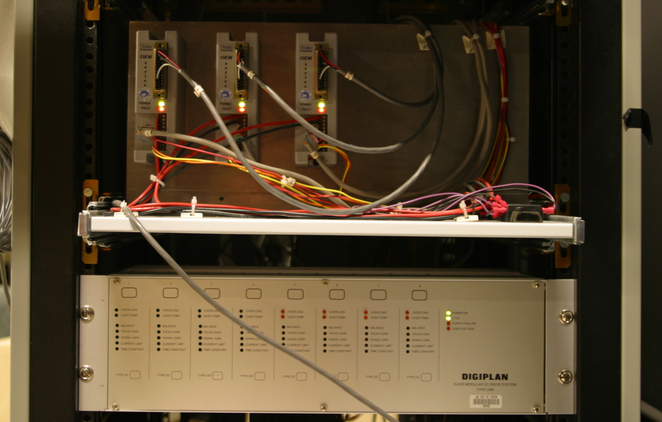
ACMEAmps.jpg | r1 | manage | 286.0 K | 2005-11-29 - 02:20 | WolfgangHeidrich | ACME stage and gantry ampliefiers |
| |
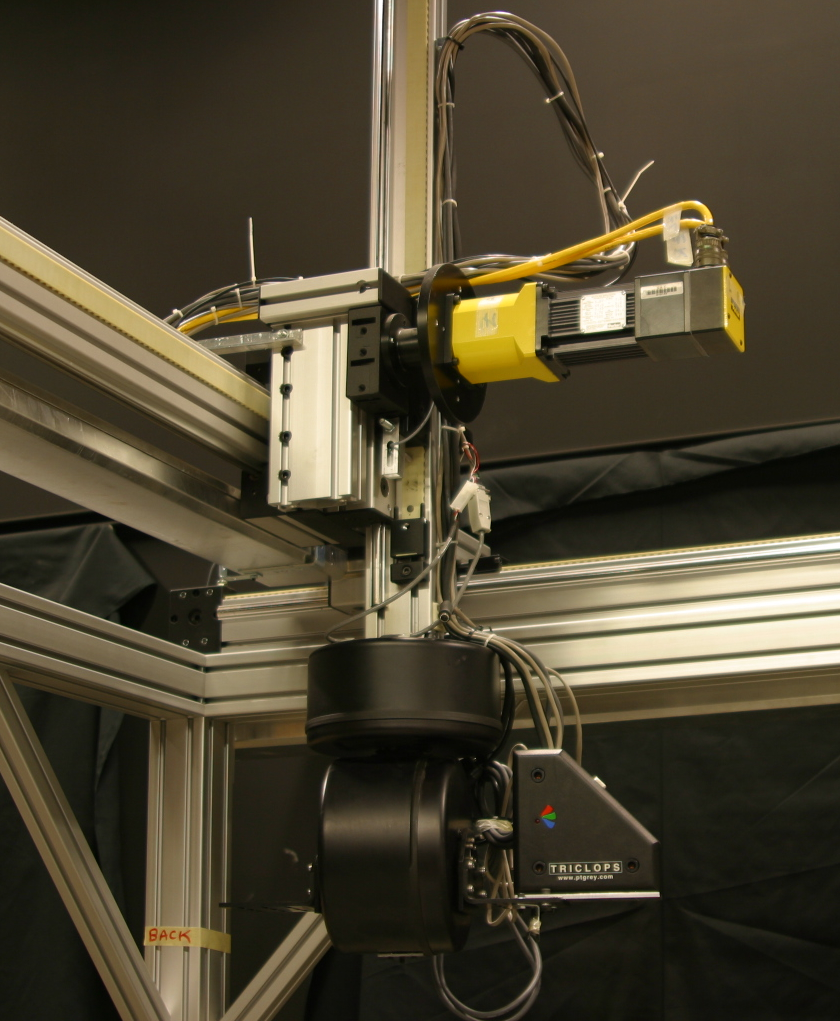
ACMEGantry.jpg | r1 | manage | 677.0 K | 2005-11-29 - 02:30 | WolfgangHeidrich | The gantry |
| |
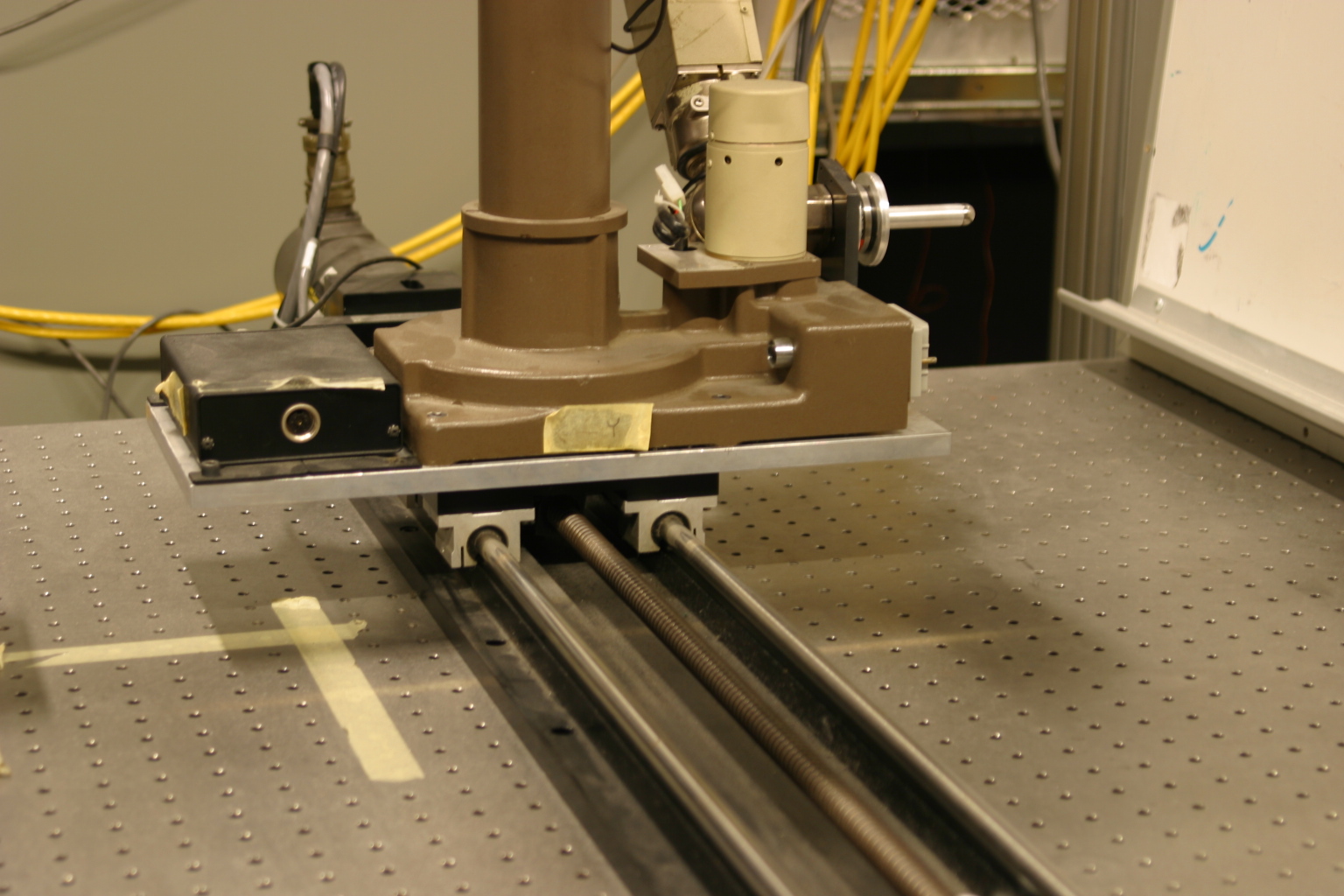
ACMELinear.jpg | r1 | manage | 499.4 K | 2005-11-29 - 02:21 | WolfgangHeidrich | The linear stage |
| |
ACMEPowerBox.jpg | r1 | manage | 338.3 K | 2005-11-29 - 02:06 | WolfgangHeidrich | ACME power box |
| |
ACMEPuma.jpg | r1 | manage | 675.6 K | 2005-11-29 - 02:42 | WolfgangHeidrich | The Puma robot |
| |
ACMEPumaPower.jpg | r1 | manage | 313.8 K | 2005-11-29 - 02:42 | WolfgangHeidrich | The Puma controller module |
| |
ACMEStage.jpg | r1 | manage | 580.7 K | 2005-11-29 - 02:23 | WolfgangHeidrich | The stage and turn table |
| |
ACMEkiewa.jpg | r1 | manage | 246.1 K | 2005-11-29 - 02:23 | WolfgangHeidrich | kiewa |
Topic revision: r2 - 2005-11-29 - WolfgangHeidrich

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Ideas, requests, problems regarding TWiki? Send feedback