Difference: ActiveMeasurementFacility (1 vs. 2)
Revision 22005-11-29 - WolfgangHeidrich
| Line: 1 to 1 | |||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Guide to Using ACMEACME is a robotic facility located in PSM. This guide discusses general procedures for running experiments on the low-level commandline interface. There are also a higher level C API, and an (even higher level) Java class hierarchy. Currently, there is no documentation for either of those in this location. | |||||||||||||||||
| Added: | |||||||||||||||||
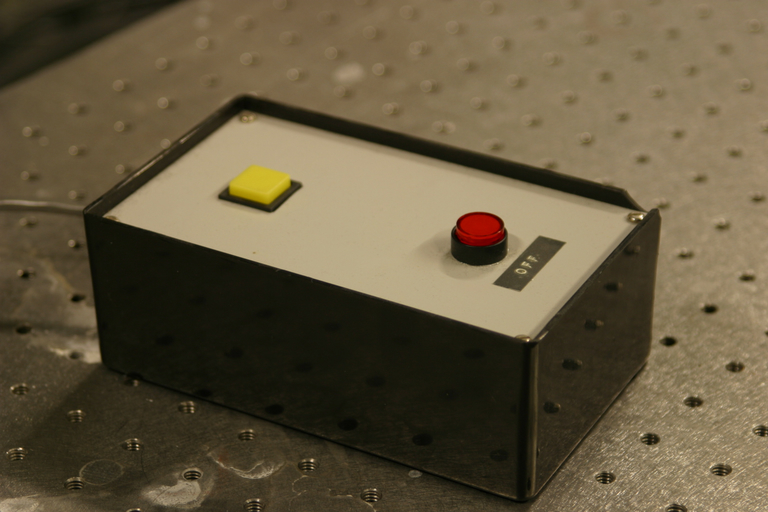
| > > | IMPORTANT: whenever working with ACME, make sure that you switch off power at the end of the day (red button on the ACME Power Box)! Otherwise the amplifiers might burn through! And, of course, don't forget to switch power on (yellow button) before you start... | ||||||||||||||||
| |||||||||||||||||
| Line: 13 to 15 | |||||||||||||||||
| |||||||||||||||||
| Changed: | |||||||||||||||||
| < < | -- WolfgangHeidrich - 24 Nov 2005 | ||||||||||||||||
| > > |
| ||||||||||||||||
{kind=link}
Revision 12005-11-24 - WolfgangHeidrich
| Line: 1 to 1 | ||||||||
|---|---|---|---|---|---|---|---|---|
| Added: | ||||||||
| > > |
Guide to Using ACMEACME is a robotic facility located in PSM. This guide discusses general procedures for running experiments on the low-level commandline interface. There are also a higher level C API, and an (even higher level) Java class hierarchy. Currently, there is no documentation for either of those in this location.
| |||||||
View topic | History: r2 < r1 | More topic actions...
Ideas, requests, problems regarding TWiki? Send feedback